汽车前照灯近光明暗截止线确定方法研究
2017-02-27李祥兵
李祥兵
(神龙汽车有限公司,湖北武汉 430050)
汽车前照灯近光明暗截止线确定方法研究
李祥兵
(神龙汽车有限公司,湖北武汉 430050)
结合神龙公司开发的东风标致3008前照灯,探讨明暗截止线清晰度和V点的确定方法。
明暗截止线;前照灯;最大等级法
汽车近光明暗截止线,即光束投射到配光屏幕上,目视感觉到的明暗显著变化的分界线。汽车前照灯近光明暗截止线的高低,意味着近光在路面上照射距离的远近。近光截止线太高,容易使对面的来车或行人感到炫目;太低则照得太近,使驾驶员无法看到车前较远的距离。因此,近光明暗截止线的高度稳定对于行车安全和驾驶体验都非常重要。通常,在近光截止线的获取中,光屏上会出现一种比较模糊的截止线,导致截止线无法正常被设备捕捉。本文基于神龙公司3008前照灯开发项目,对模糊截止线的确定方法进行了深入探讨。
1 近光明暗截止线的获取方法
根据相关法规,当近光灯打开时,在汽车前照灯的正前方路面,会形成一种非对称的光形面。根据所在的区域,可划分为照距区域(明暗截止线区域,车前50~75 m处的区域)、舒适区域(车前30~50 m的区域)、宽度(近光的最大宽度,车前20~30m)和驾驶盲区(车前20m以内)[1]。
若在车前30 m以内的任意处放置一光屏,则会形成如图1所示的上暗下明的清晰明暗截止线。
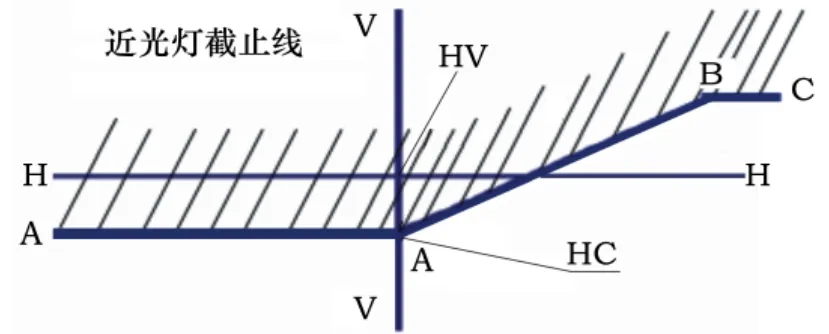
图1 近光形成的明暗截止线
图1中,明暗截止线上水平线A-A的离地高度需要满足国标的要求,即该高度应在0.7~0.9H(其中H为近光灯基准中心的离地高度,光屏应在车前距近光基准中心10m处)之间,该高度同时对照明的宽度有影响。15°斜线A-B-C的最大离地高度决定了近光照距的远近。通常情况下,要使近光照得足够远,驾驶员视野足够清晰,除需要近光截止线满足国标要求外,还需要根据国标的相关规定使近光的照度满足要求。一般而言,对于近光截止线,其光形角度应该满足的要求是:光形的角度线不能超过15°±1°30′,水平线不能超过0°±1°30′,截止线应该清晰可见。
2 模糊明暗截止线的清晰度
在很多情况下,由于照度、光学设计等原因,造成近光的截止线在光屏上并非像图1所显示的那样清晰。根据GB4599中规定[2],明暗截止线的转折处应在V-V线上,若转折处不清晰,则以满足75R、50R的照度为准。图2是东风标致3008前照灯的近光截止线图。尽管从远处看还比较清晰,但是在水平线和15°的分界线的交界处,显示高低不平,不清晰,导致该点用现有的技术来捕捉HC点比较困难,进而确定近光的相关参数比较困难。

图2 标致3008前照灯近光明暗截止线
通常情况下,前照灯近光明暗截止线理论分界线和实际分界线重合部分由两部分组成:水平区域(左侧部分从-5%到-1.75%,等同于-3°到-1°区域)及分界线的倾斜区域(右侧部分从1.75%到5%,倾斜度为15°),如图3所示。
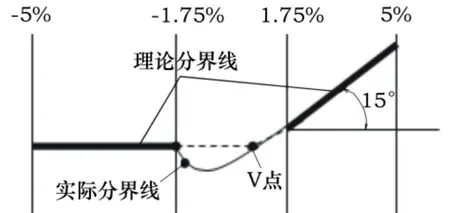
图3 明暗截止线的理论定义
中间部分的理论定义一般取消,因为前照灯在该处的重合性一般不好。中间这一段以及水平线与15°线交点可以用下面的最大等级法来实现。
3 最大等级法的计算机理
最大等级法是确定清晰明暗截止线以及V点的一种理论计算方法。其基本原理就是在图4中E1和E2的位置分别设置一个传感器,高度距离为0.2%。在竖直方向上扫描光束以确定光照界限,根据车辆的行驶方向确定HC的左侧和右侧处1°、2°和3°进行扫描测量,并分别对3台车进行同样的测量,确定最大等级。采用以下公式

式中:E1——传感器1的照度,lux;E2——传感器2的照度,lux)。
在通常情况下,如果以上3个值介于0.3~0.6之间即认为合格,即模糊度合格。
上述最大等级公式也说明分界线应位于f1的最大处,这样才能得到光强最大点。当得到-1°、-2°和-3°的分界线后,取3个值的平均值计算得到0°处的点,通过一系列翻转对该点进行调节。

图4 最大等级法传感器的布置图
在理论上,通过1个或2个传感器从上往下扫描+ 2%到-2%的区域,发光强度的变化通过计算机来计算。通过对-1°、-2°和-3°进行扫描可以得到3条曲线。但是,按照上述标准计算的值具有不确定性,原因在于2个传感器E1和E2存在0.2%的偏差。当测试仪器在垂直方向扫描时,其扫描过的位置并不一定是传感器的实际位置,因此,需要补充另一个公式来对上述误差进行修正

这样,截止线的精确位置和V点就可以用以下关系式来表达

4 试验验证
4.1 数据处理
在东风标致3008前照灯上,采用了H9双功能椭球模块(近远光一体),其近光明暗截止线由遮光板来实现。这3条曲线区域所得到的照度数据分别对应-1°、-2°和-3°的测量值。
由-1°、-2°和-3°在水平截止线上除X=0的值,对应的照度值相差较小,其余的对应部位按照强度从大到小逐步变化。
下面按照前面所述的公式来进行推算

式中:i,j=1,2,3…
通过对实际测试数据进行处理,可以得出表1,表2和表3中数据。
4.2 对-1°、-2°和-3°截止线位置的讨论
通过表1、表2和表3,可以得到在-1°、-2°和-3°三种情况下在V-V方向的f1的平均值。由该平均值,可以得到图5所示的曲线。
从图5可以看出,表1所得出的f1(-1°)在Y方向的值最大,按照前面的最大等级法的原则,应该选择该组数据来计算截止线的实际位置。

表1 扫描-1°时的对比度

表2 扫描-2°时的对比度

表3 扫描-3°时的对比度

图5 实际测量值对应的f1曲线图
由表1中的数据,并根据公式(2),同样可以得出f2的计算数据。通过对数据进行分析,可以看出,无论照度在某一区域多大,其对应的修正值都比较小。因此,得出的实际明暗截止线为图6所示。

图6 实际的明暗截止线
尽管图6从趋势上看,有一个很大的陡坡,但是由于最大照度与最小照度之间相差约1.1142lux,即相当于约700 cd(1 lux=625 cd)的光强,在理论上仍然是允许的。那么根据公式(3)中的结论,该曲线就是实际要找到的明暗截止线,图6中的最高点就是明暗截止线上的V点位置。
从以上分析中,得出了实际的截止线以及V点位置,但实际上,这条截止线用肉眼仍然是无法看出来的,主要原因在于近光光形的品质欠佳(水平角度不满足0°±1°30′,光形角度线不能满足15°±1°30′要求)和截止线不清晰。
5 结论
通过以上分析,可以得出以下结论。
1)从表1、表2和表3中可以看到,在同一水平线上,所显示的照度数值并没有太明显的变化。这说明明暗截止线在水平方向基本趋于均匀,这同时也说明遮光板或遮光帽的形状没有出现飞边等严重的品质问题。
2)基于表1的数据计算出来明暗截止线,反映了在-1°、-2°和-3°处连续扫描的最优明暗截止线,该明暗截止线同时也说明了照度值在此截止线两侧分布(Y向)的差异性要比其他两组数据明显,而这正是在截止线比较模糊的情况下,所得出的相对清晰的截止线。V点的确定一般处在明暗截止线的最亮点,即明暗截止线照度最大点,该点决定了照距的远近,对近光的整个配光效果具有重要的意义。
本文所阐述的理论值计算方法,尽管在数据的处理上相对较为复杂,但是在当前的设备无法捕捉的情况下,该方法对明暗截止线和V点的获取,并对设备的参数修正具有一定的指导意义。
[1]B25 7110[M]:STN FACE ARRIERE,FACE LATERALE ECLAIRAGE ET SIGNALISATION.
[2]GB4599—2007,汽车用灯丝灯泡前照灯[S].
[3]柳发苔,吴锡琪,饶文碧,等.前照灯近光明暗截止线质量评判[J].中国照明电器,1997(5):25-29.
[4]郑志军,胡永亮.汽车前大灯明暗截止线偏移问题探索[J].照明工程学报,2012,23(2):108-111.
[5]王丽君.LED汽车前照灯光学设计与实现[D].广州:华南理工大学,2012.
[6]杨树忠,张昆.汽车前大灯照明特性的测试[J].汽车电器,2000(6):55-57.
[7]赵红.E型汽车前照灯光形质量问题分析[J].青海科技,1997(4):31-33.
(编辑心翔)

图12 不同海拔环境高速大负荷阶段空燃比对比
4 优化后验证结果
通过高海拔排放试验验证和标定参数的优化,最终车辆达到欧IV标准要求,具体结果见表4。
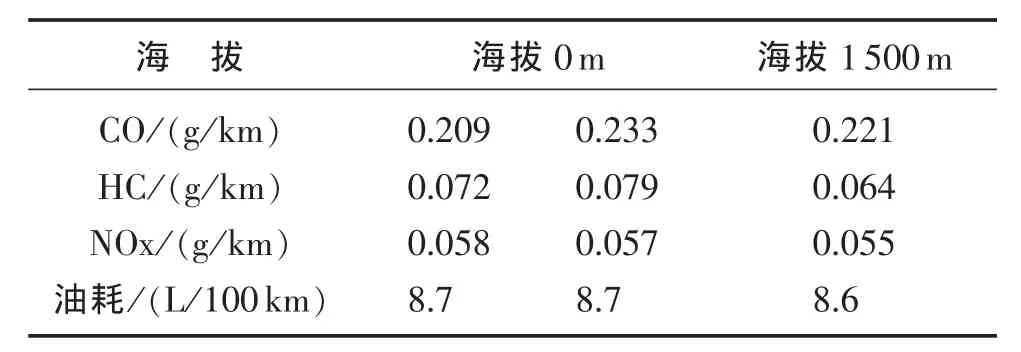
表4 优化后的高海拔环境下排放结果
5 结论
综上所述,为改善高海拔条件下整车的排放,对装备二次空气泵的发动机,在进行标定过程中,需考虑以下方案。
1)调整二次空气泵工作时的空燃比控制,确保高海拔环境下二次空气泵工作期间的空燃比处于最佳。
2)通过发动机台架试验,验证不同海拔环境下的发动机泵气损失差异,依据测试的泵气损失差异标定整车转矩。
3)高速大负荷阶段,避免进入开环加浓控制。
参考文献:
[1]石建,刘献栋.高原条件下车辆动力性能分析及改进研究[C]//2009中国汽车工程学会年会论文集,2009.
[2]GB 18352.3—2005,轻型汽车污染物排放限值及测量方法(中国III、IV阶段)[S].
[3]刘乐,陆红雨,王玉伟,等.不同海拔下自然吸气轻型汽油车性能研究[J].汽车工程,2014(8):929-934.
(编辑心翔)
Research on Low Beam Cut-off Line Confirmation of Front Lamp
LI Xiang-bing
(Dongfeng Peugeot Citroen Automobile Company,Wuhan 430050,China)
Referring to Peugeot 3008 front lamp produced by DPCA,this article discusses the definition of cut-off line and the way to confirm V point.
cut-off line;front lamp;maximum rating method
U463.651
A
1003-8639(2017)01-0019-04
2016-06-06
李祥兵(1981-),男,硕士,工程师,主要研究方向车灯开发设计。
