基于RBF神经网络的永磁同步电机速度PI-IP控制*
2017-02-15卢少武周凤星
周 佳,卢少武,周凤星
(武汉科技大学 信息科学与工程学院,武汉 430081)
基于RBF神经网络的永磁同步电机速度PI-IP控制*
周 佳,卢少武,周凤星
(武汉科技大学 信息科学与工程学院,武汉 430081)
针对PMSM伺服系统速度环PI和IP两种控制方式控制效果不佳的问题,提出一种基于RBF神经网络的伺服系统速度PI-IP控制参数自整定方法。该方法结合RBF神经网和PI-IP复合控制二者的优点,构造了基于RBF神经网络的速度PI-IP控制器,对速度环控制参数进行整定,改善常规PI和IP两种控制器的控制效果,最后通过仿真实验进行了验证。仿真结果表明:与常规PI和IP两种控制方法相比,该方法能有效减小速度超调,抑制扰动,用该方法设计的伺服系统具有良好的跟踪给定性能和较强的抗负载转矩扰动能力。
伺服系统;永磁同步电机;RBF神经网络;PI-IP参数整定
0 引言
以永磁同步电机为代表的伺服控制系统在越来越多的领域得到广泛应用,人们对电机的控制性能也提出了更高要求。速度环作为交流伺服系统中非常重要的一个环节,其控制参数的好坏直接影响到伺服系统的控制性能。为获得满意的伺服系统控制性能,需要对速度环设置的制参数进行整定[1]。
常规速度PI控制方法超调量容易过大,受逆变器驱动电压、电机电流等限制,当速度阶跃给定较大时,控制器积分饱和会产生windup现象[2-3]。常规速度IP控制方法存在跟踪响应慢、整定效率低的问题,不能较好的满足系统性能要求[4]。文献[5]提出一种将评价函数IITAE和坐标轮换法结合的算法来整定PI控制参数,但存在优化时间过长的问题。PI-IP复合控制器综合了PI和IP两种控制器的优点,结构简单,性能优异。
近年来,神经网络逐渐应用到伺服系统控制研究中。径向基函数(RBF-Radial Basis Function)神经网络能以任意精度逼近任意连续函数,是一种局部逼近的神经网络[6-7]。本文以永磁同步电机伺服系统速度环为研究对象,将具有自学习和自适应能力的RBF神经网络引入到PI-IP复合控制器中,整定伺服系统速度控制参数,实现伺服系统速度环控制参数自动调节,进而使整定后的伺服系统具有优良的控制性能。最后通过仿真实验验证了该方法的有效性。
1 RBF神经网络的速度PI-IP控制
1.1 RBF神经网络
RBF网络是具有单隐层的三层前馈网络,由输入到输出的映射是非线性的,隐含层空间到输出空间的映射是线性的,可以在加快学习速度的同时并避免局部极小问题[8]。RBF神经网络结构如图1所示,由输入层、隐含层、输出层组成。

图1 RBF神经网络结构
辨识网络的输出为:

(1)
1.2RBF神经网络的速度PI-IP整定原理
在交流伺服系统三环控制中,速度环通常采用PI控制,PI控制具有响应快、迅速消除偏差的优点,但存在着超调量容易过大、抗干扰性弱的问题。由PI控制变形得到的IP控制作用灵活,具有抗干扰性强、鲁棒性好的特点,缺点是响应慢[9-10]。为了更好的结合和利用PI和IP两种控制的优点,本文中伺服系统速度环控制结构采用了带前馈因子的PI-IP复合控制器。
速度环PI-IP复合控制结构如图2所示。其中,α为前馈因子,可在0到1内连续变化,当α=1时为PI控制器,α=0时为IP控制器。
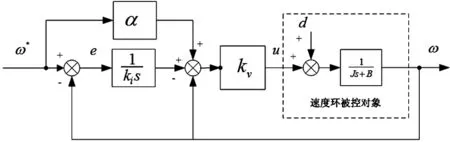
图2 速度环PI-IP控制框图
本文采用增量式PI-IP控制器,速度误差为:

(2)
PI-IP控制器的离散形式:

(3)
PI-IP控制算法:
(4)
令kvki为kvi,kvα为kvα,则得到:

(5)

PI-IP三项项输入为:
(6)
伺服系统速度环控制指标为:
(7)
采用梯度下降法可得到kv,kvi,kvα的调整量:
(8)
利用RBF神经网络的非线性隐射能力在线辨识被控对象的数学模型,作为辨识器跟踪对象变化,为控制器提供系统所需的Jacobian信息,从而通过整定算法实时调节控制器参数。经过变形后得到的基于RBF神经网络的速度PI-IP控制系统结构如图3所示。

图3 RBF神经网络速度PI-IP控制框图
2 仿真实例
为了验证本文提出的基于RBF神经网络的伺服系统速度PI-IP控制方法相比常规PI和IP两种控制方法具有跟踪性能好、抗干扰性强的优点,将基于RBF神经网络的速度PI-IP控制方法和常规PI、IP两种控制方法进行仿真对比。伺服电机的相关参数如表1所示,伺服系统中被控对象特征参数变化如表2所示。根据表2中被控对象特征参数变化,可通过计算得到速度环被控对象近似模型。

表2 伺服系统被控对象特征参数变化


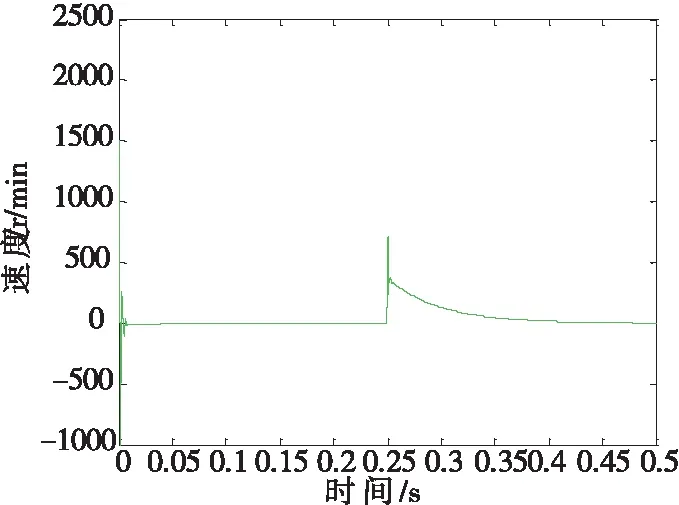
(a)速度阶跃响应

(b)速度跟踪误差图4 常规速度IP控制(α=0时)

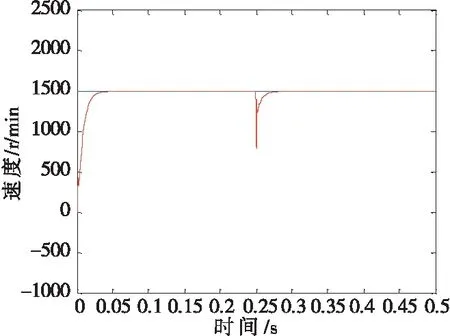
(a)速度阶跃响应
(b)速度跟踪误差图5 常规速度PI控制(α=1时)
(a)速度阶跃响应

(b)速度跟踪误差
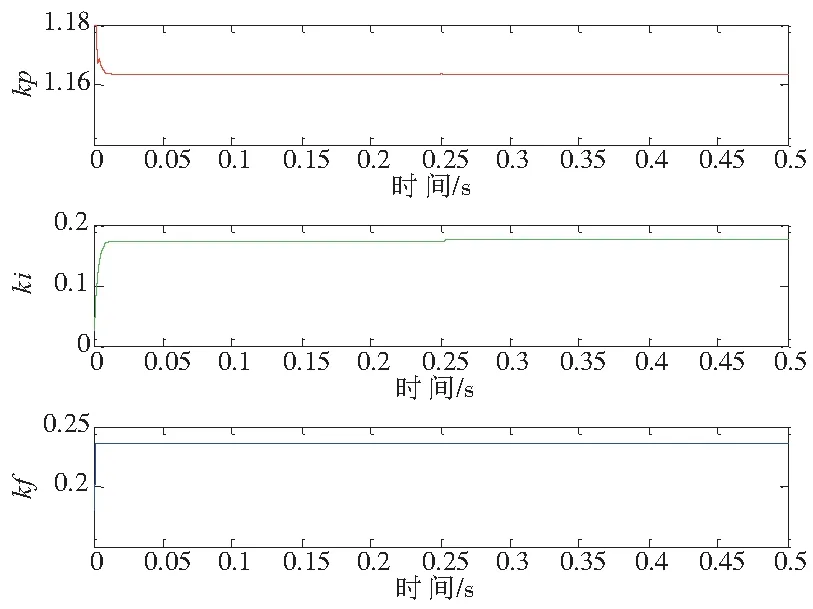
(c)控制参数自适应整定图6 RBF神经网络速度PI-IP控制
图4为常规速度IP控制,图5为常规速度PI控制,图6为RBF神经网络速度PI-IP控制。由图4~图6可以看出,在对阶跃信号的跟踪上,在0~0.25s期间,伺服系统空载时,常规PI控制方法出现超调和震荡,而基于RBF神经网络的速度PI-IP控制方法的响应速度要明显快于常规IP控制方法,同时其跟踪误差达到0的时间比常规IP控制方法跟踪误差达到0的时间更短;在0.25s~0.5s期间,对伺服系统施加负载时,与常规速度PI和IP控制方法相比,基于RBF神经网络的速度PI-IP控制方法响应速度更快,跟踪误差达到0的时间更短,并具有一定的抗干扰能力。由此可以看出,采用基于RBF神经网络的速度PI-IP控制方法较速度PI和IP两种控制方法而言,跟踪给定性能更好,抗干扰能力更强,伺服系统具有更好的控制效果。
3 结束语
本文以永磁同步电机伺服系统速度环为研究对象,采用基于RBF神经网络的PI-IP控制器对伺服系统速度环控制参数进行整定,实现速度环参数自动调节。仿真结果表明,基于RBF神经网络的伺服系统速度PI-IP控制方法稳定有效,具有良好的跟踪给定性能和较强的抗负载转矩扰动能力,可以明显改善常规PI和IP两种控制效果。
[1] 郑世祺, 唐小琦, 卢少武, 等.PMSM伺服系统参数自整定研究[J]. 电气传动, 2013, 43(3): 10-13.
[2]CHOIJW,LEESC.Anti-windupstrategyforPI-typespeedcontroller[J].IEEETransactionsonIndustrialElectronics, 2009, 56(6): 2039-2046.
[3] 王宏佳, 杨明, 牛里, 等. 永磁交流伺服系统速度控制器优化设计方法[J]. 电机与控制学报, 2012, 16(2): 25-31.
[4] 肖启明, 杨明, 刘可述, 等. PMSM伺服系统速度环PI控制器参数自整定及优化[J]. 电机与控制学报, 2014, 18(2): 102-107.
[5] 陈鹏展, 唐小琦.基于IITAE评价指标的交流伺服系统参数自动整定研究[J]. 微电机,2010, 43(2): 70-73.
[6] 徐庆宏, 戴先中. 基于在线学习RBF神经网络的汽门开度自适应补偿控制方法[J]. 电机与控制学报, 2010, 14(2): 13-19.
[7] 强勇, 凌有铸, 贾冕茜. 基于RBF神经网络的永磁同步电机速度控制[J]. 微电机, 2013, 46(4): 53-56.
[8] 刘金坤. 先进PID控制MATLAB仿真[M]. 3版.北京: 电子工业出版社, 2011.
[9] 郭新华, 温旭辉, 赵峰, 等. 基于电磁转矩反馈补偿的 永磁同步电机新型IP速度控制器[J]. 中国电机工程学报, 2010, 30(27): 7-13.
[10] 郑伟峰. 交流伺服系统无时滞反馈高响应驱动控制研究[D]. 哈尔滨:哈尔滨工业大学, 2010.
(编辑 李秀敏)
Speed PI-IP Control of PMSM Based on RBF Neural Network
ZHOU Jia, LU Shao-wu, ZHOU Feng-xing
(College of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081,China)
Aiming at the problem that the control method of speed loop PI and IP of PMSM servo system is not good enough, this paper presents a speed PI-IP control parameters auto-tuning algorithm of servo system based on RBF neural network. A speed PI-IP controller based on RBF neural network was designed through combining the advantages of RBF neural network and PI-IP composite control. The control effect of traditional PI and IP controller was improved by setting speed loop control parameters. It is verified through simulation finally. The simulation results show that, compared with traditional PI and IP control algorithm, the proposed algorithm can effectively reduce the speed overshoot, control interference. The servo system designed by this algorithm has good tracking performance and strong anti interference capability of load torque.
servo system; PMSM; RBF neural network; PI-IP parameter tuning
1001-2265(2017)01-0116-03
10.13462/j.cnki.mmtamt.2017.01.032
2016-04-11;
2016-04-28
国家自然科学基金项目(51405349)
周佳(1990—),男,湖北黄冈人,武汉科技大学硕士研究生,研究方向为伺服控制器和嵌入式,(E-mail)598308367@qq.com。
TH166;TG506
A
