农田信息采集用多旋翼无人机姿态稳定控制系统设计与试验
2017-03-04廖懿华张铁民兰玉彬
廖懿华,张铁民,兰玉彬
农田信息采集用多旋翼无人机姿态稳定控制系统设计与试验
廖懿华1,张铁民1※,兰玉彬2
(1. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642; 2. 国家精准农业航空施药技术国际联合研究中心,广州 510642)
农田信息快速采集是精准农业的基础。为快速、高效、准确、节能获取农田信息,该文搭建了多旋翼无人机平台,设计了以STM32F407为主控制器的多旋翼飞行控制系统。采用了比例积分微分(proportion,integration,differentiation,PID)双闭环控制策略,外环为角度反馈,内环为角速度反馈。通过工程凑试法得到合适的PID控制参数。运用专家控制策略改进上述控制方法,使控制参数适应无人机姿态变化。对所设计的无人机控制系统进行抗干扰和阶跃响应试验。系统在受到30°横滚与俯仰角干扰后,其对应恢复平衡时间均在3.4 s内,航向角30°干扰后恢复时间在4 s内。系统横滚与俯仰角阶跃响应调节时间在1~2 s内,航向角在3.4 s内。试验结果表明:双闭环PID控制策略实现多旋翼无人机姿态稳定控制,专家控制策略增强无人机的抗干扰能力。在室外农田环境中,无人机能根据指令在1~2 s内快速调整姿态。当姿态受风影响发生倾斜时,陀螺仪测量角速度大于3 (°)/s,采用的控制策略能迅速调整电机转速,保持无人机姿态稳定平衡。试验证明该控制系统稳定可控且具有较强抗干扰性,满足多旋翼无人机低空采集农田信息的要求。
无人机;飞行控制系统;姿态控制;飞行试验;PID专家控制器;信息采集
0 引 言
农用无人机主要用于喷施农药、液肥、预警灾害、采集农田信息等,市场潜力巨大。随着家庭农场、土地流转等新型农业经营模式的兴起,给农用无人机发展带来无限机遇[1]。由于中国作物品种多样,农户规模较小,需要在小范围内实现精准农业,采用多旋翼无人机获取地面农田信息可有效解决上述问题[2-4]。多旋翼无人机具有结构简单,操控方便、机动性好、视野广、作业选择性强等特点,能及时获取低空高分辨率图像和其他近地面信息,减少人力物力资源消耗,成为农田信息采集平台之一[5]。近年来,随着无人机遥感监测技术迅速发展,美国已研发适用于农田信息采集的无人机[6]。国内从事农业航空技术的企业已研制出多种机型、不同载荷的适用于超低空获取农田信息的微小型多旋翼无人机平台[7]。虽然国外商用与科研的无人机技术发展较先进,但少有提供技术开发支持。国外有开源项目,但开源项目通用性强,开发程序庞大,对其深入研究需要一定时间和技术支持。国内大型无人机商业公司多在闭源系统上开发核心软件。
多旋翼无人机为欠驱动系统,在农田环境下其飞行稳定性易受自然风、电磁干扰等近地面环境因素影响,其飞行稳定性关系到能否采集符合要求的农田信息。文献[8-13]采用改进的PID控制器以优化控制性能,为四旋翼无人机控制系统的进一步研究提供理论基础。文献[14-16]提出了在四旋翼无人机中尝试专家系统等智能控制算法的建议。文献[17]设计的PID控制器在飞行实验中实现良好的姿态控制效果,并提出改进该控制器以获得更好的控制效果。文献[18]使用双闭环串级PD控制器实现对四旋翼飞行器姿态调整和控制,且抗干扰能力强,需要进一步对系统的阶跃响应和抗干扰能力性能测试。文献[19]设计的智能比例和智能积分控制器可使姿态角快速回复到平衡点,具有更好的动态性能和稳态精度,达到了较为满意的姿态控制效果。文献[20]提出了在植保四轴飞行器应用模糊PID控制算法以实现四轴飞行器的稳定飞行。为此,本研究参考上述文献,运用双闭环PID控制结构,结合专家控制策略实时调整控制策略,让多旋翼控制系统姿态稳定、可控且具有较好的抗干扰能力。并对采用的控制方法进行抗干扰、阶跃响应试验与农田环境飞行试验,以用于低空农田信息采集。
1 多旋翼无人机运动分析
采用导航坐标系(n系)和机体坐标系(b系)描述低空作业的“X”型四旋翼无人机姿态,如图1所示。在导航坐标系中,n轴垂直于水平面且方向向上,n与n互相垂直且在水平面内,n轴指向北,n轴指向东[21-22]。机体坐标系以机体中心为原点,原点至1、4号旋翼夹角中心线为b轴,原点至1、2号旋翼夹角中心线为b轴,b轴垂直向上。姿态测算系统中的陀螺仪、加速度计,磁强计均以机体坐标系输出测量值。定义多旋翼的横滚角是b轴与地平面的夹角,(°);俯仰角是b轴与地平面的夹角,(°);偏航角是绕b轴旋转的角度,(°),顺时针为正方向。
多旋翼的横滚运动指机身绕n轴转动,水平方向合力沿n方向。同时增加或减小旋翼1、4的转速,并等量减小或增加旋翼2、3的转速,两组旋翼的拉力差实现无人机横滚运动。俯仰运动与横滚运动类似,旋翼1、2和旋翼3、4两组旋翼的拉力差实现俯仰运动。偏航运动是指机身绕n轴转动,当旋翼1、3转速增加或减少,同时旋翼2、4转速减少或增加时,产生不平衡的反扭力矩实现偏航运动。
2 多旋翼无人机平台构建
采集农田信息平台为搭载小型电荷耦合元件(charge- coupled device,CCD)摄像头的微小型多旋翼。选用轴距为330 mm四轴机架,质量为1.45×10-4kg。机架中心板采用玻纤,机臂采用塑料,具有耐摔耐用特点。为了避免无人机对农田作业环境造成污染,采用放电倍率大、重量轻的锂电池作动力。选用电池容量为2 200 mA·h,放电倍率为20 C的3节串联锂电池,输出最大持续电流 44 A,电压11.1 V。
电子调速器简称电调,用于把输入的直流电转换为三相交流电驱动无刷电机,并根据控制信号实现电机转速调节。螺旋桨的主要参数是直径和螺距。桨的直径和螺距越大,提供拉力越大。螺旋桨升力除了抬起机身及搭载设备外,还需保留60%的动力完成前后左右动作,抵抗外界干扰以及避免电池电压降低后动力不足。
选用朗宇980 KV型号无刷电机,20 A电调和8038型号的纤维混合制造正反桨,产生最大理论拉力3.21× 10-2N。机身及搭载设备合计质量5.75×10-4kg,符合设计要求。图2是本文多旋翼无人机平台构建。
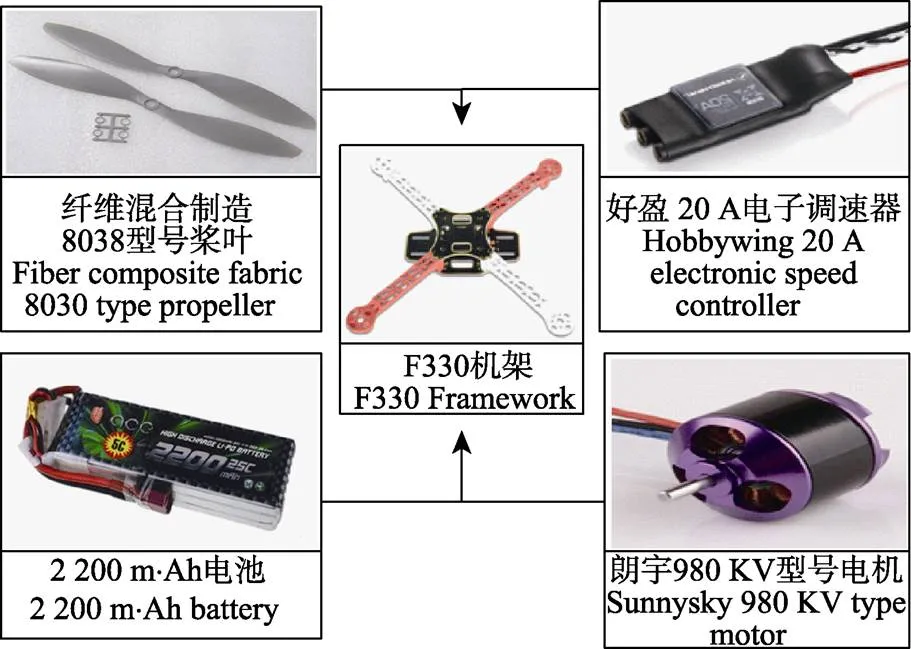
图2 用于农田信息采集的多旋翼无人机平台构建
3 多旋翼无人机控制系统
3.1 主控制器STM32F407设置
采用STM32F407作为无人机控制系统主控制器。它具有Cortex™-M4内核,工作频率168 MHz。使用两线式串行总线(inter integrated circuit,I2C)接口与6轴运动处理传感器MPU6050,磁强计AK8975通信。使用16位和32位定时器捕获遥控器通道输入PWM(pulse width modulation)信号和输出电机转速PWM控制信号[23-24]。STM32生产商德意法公司为用户提供固件库开发程序,方便用户使用固件库操作主控制器寄存器。
采用外部高速时钟(high speed external,HSE)作为主控制器时钟源,连接频率为8 MHz的石英谐振器。使用高级高性能总线(advanced high-performance bus,AHB)分频器分频。
设置STM32F407定时器TIM3为输入捕获模式以捕获测量4个输入通道的PWM脉冲宽度。设置每检测一次信号沿触发一次捕获,第一次设置为上升沿捕获。当TIM3检测到上升沿,记录此时定时器计数值,然后设置下降沿捕获,记录此时定时器计数值,定时器计数值前后两次时间差是高电平脉宽长度,即完成一次脉冲捕获。
STM32F407定时器TIM1输出4个通道的PWM信号以控制4个电机转速。设置输出频率为4 MHz,递增计数脉冲宽度调制(pulse width modulation,PWM)模式,修改捕获/比较寄存器以设置PWM占空比。
3.2 系统外接设备
主控制器外接设备包括4个发光二极管(light emitting diode,LED),6轴运动处理传感器MPU6050和3轴磁场计AK8975。使用LED显示系统不同状态,如表1所示,方便操控人员掌握无人机状态。

表1 LED显示系统不同状态
MPU6050集成了微机电系统(micro electro mechanical system,MEMS)3轴陀螺仪和3轴加速度传感器,用于测量机体角速度和加速度,芯片尺寸为4 mm×4 mm× 0.9 mm,具有可扩展数字运动处理器(digital motion processor,DMP)[25-26]。设置MPU6050采样频率为1 kHz,陀螺仪最大量程为±2 000 (°)/s,加速度传感器最大量程为±80 N。使用文献[27]方法对MPU6050进行校准。
AK8975是测量机体3轴磁场的磁强计芯片,芯片尺寸为4 mm×4 mm×0.75 mm[28]。控制系统上电后设置AK8975为单一测量模式,读取3轴磁场测量的原始数据并进行校正。采集2 000个数据作为校准样本,在样本中计算3轴各自测量的最大值、最小值、中心偏移值、总量程与量程增益。
3.3 系统运行与任务调度
无人机控制系统需要统筹执行多个任务,包括:多个传感器信息测量和姿态融合解算,处理遥控器通道输入信号、运行姿态增稳抗干扰控制,输出电机控制量。因此,使用时间调度方法对控制系统各任务进行统筹,使各个任务在指定时间内有序进行。控制系统对主控制器和外接设备初始化后,检查外接设备能否正常工作,然后各任务循环调度。控制系统把执行任务分为5个时间等级,分别在1、2、5、10、50 ms不同时间间隔内分别执行相应任务,如图3所示。
4 双闭环PID姿态控制
4.1 控制系统数学模型
四旋翼无人机运动微分方程由动力学和运动学两组方程组成[29]。对无人机进行运动分析,其可分为平移运动和旋转运动。
当不考虑旋转运动,仅考虑平移运动时,四旋翼在导航坐标系下受到的作用力主要来自于旋翼产生的升力Fn(N)、机体自身重力Fn(N)和空气阻力Fn(N)。根据空气动力学原理,Fb表示每个螺旋桨产生的升力,N。Fb下标1,2,3,4分别为对应旋翼,其方向始终为机体坐标系的b轴方向。Ω,表示电机转速,r/s。Ω下标1,2,3,4分别对应多旋翼的4个电机。Fb=kΩ2,其中k为电机转速Ω与对应旋翼升力Fb之间的转换系数[30-31],kg·m/r2。Fb=∑Fb。通过旋转矩阵把机体坐标系中的升力Fb转换为导航坐标系的升力Fn。Fn表示机体所受重力,方向垂直向下。Fn表示无人机受到的空气阻力。该力与无人机在导航坐标系三轴的飞行速度分量成正比,、、表示速度分量,m/s。Fn=[]T,其中,K,K,K为对应方向的平移阻力系数,kg/s。根据牛顿定律和导航坐标系中无人机的受力分析,可建立平移运动方程,如式(1)。
当不考虑平移运动,只考虑刚体自身受外力矩作用下的旋转运动时,用、、表示机体坐标系下绕三轴的转动角速度,(°)/s。、、表示机体坐标系下绕三轴的转动角加速度,(°)/s2。多旋翼在机体坐标系的旋转合力矩M,M,M(N·m),如式(2)。
式中J,J,J为机体三轴对应的转动惯量,kg·m2。
多旋翼的升力矩M,M,M(N·m),如式(3)。
式中为旋翼中心到机体质心的距离,m;为力到力矩转换系数,m。
四旋翼无人机在飞行过程中会出现陀螺力矩[32-36]M(N·m),如式(4)。
式中J表示旋翼转动惯量,kg·m2。结合式(2)、(3)、(4)得到旋转运动方程式(5)。
定义U为多旋翼控制系统的电机控制输入量[37-38],得式(6)。
式中1、2、3、4分别为上升、横滚、俯仰、偏航控制输入量。将式(6)代入式(1)、式(5)得式(7)多旋翼数学模型。
由式(7)可知,控制多旋翼需要掌握其姿态并能控制4个电机电压,以实现多旋翼运动控制。为了便于控制算法实现,根据下述3点简化多旋翼数学模型:1)多旋翼运动状态多为悬停状态和小角度变化,引入角度计算增加计算量,且角度相关项的计算值远小于其他项,因此可简化角度相关项;2)在悬停状态下,坐标旋转矩阵接近单位矩阵,机体坐标系的角加速度可认为是导航坐标系的姿态角加速度;3)由于仅有4个控制输入量1~4,因此在控制回路中不能控制多于4个变量,仅选择对姿态角与高度进行控制。式(8)为简化后的多旋翼控制模型。
控制算法处理控制输入量和传感器测量姿态,为平衡无人机姿态提供电机PWM控制信号,如图4a所示。
控制算法通过式(8)把姿态角与高度控制输入量转换为电机转速控制。控制策略采用PID技术。通过式(6)得式(9)电机转速控制矩阵,用于计算电机转速Ω与控制输入量U关系。
由式(9)可知,多旋翼无人机通过调节4个带桨电机转速实现姿态控制。每个电机的PWM控制量均由三轴姿态角控制量和上升控制量叠加,叠加的正负与电机位置相关。通过式(9)计算电机控制量,把相应电机控制量写入TIM1的4个通道PWM波形比较寄存器,调整电机转速。图5是多旋翼控制系统框图。

图5 多旋翼无人机控制系统框图
多旋翼无人机螺旋桨转速与升力呈非线性关系,属于欠阻尼系统。此外,无人机在农田低空飞行时,为避免受到风场、负载或磁场干扰,采用单闭环PID难以保持系统稳定。为此,加入角速度内环,构成双闭环PID控制结构。当受外界干扰时,可迅速回复平衡状态并具有较快的控制输入响应[39-41]。图4b是本系统采用的双闭环控制方法结构图。外环的姿态角度测量采用文献[27]方法,角速度采用MPU6050陀螺仪测量。
4.2 PID参数调整
PID参数整定是控制系统的关键。比例控制维持系统平衡,过大引起低频振荡;微分控制抑制偏差作用,过大会引起高频振荡;积分控制消除静差,过大引起系统震荡。采用工程凑试法获取合理的PID控制参数,选择参数时可先在大范围内尝试,确定小范围后,进行微小调节,反复调试以获得满意响应。图6为多旋翼无人机试验平台。
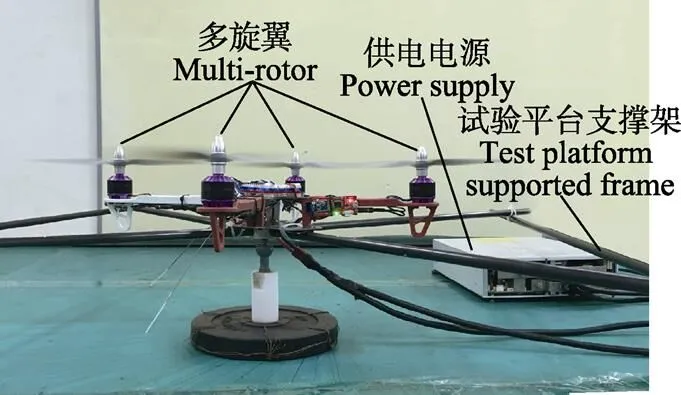
图6 多旋翼无人机飞行控制器试验平台
调整参数过程如下:首先调整双闭环中横滚角和俯仰角的内环角速度比例参数rot_p,其余参数设置为0,当rot_p很大时,飞机不能维持平衡,此时加入外环角度比例参数ang_p,并调整rot_p。合适的rot_p可使飞行器抗干扰,快速回复到平衡位置,不会造成连续振荡,但有静差。
然后调整内环微分参数rot_d。逐渐增大rot_d,飞机受到干扰后,回复速度加快。合适的rot_d可使飞机迅速回复但不会回复过猛,此时飞机存在静差。
加入积分控制,飞机可消除平衡静差,增大积分控制ang_i可加快回复速度。此时,需要调整rot_d和rot_p。调整内环PID参数后,飞机较理想的状态为1~2 s内回复到0°平衡位置。此时,飞机具有抗干扰能力且可控,但遥控器放舵后,飞机需要较长时间才回复到水平平衡位置。
加入航向角的外环和内环比例控制,较合理的参数可以使航向角受干扰后回复平衡。但当横滚和俯仰角受干扰后,飞机容易产生微小振动,此时应减少横滚与俯仰的rot_p。加入航向角的微分控制,逐渐增加rot_d,直到飞机回复较快且没有超调。加入内环积分控制消除航向角静差。不断调整rot_i和rot_d,直到系统回复速度较快同时超调减少,同时调整rot_p使系统在较短时间内回复到平衡位置。
内环参数整定后,飞机受小角度干扰后,能短时间内回复到平衡状态。但打舵时姿态角反应缓慢;施加大角度干扰后,飞机不能快速回复,因此需要调整横滚与俯仰外环比例控制。增加外环比例参数ang_p,飞机的打舵反应速度加快,但放舵和受干扰后产生高频振荡。此时减少rot_p使飞机在放舵或受干扰后反应趋于平缓,同时增加ang_p使飞机回复速度加快。调整航向角ang_p,使航向角在受干扰后回复速度加快且不会产生超调振荡。
然后调整外环微分与积分参数ang_d、ang_i。合适的ang_d使系统受干扰后,反应快速且平稳。调整ang_i使系统受干扰后可回复到0°平衡位置。但ang_i不能太大,否则造成系统稳定滞后。整定后得到本文无人机控制系统内环与外环合适的PID参数,如表2所示。
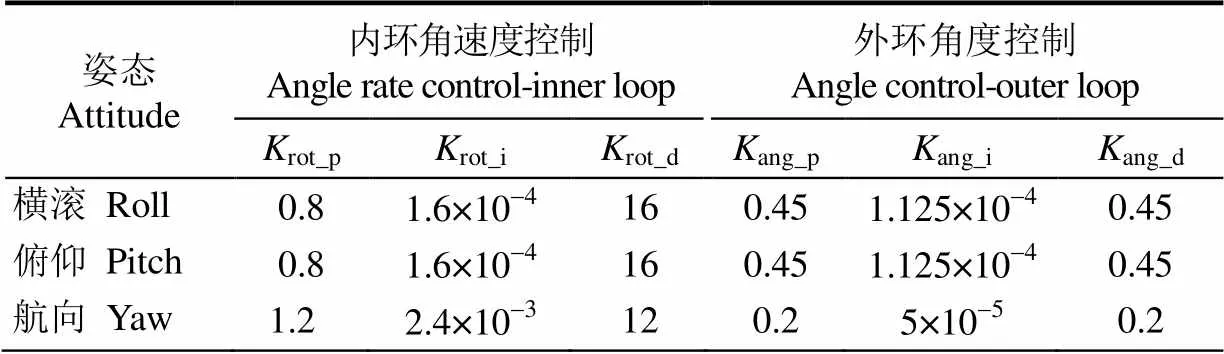
表2 整定后内环与外环控制合适的PID参数取值
注:rot_p,rot_i,rot_d为内环角速度控制的比例、积分、微分参数;ang_p,ang_p,ang_d为外环角度控制的比例、积分、微分参数。
Note:rot_p,rot_iandrot_dare proportional, integral and differential parameters of angle rate control-inner loop respectively;ang_p,ang_pandang_dare proportional, integral and differential parameters of angle control-outer loop respectively.
4.3 专家控制器
无人机控制过程除受外界干扰外,也受系统控制过程参数变化影响,如系统控制输入量,角度和角速度积分饱和,角度偏差变化率。因此引入专家控制方法,以适应无人机控制过程的姿态变化,达到加强稳定控制效果[42-43]。针对无人机控制过程特点,分析总结专家规则如下。
1)专家规则1:油门输入
通常一组PID参数仅适用于某一给定油门值。因此在遥控器油门输入变化情况下,需要调整积分限幅,限制电机输出总控制量。
因此将油门输入作为角度、角速度积分限幅参数。当油门输入控制量较小时,限幅按线性比例增加。当油门输入可使飞机起飞,积分限幅为常数。式(10)中的油门比重Thrrto为积分限幅参数。
式中CH_Thr为遥控器油门输入控制量。
2)专家规则2:角度与角速度积分限幅
PID输出控制量是电机PWM值,受电机最大转速限制。如果PID控制量超出电机有效执行范围,会发生“饱和效应”,系统不能按预期控制策略进行[44]。因此采用积分限幅方法,把积分控制限制在一定范围内,式(11)为角度积分控制ang_i()计算方法。
式中表示某一时刻,ang()为角度偏差,(°),最大控制角度为25°。因需要保留部分控制量给比例和微分控制,所以分配给角度积分控制的范围是最大姿态角度的一半。计算角度积分控制量时,先累加本次积分值,判断是否超出限值范围。若未超出,则按普通积分计算,若超出,则按积分限幅值计算。
角速度积分控制与角度积分控制使用相同抑制方法,使用式(12)计算角速度积分控制量rot_i()。
式中最大控制角速度为300 (°)/s。
3)专家规则3:角度偏差变速微分处理
微分控制有助于克服系统振荡,加快系统响应,减少调节时间。在一般PID算法中,微分系数是常数。为改善系统动态性能,采用变速微分方法,改变微分系数,使其与偏差大小相对应。
设置变速微分系数d(ang()),与当前偏差绝对值|ang()|关系如式(13),角度控制中变速微分控制量输出ang_d()如式(14)。
式(13)中,30°表示最大偏差角度。
4)专家规则4:输入输出限幅
在外环姿态角控制中,控制器把遥控器横滚和俯仰通道输入指令转化为期望角度,最大幅值为±25°,偏航通道按照0.3 (°)/s比例转换为航向角。输入姿态角与测量姿态角相减的偏差角度限值为±30°。外环角度输出控制量ang()转换为内环角速度控制的角速度期望值,范围是-300~300 (°)/s。然后与陀螺测量角速度相减,得到角速度偏差rot,作为内环控制输入,内环控制输出为电机控制量。角度控制输出量应该跟随角度偏差大小改变,引入角度控制比例系数out(ang())限制角度控制输出,如 式(15)。
5)专家规则5:内外环结合
按式(16)计算角度、角速度比例控制ang_p()、rot_p()。
利用本次陀螺仪测量角速度值rotreal()减去上次测量角速度值rotreal(-1)得角加速度,(°)/s2,与rot_d相乘,得角速度微分控制rot_d(),如式(17)。
式(18)计算角度、角速度PID控制。
式中ang()、rot()为角度、角速度控制输出量。采用式(19)互补滤波方法对ang()与rot()进行融合,计算双闭环PID专家姿态角控制输出量dual。
式中dual为内环与外环控制结合系数,取值0.2。dual()是双闭环专家PID姿态控制输出量,图4c是双闭环专家PID姿态角控制系统结构图。
5 试 验
5.1 抗干扰试验
多旋翼无人机姿态控制系统采用双闭环PID专家控制方法对姿态角进行控制。对横滚、俯仰、航向角施加扰动以测试无人机的稳定性。
在固定位置调整垫块高度,使平台支撑架接触垫块后,无人机侧倾角为5°、10°、15°、25°、30°。把遥控器油门推到中间位置,对测试平台支撑架施加外力,使其接触垫块,模拟无人机受干扰,在控制系统中采用文献[27]方法测量并输出无人机姿态角,以观察无人机受干扰后回复状况,通过无线传输方式将测量的姿态角变化发送到电脑。
图7为无人机在横滚、俯仰、偏航方向受干扰后姿态角变化。由图7可知,无人机在比例和微分控制作用下快速回复到平衡状态并略有超调,积分控制使无人机平衡时姿态角接近0°。该试验证明提出的双闭环PID专家控制方法能有效抑制干扰,保证无人机在较强干扰下能快速恢复并保持稳定状态。
表3是系统受不同干扰后恢复平衡状态的时间统计,记录了姿态变化曲线的上升时间和调节时间。
在传统PID控制中,当所受干扰增加,系统的上升时间和调节时间均增加。但在变速微分作用下,当干扰角度较大时,上升时间没有继续增加。在横滚与俯仰角方向,系统上升时间不超过0.27 s。系统在受到30°干扰后,横滚与俯仰角恢复平衡时间在3.4 s内,航向角时间在4 s内,系统在受到大角度干扰后能快速恢复到稳定状态。

图7 多旋翼无人机受姿态角不同角度干扰后自平衡过程
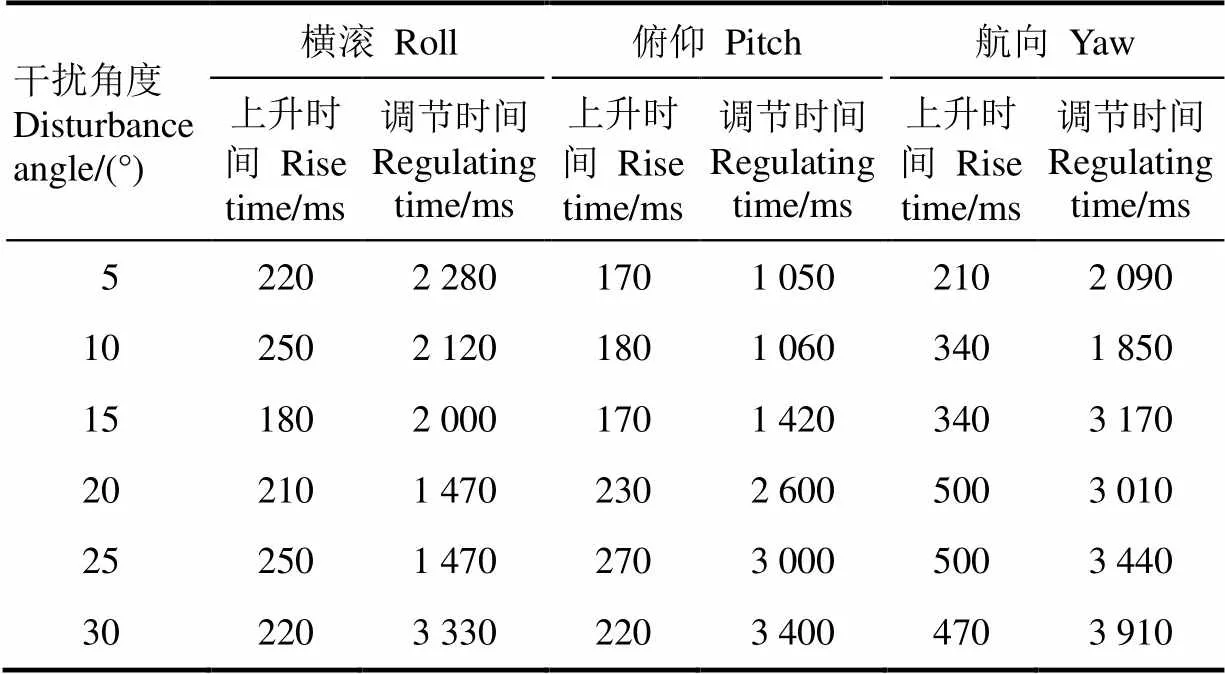
表3 系统受干扰后恢复平衡状态时间统计
5.2 阶跃响应试验
对多旋翼无人机进行阶跃响应试验。把遥控器油门摇杆推到中间位置,分别推动遥控器横滚、俯仰通道摇杆至最大控制角度一半,航向通道摇杆轻推到最大控制角度一半后立即回复中间位置,观察系统姿态角在阶跃输入后的响应曲线,如图8所示。
统计系统在阶跃输入后的上升时间,最大超调量,调节时间和振荡次数,以评价系统快速性和稳定性,如表4。由表4可知,当给多旋翼系统加入最大控制姿态角一半的阶跃输入后,横滚角最大超调量为53%,上升时间为0.77 s;俯仰角最大超调量为40%,上升时间为0.69 s;航向角最大超调量为19%,上升时间为0.8 s,横滚与俯仰角的调节时间为1~2 s,航向角的调节时间不超过3.4 s。横滚与俯仰角在阶跃响应中没有振荡,航向角振荡次数为1。系统能根据控制指令作出准确响应,最后收敛并趋于稳定。
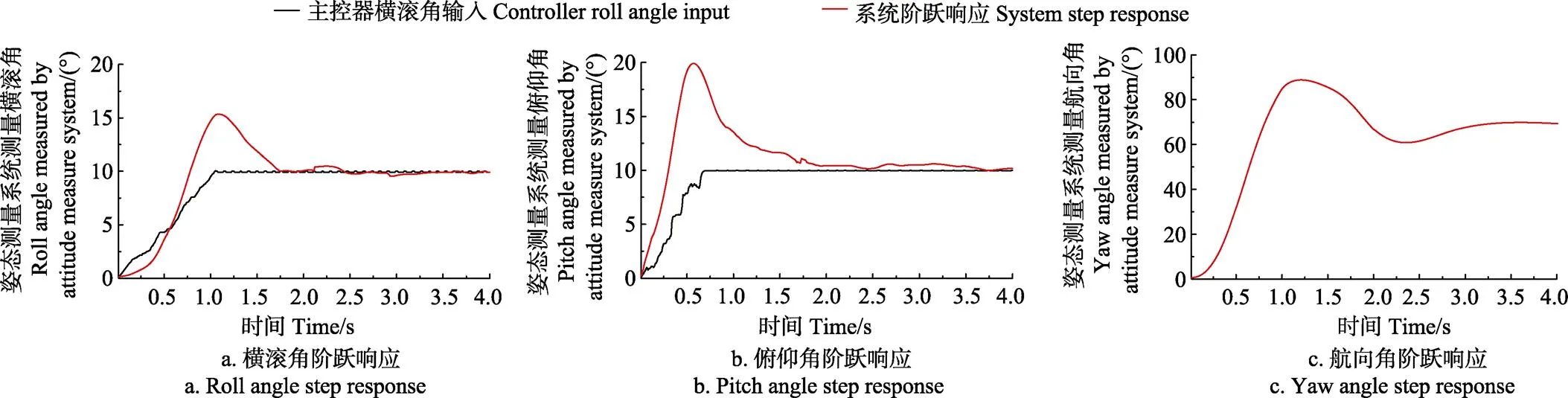
图8 多旋翼无人机姿态角阶跃响应
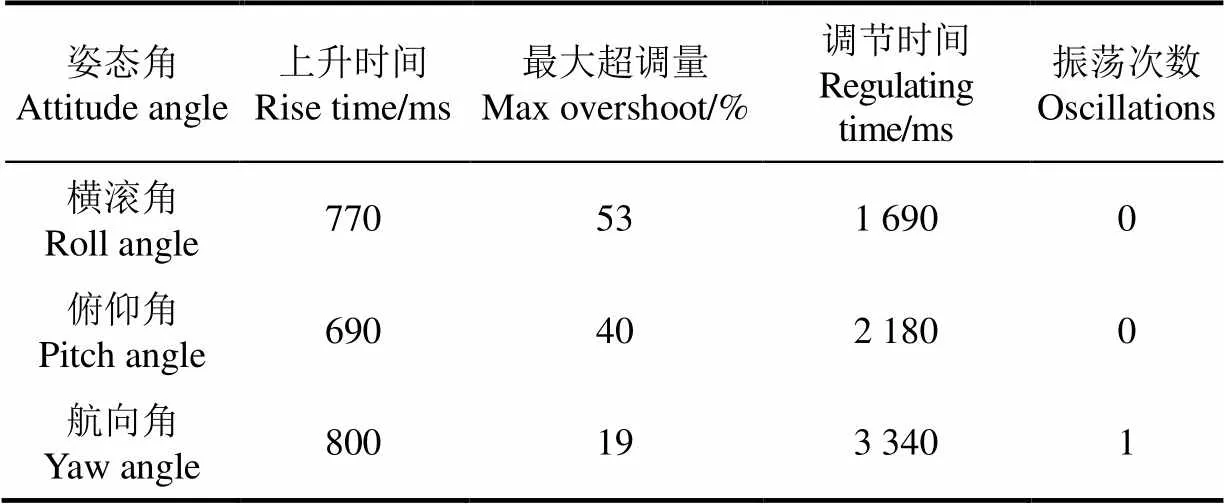
表4 系统阶跃响应性能参数统计
由图8和表4可知,设计的双闭环PID专家控制策略使多旋翼姿态控制系统具有响应快速、波动较小、可稳定控制性能。
5.3 室外农田环境飞行试验
在试验平台上,采用工程凑试法得到双闭环专家控制系统合适的PID参数,使无人机对控制输入具有良好响应,并具有抗干扰能力。在华南农业大学水稻育种基地试验田对无人机进行室外农田环境飞行试验。时间为十月上旬,水稻成熟,约有1 m高。试验选择在天气晴朗,风力为1~3级的天气环境下进行。在农田中,因田地潮湿,需要在1~2 m宽的田埂起飞与降落。试验过程中均采用相同质量的电池进行悬停、俯仰和偏航姿态运动飞行。
在双闭环PID无人机姿态角控制中,rot_p决定电机对期望角速度响应快慢。该值设定过高会使无人机摇摆不定,过低则造成响应缓慢。
ang_p决定无人机对主控器输入期望角度与实际角度之间误差的响应,并将输出的角度控制量转化为相应的期望角速度,然后输出至角速度控制器。增大该值会使飞机反应灵敏,加快响应和增强抗风能力。较低值会导致飞机反应非常缓慢,无法抵抗风的干扰。
增大ang_d值加强无人机恢复平衡能力和对遥控输入的响应。
航向控制的PID值决定了无人机根据偏航输入作出的旋转反应。增大该值会使无人机旋转更快。设置过高的航向ang_p或rot_p将使无人机摇摆不定,过低则不能保持机头朝向。因此在户外条件下,航向控制的内外环PID值不变,横滚和俯仰角的rot_p,ang_p,ang_d增加,其余不变。调整后横滚和俯仰的rot_p为1,ang_p为0.5,ang_d为1.5。
根据上述修正参数,多旋翼能在育种基地完成悬停、侧倾和前倾的飞行。多旋翼无人机飞行稳定,符合设计要求。试验时,通过无线数据传输方式把状态信息发送到电脑,在电脑保存数据并进行分析。分析结果如图9所示。
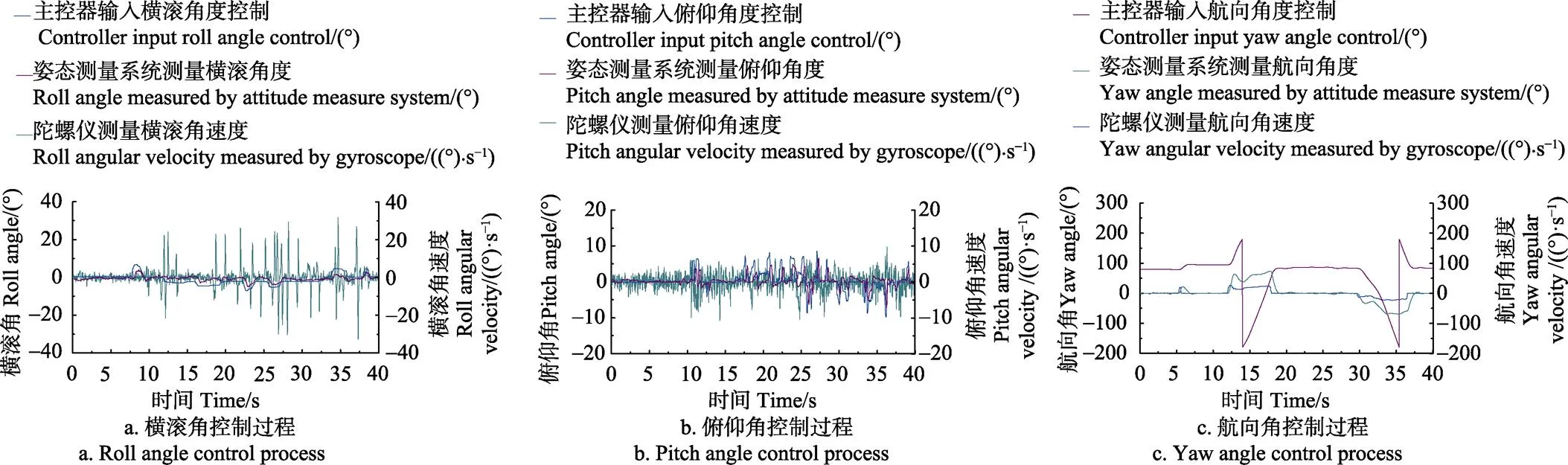
图9 多旋翼无人机室外农田环境姿态角控制过程
由图9可知,无人机接收到控制指令后,能根据指令在1~2 s内快速调整姿态。试验过程中,当姿态受风影响发生倾斜时,陀螺仪测量角速度大于3(°)/s,设计的控制策略能迅速调整电机转速,保持无人机姿态稳定平衡。设计的多旋翼无人机控制方法能有效抵抗干扰且能稳定控制姿态角,在微风干扰下能自动调整姿态平稳飞行,适用于低空农田信息采集。
6 结 论
通过对多旋翼无人机进行运动分析,搭建了适用于农田信息采集的多旋翼无人机试验平台。
1)设计了以STM32为主控制器与多传感器组成的控制系统,使用任务调度方法安排系统任务运行。建立控制系统的数学模型,采用双闭环PID控制方法,并使用工程凑试法找到合适的控制参数,使无人机具有自稳定能力。
2)引入专家控制方法,根据无人机控制过程特性加入专家规则,使控制系统在控制过程发生状态变化时及时调整控制参数,增强无人机的抗干扰能力。
3)对所设计的无人机控制系统进行抗干扰和阶跃响应试验。系统在受到30°干扰后,横滚与俯仰角恢复平衡时间在3.4 s内,航向角时间在4 s内。系统横滚角和俯仰角阶跃响应调节时间在1~2 s内,航向角在3.4 s内。试验结果表明:双闭环PID控制策略可实现多旋翼无人机姿态稳定控制,专家控制策略增强无人机的抗干扰能力。
4)在室外农田环境中,无人机能根据指令在约1~ 2 s内快速调整姿态。当姿态受风影响发生倾斜时,陀螺仪测量角速度大于3 (°)/s,设计的控制策略能迅速调整电机转速,保持无人机姿态稳定平衡。试验证明该控制系统稳定可控且具有较强抗干扰性,满足多旋翼无人机低空采集农田信息的要求。
[1] 薛新宇,兰玉彬. 美国农业航空技术现状和发展趋势分析[J]. 农业机械学报,2013,44(5):194-201. Xue Xinyu, Lan Yubin. Agricultural aviation applications in USA[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 194-201. (in Chinese with English abstract)
[2] 李继宇,张铁民,彭孝东,等. 小型无人机在农田信息监测系统中的应用[J]. 农机化研究,2010,32(5):183-186. Li Jiyu, Zhang Tiemin, Peng Xiaodong, et al. The application of small UAV (SUAV) in farmland information monitoring system[J]. Journal of Agricultural Mechanization Research, 2010,32(5): 183-186. (in Chinese with English abstract)
[3] 汪沛,罗锡文,周志艳,等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报,2014,30(18): 1-12. Wang Pei, Luo Xiwen, Zhou Zhiyan, et al. Key technology for remote sensing information acquisition based on micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 1-12. (in Chinese with English abstract)
[4] 李继宇,张铁民,廖懿华,等. 农田信息采样方式及飞行器平台设计[J]. 振动、测试与诊断,2013,33(3):466-471,529. Li Jiyu, Zhang Tiemin, Liao Yihua, et al. Field information sampling methods and aircraft platforms design[J]. Journal of Vibration, Measurement and Design, 2013, 33(3): 466-471, 529. (in Chinese with English abstract)
[5] 庞庆霈,李家文,黄文浩. 四旋翼飞行器设计与平稳控制仿真研究[J]. 电光与控制,2012,19(3):51-55. Pang Qingpei, Li Jiawen, Huang Wenhao. Design of a quadrotor helicopter and its smooth motion control simulation[J]. Electronics Optics and Control, 2012, 19(3): 51-55. (in Chinese with English abstract)
[6] 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10. Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract)
[7] 洪宇,龚建华,胡社荣,等. 无人机遥感影像获取及后续处理探讨[J]. 遥感技术与应用,2008,23(4):462-466. Hong Yu, Gong Jianhua, Hu Sherong, et al. Discussion on UAV remote sensing image capture and disposal[J]. Remote Sensing Technology and Application, 2008, 23(4): 462-466. (in Chinese with English abstract)
[8] 苗晋玲.基于ARM的三自由度直升机嵌入式控制系统设计[D].南昌:南昌航空大学,2010. Miao Jinling. Design of an Embedded Control System for 3 DOF Helicopter Based on ARM[D]. Nanchang: Nanchang University of Aeronautics, 2010. (in Chinese with English abstract)
[9] 凌金福.四旋翼飞行器飞行控制算法的研究[D].南昌:南昌大学,2013. Ling Jinfu. Study of Flight Control Algorithm for Quad-rotor Aircraft[D]. Nanchang: Nanchang University, 2013. (in Chinese with English abstract)
[10] 贾燕波.四旋翼飞行器控制算法的研究[D].济南:山东师范大学,2015. Jia Yanbo. Study of Control Algorithm for Four-rotor Aircraft[D]. Jinan: Shandong Normal University, 2015. (in Chinese with English abstract)
[11] 段国强.四旋翼无人直升机仿真及控制方法比较研究[D].哈尔滨:哈尔滨工业大学,2013. Duan Guoqiang. Simulation and Control Method Comparative Study of Four-rotor Unmanned Helicopter[D]. Harbin: Harbin Institute of Technology, 2013. (in Chinese with English abstract)
[12] 宋述锡.四旋翼无人直升机控制算法研究[D].沈阳:沈阳航空航天大学,2013. Song Shuxi. Research on Control Algorithm for Quadrotor Unmanned Helicopter[D]. Shenyang: Shenyang Aerospace University, 2013. (in Chinese with English abstract)
[13] 赵金亮.微型四旋翼飞行器控制方法研究及控制器设计[D].锦州:辽宁工业大学,2016. Zhang Jinliang. Research on Control Method and Controller Design for Micro Quadrotor Aircraft[D]. Jinzhou: Liaoning University of Technology, 2016. (in Chinese with English abstract)
[14] 黄水长.四旋翼无人机一种复合控制方法的研究[D].邯郸:河北工程大学,2016. Huang Shuichang. Research on a Compound Control Method for Quadrotor UAV[D]. Handan: Hebei University of Engineering, 2016. (in Chinese with English abstract)
[15] 单海燕.四旋翼无人直升机飞行控制技术研究[D].南京:南京航空航天大学,2008. Shan Haiyan. Research on Flight Control Technology of a Quad-rotor Unmanned Helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008. (in Chinese with English abstract)
[16] 黄溪流.一种四旋翼无人直升机飞行控制器的设计[D].南京:南京理工大学,2010. Huang Xiliu. Design of Flight Controller for a Four-rotor Unmanned Helicopter[D]. Nanjing: Nanjing University of Science and Technology, 2010. (in Chinese with English abstract)
[17] 刘志军.一种自主飞行四旋翼系统设计与实现[D].西安:西安科技大学,2014. Liu Zhijun. The Design and Implementation of an Autonomous Flight Four Rotor System[D]. Xi'an: Xi'an University of Science and Technology, 2014. (in Chinese with English abstract)
[18] 齐晓龙,雷继海.双闭环串级控制算法在四旋翼飞行器中的应用[J].自动化与仪器仪表,2016(4):90—92. Qi Xiaolong, Lei Jihai. Double closed-loop control algorithm applied in four-rotor aircraft[J]. Automation & Instrumentation, 2016(4): 90—92. (in Chinese with English abstract)
[19] 孙鹏.微小型无人直升机姿态PID控制及试验研究[D].长沙:国防科学技术大学,2008. Sun Peng. PID Attitude Control and Experimental Research of The Mini Unmanned Helicopter[D]. Changsha: National University of Defense Technology, 2008. (in Chinese with English abstract)
[20] 刘浩蓬,龙长江,万鹏,等. 植保四轴飞行器的模糊PID控制[J]. 农业工程学报,2015,31(1):71-77. Liu Haopeng, Long Changjiang, Wan Peng, et al. Fuzzy self-adjusting proportion integration differentiation for eppo quadrocopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 30(1): 71-77. (in Chinese with English abstract)
[21] 张天光,王秀萍,王丽霞. 捷联惯性导航技术[M]. 北京:国防工业出版社,2007.
[22] 秦永元.惯性导航[M].北京:科学出版社,2006:7-8.
[23] STMicroelectronics. STM32F405/415, STM32F407/417, STM- 32F427/437 and STM32F429/439 advanced ARM®-based 32-bit MCUs[EB/OL]. [2016-09-01]. http://www.st.com/ content/ccc/resource/technical/document/reference_manual/3d/6d/5a/66/b4/99/40/d4/DM00031020.pdf/files/DM00031020.pdf/jcr:content/translations/en.DM00031020.pdf.
[24] STMicroelectronics. ARM Cortex-M4 32b MCU+FPU, 210DMIPS, up to 1MB Flash/192+4KB RAM, USB OTG HS/FS, Ethernet, 17 TIMs, 3 ADCs, 15 comm. interfaces & camera[EB/OL]. [2016-09-01]. http://www.st.com/content/ ccc/resource/technical/document/datasheet/ef/92/76/6d/bb/c2/4f/f7/DM00037051.pdf/files/DM00037051.pdf/jcr:content/translations/en.DM00037051.pdf.
[25] InvenSense Inc. MPU-6000 and MPU-6050 Product Specification Revision 3.4 [EB/OL]. [2013-08-19]. https://www. invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf.
[26] InvenSense Inc. MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.2[EB/OL]. [2013-08-19]. https:// www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Register-Map1.pdf.
[27] 廖懿华,张铁民,廖贻泳. 基于模糊-比例积分偏差修正的多旋翼飞行器姿态测算系统[J]. 农业工程学报,2014,30(20):19-27. Liao Yihua, Zhang Tiemin, Liao Yiyong. Multi-rotor aircraft attitude detection system based on fuzzy-proportion integration deviation correction[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(20): 19-27. (in Chinese with English abstract)
[28] AsahiKASEI. AK8975/AK8975B 3-axis Electronic Compass[EB/OL]. [2009-12-01]. http://www.ic37.com/AKM/ AK8975_datasheet_13180305.
[29] 白敬洁. 四旋翼飞行器的滑模控制算法研究[D]. 哈尔滨:哈尔滨理工大学,2015. Bai Jingjie. Sliding Mode Control Algorithm for Quad-rotor Aircraft[D]. Harbin: Harbin University of Science and Technology, 2015. (in Chinese with English abstract)
[30] 翁新武. 基于S0PC的微型无人机飞行控制系统设计与实现[D]. 长春:长春工业大学,2015. Weng Xinwu. The Research and Realization of Micro UAV Flight Control System Based on SOPC[D]. Changchun: Changchun University of Technology, 2015. (in Chinese with English abstract)
[31] 刘浩蓬. 植保四轴无人飞行器关键技术研究[D].武汉:华中农业大学,2015. Liu Haopeng. Key Technologies of Eppo Unmanned Quadrocopter[D]. Wuhan: Huazhong Agricultural University, 2015. (in Chinese with English abstract)
[32] 张立珍. 无人机自主飞行控制系统的设计[D]. 南京:南京航空航天大学,2011. Zhang Lizhen. Design on Autonomous Flight Control System of Unmanned Aerial Vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011. (in Chinese with English abstract)
[33] 王俊生,马宏绪,蔡文澜,等. 基于ADRC的小型四旋翼无人直升机控制方法研究[J]. 弹箭与制导学报,2008,28(3):31-34,40. Wang Junsheng, Ma Hongxu, Cai Wenlan, et al. Research on Micro quadrotor control based on ADRC[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2008, 28(3): 31-34, 40. (in Chinese with English abstract)
[34] 王俊生. 四旋翼碟形飞行器控制系统设计及控制方法研究[D]. 长沙:国防科学技术大学,2007. Wang Junsheng. Design of Control System and Research on Control Method for the Quad-rotor[D]. Changsha: National University of Defense Technology, 2007. (in Chinese with English abstract)
[35] 王福超. 四旋翼无人飞行器控制系统设计与实现[D]. 哈尔滨:哈尔滨工程大学,2013. Wang Fuchao. Research on the Control System of Quadrotor UAV[D]. Harbin: Harbin Engineering University, 2013. (in Chinese with English abstract)
[36] 聂博文. 微小型四旋翼无人直升机建模及控制方法研究[D]. 长沙:国防科学技术大学,2006. Nie Bowen. Research of Micro Quadrotor UAV Modeling and Control Method[D]. Changsha: National University of Defense Technology, 2006. (in Chinese with English abstract)
[37] Bresciani T. Modelling, identification and control of a quadrotor helicopter[EB/OL]. [2008-10-01]. http://www. control.lth.se/documents/2008/5823.pdf.
[38] 刘昌龙. 四旋翼无人机建模与控制问题研究[D]. 武汉:湖北工业大学,2016. Liu Changlong. Research on Modeling and Control for Quadrotor UAV[D]. Wuhan: Hubei University of Technology, 2016. (in Chinese with English abstract)
[39] 黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010:1-5.
[40] 刘金琨. 先进PID控制及其MATLAB仿真[M]. 北京:电子工业出版社,2003:1-15,53.
[41] 陶永华,尹怡欣.葛芦生.新型PID控制及其应用[M]. 北京:机械工业出版社,1998:81—86.
[42] 黄辉先. 混合煤气热值智能PID控制[J]. 自动化仪表,1996,17(6):17-20,44-45. Huang Huixian. The intelligent PID control for thermal value of mixing gas[J]. Process Automation Instrumentation, 1996, 17(6): 17-20, 44-45. (in Chinese with English abstract)
[43] 罗安,路甬祥. 专家PID控制器及应用[J]. 信息与控制, 1992,21(3):151-155. Luo An, Lu Yongxiang. Expert PID controller and its application[J]. Information and Control, 1992, 21(3): 151—155. (in Chinese with English abstract)
[44] 宋占魁.小型四旋翼无人飞行器非线性控制方法研究[D].大连:大连理工大学,2014.Song Zhankui. Research on Nonlinear Control Method for Small-Scale Unmanned Aerial Vehicle[D]. Dalian: Dalian University of Technology, 2014. (in Chinese with English abstract)
Design and test ofattitude stabilization control system of multi-rotor unmanned aerial vehicle applied in farmland information acquisition
Liao Yihua1, Zhang Tiemin1※, Lan Yubin2
(1.510642,; 2.510642,)
Farmland information acquisition is the basis of precision agriculture. Multi-rotor unmanned aerial vehicle (UAV) can obtain farmland information quickly, efficiently and accurately. But as an under actuated system, the flight stability of multi-rotor UAV is susceptible to natural wind, electromagnetic interference and the near surface factors in farmland environment. The flight stability control method is important in multi-rotor UAV flight and affects qualified information acquisition. In this paper, multi-rotor UAV was adopted as research object and its body coordinate system and navigation coordinate system were established. Based on its motion analysis, changing 4 motors speed can realize multi-rotor UAV attitude regulation. The multi-rotor UAV platform consisted of brushless motors, electric speed controllers and composite-fiber fabric propellers. The flight control system was designed based on STM32F407 as master controller, MPU6050 as motion sensor integrated with 3-axis accelerometer and 3-axis gyroscope, AK8975 as 3-axis magnetometer. The attitude of multi-rotor UAV was measured and computed by the sensors above. The timers in the controller were used for capturing the input signals from remote control and generating PWM output signals for motors control. Multiple tasks including attitude measurement remote control input process, attitude stabilization management and motors control output were scheduled by task scheduling method in the control system. The mathematical model of multi-rotor UAV attitude control was established. Through matrix calculation, the multi-rotor UAV attitude angle and throttle control inputs were mapped to each motors speed control. Then the control principle applied in this study was explained. The double closed-loop proportional integral differential (PID) control strategy with angular velocity as the inner feedback loop and angle as the outer feedback loop was proposed. A multi-rotor UAV experimental platform was built to gain the proper PID control parameters of inner and outer control loops through engineer debugging method. The double closed loop PID control method was further improved by expert control strategy. The expert control rules included throttle input ratio definition, angle and angular velocity integration limitation, angle differential control parameter variation, input and output control limitation. By introducing the expert rules, the control parameters were diverse to be adapted to the multi-rotor UAV attitude change. Anti-interference tests and step response tests were taken to testify the designed control system on the experimental platform. In the traditional PID control, when interference angle increased, the rise time and the adjustment time of the system increased. But under the effect of variable derivative, when the interference angle became large, the rise time did not increase. The rise time of the system was less than 0.27 s. When the system was subjected to 30°interference angle, the adjustment times for roll angle, pitch angle and yaw angle restored to balance were less than 3.4 and 4 s respectively. In the step response tests, rise time, maximum overshoot, adjustment time and oscillation frequency of the system were recorded. According to the statistics, the maximum adjustment times for roll angle, pitch angle and yaw angle were less than 2.2 s and 3.4 s respectively. It proved that the double closed-loop PID expert control strategy adopted in this paper made the multi-rotor UAV have quick response, small fluctuation and stable control performance. Rice breeding base was chosen as outdoor farmland circumstance to test the multi-rotor UAV attitude control performance. Because the multi-rotor UAV flight cannot avoid wind interference in outdoor, higher inner loop proportion value, outer loop proportion and differential value in roll and pitch control made the multi-rotor UAV more agile, responsive to control input and stronger resistance to wind disturbance. In the outdoor farmland flight tests, the collected information were sent to computer through wireless data transmission and were stored and analyzed in computer. From the experiment results, it could be concluded that the multi-rotor UAV can regulate its motors speed in a short while and adjust its attitude according to the remote control input in 1-2 s. When the multi-rotor UAV flight control was disturbed by wind, the angular velocities measured by gyroscope were larger than 3 (°)/s, the control strategy made the multi-rotor UAV automatically adjust its attitude to keep stable flight and effectively resist to the wind disturbance. It proved that the control strategy designed in this research is suitable for multi-rotor UAV applied in farmland information acquisition.
unmanned aerial vehicles(UVA); flight control systems; attitude control; flight experiment; expert PID controller; information acquisition
10.11975/j.issn.1002-6819.2017.03.012
V275+.1
A
1002-6819(2017)-03-0088-11
2016-07-29
2016-12-07
国家高技术研究发展计划(“863”计划)资助项目(SS2013AA102303);机器人学国家重点实验室开放课题资助项目(RL2012-O02)
廖懿华,博士,主要从事农业航空应用技术研究。广州华南农业大学南方农业机械与装备关键技术教育部重点实验室,510642。 Email:liaoyihuags@163.com
张铁民,教授,主要从事智能检测与控制、农业航空应用和机器人技术、农业电气化与自动化研究。广州华南农业大学南方农业机械与装备关键技术教育部重点实验室,510642。Email:tm-zhang@163.com
廖懿华,张铁民,兰玉彬.农田信息采集用多旋翼无人机姿态稳定控制系统设计与试验[J]. 农业工程学报,2017,33(3):88-98. doi:10.11975/j.issn.1002-6819.2017.03.012 http://www.tcsae.org
Liao Yihua, Zhang Tiemin, Lan Yubin.Design and test of attitude stabilization control system of multi-rotor unmanned aerial vehicle applied in farmland information acquisition[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(3): 88-98. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.03.012 http://www.tcsae.org
