系杆拱桥吊杆张拉调索方法的比选及实施
2017-02-16年福龙
年福龙
(上海城投航道建设有限公司,上海市 2 00092)
系杆拱桥吊杆张拉调索方法的比选及实施
年福龙
(上海城投航道建设有限公司,上海市 2 00092)
以上海大芦线二期航道整治桥梁工程的湖北桥系杆拱桥为例,对施工监控过程的吊杆张拉调索方法-基于影响矩阵法的分批张拉调索法与计算机控制的同步智能张拉调索法进行比选。采用传统的吊杆分批张拉调索法,吊杆张拉力的计算量大,吊杆力误差积累需要多次调整;而同步智能张拉调索法的吊杆力调整方便、控制精确,且张拉速度快。湖北码头桥的工程实践证明,同步智能张拉调索法的优势明确,值得类似工程的借鉴。
系杆拱桥;施工监控;吊杆力调整;影响矩阵法;同步智能张拉调索法
1 工程概况
湖北码头桥位于大治河西段,是上海市大芦线航道整治二期工程跨航道桥梁工程中的一座桥梁。湖北码头桥南岸为规划浦江港区,桥位处航道远期设计面宽117 m,通航净宽105.5 m、净高7.0 m。主桥采用下承式系杆拱桥,主跨跨径123 m,主桥长125.4 m、宽12.4 m。湖北码头桥主桥立面布置见图1。
主桥拱肋系统由拱肋、风撑等构件组成;主拱竖直,立面矢高24.6 m,矢跨比f/L=1/5;两侧拱肋间设6道风撑。拱桥桥面系主梁为变截面钢-混凝土结合梁结构;跨中全高2.5 m,支点处全高3.5 m;结合梁是主纵梁、中横梁、端横梁、小纵梁、挑臂组成的双主梁梁格体系。吊杆顺桥向间距8 m,每个吊点为单吊杆;全桥总共28根吊杆,中间吊杆采用12股Φs15.2环氧钢绞线,端吊杆采用19股Φs15.2环氧钢绞线。平衡拱肋推力的水平系杆索采用环氧钢绞线,主梁每侧主纵梁箱内各布置4根水平系杆,每根系杆由12股Φs15.2钢绞线组成。
主桥钢结构在工厂分段制作后运输到现场,吊装到桥位临时支架进行拼装,采用先梁后拱的施工方法。
在主桥的施工过程中,有效的施工监控工作非常重要,其中吊杆力的多次张拉调整与精度控制尤为关键;所以,必须对吊杆的张拉调索方法进行科学的比选,以确定最终实施的吊杆张拉调索方法。
2 系杆拱吊杆的张拉调索及方法比选
一般,系杆拱桥的吊杆分两次张拉调索,第一次张拉是在吊杆安装后,主梁支架还未拆除之前,该阶段的力学状态相对复杂,整个结构体系为非线性的(状态非线性)。但是,考虑到吊杆在后续阶段还需继续张拉,因此通常情况下,假设一个张拉顺序按照设计张拉力输入到计算模型进行初步计算,主要考察吊杆张拉力和张拉顺序是否会对结构造成不利影响、应力是否在可控范围内;然后,再把试算后得到的吊杆力与张拉力的差值加到张拉力中再次进行试算;第一次张拉调索一般只试算两次。
吊杆第二次张拉调索,主梁支架已拆除,结构体系基本形成后,后续结构逐步施加阶段,此后结构的力学体系不会发生大的变化,而且结构处于线性状态。作为成桥前最后的张拉力调整,就要求吊杆的实际索力与目标索力值基本一致。结构落架以后,采用千斤顶与索力测试仪对吊杆进行索力张拉调整时,影响矩阵法得到了广泛的应用;并且,随着工程实践经验的不断积累,进行了有效的改进[2,3]。具体实施时,首先测定成桥后各吊杆的实际索力,记作[T0],同时与设计所要求的索力[T]进行比较,得出各根吊杆所需的索力调整值[ΔT],并根据以下计算公式可求出吊杆的张拉调整力:

式中:[A]为吊杆张拉力影响矩阵;[Ta]为吊杆的张拉调整力。求解方程(2)可得出需要调整的吊杆张拉力[Ta]。
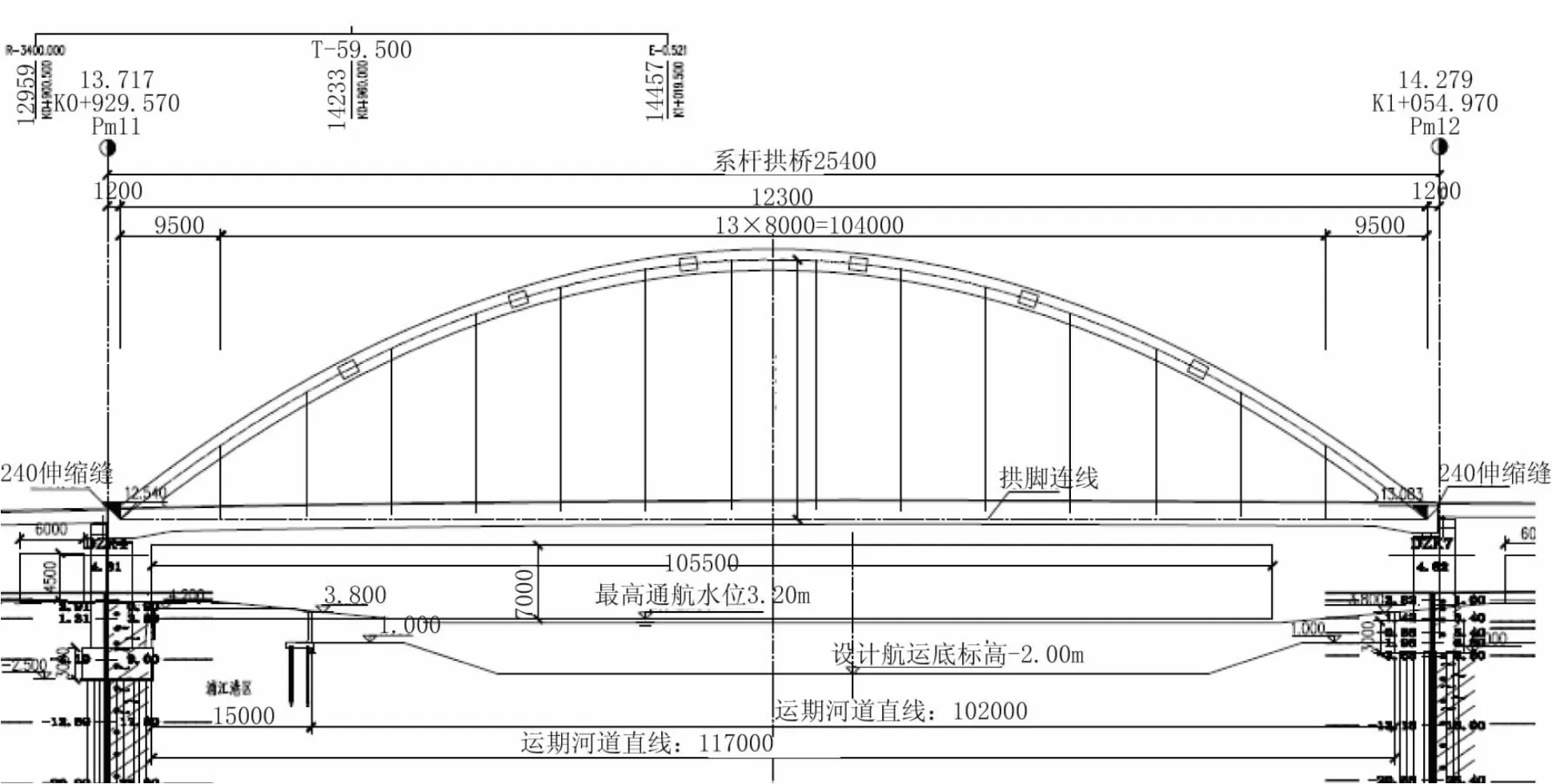
图1 主桥立面布置图(单位:cm)
从影响矩阵法调整张拉力的计算公式可以看出,虽然结构确定,影响矩阵[A]也确定,但实际吊杆张拉力调整施工中是分阶段进行的,也就是说[ΔT]在每个阶段是不同的。式(1)和式(2)相当于按照调整力将吊杆一次调整到位,但这在施工中无法做到,实际施工时一般是一次调整一对或几对,分次完成。
对于湖北码头桥来说,采用影响矩阵法进行吊杆张拉调索,施工时每次最多只能四根对称吊杆一起张拉,全桥28根吊杆需要多次张拉,施工过程中人为张拉误差等积累较多,根据实际索力测试结果可能需要多次调索计算,计算工作量非常大,且施工工期较长,施工过程需要来回拆装千斤顶,安全风险也较大。
近年来,计算机控制技术在桥梁工程中的应用越来越多,例如桥梁的同步顶升、同步顶推的工程实例也越来越多,同步张拉在系杆拱桥换索中的应用也有文献介绍。系杆拱桥吊杆的计算机控制同步张拉调索技术在工程中应用虽然不多,但其原理和同步顶升、同步顶推技术有共性,一般都是利用传感器通过计算机系统对千斤顶油压及其行程的控制,达到多个千斤顶按设定的目标值共同工作的目的。当然,在操作过程中,根据实际情况可进行人工干预操作。
根据吊杆张拉单位的一些类似工程的实践经验,湖北码头桥吊杆张拉若采用计算机控制的智能同步张拉调索技术,将有以下优点:
(1)全桥28根吊杆可以同时进行张拉调索,张拉速度快,施工天数可以缩小,且施工安全风险相比传统的吊杆张拉调索工艺大大降低;
(2)无需进行大量的吊杆张拉调整力的计算,直接以施工阶段设计张拉力为目标,张拉力控制准确,张拉过程中各吊杆力误差较小;
(3)张拉千斤顶压力传感器与伸长量传感器配合,张拉过程中张拉力与伸长量显示均比较直观,张拉过程智能化及可视化程度高,操作及控制方便;
(4)对主桥桥面标高的调整响应速度较快,以吊杆力调整标高较为方便;
(5)对张拉过程中出现的一些突变情况响应速度快;例如,张拉前后的温度突变,如果不采用智能同步张拉调索,则调整不能及时反应,传统的张拉调索方式只能增加调整的次数,延长施工时间。
综合上述,吊杆张拉调索方法的比较见表1。
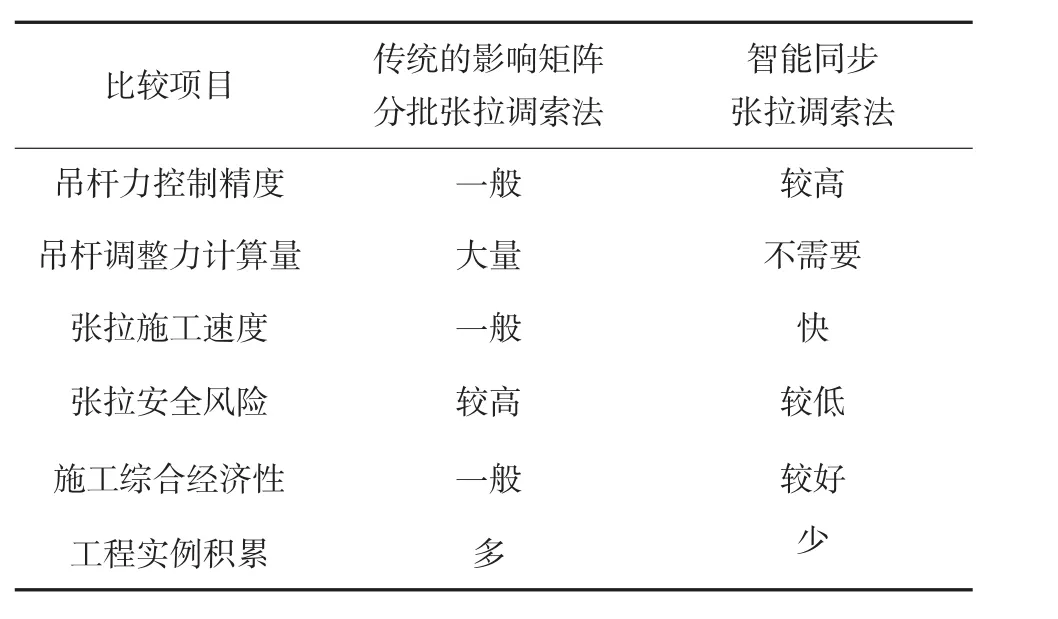
表1 吊杆张拉调索方法的比较
虽然吊杆智能同步张拉调索技术是一项新技术,在类似工程中的应用实例较少,但相比传统的吊杆张拉调索技术,其优势非常明显;所以,湖北码头桥系杆拱桥吊杆的张拉调索采用了智能同步张拉调索技术,这也响应了在桥梁建设中应用与推广新技术、新工艺的创新要求。
3 主桥吊杆的张拉调索实施过程
湖北码头桥主桥吊杆张拉调索采用全桥吊杆智能同步张拉调索技术,其吊杆张拉调索分两次实施,即第一次的初张拉与第二次的终张拉。
3.1 吊杆第一次张拉调索
吊杆第一次张拉调索的工况为主桥钢结构焊接安装完成,主梁支架未拆,拱肋支架已经脱架,吊杆安装完成时。
主桥吊杆于2016年3月8日进行第一次张拉调索,张拉时天气阴有小雨,气温11度。第一次张拉每根吊杆的理论值均为160 kN。张拉平均分四级进行加载,每次加载到位持荷20 min。张拉开始于早上9:30,从开始张拉到张拉到理论值用时约2 h;张拉到理论值之后,对桥面标高进行了测量,根据标高测量结果分析,因标高调整及减少锚头回缩影响的需要对部分吊杆进行了超张拉,张拉最大值不超过195 kN。张拉完成后,对每根吊杆的螺母进行旋紧。旋紧后,千斤顶回油,施工监控对张拉后的标高及吊杆力进行了测试,整个张拉过程没有出现异常情况。主桥吊杆第一次张拉照片见图2。
3.2 吊杆第二次张拉调索

图2 湖北码头桥主桥吊杆第一次张拉照片
吊杆第二次张拉调索工况为主梁支架拆除,桥面混凝土桥面板铺装完成,湿接缝强度达到要求,水平系杆张拉后。
主桥吊杆第二次张拉调索开始于2016年5月4日下午3:00,张拉平均分四级进行加载,每次加载到位持荷20 min,下午6:00张拉到理论值。之后对桥面标高进行了测量,根据测量结果,对部分吊杆力进行了调整,此次张拉主要以标高控制为主,吊杆力控制为辅。因当天张拉到位后没有进行及时锚固,第二天气温突变,张拉力与桥面标高的目标值受影响,施工监控重新对计算模型中的温度参数进行了调整,对最终张拉力目标值也进行了调整,最终把吊杆力与桥面标高控制在一个合理范围内。
4 主桥的主要监控结果
湖北码头桥主桥的吊杆张拉调索采用计算机控制的智能同步张拉调索技术,主桥施工监控过程获得的一些主要结果与相应理论值的比较如下所述:
4.1 主桥结构考虑施工过程的总体分析模型
任何桥梁的施工监控均以桥梁结构理论分析得到的结果作为依据。一般,施工监控的结构分析以总体分析为基础,但在分析模型中必须正确模拟拟定的每一个或关键的施工步骤,以便正确得到实桥的理论分析结果。
湖北码头桥主桥采用少支架的施工方案,施工监控的结构模型就考虑了支架的模拟。主桥结构施工过程的分析模型采用大型通用结构分析软件Midas建立,结构模型见图3。
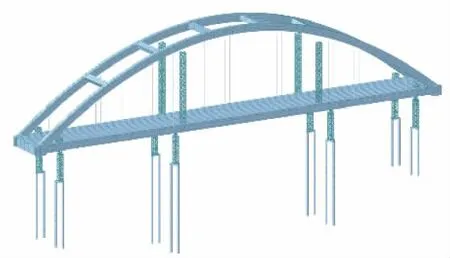
图3 主桥结构施工过程的总体分析模型
在图3的结构模型中,总共划分大约1 800个左右的单元,其中,吊杆采用桁架单元,桥面板采用板单元,其它结构构件采用梁单元。
在具体的计算分析过程中,根据施工步骤,利用Midas的单元激活与钝化功能模拟各个施工过程,并施加各个施工阶段的施工荷载;模型总共划分了11个施工阶段。
4.2 一些主要的监控结果
由于文章篇幅所限,这里以吊杆第二次张拉调索得到的主桥监控结果为例,将监控得到的实测结果与相应的理论值进行比较,以验证湖北码头桥主桥吊杆采用计算机控制的智能同步张拉调索技术的有效性。
吊杆第二次张拉调索后,主桥各根吊杆的实测值与理论值的比较见表2;主桥桥面实测值与理论值的比较见表3。
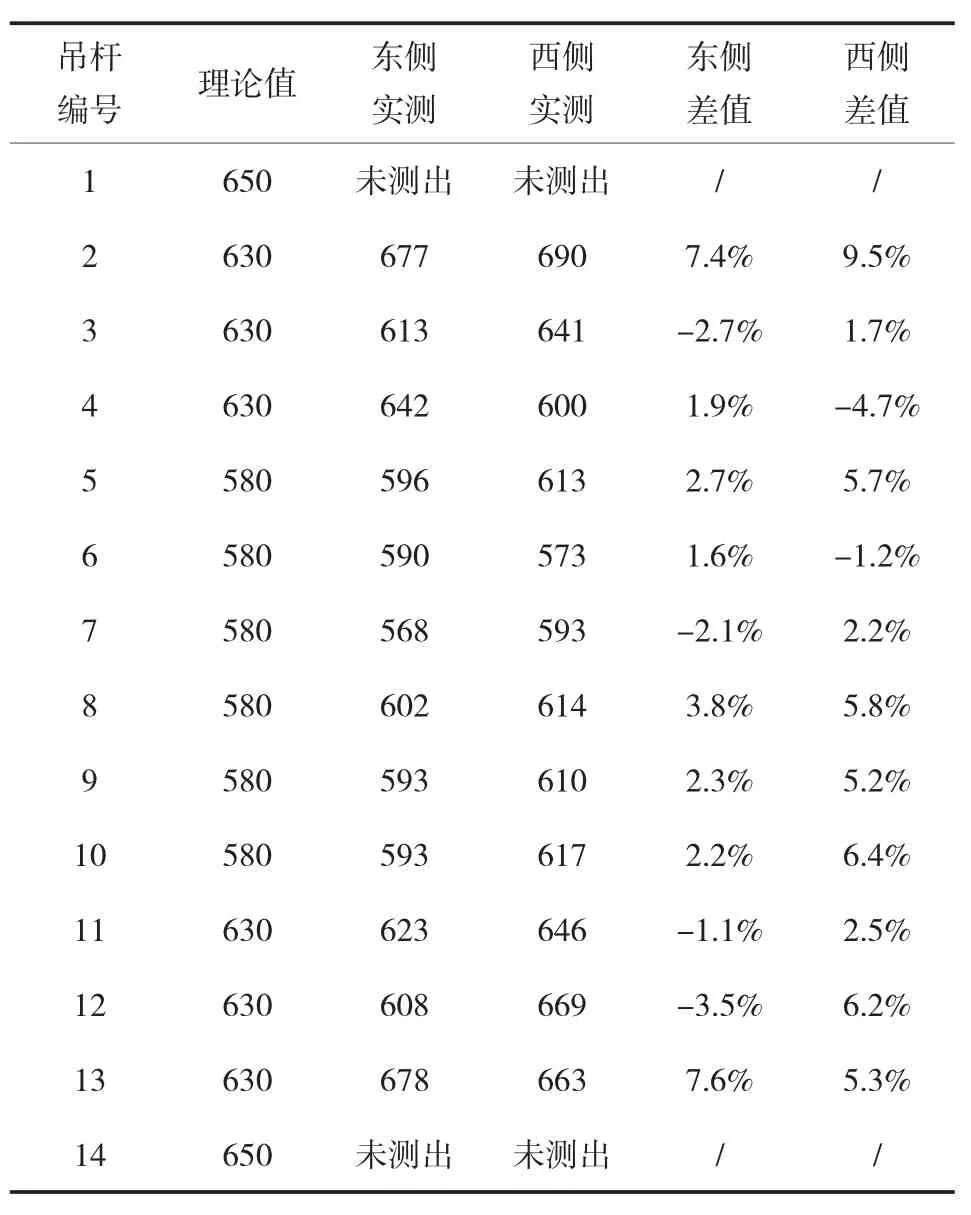
表2 吊杆第二次张拉调索后的吊杆力 kN
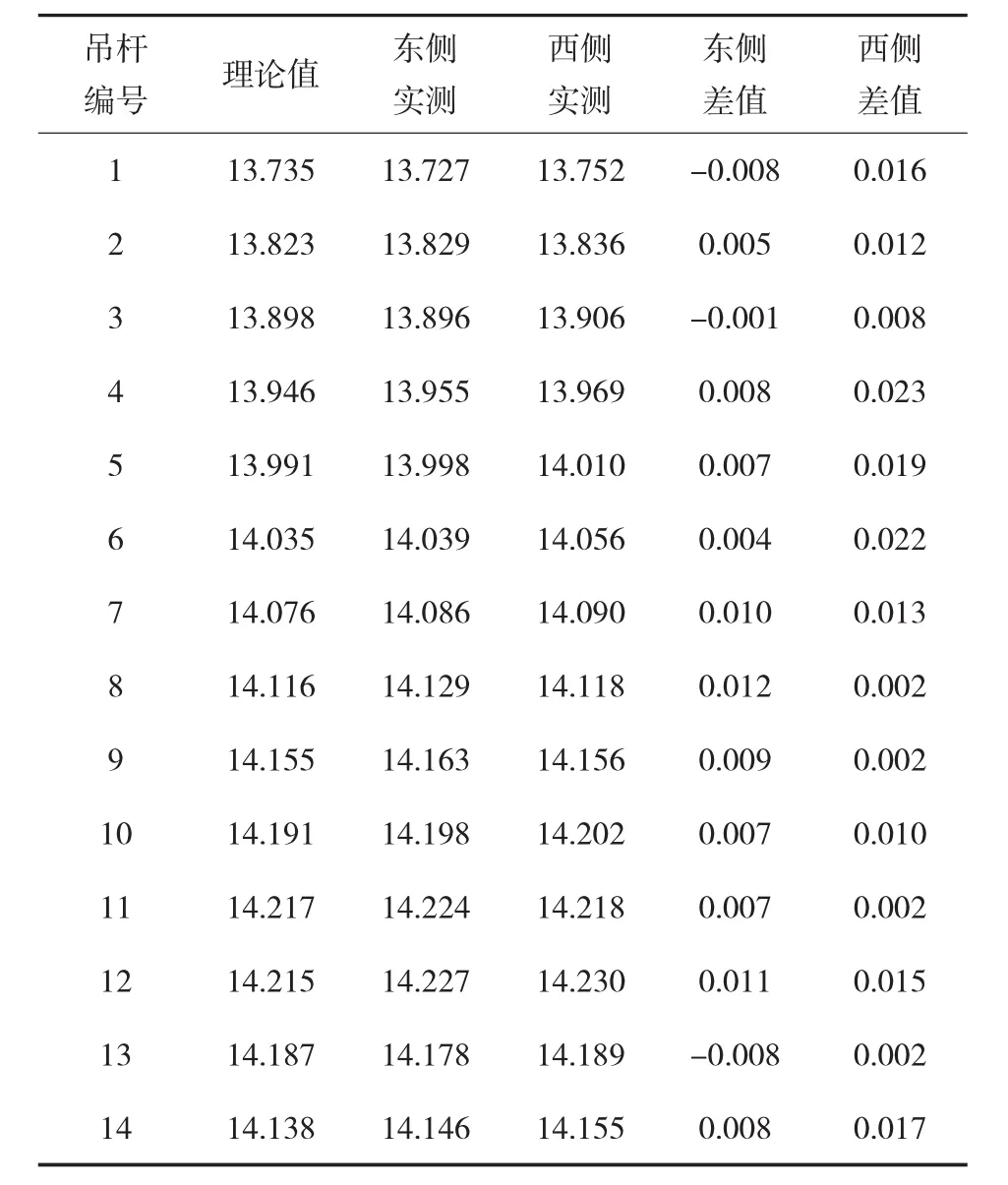
表3 吊杆第二次张拉调索后的桥面标高 m
表2、表3中,吊杆的编号从小里程到大里程依次编号;表中理论值由4.1节所述的结构总体分析模型计算得到;表2中,1号、14号吊杆为全桥最短吊杆,采用环境随机振动法测试吊杆,受长度的限制,振动不明显,吊杆力无法测出。
由表2中的数据可以得到,与理论计算得到的目标索力相比,近跨中吊杆力误差基本控制在6%以内,部分短吊杆因桥面标高调整的需要,对吊杆力进行了微调,最大差值9.5%,出现在西侧第二根吊杆。由表3中的数据可得,吊杆第二次张拉调索后,桥面标高与理论值相比,最大差值为0.023 m,出现在西侧第4号吊杆位置,其余各点差值均小于该值。
综上所述,主桥吊杆第二次张拉调索结束后,桥面板浇筑面标高误差控制在23 mm以下,吊杆力误差控制在10%以内,达到了施工监控精度控制的要求。
5 结语
目前,湖北码头桥主桥已经建成,成桥后的主桥照片见图4。

图4 建成后的湖北码头桥主桥照片
相比传统的吊杆张拉调索方法,基于计算机控制的全桥智能同步张拉调索技术有十分明显的优势。湖北码头桥主桥施工监控吊杆张拉调索采用这种新工艺、新技术取得了成功,主桥吊杆力与桥面标高控制均达到了施工监控精度控制的要求,也缩短了施工时间,降低了吊杆张拉施工过程的安全风险,取得了一定的综合经济效益,并可为其它类似工程提供有价值的借鉴。
[1]方鸿,高琼.影响矩阵法在系杆拱桥施工调索中的应用[J].中外公路,2014,34(6):146-148.
[2]邢煜,苗永慧.基于影响矩阵法的系杆拱桥合理成桥吊杆张拉力的确定[J].现代交通技术,2016,13(1):45-47.
[3]李杰,陈淮,江莹莹,等.钢管混凝土系杆拱桥吊杆力计算及调索方法研究[J].铁道建筑,2014(1):7-10.
[4]陈军,周松国,郑炜灵.系杆拱桥PLC同步张拉更换吊杆施工技术[J].城市道桥与防洪,2016(6):221-224.
U448.22+5
B
1009-7716(2017)01-0103-04
10.16799/j.cnki.csdqyfh.2017.01.030
2016-10-26
年福龙(1964-),男,安徽宿具人,高级工程师,从事工程项目管理工作。
