仿生柱状黏附材料
2017-02-14薛龙建
汪 鑫,李 倩,薛龙建
(武汉大学动力与机械学院,湖北 武汉 430072)
青年园地
仿生柱状黏附材料
汪 鑫,李 倩,薛龙建
(武汉大学动力与机械学院,湖北 武汉 430072)
自然界中很多动物,如壁虎、甲虫和树蛙等,主要利用可逆的黏附力在各种表面爬行。研究发现这些动物脚趾上的特殊微纳柱状结构(刚毛、平滑结构等)起到了至关重要的作用。一方面,这些微纳柱状结构及其精细亚结构保证了动物脚趾能与接触表面形成很多有效接触点,从而形成足够强的黏附力。产生的黏附力甚至可达动物体重的200倍。另一方面,这些微纳结构又可以保证动物能从黏附的表面迅速脱离。这种黏附能力依赖于结构而非接触材料的表面化学组成的特性,具有极高的科研价值和应用前景。
仿生材料;干态黏附;湿态黏附;摩擦;柱状阵列;聚合物;壁虎
1 前 言
地球上的生物经过漫长的自然选择或随机的遗传漂变过程,通过进化,表现出对栖息环境优异的适应性。人类学习生物特性及机理,并将其应用于科技创新,极大地促进了社会的进步,这也就是仿生学的基本概念。如今,仿生学成果已经在体育、工业、建筑、医疗以及航空航天等领域被广泛应用,使我们在模仿自然之美的同时,获得了性能与效率的多重提升。
仿生黏附力学是仿生摩擦学的重要组成部分,通过研究生物体系中优异黏附性能的机制、几何结构与材料以及它们之间相互联系的规律,从而研制、发展和提高人造黏附材料性能[1]。自然界中,昆虫、蜘蛛、树蛙和蜥蜴等生物可以在不同环境(干、湿)、各种固体表面以及不同角度上保持快速移动,即可以在固体表面产生牢固的附着和轻易快速的分离。研究表明,这些动物主要通过脚趾的可逆黏附力而非爪子的抓合力来爬行[2],其脚趾上的精细微纳刚毛或平滑结构起着决定性作用[3, 4]。国内外研究学者基于对这些动物黏附器官的形态结构、黏附机理、以及运动模式[5-7]的深入理解,模仿获得了多种性能优异的仿生柱状黏附材料[8-10]。
2 干态柱状黏附材料
2.1 刚毛黏附机理
Labonte等[11]研究了225种爬行动物(体重跨越7个数量级)的黏附垫结构,发现这些动物黏附垫的面积与体重成正比关系。而通过对比甲虫、蜘蛛、苍蝇和壁虎等动物黏附垫上的微纳米刚毛结构, Arzt等[3]发现刚毛结构的尺寸与动物的体重成反比,即越重的物种具有更精细、更高密度的刚毛结构(如图1)。其中,壁虎体重最大,获得了广泛而深入的研究[12-15],它优异的黏附性能主要来源于脚趾上精细的刚毛结构。

图1 不同动物的刚毛末端结构(圆圈内)。动物体重越大,其刚毛结构越精细[3]Fig.1 Contact tips (in circles) of adhesive setae of different animals. The heavier the animal is, the finer the adhesive setae is[3]
壁虎脚趾上具有15~20片薄层结构,这些片层连着长度为30~130 μm,直径约5~10 μm的刚毛结构;每根刚毛又分枝出具抹刀状末端的次级刚毛结构,这些次级刚毛长度为2~3 μm,直径仅有200~300 nm,抹刀状末端厚度在5~20 nm。Autumn等[16, 17]首次测得单根刚毛的黏附力约为0.1 N/mm2;并且证实壁虎的黏附力主要来源于范德华力。由于接触界面不存在液体,此类黏附也被称为干态黏附。亦有研究表明静电作用力[18]和真空压力[19, 20]对壁虎黏附力也存在一定贡献。虽然有研究表明在湿度环境下,壁虎的黏附存在一定差异[21],且不同接触材料的润湿程度也会影响壁虎的黏附力[22],但壁虎脚的黏附力主要由范德华力贡献。有研究指出,壁虎刚毛黏附性对湿度的依赖性主要是因为刚毛在相对湿润的环境中被软化,从而提高了黏附性[23]。对这些动物黏附机理的深刻认识指导着仿生黏附材料的选材、形态设计以及制备[24]。
2.2 柱状黏附材料的制备方法与原料选择
柱状黏附材料的阵列结构可以通过“自上而下”和“自下而上”两大类途径获得。“自上而下”是通过物理或化学的方法,在基体上获得微小精细的结构。这类方法主要包括光刻技术、电子束刻蚀等。Geim等[25]利用氧等离子体刻蚀出聚酰亚胺柱状阵列结构(直径0.2~4 μm,高0.15~2 μm),获得了很好的黏附效果(如图2a)。
“自下而上”技术主要是将材料填充到预先设计好的模板中,然后脱模,即可获得具有各种结构参数(末端结构、长径比、倾斜角度)的柱状阵列。模板制作方法很多,如光刻技术、微纳米压印技术、激光剥蚀金属表面和电子束技术等。若材料顺利脱模,模板便可以重复利用,从而保证了材料制作的可重现性,有利于大规模生产过程。Greiner等[26]利用光刻模板,通过软印刷技术制备出一系列具有不同长径比(AR)的微米级聚二甲基硅氧烷(PDMS)柱状阵列(如图2b)。自从Steinhart等[27]开始使用多孔阳极氧化铝(AAO)模板制备纳米管阵列,这种模板材料被广泛使用,通过AAO可以制备得到直径在40~400 nm,高度可达上百微米的柱状或管状阵列结构[28, 29]。例如,将聚苯乙烯(PS)填充至AAO中,再通过简单的机械成形可获得具有平面形、足形以及薄饼形末端的纳米柱状阵列[30](如图2c~2e)。 Li等[31]通过简单的电沉积制备出了多孔氧化镍模板,并用PDMS为原料,方便、可重复地获得了多级柱状阵列结构。Li等[32]研究发现黑鲤鱼的牙本质具有天然的微管状结构,并以此为模板获得了微米柱状和管状阵列,也具有良好的黏附效果,这不失为模板选择、获取的一种新方向。

图2 以不同原料和技术制备的柱状阵列结构:(a)氧等离子体蚀刻得到的聚酰亚胺纳米柱阵列[25],(b)软印刷技术制备的PDMS微米柱阵列[26],(c)~(e)AAO模板制备的具平面形、薄饼形和足形末端结构PS阵列[30],(f)用热压法和PUA模板制备出的PMMA阵列[39],(g)高AR的VA-CNT阵列[41] Fig.2 Pillar arrays prepared by different technologies and materials: (a) polyimide nanorod array prepared by oxygen plasma etching[25], (b) PDMS micropillar array prepared by soft lithography[26], (c)~(e) PS nanopillar arrays with flat,pancake-like and foot-like tips replicated from AAO template[30],(f) PMMA nanofibrils replicated from PUA mold by hot-embossing[39], (g) VA-CNT arrays with high AR[41]
在提升制备技术的同时,为增加黏附效果,柱状阵列原材料的选择也在进一步拓宽[33, 34]。通过PDMS制备出的柱状阵列,由于原料价格便宜,制备简单,结构尺寸可控性好、完整性强,被广泛应用于黏附性能参数的研究[35, 36]。但在制备过程中PDMS聚合不彻底,产生的未交联单体和低聚物会在接触过程从材料内部转移至接触面,影响材料的黏附性能[35, 37]。另外, PMDS的弹性模量较低,随着其AR的增加,脱模过程中容易出现断裂,且由于阵列结构刚度的进一步下降,容易发生塌陷[38],难以获得高AR阵列。使用具有更高模量的材料或不同的模具可以有效地改善这种情况。例如,聚氨酯丙烯酸树脂(PUA)在具有较高弹性模量(~40 MPa)的同时兼顾柔韧性,以其为模具,可以用来制备AR大于20的聚甲基丙烯酸甲酯(PMMA)和PS柱状阵列结构[39](如图2f)。聚四氟乙烯(如Teflon AF)可以制备具有高AR、高密度的多级柱状阵列,这种阵列有效降低了自粘黏现象,表面能低,在水相中仍然可以保持~70%的干态黏附强度[40]。碳纳米管(CNTs)的高强度使其能形成极高AR(直径2~30 nm,长可至数百微米)的柱状结构(如图2g)[41]。具有卷曲缠绕末端的垂直碳纳米管(VA-CNT)阵列,其宏观黏附力可以达到~100 N/cm2,几乎是壁虎黏附力的10倍[42]。这是因为卷曲末端在剪切过程中与接触表面紧密接触并沿着剪切方向取向,同时整个CNT也会沿剪切方向倾斜,从而获得更多的有效接触,提高了黏附性能。而CNTs的高导热率和温度稳定性[43]可提供阵列大跨度温度使用区间;优异的电性能和电化学性能则为制备导电黏附材料提供可能[44, 45]。
2.3 柱状黏附材料的亚结构
2.3.1 柱状黏附材料的末端结构
动物的刚毛末端并非千篇一律,而是具有多种三维结构,这对适应不同的栖息环境起到了十分重要的作用[46]。例如,许多动物如苍蝇、甲虫和壁虎等的刚毛末端呈现出抹刀形(如图1),且从抹刀形根部到末端逐渐变薄,使刚毛末端与基底接触时的刚度降低,有利于增加有效接触面积[47]。
仿生柱状材料三维末端结构的制备可以分为模具直接塑造和后期处理成形两类。前者通过设计好模板,直接覆模塑造获得诸如楔形[48]、蘑菇形、平面形以及凹面[49]等末端结构(如图3)。例如,Wang等[50]选择性曝光正光刻胶薄膜的顶部和底部获得模板,直接脱模制备得到了结构完整的蘑菇形末端柱状阵列(如图3b),通过控制曝光角度和选择衬底,还可以对阵列层级结构和倾斜角度进行控制。这种脱模成形的方法,模板制备复杂,且往往只适用于PDMS这类模量较低的材料。

图3 直接成形得到的不同末端结构:(a)楔形[48],(b)蘑菇形[50],(c)~(d)平面形和凹面形[49] Fig.3 Different tips end by direct molding: (a) wedge-like tips[48], (b) mushroom-like tips[50], (c)~(d) flat tips and concave tips[49]
相对来说,后期处理成形则更加简单,适用面更广。例如,通过墨印技术(IPC)将PDMS前驱体转移到PDMS阵列末端,在重力或机械力作用下,可获得具有平面、半球形、蘑菇形以及抹刀形末端的多种阵列结构(如图4)[51]。Murphy等[52, 53]使用类似的方法对带有倾角的聚氨酯(PU)柱状阵列进行墨印处理,与水平面接触时保持一定压力并固化PU“墨水”,成功获得了与微柱具有0~90°倾角的蘑菇形末端结构。我们利用冷压、热压和剪切的后处理技术首次获得了类似壁虎黏附刚毛尺寸的具有多种末端结构的PS纳米柱阵列(图2b~2d)[30]。在具有蘑菇形末端的PS纳米柱阵列中检测到高于壁虎脚2倍多的黏附力,且发现黏附力对负载存在着依赖性。通过假设每根纳米柱为单独的弹簧,且其与基底的接触几率正比于负载(弹簧接触几率模型[30]),可对黏附力的负载依赖性进行很好的拟合。

图4 后期成形得到的不同末端结构:(a)半球形,(b)平面,(c)蘑菇形,(d)抹刀形[51] Fig.4 Different tips end by postshaping: (a) hemispherical tips, (b) flat tips, (c) mushroom-like tips, (d) spatular tips[51]
末端结构对柱状阵列的黏附性能有着显著的影响。通过对比具有平面、圆角平面、半球形、抹刀形、蘑菇形、凹面末端结构的PDMS微米柱阵列发现:抹刀形和蘑菇形末端具有更优异的黏附性能,且黏附力有望通过减小微米柱尺寸得到进一步提高[49]。具有蘑菇形末端的柱状阵列具有最好的黏附性能是因为:蘑菇形扩展出的薄边结构可以包覆较小的灰尘颗粒(较大的灰尘则会滑入纳米柱之间的间隙),能很好地适应基体的粗糙度[54],从而保证有效接触的形成;薄边结构可以有效地降低应力集中,减少和阻止接触面之间裂纹的形成和发展[55];接触界面分离倾向于从蘑菇形末端的中心向四周传递(平面末端结构的分离从边缘向中心传递),因而可以在张力作用下形成微小的真空腔,产生额外的真空吸力(可达总黏附力的10%),提高黏附力[55, 56]。
末端结构的非对称性则可以使柱状阵列形成各向异性的黏附行为。例如,Sameoto等[57]通过精密控制,使得阵列的薄方形末端偏离支持柱的中心,即末端结构偏向于支持柱的一侧。通过这种方法获得的非对称末端结构,沿长边和短边的剪切剥离力是不同的,获得了各向异性的黏附。非对称抹刀形结构具有类似的性能[58],我们通过墨印法获得了抹刀形末端结构阵列,发现抹刀形结构在顺着抹刀方向上主要贡献于静摩擦,而在相反方向上则主要贡献于动摩擦,表现出摩擦的各向异性[59](如图5a和5b)。Jin等[60]基于倾斜的三角棱柱阵列,在其末端的一侧制备了矩形薄片的二级结构(如图5c)。在垂直于矩形薄片的方向上表现出不同大小的黏附力,获得了抓紧和释放的可调黏附。Tamelier等[61]通过光刻模板复制获得了PDMS的半圆柱状阵列,发现沿直边方向的剪切黏附力可以达到沿圆边方向剪切力的2~5倍,验证了阵列末端结构在剪切过程中对黏附性能的影响(如图5d)。

图5 (a)~(b)抹刀形末端[58,59], (c)薄方形末端[60], (d)半圆形末端[61] Fig.5 (a)~(b) spatular-like tips[58,59], (c) thin rectangular tips[60] and (d) half-circle tips[61]
2.3.2柱状黏附材料的倾斜结构
壁虎脚趾上的刚毛结构并不是垂直于支撑它的片层结构,而是向趾尖方向倾斜一定角度(如图6a)。在自然情况下沿脚趾表面的法向方向并不能检测到黏附力,而沿趾尖方向的剪切会使刚毛末端沿接触表面取向,极大地增加接触面积,产生很强的黏附效果。如Tokay壁虎合适取向的单根刚毛即可以产生200 μN的剪切力和40 μN的法向附着力,比承载体重所需的单根刚毛黏附力高出3个数量级[62]。而沿相反方向时,刚毛与基体表面的黏附力很小,其倾角在30°以上时即可完全脱附[63],表现出优异的黏附各向异性。此外,壁虎等动物倾斜的刚毛结构可以减少有效弹性模量,增加对基体表面粗糙结构的适应性。另一方面,由于倾斜刚毛的弯曲失效比垂直刚毛的屈曲失效产生的疲劳程度低,有利于保持刚毛结构的稳定性。
Aksak等[64]通过曝光倾斜放置的负光刻胶SU-8获得了具有不同倾角的高AR(~10)柱状阵列(如图6b)。Jin等[65]通过部分固化PDMS后施加横向剪切力获得了具有不同斜角(60~90°)的PDMS模板,并用其制备出了结构完整的PU阵列。Reddy等[66]以形状记忆热塑性嵌段共聚物为原料,通过软印刷技术得到了垂直柱状阵列材料。当阵列材料受热温度高于Ttrans1= 51 ℃而低于Ttrans2= 120~140 ℃时,阵列可以在剪切力的作用下获得不同角度的倾斜,并在温度低于Ttrans1时保持住倾斜结构。再次升温至Ttrans1以上则又可以恢复至初始的垂直状态,其黏附性能因而能够可逆调控(如图6c)。

图6 (a)壁虎脚趾上的倾斜刚毛结构的扫描电镜图片[62],(b)倾斜的SU-8柱状阵列[64], (c)倾斜PUA柱状阵列,70 ℃变形后冷却至Ttrans1以下定型[66]Fig.6 (a) SEM image of the slanted seta on gecko’s toe pad[62],(b) tilted SU-8 pillar array[64], (c) tilted PUA pillar array after deformation at 70 ℃ and fixation in the deformed state by cooling below Ttrans1[66]
Kim等[67]通过电子束辐照柱状阵列一侧使其收缩分解而朝着辐照方向弯曲,获得了具有高AR(~10)的PUA倾斜阵列。其倾斜角度可以通过辐照角度、加速电压以及曝光时间加以控制。该课题组还在垂直聚合物阵列一侧沉积上一层金属。在与基体表面接触时,附着金属层的一侧与聚合物相比黏附力相对较弱,获得了不对称黏附效果。另外,通过热退火或电子辐照,由于热膨胀系数的不同或是聚合物的分解会使聚合物柱子向一定方向弯曲,形成倾斜阵列[68]。
2.3.3 柱状黏附材料的多级结构
上文已经提到壁虎脚趾上具有抹刀状末端的多级纤维结构可以有效地提高其在粗糙表面的有效接触,保证它可以在几乎所有表面上的运动[69]。受此启发,多级阵列结构受到了人们的广泛关注。
常见的多级结构是在同一根柱子上存在不同尺寸的自相似柱状层级结构。例如上文提及的具有不同直径的二级柱状PU阵列[65](如图7a)。与其类似,Greiner等[70]利用两步光刻获得具有二级结构的模板,软印刷获得了PDMS的二级柱状阵列,但由于层级结构的不完整性,其黏附能力比单级结构略差。在多级结构的PU柱状阵列的每一层中引入蘑菇形末端(如图7b)[71],可以有效地增大接触面积以及减小有效模量,多级结构相对比无结构和单级结构柱状阵列表现出更高的黏附力,且在多次循环中黏附力几乎没有降低。AAO模板同样被用以制备具有层级结构的PS(如图7c)、热塑性聚碳酸酯(PC)等材料的柱状阵列,并表现出良好的黏附性能[72, 73]。
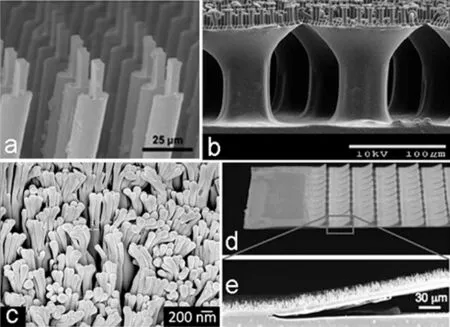
图7 不同的层级阵列: (a)PU 柱状阵列[65], (b)蘑菇状末端PU柱状阵列[71],(c)PC 纳米柱状阵列[72], (d) ~(e)HDPE叠层结构阵列[75]Fig.7 Different hierarchical pillar arrays: (a) PU pillar arrays[65], b) PU pillar arrays with mushroom-like tips[71], (c) PC nanopillar arrays[72], (d)~(e) HDPE nanopillar array supported by lamellar structures[75]
另一种多级结构是将柱状阵列建立在片层结构上。Northen等[74]利用大规模并行微机电系统(MEMS)加工技术,在高AR的单根硅柱上制成了一个二氧化硅方形平台结构(20~150 μm),并在平台上包覆了一层光刻技术得到的直径200 nm、长2 μm有机纳米柱阵列,形成了多层级结构。由于单晶硅柱子的脆性,限制了这种结构的应用。而Lee等[75]模仿壁虎脚片层和刚毛结构,通过加热辊和PC模板,制备出了高密度聚乙烯(HDPE)片层结构支撑的直径为600 nm,长18 μm的HDPE纳米柱阵列复合结构(如图7d和7e)。这种结构相对于拥有同样纳米柱阵列的平板黏附结构具有更好的粗糙基底适应性,其表面依从性是普通平板阵列的~160倍。
2.3.4 柱状黏附材料的响应性
随着干态柱状黏附材料发展的日益深入,人们已经不满足简单的追求高黏附力,而是要求材料具有一定的刺激相应性。例如,Ma等[76]通过化学改性的方法,在具有高AR的硅纳米纤维阵列上接枝了响应性聚合物聚3-磺丙基甲基丙烯酸酯钾(SPMA)和聚甲基丙烯酸钠(PMAA)组成的分子刷。分子刷对湿度和pH值具有响应性,可以发生收缩和膨胀,从而改变硅纳米纤维的有序性,达到可逆调控摩擦力的效果。Isla等[77]利用两步墨印法获得了具有两种不同高度的蘑菇状末端阵列,通过改变负载来调节阵列柱与基底的接触数量和程度,从而获得了对负载响应的三态黏附性能。
2.4 柱状黏附材料的应用举例
干态黏附材料由于良好的可重复性、可靠性和无残留等特点,在微电子、医疗、攀爬机器人、日用等领域均能发挥作用[78-80]。Zhou等[81]利用软印刷获得了具有蘑菇状末端的阵列材料,将其附在金属三脚支架的末端,通过收紧和释放支架结构,即可以轻松地控制黏附和脱粘。该装置只需要较低夹持压力,可以有效地拿起轻薄、易碎且具有光滑表面的材料(如硅片等)(如图8a)。Bae等[82]首先利用刚性相对较大的硬聚二甲基硅氧烷(h-PDMS,杨氏模量~8.2 MPa)或加入更多固化剂的原材料(杨氏模量~2.8 MPa)制备了具有蘑菇形末端结构的阵列,再通过墨印法使阵列末端附上一层较软的PDMS获得了生物相容性良好的复合微米柱黏附材料,可用作干性皮肤贴片。这种仿生贴片具有良好的黏附效果和可重复黏附性,不易表面污染、氧化或受到其他环境影响,适用于与皮肤的长期接触(如图8b)。Song[83]利用AAO模板,将PS和聚异丙基丙烯酰胺(PNIPAm)的混合材料制成的纳米柱状阵列作为纳米吸盘,在常温下表现出良好的亲水性和黏附力。但由于PNIPAm所具有的温度响应性,温度升高时纳米吸盘疏水性增强且黏附性降低。温度变化起到了精准、可逆调控其疏水性和黏附性能的作用(如图8c)。Menon等制备了具有优异攀爬性能的仿生机器人,如Abigaille-III[84](如图8d)和TBCP-II[85]等。由于使用仿生黏附材料,相较于使用吸盘、爪和磁铁做攀爬工具的机器人具有更好的表面适应性,可以在光滑、垂直且凹凸不平的表面进行爬行。

图8 干态柱状黏附材料的应用: (a)转运三角支架[81], (b)干态皮肤贴片[82] , (c)仿生机器人Abigaille-III[84] Fig.8 The applications of dry adhesive materials: (a) transfer three-legged clamp[81], (b) dry adhesive skin medical patch, (c) bio-inspired robot Abigaille-III[84]
3 湿态黏附材料
3.1 湿态黏附
与壁虎等不同的是,许多动物(甲虫、苍蝇、树蛙、蟋蟀、蟑螂等)的黏附器官和接触表面之间存在着液体。这些液体可以是动物自己分泌的,也可以是接触固体表面存在的液体。通过对这些黏附器官的研究,发现其上存在着两种不同的结构:刚毛结构和平滑结构,两者都有粘液分泌功能[86-88],而且不同动物分泌粘液的组分差别很大[89]。甲虫和苍蝇等昆虫通过处于如跗节处或刚毛末端的分泌孔排出粘液并输送至接触表面[86, 90](如图9),在表面形成粘液薄膜,而粘液的注入量可能是通过昆虫神经反馈机制进行调节[91]。粘液能够有效的增加昆虫在粗糙基体上的有效接触面积,提高黏附能力[92]。这也就决定了昆虫的黏附力可能是由范德华力、内聚力以及毛细作用力等多种物理作用力组成。

图9 (a)苍蝇(Episyrphus Balteatus)刚毛的多孔结构[86],(b)甲虫(Hemisphaerota Cyanea)刚毛的多孔结构,(c)甲虫足垫(与玻璃接触)[90] Fig.9 (a) Porous structure in the setae of fly (Episyrphus balteatus)[86],(b) porous structure in the setae of beetle (Hemisphaerota Cyanea),(c) bristle pads in contact with glass[90]
虽然也有粘液分泌,但树蛙、蟋蟀等动物的黏附足垫是由平滑结构组成的。平滑结构并非一个整体,而是由大量具有平面末端的微米多边形构成,且多边形之间间隔着沟道结构[93](如图10a)。以树蛙为例[4],其足垫上由五边形或六边形平面结构组成,这些多边形尺寸约20 μm,沟道约深5 μm、宽2~3 μm(如图10b~10d)。每个多边形结构是由密集排列的角蛋白纤维阵列(直径200~300 nm)组成;多边形之间的沟道彼此相连,密布足垫,并与粘液腺的导管相连,便于将分泌液扩散至足垫的整个表面。在一定程度上,这些平滑结构亦可以认为是一种AR很低(~0.25)的柱状结构。
树蛙等具有平滑结构动物的黏附机制相对复杂,迄今并没有确切的结论。现有研究表明,液体的存在对平滑结构的黏附过程起到了很重要的作用:当树蛙的足垫与潮湿表面接触时,多余的液体会顺着沟道排出,使足垫与接触面之间形成一层很薄的液体层,在压力的作用下可以获得很大的摩擦力。而洪流蛙等(栖息在河流或瀑布边)足垫上的六边形结构相对树蛙更为狭长,从而在相应取向上获得了更高的边缘密度和变形能力,有利于得到更高的黏附力[94],但其在干燥粗糙界面的黏附力很弱,在湿润的光滑界面上存在打滑现象[4]。
3.2 湿态黏附的柱状阵列
平滑结构的研究并不够深入,其仿生结构的研究仍处于早期阶段。平滑结构的AR很低,具有相对较高的有效弹性模量和稳定性,有利于获得高摩擦力。Drotlef等[95]利用光刻模板和软印刷技术,得到了几种仿树蛙足垫结构的多边形PDMS柱状阵列(如图11a)。在湿润条件下,黏附力主要由毛细作用提供,且随液体体积的增大而降低;低AR的柱状阵列在剪切力作用下不易发生弯曲和崩塌,可以有效地排出液体增加直接接触面积,从而相较于无结构表面获得更高的摩擦力;在非润湿条件下,微米柱状阵列结构对黏附效果影响很大:阵列与基体直接接触产生的黏附力超过毛细作用的影响,其作用规则与壁虎干态黏附相仿。

图10 蟋蟀和树蛙的足垫结构SEM 照片: (a)灌丛蟋蟀(Tettigonia Viridissima)不同尺度足垫结构[93], (b)~(d)树蛙(Litoria caerulea)不同尺度足垫结构, 单个多边形结构由致密纳米柱状阵列构成[4] Fig.10 SEM images of crickets’ and tree frogs’ toe pads: (a) the toe pad of bush cricket (Tettigonia Viridissima) in different scales[93], (b)~(d) the toe pad of tree frog (Litoria caerulea) in different scales, single polygonal structure is composed by dense array of nanopillars[4]
受昆虫粘液分泌的启发,本课题组[96]以嵌段共聚物聚(苯乙烯-b-2-乙烯基吡啶)(PS-b-P2VP)为原料,利用AAO模板制备出了含有纳米孔洞结构的纳米柱状阵列(如图11b)。这种纳米柱直径为300 nm,长1.5 μm,晶格周期为500 nm。当将多孔纳米柱阵列置于潮湿环境时,由于共聚物中的P2VP嵌段的吸水性,阵列的有效弹性模量与同样规格无孔纳米柱阵列相比急剧降低(90~96%),导致黏附力增强(可增至3倍)。干湿环境下黏附能力的差异因而可用来触发材料黏附性能的可逆调控。另外,液体可以从纳米柱内部孔洞转移至接触面上,使多孔纳米柱阵列的黏附从干态转为湿态,首次在人工结构中获得了类似于苍蝇、甲虫的黏附分泌功能。接触界面液体的出现使得黏附力提高一个数量级,并且在随后的重复测试中保持不变。

图11 (a)仿树蛙PDMS平滑结构[95],(b)仿昆虫PS-b-P2VP多孔纳米柱状阵列[96] Fig.11 (a) Tree frog-inspired PDMS smooth pad[95], (b) insect-inspired PS-b-P2VP porous nanofibrillar array[96]
3.3 湿态黏附的应用
Tsipenyuk等[97]利用平滑结构中的六边形纹理可以有效地定向调控黏附-脱粘过程以及摩擦力的特点,制备出具有多种六边形结构的聚乙烯基硅氧烷(PVS)阵列结构,并将其作为拉伸单元(Stretching Unit)使用于一次性安全剃须刀上(如图12a)。具有这种阵列结构的剃须刀在滑动剃须过程中,可以通过沟道排出多余的液体,提高与皮肤的有效接触面积,从而提高摩擦力(可至商用产品的2倍),更好地拉伸润湿的皮肤。Chen等[98]仿照平滑结构的特点,制备了多种多边形PDMS阵列,并应用于外科夹具的夹取面上。通过对六边形结构夹具与齿状纹理的现代外科夹具比较,具有平滑结构的夹具可以在有效夹住湿滑软组织的同时减小夹取力度,从而减少被夹取组织的变形,有效降低对组织的损伤(如图12b)。

图12 (a)PVS平滑黏附结构应用于安全剃须刀的示意图[97],(b)外科夹具夹取面上的PDMS平滑结构及其(c)以10牛压力在新鲜猪肝上的夹[98]Fig.12 (a) Schematic of PVS smooth adhesive pad used in safety razors[97], (b) PDMS smooth adhesive pad on the surface of surgical grasper and the trail left on fresh pig liver with 10 N pressure[98]
4 结 语
随着对生物黏附认识程度的逐渐加深和现代制备技术的进步,仿生柱状黏附材料取得了较大发展。各种优秀的仿生黏附材料已经被设计研发出来,并开始应用于日常生产生活。虽然这些材料具有良好的黏附性能,甚至在一定程度上可以超过其生物模型,但仍有许多方面难以达到生物水平:对不可预测或肮脏表面的黏附效果不佳、易剥离、自清洁效果差、长期耐久性需要提高等。相信随着我们对生物黏附结构的进一步深入理解,仿生柱状黏附材料必将获得更快的发展,也必将获得更多更广泛的应用。
致谢 感谢中组部“青年千人”计划以及自然科学基金委青年项目(51503156,51611530546)的资助。
References
[1] Dai Zhendong (戴振东), Tong Jing (佟 金), Ren Luqua (任露泉).ChineseScienceBulletin(科学通报)[J], 2006, 51(20): 2353-2359.
[2] Xue L, Steinhart M, Gorb S N.BiologicalandBioinspiredMicro-andNanostructuredAdhesives[M]. Weinheim, Germany: Wiley-VCH, 2013: 409-439.
[3] Arzt E, Gorb S, Spolenak R.ProceedingsoftheNationalAcademyofSciences[J], 2003, 100(19): 10603-10606.
[4] Scholz I, Barnes W J P, Smith J M,etal.JournalofExperimentalBiology[J], 2009, 212(2): 155-162.
[5] Li Y, Zhou J H, Zhang C,etal.ACSAppliedMaterials&Interfaces[J], 2015, 7(4): 2340-2348.
[6] Endlein T, Ji A, Samuel D,etal.JournaloftheRoyalSocietyInterface[J], 2013, 10(80): 20120838.
[7] Song Y, Dai Z, Wang Z,etal.ScientificReports[J], 2016,6:26219.
[8] Wang Z, Gu P, Wu X.PhysicalChemistryChemicalPhysics[J], 2013, 15(47): 20764-20770.
[9] Pang C, Kim S M, Rahmawan Y,etal.ACSAppliedMaterials&Interfaces[J], 2012, 4(8): 4225-4230.
[10]Liu K, Du J, Wu J,etal.Nanoscale[J], 2012, 4(3): 768-772.
[11]Labonte D, Clemente C J, Dittrich A,etal.ProceedingsoftheNationalAcademyofSciences[J], 2016, 113(5): 1297-1302.
[12]Loskill P, Puthoff J, Wilkinson M,etal.JournaloftheRoyalSocietyInterface[J], 2013, 10(78): 20120587.
[13]Tian Y, Pesika N, Zeng H,etal.ProceedingsoftheNationalAcademyofSciences[J], 2006, 103(51): 19320-19325.
[14]Zhou M, Pesika N, Zeng H,etal.JournaloftheRoyalSocietyInterface[J], 2012, 9(75): 2424-2436.
[15]Xu Q, Wan Y, Hu T S,etal.NatureCommunications[J], 2015, 6: 8949.
[16]Autumn K, Sitti M, Liang Y A,etal.ProceedingsoftheNationalAcademyofSciences[J], 2002, 99(19): 12252-12256.
[17]Autumn K, Liang Y A, Hsieh S T,etal.Nature[J], 2000, 405(6787): 681-685.
[18]Kovalev A E, Gorb S N.TribologyLetters[J], 2012, 48(1): 103-109.
[19]Heepe L, Kovalev A E, Filippov A E,etal.PhysicalReviewLetters[J], 2013, 111(10): 104301.
[20]Varenberg M, Gorb S.JournaloftheRoyalSocietyInterface[J], 2008, 5(20): 383-385.
[21]Stark A Y, Badge I, Wucinich N A,etal.ProceedingsoftheNationalAcademyofSciences[J], 2013, 110(16): 6340-6345.
[22]Stark A Y, Mcclung B, Niewiarowski P H,etal.IntegrativeandComparativeBiology[J], 2014, 54(6): 1026-1033.
[23]Puthoff J B, Prowse M S, Wilkinson M,etal.JournalofExperimentalBiology[J], 2010, 213(21): 3699-3704.
[24]Zhou M, Pesika N, Zeng H,etal.Friction[J], 2013, 1(2): 114-129.
[25]Geim A K, Dubonos S, Grigorieva I,etal.NatureMaterials[J], 2003, 2(7): 461-463.
[26]Greiner C, Del Campo A, Arzt E.Langmuir[J], 2007, 23(7): 3495-3502.
[27]Steinhart M, Wendorff J H, Greiner A,etal.Science[J], 2002, 296(5575): 1997-1997.
[28]Liu K, Du J, Wu J,etal.Nanoscale[J], 2012, 4(3): 768-772.
[29]Lee D Y, Lee D H, Lee S G,etal.SoftMatter[J], 2012, 8(18): 4905-4910.
[30]Xue L, Kovalev A, Thole F,etal.Langmuir[J], 2012, 28(29): 10781-10788.
[31]Zhang E, Liu Y, Yu J,etal.JMaterChemB[J], 2015, 3(32): 6571-6575.
[32]Li W, Liu X, Lu Y,etal.InternationalJournalofMolecularSciences[J], 2014, 15(9): 14909-14920.
[33]Mcdonald B, Shahsavan H, Zhao B.MacromolecularMaterialsandEngineering[J], 2014, 299(2): 237-247.
[34]Guo D J, Liu R, Cheng Y,etal.ACSAppliedMaterials&Interfaces[J], 2015, 7(9): 5480-5487.
[35]Xue L, Pham J T, Iturri J,etal.Langmuir[J], 2016, 32(10): 2428-2435.
[36]Khaderi S N, Fleck N A, Arzt E,etal.JournaloftheMechanicsandPhysicsofSolids[J], 2015, 75: 159-183.
[37]Xue L, Xing R, Han Y.TheJournalofPhysicalChemistryC[J], 2010, 114(21): 9845-9849.
[38]del Campo A, Arzt E.ChemicalReviews[J], 2008, 108(3): 911-945.
[39]Jeong H E, Lee S H, Kim P,etal.NanoLetters[J], 2006, 6(7): 1508-1513.
[40]Izadi H, Zhao B, Han Y,etal.JournalofPolymerSciencePartB:PolymerPhysics[J], 2012, 50(12): 846-851.
[41]Qu L, Dai L.AdvancedMaterials[J], 2007, 19(22): 3844-3849.
[42]Qu L, Dai L, Stone M,etal.Science[J], 2008, 322(5899): 238-242.
[43]Xu M, Futaba D N, Yamada T,etal.Science[J], 2010, 330(6009): 1364-1368.
[44]Hu S, Xia Z, Dai L.Nanoscale[J], 2013, 5(2): 475-486.
[45]Li Y, Zhang H, Yao Y,etal.RSCAdvances[J], 2015, 5(58): 46749-46759.
[46]Spolenak R, Gorb S, Gao H,etal.EffectsofContactShapeontheScalingofBiologicalAttachments[C]. London: Mathematical, Physical and Engineering Sciences, 2005.
[47]Varenberg M, Pugno N M, Gorb S N.SoftMatter[J], 2010, 6(14): 3269-3272.
[48]Jeong H E, Lee J K, Kim H N,etal.ProceedingsoftheNationalAcademyofSciences[J], 2009, 106(14): 5639-5644.
[49]del Campo A, Greiner C, Arzt E.Langmuir[J], 2007, 23(20): 10235-10243.
[50]Wang Y, Hu H, Shao J,etal.ACSAppliedMaterials&Interfaces[J], 2014, 6(4): 2213-2218.
[51]del Campo A, Greiner C, lvarez I,etal.AdvancedMaterials[J], 2007, 19(15): 1973-1977.
[52]Murphy M P, Aksak B, Sitti M.Small[J], 2009, 5(2): 170-175.
[53]Murphy M P, Aksak B, Sitti M.JournalofAdhesionScienceandTechnology[J], 2007, 21(12-13): 1281-1296.
[54]Tuma J, Peressadko A, Varenberg M,etal.JournalofTheRoyalSocietyInterface[J], 2007, 4(13): 271-275.
[55]Hui C Y, Glassmaker N J, Tang T,etal.JournaloftheRoyalSocietyInterface[J], 2004, 1(1): 35-48.
[56]Carbone G, Pierro E, Gorb S N.SoftMatter[J], 2011, 7(12): 5545.
[57]Sameoto D, Menon C.JournalofMicromechanicsandMicroengineering[J], 2009, 19(11): 115026.
[58]Seo S, Lee J, Kim K S,etal.ACSAppliedMaterials&Interfaces[J], 2014, 6(3): 1345-1350.
[59]Xue L, Iturri J, Kappl M,etal.Langmuir[J], 2014, 30(37): 11175-11182.
[60]Jin K, Cremaldi J C, Erickson J S,etal.AdvancedFunctionalMaterials[J], 2014, 24(5): 574-579.
[61]Tamelier J, Chary S, Turner K L.Langmuir[J], 2012, 28(23): 8746-8752.
[62]Autumn K, Peattie A M.Integrative&ComparativeBiology[J], 2002, 42(6): 1081-1090.
[63]Autumn K, Liang Y A, Hsieh S T,etal.Nature[J], 2000, 405(6787): 681-685.
[64]Aksak B, Murphy M P, Sitti M.Langmuir[J], 2007, 23(6): 3322-3332.
[65]Jin K, Tian Y, Erickson J S,etal.Langmuir[J], 2012, 28(13): 5737-5742.
[66]Reddy S, Arzt E, del Campo A.AdvancedMaterials[J], 2007, 19(22): 3833-3837.
[67]Kim T I, Pang C, Suh K Y.Langmuir[J], 2009, 25(16): 8879-8882.
[68]Yoon H, Jeong H E, Kim T-I,etal.NanoToday[J], 2009, 4(5): 385-392.
[69]Kim T W, Bhushan B.Ultramicroscopy[J], 2007, 107(10-11): 902-912.
[70]Greiner C, Arzt E, del Campo A.AdvancedMaterials[J], 2009, 21(4): 479-482.
[71]Murphy M P, Kim S, Sitti M.ACSAppliedMaterials&Interfaces[J], 2009, 1(4): 849-855.
[72]Ho A Y, Yeo L P, Lam Y C,etal.AcsNano[J], 2011, 5(3): 1897-1906.
[73]Lee D Y, Lee D H, Lee S G,etal.SoftMatter[J], 2012, 8(18): 4905.
[74]Northen M T, Turner K L.Nanotechnology[J], 2005, 16(8): 1159-1166.
[75]Lee J, Bush B, Maboudian R,etal.Langmuir[J], 2009, 25(21): 12449-12453.
[76]Ma S, Wang D, Liang Y,etal.Small[J], 2015, 11(9-10): 1131-1137.
[77]Isla P Y, Kroner E.AdvancedFunctionalMaterials[J], 2015, 25(16): 2444-2450.
[78]Kwak M K, Jeong H E, Suh K Y.AdvancedMaterials[J], 2011, 23(34): 3949-3953.
[79]Mahdavi A, Ferreira L, Sundback C,etal.ProceedingsoftheNationalAcademyofSciencesoftheUnitedStatesofAmerica[J], 2008, 105(7): 2307-2312.
[80]Dai Z D, Sun J R.JournalofBionicEngineering[J], 2007, 4(2): 91-95.
[81]Zhou M, Tian Y, Sameoto D,etal.ACSAppliedMaterials&Interfaces[J], 2013, 5(20): 10137-10144.
[82]Bae W G, Kim D, Kwak M K,etal.AdvancedHealthcareMaterials[J], 2013, 2(1): 109-113.
[83]Song W.Nanoscale[J], 2014, 6(22): 13435-13439.
[84]Henrey M, Ahmed A, Boscariol P,etal.JournalofBionicEngineering[J], 2014, 11(1): 1-17.
[85]Krahn J, Liu Y, Sadeghi A,etal.SmartMaterialsandStructures[J], 2011, 20(11): 115021.
[86]Eisner T, Aneshansley D J.ProceedingsoftheNationalAcademyofSciencesoftheUnitedStatesofAmerica[J], 2000, 97(12): 6568-6573.
[87]Federle W, Riehle M, Curtis A S G,etal.Integrative&ComparativeBiology[J], 2002, 42(6): 1100-1106.
[88]Dirks J H, Clemente C J, Federle W.JournaloftheRoyalSocietyInterface[J], 2010, 7(45): 587-593.
[89]Peisker H, Gorb S N.JournalofExperimentalBiology[J], 2012, 215(8): 1266-1271.
[90]Gorb S N.ProceedingsoftheRoyalSocietyBBiologicalSciences[J], 1998, 265(1398): 747-752.
[91]Persson B N, Albohr O, Tartaglino U,etal.JournalofPhysicsCondensedMatter[J], 2005, 17(1): R1-R62(62).
[92]Drechsler P, Federle W.JournalofComparativePhysiologyASensoryNeural&BehavioralPhysiology[J], 2006, 192(11): 1213-1222.
[93]Varenberg M, Gorb S N.AdvancedMaterials[J], 2009, 21(4): 483-486.
[94]Iturri J, Xue L, Kappl M,etal.AdvancedFunctionalMaterials[J], 2015, 25(10): 1499-1505.
[95]Drotlef D-M, Stepien L, Kappl M,etal.AdvancedFunctionalMaterials[J], 2013, 23(9): 1137-1146.
[96]Xue L, Kovalev A, Eichler-Volf A,etal.NatureCommunications[J], 2015, 6: 6621.
[97]Tsipenyuk A, Varenberg M.JournaloftheRoyalSocietyInterface[J], 2014, 11(94): 20140113.
[98]Chen H, Zhang L, Zhang D,etal.ACSAppliedMaterials&Interfaces[J], 2015, 7(25): 13987-13995.
(编辑 吴 琛)
Biomimetic Micro- and Nanopillar Adhesives
WANG Xin, LI Qian, XUE Longjian
(School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Many animals (gecko, beetle, tree frog, etc.) can climb on various substrates by reversible adhesion forces, which are determined by the micro/nano-pillar structures (seta, smooth pad, etc.) on their toe pads. On the one hand, the mirco/nano-pillars with fine sub-structures ensure numerous effective contact points between the toe pad and the substrate, forming tremendous adhesion forces as high as 200 times of animal’s body weight. On the other hand, the fine structures of mirco/nano-pillars also ensure the effective detachment from the adhering substrate. The adhesion abilities, relying on the fine structures rather than the surface chemistry, arise great scientific interests and widely potential applications.
bioinspired materials; dry adhesion; wet adhesion; friction; pillar array; polymer; gecko
2016-08-22
国家自然科学基金资助项目(51503156,51611530546)
汪 鑫 ,男,1988年生,博士研究生
薛龙建 ,男,1983年生,教授,博士生导师, Email: xuelongjian@whu.edu.cn
10.7502/j.issn.1674-3962.2017.01.07
TB17
A
1674-3962(2017)01-0048-10
