基于三维点云数据的苹果树冠层几何参数获取
2017-03-04郭彩玲
郭彩玲,宗 泽,张 雪,刘 刚
基于三维点云数据的苹果树冠层几何参数获取
郭彩玲1,2,宗 泽1,张 雪1,刘 刚1※
(1. 现代精细农业系统集成研究教育部重点实验室,农业部农业信息获取技术重点实验室,中国农业大学,北京100083;2. 唐山学院机电工程系,唐山063000)
针对果园环境下苹果树冠层参数获取精度较低的问题,提出了基于地面三维激光扫描仪高精度获取苹果树冠层参数的方法。选用Trimble TX8地面三维激光扫描仪作为苹果树冠层三维点云数据采集设备,提出了基于标靶球的KD-trees-ICP算法,用于高精度配准苹果树冠层三维点云数据。研究了平均风速小于4.5 m/s时,距离地面三维激光扫描仪不同远近条件下的标靶球配准残差和拟合误差的变化规律,分析结果表明,标靶球平均配准残差为1.3 mm,平均拟合误差为0.95 mm,低于大场景测量配准误差要求(5 mm)。为了提高有风环境下提取苹果树冠层参数的精度,研究了0.9~4.5 m/s区间平均风速影响下的苹果树冠层枝干、果实、叶片的三维点云质量,建立了风速与叶片侧面厚度的曲线拟合模型,分析结果表明,在果园平均风速小于1.6 m/s时可以从苹果树冠层三维点云数据中提取高精度冠层参数。利用地面激光三维扫描仪获取距离苹果树12 000 mm以内冠层参数,测量精度高于人工测量,相对误差小于4%,为果树高通量信息获取提供了技术支持。
测量误差;激光扫描仪;精度;苹果树冠层;三维点云数据
0 引 言
果树冠层形状、结构、体积[1]和叶面积指数、生物量估算[2]与植物生物力学建模[3]有密切的关系,是研究果树表型的基础,同时精准测量冠层结构和形态参数也为研究果树精准喷药[4]、冠层光照分布[5-6]、果品质量研究[7]和自动化收获[8]等提供技术支持。传统的手工测量方法依靠人工经验,获取实地数据,再将调查结果外推到管理尺度作为依据加以应用[9],这种测量和研究方法在过去相当长的时间内发挥了较大作用。随着精细农业的发展,传统的手工测量方法在果树冠层参数快速精确测量方面逐渐呈现出局限性。
激光测量技术在林木冠层参数测量中的应用,尤其用于树木和作物的无损检测,和传统的伐倒检测、人工测量方法相比较,较大的减少了木材的损耗和人力物力的消耗,提高了测量速度。激光测量技术在作物冠层参数测量中的应用主要有,一是大尺度获取作物冠层三维信息,提取诸如森林树木冠层高度[10],篱壁式苹果园苹果树株高[11-12]、冠层三维结构形态[13]、冠层三维轮廓和树冠体积[14]、群体冠层结构[15]、树木枝干形态[16]等,这些研究都是在大尺度上,对冠层三维结构进行的研究。二是针对果树冠层内部器官形态的研究,如花序三维形态结构[17]和植物叶片三维形态[18-21],这些均在实验室环境中植物器官形态参数,取得了一定的研究成果。但在果园自然条件下精准获取果树冠层参数方法还需要进一步研究。
本研究以果园环境下生长的苹果树冠层作为研究对象,选用地面三维激光扫描仪快速获取果树冠层三维点云数据,提出一种准确配准三维点云的方法,定量分析不同风速影响下苹果树冠层三维点云质量,提取苹果树冠层高精度参数,与人工测量结果进行对比分析。研究结果可为枝叶间异速生长检测、冠层光照时空分布等提供技术支持。
1 材料与方法
1.1 试验方法
由于被扫描目标之间相互遮挡,在地面三维激光扫描仪获取三维数据时,只根据一站点云无法获取目标完整的三维信息,因此扫描时需要地面三维激光扫描仪围绕扫描目标物进行多站扫描,获取目标物不同部位的三维点云数据。
图1描述了获取单株苹果树冠层三维点云数据的试验方法。地面三维激光扫描仪位于距离最近树干中心3.5~5 m的区域,图中采用了5站式扫描。为了能够将5站扫描得到的三维点云数据配准在一起,采用标直径为100 mm靶球作为配准基准。针对多站数据配准时出现累计误差问题[22],考虑到果树冠层的尺寸,将标靶球布置于苹果树冠层周围,距地面三维激光扫描仪1~12 m区域内,保证每站均可以扫描到4个以上标靶球,并且至少3个标靶球要落在扫描的重叠区域,利用KD-tree- ICP和标靶球辅助配准的方法配准点云,并提取冠层参数,通过定量分析不同距离标靶球的拟合误差、不同风速下叶片点云的分层情况,提出果园环境下苹果树冠层参数精准获取的方法。
1.2 仪器与材料
地面三维激光扫描仪按测距原理可分为:基于脉冲型、基于相位差型和基于光学三角测量型3种。前2种适用于远距离测量,后者可以近距离获取比较精确的三维点云数据。
三维点云数据通常包含有扫描物体的三维坐标信息、强度信息,部分会带有RGB颜色信息(例如trimble TX5)。为了实现无损、快速获取苹果树冠层的三维点云数据,试验采用美国Trimble公司地面三维激光扫描仪TX8进行苹果树冠层三维点云数据采集(见图2)。最大扫描范围为340 m,测量速度为1 000 000点/s,视场角为360º×317º,精度为0.5",扫描范围为±10¢,采用脉冲激光测距,测量精度不小于0.5″。100 m测距时,误差≤2 mm。

a. 三维激光扫描仪Trimble TX8 b. 戴维斯气象站DAVIS6162
在已建立的中国农业大学苹果树采摘机器人试验基地(北京市昌平区南口镇辛力庄村)内,开展基于地面三维激光扫描仪的苹果树冠层参数获取研究工作。苹果树株距2.5 m,行距5 m,树高3.2~5.1 m,行间生草,灌水条件良好,采用常规管理方式进行春季修剪。本文数据采集对象为随机选择果园自然生长状态下树龄7 a的自由纺锤形宫藤富士苹果树。利用地面三维激光扫描仪获取苹果树不同风速、不同生长阶段的三维点云数据。2015年5月—2016年5月期间,对果园苹果树冠层进行了7次数据采集,初步分析可知,果园现场环境影响三维点云质量。本试验不考虑扫描环境诸如温湿度、大气压、光照度等参数,仅分析风速对影响扫描参数的影响。风速数据由距离扫描目标树木距离25 m的DAVIS 6162提供。
1.3 点云配准方法
为了保证点云的配准精度,按照图1试验方法,扫描之前进行仪器调平,即仪器垂直于地面放置。获取的苹果树冠层三维点云数据如图3所示,图3c中绿色框表示扫描目标苹果树冠层,黄色三角是地面三维激光扫描仪的工作位置,称之为站,每站获取的三维点云数据如图3 a、b、d、e、f所示,图3 c是配准后的三维点云数据。

图3 三维点云数据配准过程
不同站的点云转换到同一坐标系下,称之为三维点云的配准。ICP(iterated closest points)算法[23-24]是配准精度较高的算法,适合于配准刚体的点云数据,通过搜索紧邻点间的对应关系,利用坐标变换可实现坐标匹配工作。利用ICP算法配准多站三维点云数据时,耗时较长。近几年的研究中,科研人员根据不同适用场合的三维点云数据,研究了ICP的改进算法[25-27],试图提高配准效率。本文进行多站三维点云数据配准时不考虑扫描形变,即认为扫描中苹果树冠层各个器官为刚体,扫描过程中形态不发生变化。提出KD-tree-ICP算法[28]结合标靶球配准的方法,提高三维点云数据配准精度。算法流程图如图4所示。
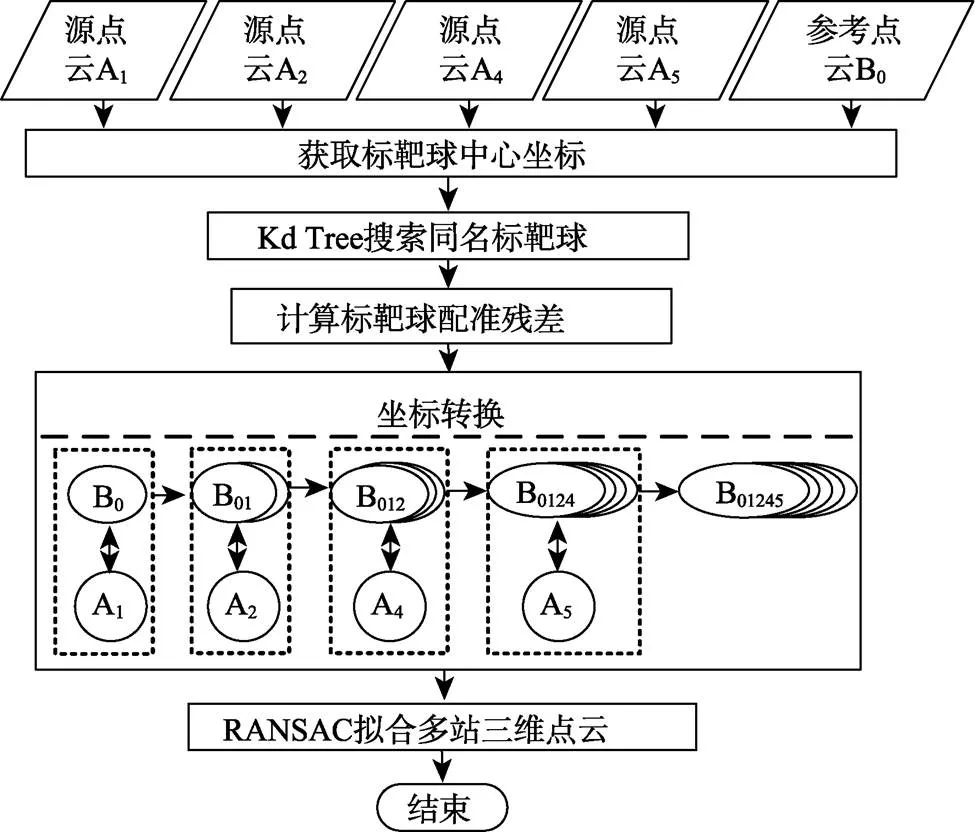
图4 算法流程图
在提取标靶球点云时,需要在图3每站点云数据中,选出标靶球点云并手工去除异常点,提高标靶球球心的定位精度。任选一站三维点云数据作为参考点云,例如选取第3站三维点云数据做为参考点云(图3中记为0),其他站三维点云数据为源点云。设扫描得到标靶球点云坐标为(,球心坐标为(),球面半径为0,按照公式(1)计算标靶球球心,
式中为旋转矩阵,分别表示沿着轴的旋转角,为平移矩阵,表示沿着轴的位移量。
以标靶球球心坐标为基础,用KD-Tree在各站中搜索同名标靶球,利用公式(2)将各站源点云转换到目标点云坐标下。为了减小累计误差,配准时,每站标靶球单独参与配准。即,源点云1和参考点云0配准,得到01,然后源点云1与配准好的点云01配准,得到02,以此类推,直到所有的源点云配准完毕。
1.4 点云配准分析
为了分析苹果树冠层扫描点云数据的质量,考虑到树干和果实的不规则性,利用误差函数加速寻找同名点的最小欧氏距离,作为标靶球配准残差[29],如图5所示。标靶球拟合误差是表征枝干和果实的配准质量的另一个重要参数,表示扫描获得的目标物三维点云的形变程度。按照随机抽样一致法RANSAC(RANdom Sample Consensus)[30],拟合多站标靶球三维点云数据后的拟合误差。可以看出,在果园自然环境下,平均风速在0.9~4.5m/s时,标靶球到地面三维激光扫描仪距离1 000~ 12 000 mm时,平均配准残差为1.3 mm,个别残差点位于4.5~5 mm之间。分析产生的原因为果园自然环境中含有了灰尘或者飞虫的扫描点,对配准残差产生了影响。平均拟合误差为0.95 mm,最大拟合误差小于3 mm。配准残差和拟合误差均低于大场景测量配准误差要求(5 mm)[31]。标靶球的拟合误差变化说明,在果园自然环境下扫描时,苹果树冠层枝干和果实被视为具有刚体特性的目标物,受外界环境变化较小,在配准好的三维点云数据中,不同站点云重叠部分分布均匀。
2 结果与分析
苹果树冠层结构中含有枝干、果实、叶片等植物器官,其中枝干和果实具有刚体特性,叶片因自身柔软易发生变形,不具有刚体特性。为了实现扫描后三维点云数据的快速精确配准,在数据配准中不区分扫描目标物是否具备刚体特性。有风果园环境中扫描时,苹果树冠层叶片在扫描的瞬间会发生形态变化,获取叶片的三维点云数据出现失真现象。叶片因自身材料特性使得地面三维激光扫描获取的不同站三维点云数据不重叠的现象称为分层现象。出现分层的叶片三维点云数据空间分布比实际叶片大,且不均匀,边缘轮廓清晰程度不同。图6和图7列出了苹果树冠层的三维点云数据、部分枝干三维点云数据、叶片三维点云数据,分析了不同风速影响下,地面三维激光扫描仪获取的苹果树冠层参数的不同质量。
2.1 风速与枝干、果实点云质量关系分析
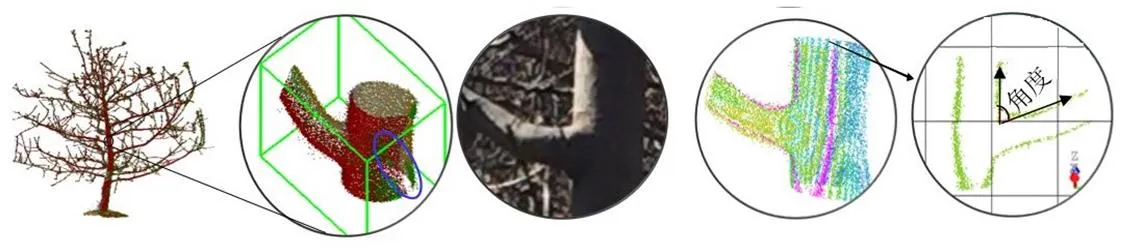
图6是平均风速4.5 m/s时,部分枝干三维点云数据配准后的图像,棕色和绿色分别表示不同站扫描时获取的三维点云,棕色和绿色交接处出现了棕色和绿色三维点云交叉现象,即为两站配准时重叠部分的三维点云数据,图像中交叉分布均匀,配准后的点云数据树干外形轮廓清晰。
其中图6中为0.9、1.2、4.5 m/s 3种不同平均风速环境中获取的苹果树冠层三维点云数据,整体冠层数据比较清晰,冠层枝条、叶片、果实清晰可辨,点云密集。可以用人工交互方法精确地提取树干高度、冠层高度、胸径、枝干夹角、果径几何参数信息。

a. 风速Wind speed 0.9 m·s-1
b. 风速Wind speed 1.2 m·s-1
c. 风速Wind speed 4.5 m·s-1
注:从左到右:整体冠层、部分枝干、彩色信息、点云切片、参数提取
Note: From left to right: whole canopy, piece of branch, color data, point cloud slice, parameter extraction
图6 苹果树冠层三维点云数据
Fig. 6 3D point cloud data of apple tree canopy
2.2 风速与叶片点云质量关系分析
图7是在不同风速下苹果树冠层部分叶片三维点云数据。表中可以看出,平均风速为0、0.9、1.1、1.9、2.4 m/s时,测量叶片侧面三维点云数据分布宽度,作为地面三维激光扫描仪扫描的叶片侧面厚度值,分别为0.9、5.5、9.8、14.5、35.8 mm。叶片侧面厚度的不同反应了地面三维激光扫描仪获取的叶片三维点云的分层程度。
从图7可以看出,在平均风速为0的测量环境下,叶片侧面的三维点云厚度为0.9 mm,三维点云数据分布均匀,生成三角网格大小均匀[32]。平均风速在0.9~2.4 m/s之间变化时,叶片侧面的三维点云厚度变化区间为5.5~35.8 mm。平均风速为0.9 m/s,配准后的叶片三维点云分布比较均匀,表现在点云图像中不同颜色的点云(不同站点云颜色不同)分布比较均匀,配准的多站三维点云之间没有出现分层现象。叶片侧面厚度为5.5 mm,比实际叶片厚度值大,可以清晰分辨出叶片边缘、尖端轮廓,原始点云生成的Delaunay三角网格比较均匀,没有狭长的三角形,易于提取叶片表型参数。平均风速1.1 m/s时,叶片开始出现不同程度的分层现象,平均风速1.9 m/s时的分层厚度为14.5 mm,叶片边缘比较清晰,但是生成Delaunay三角网格时,出现了狭长三角形现象,不利于叶片表面信息提取。平均风速2.4 m/s时,三维点云数据从叶片侧面看,叶片分层现象更为明显,从叶片正面看,单站三维点云数据轮廓不清晰,多站三维点云数据配准后没有出现不同站点云重叠现象,生成的Delaunay三角网格没有规律,不能提叶片边缘轮廓等。
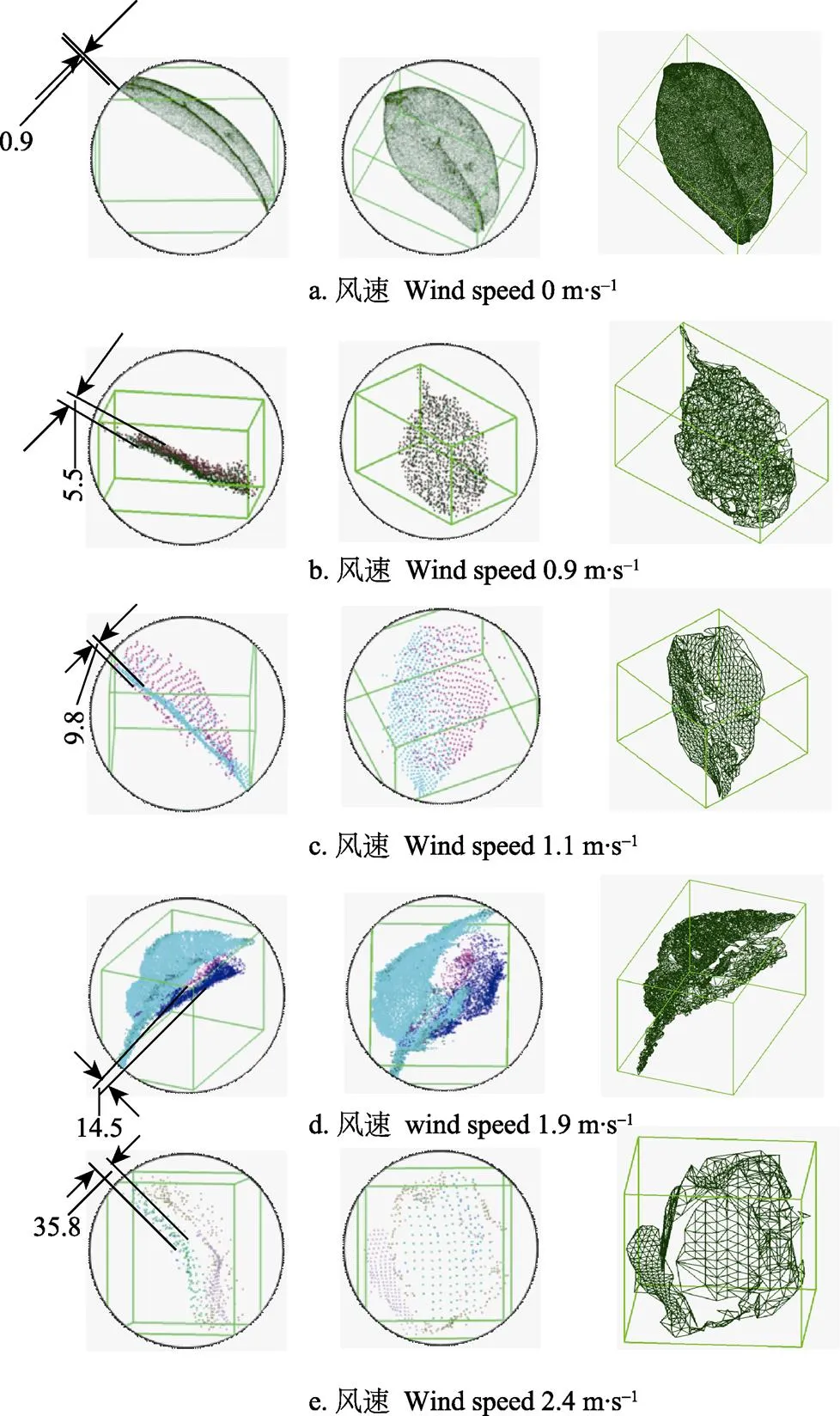
注:从左到右:叶片侧面厚度、叶片正面、三角网络。
在相同风速下,地面三维激光扫描仪获取的叶片三维点云数据的叶片侧面厚度值是不同的,一方面可能是由测量误差引起的,另一方面的主要可能是不同站扫描时,瞬间风速变化导致的。后者可以考虑采用多扫描仪协同扫描以减少风速不均匀造成的叶片分层影响。
为了分析有风的天气对果树冠层叶片三维点云数据质量的影响程度,在不同风速大小的天气情况下扫描果树冠层,提取三维点云数据中距离地面三维激光扫描仪不同距离的中等大小的叶片80枚,分析叶片三维点云数据不同风速影响下,叶片的分层情况。采用曲线拟合方法,建立风速与叶片侧面厚度之间的曲线估计模型如图8所示。
从图8可以看出,平均风速与叶片侧面厚度的Quadratic曲线拟合模型、Cubic曲线拟合模型、Exponential曲线拟合模型的决定系数分别为0.976、0.986和0.983,<0.001,说明3种曲线具有较好的拟合效果。
从Exponential曲线拟合模型可以看出,叶片侧面厚度随着风速的增大而增大,Quadratic曲线拟合模型、Cubic曲线拟合模型分别在平均风速1.22、1.20 m/s时,叶片侧面厚度出现最小值,在1.6 m/s时,叶片厚度出现急速增大的趋势。平均风速在1.6 m/s以下时,果园环境下获得的三维点云数据可以获取叶片边缘轮廓和表型参数。
在果园环境下,采用地面三维激光扫描仪采集苹果树冠层三维点云数据,除了受到风速的影响之外,还有温度、光照条件、风力、气压、空气质量等因素。另外,苹果树冠层包含的枝干、叶片、果实等材质不同,使得实体本身反射特征不均匀,导致最终获取的三维点云数据包含有错点和漏点,在点云质量上表现为枝干或者叶片等出现点云空洞,如图6蓝色圆所示。
2.3 测量精度分析
表2是2016年4月份新稍生长监测中测试的部分数据(风速1.4 m/s),苹果树冠层同一个参数取采用人工测量方法和三维点云数据测量方法均测量3次取平均值,对比2种苹果树冠层参数测量方法,以对比值,即人工测量值为标准,测量精度高于人工测量,相对误差小于4%。
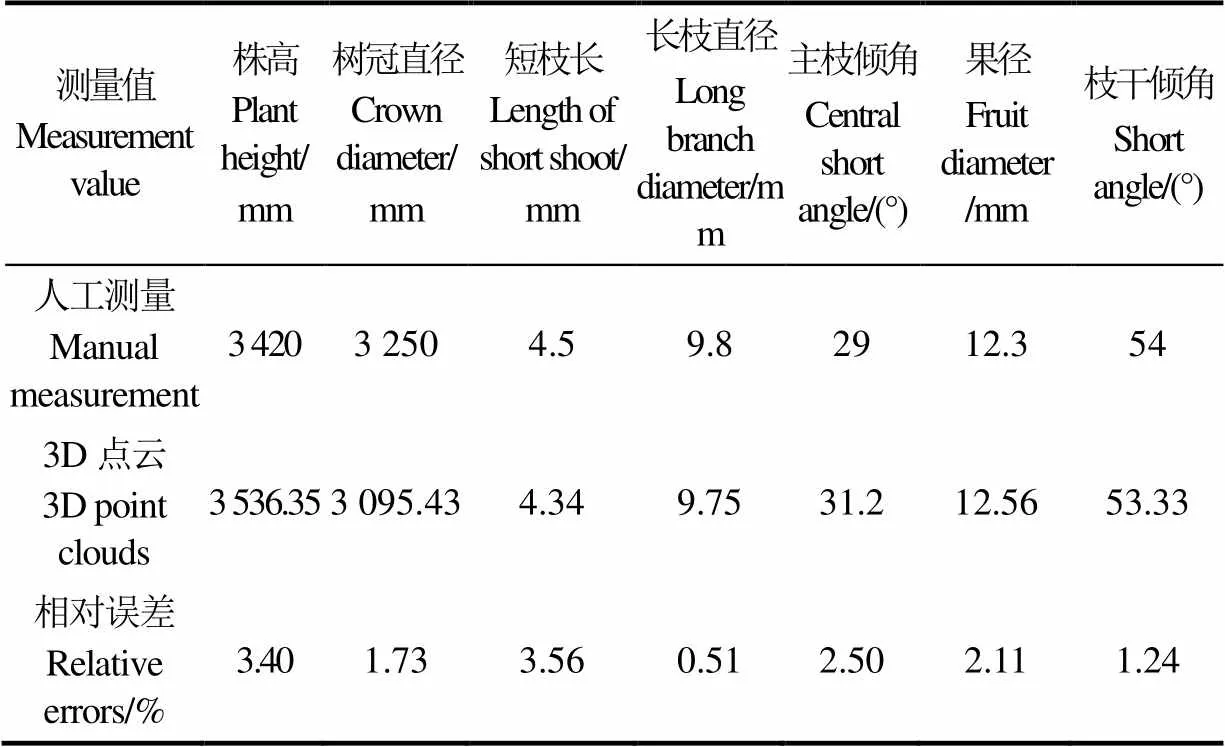
表2 人工和三维点云测量参数的结果对比
注:风速为1.4 m·s-1。
Note: The wind speed was 1.4 m·s-1.
3 结 论
1)提出了利用以地面三维激光扫描仪为采集设备的果树冠层三维点云数据精准获取方法。
2)以果园自然环境成长的苹果树冠层为研究对象,提出了1种基于标靶球的KD-trees-ICP算法,每站标靶球单独参与配准。利用提出的算法,在后续试验中得到较好的三维点云配准效果。果园环境下的苹果树冠层扫描试验表明,平均风速在0.9~4.5 m/s时,标靶球距离地面三维激光扫描仪为1 000~12 000 mm时,平均配准残差为1.3 mm,个别残差点位于4.5~5 mm之间,平均拟合误差为0.95 mm,最大拟合误差小于3 mm,均小于大场景测量误差要求的5 mm。
3)通过风速对苹果树冠层三维点云影响分层试验,结果表明,冠层中的枝干和果实在平均风速4.5 m/s时,扫描的三维点云数据没有受到影响,苹果树冠层三维点云中的叶片出现了不同程度的分层现象,平均风速越大分层现象越明显,平均风速小于1.6 m/s时,叶片分层对叶片轮廓和表型参数提取影响不大。果园环境下,平均风速小于1.6 m/s时可以从苹果树冠层三维点云数据中提取高精度冠层参数。同时与人工测量相比,利用地面激光三维扫描仪获取12 000 mm以内苹果树冠层参数结果,相对误差小于4%。
[1] Miranda-Fuentes A, Llorens J, Gamarra-Diezma J L, et al. Towards an optimized method of olive tree crown volume measurement[J]. Sensors, 2015, 15(2): 3671-3687.
[2] Lichstein J W, Dushoff J, Ogle K, et al. Unlocking the forest inventory data: Relating individual tree performance to unmeasured environmental factors[J]. Ecol Appl, 2010, 20, 684-699.
[3] Vos J, Marcelis L F M, De Visser P H B, et al. Functional- structural plant modelling in crop production[C]. Springer Publishing Company, Incorporated, 2007: vii-viii(2).
[4] Piboule A, Collet C, Frochot H, et al. Reconstructing crown shape from stem diameter and tree position to supply light models. I. Algorithms and comparison of light simulations[J]. Annals of Forest Science, 2005, 62(7): 645-657.
[5] 董天阳,张萃,范菁,等. 植物共享光照资源的生长模型改进及可视化仿真[J]. 农业工程学报,2012,28(16):145-152. Dong Tianyang, Zhang Cui, Fan Jing, et al. Growth model improvement and visual simulation of plants sharing light resource[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(16): 145-152. (in Chinese with English abstract)
[6] Chen Y, Zhu H, Ozkan H E, et al. Spray drift and off-target loss reductions with a precision air-assisted sprayer[J]. Transactions of the ASABE, 2013, 56(6): 1273-1281.
[7] 苏渤海,范崇辉,李国栋,等. 红富士苹果改形过程中不同树形光照分布及其对产量品质的影响[J]. 西北农林科技大学学报: 自然科学版,2008,36(1):158-162. Su Bohai, Fan Conghui, Li Guodong, et al. Effects of modifying between light distribution, yield and quality of different shapes on "Red Fuji" apple[J]. Journal of Northwest A&F University: Natural science, 2008, 36(1): 158-162. (in Chinese with English abstract)
[8] Tong J, Zhang Q, Karkee M, et al. Understanding the dynamics of hand picking patterns of fresh market apples[C]. American Society of Agricultural and Biological Engineers, 2014 Montreal, Quebec Canada, 2014.
[9] 买买提艾沙江,木米尼阿布都外力,王晶晶,等. 富士苹果短截,拉枝对当年生新梢叶片光合特性的影响[J]. 中国农业大学学报,2013 (6):126-131. Aishajiang M, Abuduwaili M, Wang Jingjing, et al. Effects of cutting back and branch-bending on photosynthetic characteristics of new shoots[J]. Journal of China Agricultural University, 2013, 6: 018. (in Chinese with English abstract)
[10] Khosravipour A, Skidmore A K, Wang T, et al. Effect of slope on treetop detection using a LiDAR canopy height model[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 104: 44-52.
[11] Bargoti S, Underwood J P, Nieto J I, et al. A pipeline for trunk detection in trelliss tructured apple orchards[J]. Journal of Field Robotics, 2015, 32(8): 1075-1094.
[12] Strîmbu V F, Strîmbu B M. A graph-based segmentation algorithm for tree crown extraction using airborne LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 104: 30-43.
[13] Miranda-Fuentes A, Llorens J, Gamarra-Diezma J L, et al. Towards an optimized method of olive tree crown volume measurement[J]. Sensors, 2015, 15(2): 3671-3687.
[14] 刘芳,冯仲科,杨立岩,等. 基于三维激光点云数据的树冠体积估算研究[J]. 农业机械学报,2016,47(3):328-334. Liu Fang, Feng Zhongke, Yang Liyan, et al. Estimation of tree crown volume based on 3D laser point clouds data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 328-334. (in Chinese with English abstract)
[15] Leeuwen M V, Nicholas C C, Thomas H, Michael A W, et al. Automated reconstruction of tree and canopy structure for modeling the internal canopy radiation regime[J]. Remote Sensing of Environment, 2013, 136: 286-300.
[16] Schneider F D, Leiterer R, Morsdorf F, et al. Simulating imaging spectrometer data: 3D forest modeling based on LiDAR and in situ data[J]. Remote Sensing of Environment, 2014, 152: 235-250.
[17] 高士增,张怀清,刘闽,等. 基于点云的树木枝干形态参数提取技术[J].东北林业大学学报,2014(4):109-114. Gao Shizeng, Zhang Huaiqing, Liu Min, et al. Morphological parameters extraction of tree branches based on point cloud[J]. Journal of Northeast Forestry University, 2014(4): 109-114. (in Chinese with English abstract)
[18] 苏红波,郭新宇,陆声链,等. 苹果花序几何造型及可视化研究[J]. 中国农学通报,2009(2): 272-276. Su Hongbo, Guo Xinyu, Lu Shenglian, et al. Geometry modelling and visualization of the apple inflorescence[J]. Chinese Agricultural Science Bulletin, 2009(2): 272-276. (in Chinese with English abstract)
[19] 方慧,杜朋朋,胡令潮,等. 基于可视化类库的植株三维形态配准方法及点云可视化[J]. 农业工程学报,2013,29(22):180-188. Fang Hui, Du Pengpeng, Hu Lingchao, et al. VTK-based plant 3D morphological visualization and registration[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(22): 180-188. (in Chinese with English abstract)
[20] 郭浩,朱德海,戈振扬,等. 植物立体可视化模拟系统原型StereoPlants的构建[J]. 农业工程学报,2012,28(15):113-117. Guo Hao, Zhu Dehai, Ge Zhenyang, et al. Construction of plant stereo visualization simulation system prototype: Stereo plants[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(15): 113-117. (in Chinese with English abstract)
[21] 赵春江,陆生链,郭新宇,等. 数字植物研究进展:植物形态结构三维数字化[J]. 中国农业科学,2015,48(17):3415-3428. Zhao Chunjiang, Lu Shenglian, Guo Xinyu, et al. Advances in research of digital plant: 3D digitization of plant morphological structure[J]. Scientia Agricultura Sinica, 2015, 48(17): 3415-3428. (in Chinese with English abstract)
[22] 程效军,施贵刚,王峰,等.点云配准误差传播规律的研究[J]. 同济大学学报:自然科学版,2009,37(12):1668-1672. Cheng Xiaojun, Shi Guigang, Wang Feng, et al. Research on point cloud registration error propagation[J].Journal of Tongji University: Natural Science, 2009, 37(12): 1668-1672. (in Chinese with English abstract)
[23] Besl P J, McKay N D. Method for registration of 3-D shapes[C]// International Society for Optics and Photonics : Robotics-DL tentative, 1992: 586-606.
[24] Chen Y, Medioni G. Object modelling by registration of multiple range images[J]. Image and Vision Computing, 1992, 10(3): 145-155.
[25] Vo A V, Truong-Hong L, Laefer D F, et al. Octree-based region growing for point cloud segmentation[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 104: 88-100.
[26] Phillips J M, Liu R, Tomasi C. Outlier robust ICP for minimizing fractional RMSD[C]// IEEE Computer Society: International Conference on 3-D Digital Imaging and Modeling, 2007:427-434..
[27] 孙军华,谢萍,刘震,等. 基于分层块状全局搜索的三维点云自动配准[J]. 光学精密工程,2013(1):174-180. Sun Junhua, Xie Ping, Liu Zhen, et al. Automatic 3 D point cloud registration based on hierarchical block global search[J]. Optic and Precision Engineer, 2013, 21(1): 174-180. (in Chinese with English abstract)
[28] Greenspan M, Yurick M. Approximate kd tree search for efficient ICP[C]//International Conference on 3-D Digital Imaging and Modeling, 2003. 3dim 2003. 2003: 442-448.
[29] Rusu R B, Marton Z C, Blodow N, et al. Towards 3D Point cloud based object maps for household environments[J]. Robotics & Autonomous Systems, 2008, 56(11): 927-941.
[30] 康志忠,王薇薇,李珍. 多源数据融合的三维点云特征面分割和拟合一体化方法[J]. 武汉大学学报:信息科学版,2013(11):1317-1321,1382. Kang Zhizhong, Wang Weiwei, Li Zhen. An Integrative Method of 3D Point Clouds Feature Segmentation and Fitting Fusing Multiple Data Sources[J]. Geomatics and Information Science of Wuhan University, 2013(11): 014. (in Chinese with English abstract)
[31] 尹若捷,杨冲,付正文.多激光扫描仪的大场景联合配准及 精度评估[J]. 测绘地理信息,2015(3):13-17. Yin Ruojie, Yang Chong, Fu Zhengwen. Overall control and registration precision analysis of large-scale terrain with multiple laser scanners[J]. Journal of Geomatics, 2015(3): 13-17. (in Chinese with English abstract)
[32] Hou T, Zheng B, Xu Z, et al. Simplification of leaf surfaces from scanned data: Effects of two algorithms on leaf morphology[J]. Computers and Electronics in Agriculture, 2016, 121: 393-403.
Apple tree canopy geometric parameters acquirement based on 3D point clouds
Guo Cailing1,2, Zong Ze1, Zhang Xue1, Liu Gang1※
(1.100083,;2.063000,)
Accurate structural parameters and crown characterization of large isolated apple trees were vital for adjusting spray doses, trimming, autonomous harvesting. According to previous research, canopy measurement methods to characteristic the whole tree structure could be classified in two groups: Manual measurements and electronic procedures to estimate tree dimensions. These methods were time consuming and required specialist knowledge, so a simpler crown characterization measurement method was required. Terrestrial laser scanning (TLS) could provide accurate canopy information through non-destructive methods, which filled the gap between tree scale manual measurements and large scale LiDAR measurements. Laser scanning delivers a dense cloud of points, and this raw point data were filtered for deriving a digital terrain model and subsequent fitting of a parametric stem model. In this study, Trimble TX8 had been used to getting point clouds of the apple tree canopy with trees height 3.2-5.1 m and 7 years old, in the orchard environment. A method and registration algorithm for reconstructing the three-dimensional (3D) apple tree canopy based on terrestrial laser scanner point cloud data from apple trees was presented. After an initial alignment had been obtained from this last set of correspondences, the object ball point clouds were extracted, and the noise was deleted by hands. In order to improve convergence speed, KD-tree improved ICP(iterated closest points), and combined with object ball, to estimate the optimal transform. The object residual errors and fitting errors at different distances between object and scanner were analyzed. Results showed that, the average residual errors was 1.3 mm, and the average fitting errors was 0.95 mm at the distance from 1 000 to 13 000 mm. All the errors were less than the traditional registration accuracy 5 mm. In addition, wind as an importance factor always influenced point clouds quality. In order to find the influence between them, several pieces of branches, apples and 80 pieces of leaves had been extracted in the wind speed from 0.9 to 4.5 m/s. And the branches and apple structures, the leaf characteristics were studied under different wind speed. Results showed that, the branches and apple outline clearly, both the single tree and group trees, the geometric parameters, such as apple diameter, stem diameter, trunk detection, canopy height, canopy diameter, planting distance, line spacing, could been extracted easily even if the average wind speed was 4.5m/s in the scanning instant. Great changes had taken place in the leaves edge and thickness, when the wind speed changed from 0.9 to 2.4 m/s. The thickness of the leaf profile had changed from 2.2 to about 35.8 mm, and the original point clouds Delaunay triangular mesh also became irregular. And long and narrow triangle appeared at the moment of the average wind speed 1.9 m/s. The three leaf thickness fitting curves, as quadratic curve, cubic curve and exponential curve, were in good agreements for the whole range of studied volumes (2=0.976,2=0.986 and2= 0.983,< 0.001). The fitting curve showed that, apple canopy 3D point cloud data could be obtained with good quality in orchard environment. Comparing with the traditional manual measurement, the relative errors of the canopy parameter measurement values obtained from 3D point clouds data were less than 4%.
measurement errors; lasers; accuracy; apple canopy; point cloud
10.11975/j.issn.1002-6819.2017.03.024
F762.5;P225
A
1002-6819(2017)-03-0175-07
2016-06-16
2016-12-29
国家自然科学基金资助项目(31371532)
郭彩玲,女,河北石家庄人,副教授,博士生,主要从事自动化与信息化技术研究;北京中国农业大学,100083;唐山唐山学院,063000。Email:gcl@cau.edu.cn
刘 刚,男,河北保定人,教授,博士生导师,主要从事电子信息技术在农业中的应用研究;北京中国农业大学,100083。 Email:pac@cau.edu.cn
郭彩玲,宗 泽,张 雪,刘 刚.基于三维点云数据的苹果树冠层几何参数获取[J]. 农业工程学报,2017,33(3):175-181. doi:10.11975/j.issn.1002-6819.2017.03.024 http://www.tcsae.org
Guo Cailing, Zong Ze, Zhang Xue, Liu Gang.Apple tree canopy geometric parameters acquirement based on 3D point clouds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(3): 175-181. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.03.024 http://www.tcsae.org
