电动车用永磁无刷电机无位置传感器控制研究
2017-03-08马桂芳刘生建
马桂芳,刘生建
(龙岩学院 机电工程学院,福建 龙岩 364012)
电动车用永磁无刷电机无位置传感器控制研究
马桂芳,刘生建
(龙岩学院 机电工程学院,福建 龙岩 364012)
针对传统电动车用永磁无刷直流电机中位置传感器所带来的一系列缺点,基于模型参考自适应法的原理,建立了正弦型永磁无刷直流电机模型参考自适应方法的数学模型。在Matlab/Simulink环境下构建了无位置传感器运行仿真系统,对无位置传感器进行仿真研究。实验和仿真结果表明,模型参考自适应方法可准确检测电机转子位置信号,基本满足了电动车用永磁无刷直流电机的运行要求。
电动车;永磁无刷直流电机;MRAS;无位置传感器
0 引言
两轮电动车与传统的自行车相比,具有省力、轻快和舒适的优点,与摩托车相比,运行费用低、零排放、无污染,已经逐渐成为人们生活中一种重要的绿色交通工具。电动车的动力系统由驱动电机、控制装置、蓄电池和充电器4个主要部件构成。电动车所用驱动电机是4个主要部件中最关键的动力源,其性能直接决定了电动车的整体运行性能。
永磁无刷直流电机(BLDCM)具有结构简单、体积小、调速性能好、功率密度高、安全可靠等优点。特别是随着永磁材料价格的下降、材料的磁性能提高、新型永磁材料的出现,以及电力电子技术的迅速发展,使得永磁无刷直流电机不断发展起来,在交通工具、家电、计算机、航空航天等领域得到广泛应用。近几年,永磁无刷直流电机应用于电动车电机驱动领域逐渐成为电动车研发的热点。
在永磁无刷直流电机正弦波控制策略中,软件算法比方波控制要复杂一些,但能获得较平滑的转矩输出性能,此控制方式需要知道精确的转子位置,所以电机上要安装一些与电机同轴相连的传感器,如开关型霍尔传感器、光电编码器、旋转变压器等来检测转子位置,使空间坐标系变换成为可能。而位置传感器也是永磁无刷直流电机系统中最脆弱的部分,会带来一系列的问题,存在如增加了系统成本和复杂性、在恶劣环境下不适用等缺点。因此,无位置传感器的永磁无刷直流电机技术的研究具有更广阔的应用前景[1]。
永磁无刷直流电机无位置传感器控制系统主要就是在不利用位置传感器的情况下能够实时准确地检测到转子的位置并将该信号及时反馈给控制系统。在过去几年中,人们提出了基于反电势法(反电势过零点法、反电势积分法、反电势锁相环法、反电势3次谐波积分法)、续流二极管法、电感法、电流法、磁链估计法和基于观测器的位置检测法等[2]。本研究中我们采用了模型参考自适应方法(Model Reference Adaptive System,MRAS)来估算转子位置,建立了永磁无刷直流电机MRAS数学模型,并对位置和速度辨识的正确性、电机的动态性进行了仿真研究。
1 MRAS原理
模型参考自适应方法的原理框图如图1所示,该系统由2个环路构成,内环由控制器和被控对象组成,外环由参考模型和自适应机构组成。参考模型是一个具有固定结构和恒定参数的理想系统,目标信号同时加在可调系统和参考模型上,通过比较被控对象与参考模型的输出或状态得到两者之间的误差e(t),自适应机构按照一定的自适应律来修正控制器的参数,从而使被控对象的输出尽可能跟随参考模型的输出。MRAS系统设计最关键的问题是如何决定和综合自适应律,其理论基础为局部参数优化方法、李雅普诺夫稳定性理论和波波夫(Popov)超稳定性理论[3]。

图1 模型参考自适应控制系统
2 正弦型永磁无刷直流电机MRAS数学模型
正弦型永磁无刷直流电机的物理结构与永磁同步电机相同,所以可以面装式永磁同步电机建立永磁无刷直流电机的数学模型。
以下为面装式永磁同步电动机在两相旋转坐标系中的数学模型[4]。

(1)
式(1)中u为电压;i为电流;ψ为磁链;d,q 2个下标分别表示定子直轴、交轴坐标分量; ωe为转子旋转角速度,在电机稳态运行时等于电源同步角频率ωf;Rs为定子绕组的电阻; Ls为定子绕组的等效同步电感;ψs,ψf分别为定、转子磁链矢量。
把式(1)化成矩阵形式为:
(2)

(3)
可得:
(4)
式(4)简写为:
(5)

根据以上数学模型可知,所得模型中电流模型中存在电机的转速ωe,确定电流模型为可调模型,电机本体则为参考模型。
参考模型和可调模型确定后,可以对自适应律进行设计。
(6)
式(6)简写为:
(7)
第1步,方程(5)减去方程(7)得:

(8)
定义广义误差为:


(9)
则式(8)可写为:
(10)
式(10)为定子电流矢量误差方程。
若选取D=I,则y=Ie=e,可得其传递函数为:
(11)

(12)
式(12)中,ki,kp≥0。
将式(4)代入式(12)得:
(13)

图2 模型参考自适应算法的运算框图
3 仿真研究
为了验证基于MRAS的转子位置检测原理的正确性和可行性,用Matlab/Simulink仿真软件对所提出的永磁无刷电机进行了无位置传感器矢量控制的仿真研究。采用MRAS的无位置传感器永磁无刷电机矢量控制系统结构框图如图3所示。永磁无刷电机仿真参数为:额定频率50 Hz,额定功率7.5 kW,额定电压72 V,额定电流170 A,额定转速3 000 r/min,相绕组电阻Rs=0.266 Ω,定子绕组的等效同步电感Ls=3.8 mH,电磁转矩系数为21 N·m/A,反电动势系数为0.17 V/(r·min-1),转动惯量为1.78 kg·m2,摩擦阻尼系数为0.025 N·m/(r·min-1)。

图3 采用MRAS的无位置传感器永磁无刷电机矢量控制系统结构框图



图4 转子速度和位置的实测值与估算值(600 r/min)


图5 转子速度和位置的估计误差(600 r/min)


图6 转子速度和位置的实测值与估算值(3 000 r/min)

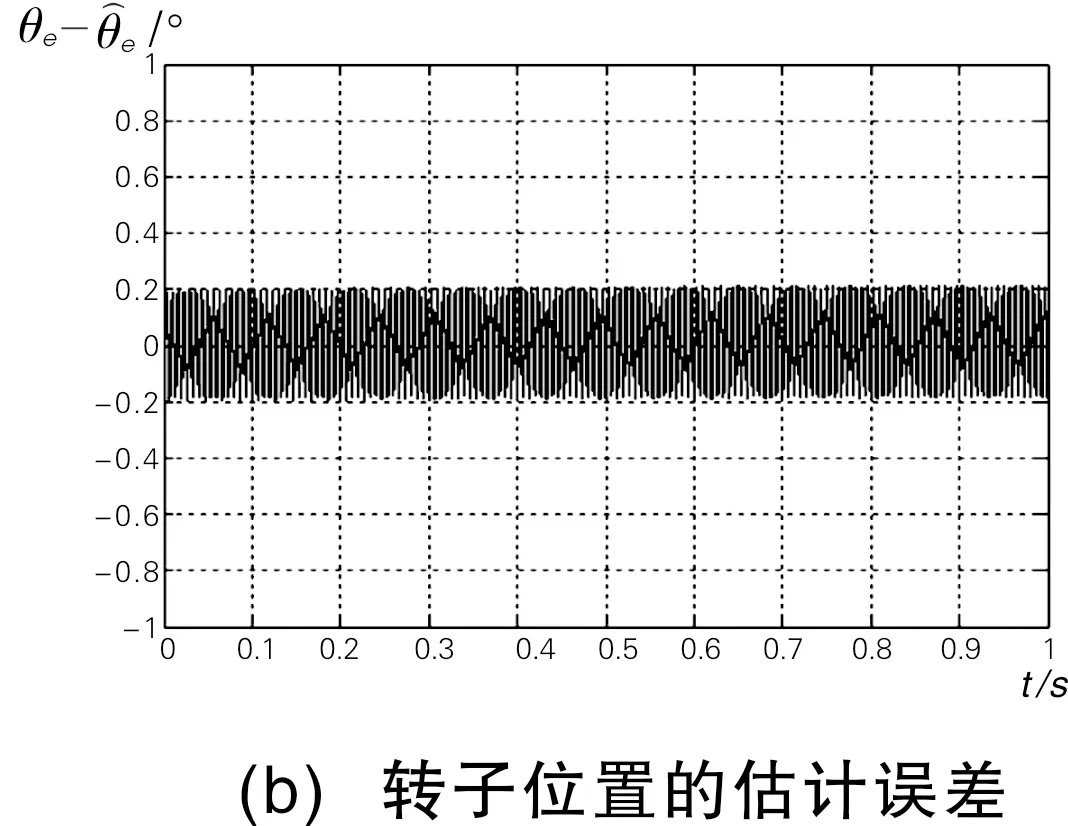
图7 转子速度和位置的估计误差(3 000 r/min)
4 实验
根据上述理论分析,为了更好地验证基于MRAS的转子位置估算方法是否可行,电动车采用永磁无刷直流电机进行实验,控制电路主控制芯片采用DSP芯片TMS320F28335,它是TI公司的一款TMS320C28X系列浮点DSP控制器,具备32位浮点处理单元,有多达18路的PWM输出,与前代DSC相比,平均性能提升50%,并与定点C28X控制器软件兼容,且具有精度高、成本低、功耗小、性能高、外设集成度高等优点,带有CAN控制器,资源丰富。控制器如图8所示,电机测试设备如图9所示。
实验样机转速稳定在3 000 r/min时,电机转子位置和转速的估算值和实测值对比分别如图10(a)、(b)所示。由图10可见转子位置的跟踪精度高,转速的估算值与实测值误差小。

图8 控制器

图9 电机测试设备
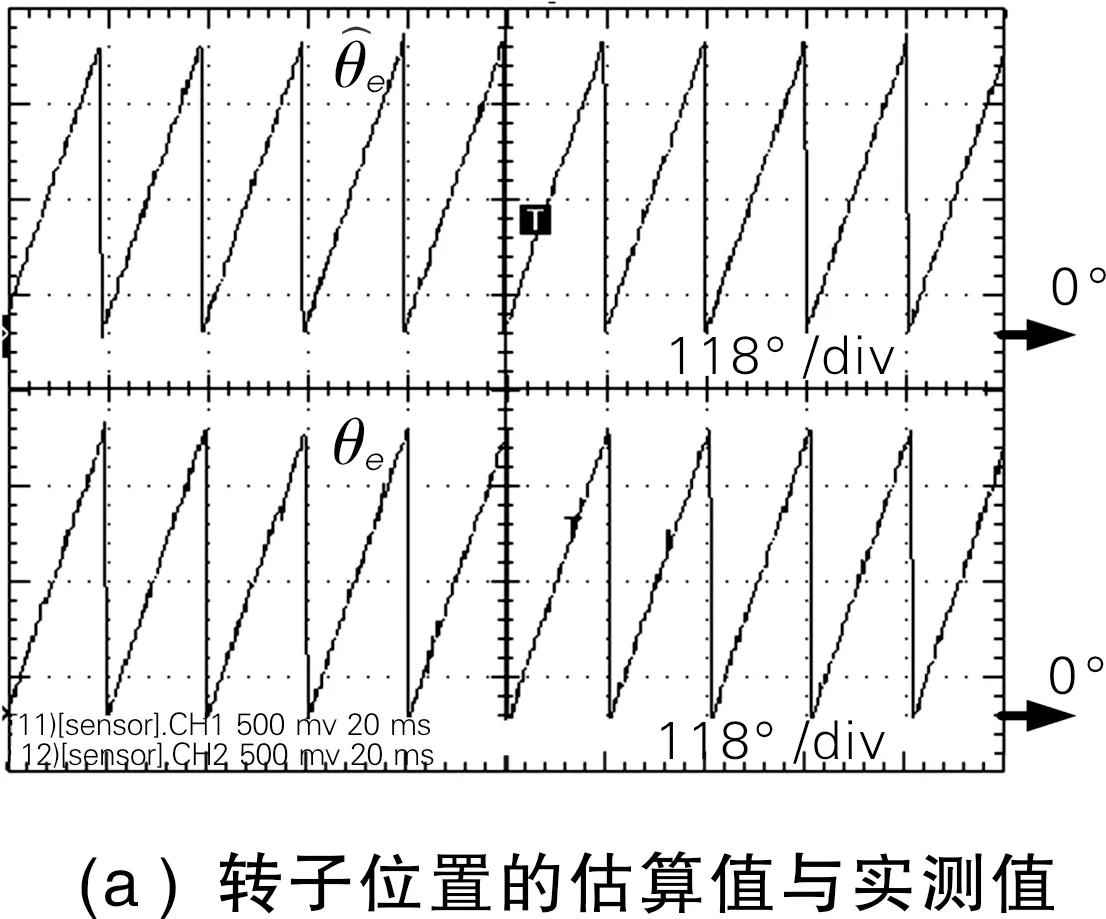

图10 估算值与实测值(3 000 r/min)
5 结束语
综上所述,电动车用永磁无刷直流电机正弦波控制的基于MRAS的无位置传感器研究是一种基于稳定性设计的参数辨识方法,其既能保证参数估计的渐进收敛,又对转子位置的观测具有良好的跟踪精度,能够较为准确地检测转子的速度和位置,且对参数变化和负载波动影响较小,鲁棒性较强,对电动车动力系统的发展有很高的使用价值。
[1] 纪铁生.无位置传感器永磁无刷直流电机控制策略的研究[D].成都:西南交通大学,2013.
[2] 杜晓芸,林瑞光,吴建华.无位置传感器无刷直流电机的控制策略[J].电机与控制学报,2002,6(1):21-25.
[3] Yang J,Zhao J,Qin C,et al.Model reference adaptive sensorless control for surface permanent magnet synchronous machine under severe starting conditions[C].International Power Electronics and Motion Control Conference,2004,2:1018-1022.
[4] 汪立伟.电动车用永磁无刷直流电机正弦波控制的研究[D].锦州:辽宁工业大学,2015.
[5] 王会明,丁学明.无刷直流电机正弦波控制及其在电动自行车中的应用[J].测控技术,2013,32(7):74-78.
[6] 林平,胡长生,李明峰,等.基于模型参考自适应系统算法的速度估算核的研制[J].中国电机工程学报,2004,24(1):118-123.
(责任编辑 吴鸿霞)
Research on Position Sensorless Control of Permanent Magnet Brushless Motor for Electric Vehicle
MaGuifang,LiuShengjian
(School of Mechanical and Electronic Engineering,Longyan University,Longyan Fujian 364012)
For a series of shortcomings brought by position sensor of permanent magnet brushless DC motor for the traditional electric vehicles,based on model reference adaptive principle,the mathematical model of model reference adaptive method of sinusoidal permanent magnet brushless DC motor was established.In Matlab/Simulink environment the position sensorless operation simulation system was constructed and simulation research was done for position sensorless.The results of the simulation and experiment showed that model reference adaptive method can detect accurately the rotor position signal,basically meeting the needs of the permanent magnet brushless DC motor operation requirements for electric vehicles.
electromotive motorcycle;brushless DC motor;MRAS;position sensorless
2016-04-25
龙岩学院百名青年教师攀登项目(项目编号:LYXY2011078)。
马桂芳,讲师,硕士。
10.3969/j.issn.2095-4565.2017.01.004
TM306
A
2095-4565(2017)01-0011-05
