双通道传递函数法测量矢量水听器自噪声
2017-02-06陈洪娟
李 智,陈洪娟,张 虎
(1. 哈尔滨工程大学水声工程学院,黑龙江哈尔滨 150001;2. 哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨 150001)
0 引 言
矢量水听器具有自然低频余弦指向性以及抗各向同性噪声干扰能力,能够获得一定的空间增益[1-2],因此在低频目标的远程探测领域具有更大的发展及应用潜力[3-5]。矢量水听器的自噪声大小决定了其对弱信号的获取能力,从而影响了声探测系统的性能。对矢量水听器自噪声的准确测量,是矢量水听器在远程探测领域工程应用中要解决的一项重要课题。
相比于声压水听器,矢量水听器不但对声信号敏感,同时也对振动信号敏感。因此,矢量水听器自噪声测量受环境干扰严重。虽然利用减振、抽真空等方法可以在一定程度上对环境干扰起到抑制作用[6],但振动干扰仍不可避免地通过悬挂系统传递到矢量水听器的接收端,使得实际测量结果中混有环境噪声干扰,从而令测量结果高于真实的自噪声,导致对矢量水听器的自噪声评价不准确。因此,仅仅利用直接测量的方法,不能对矢量水听器的自噪声水平做出有效评价。截止目前,未见有针对矢量水听器自噪声测量方法方面的文献报道。
针对以上问题,提出了利用双通道传递函数法测量矢量水听器的自噪声,分析了该方法降低环境干扰的原理;通过实验手段分析了利用该方法测量时,背景噪声条件及水听器布放距离等因素对测量结果的影响,并测量了矢量水听器的等效噪声加速度谱级,计算了相应的平面波场下的等效噪声声压谱级。
1 等效自噪声测量原理
1.1 单水听器直接测量原理
对于单只矢量水听器的等效自噪声测量,一般是将矢量水听器输出的信号直接作为其自噪声的一种测量方法。根据矢量水听器输出的时域噪声电压信号x(t),计算得到输出噪声电压的功率谱密度,表示为

其中,Rxx(τ)为自相关函数。若矢量水听器的加速度灵敏度为Ma,则等效噪声加速度谱密度表示为

1.2 双通道传递函数法测量原理
矢量水听器的自噪声来源于其材料、结构等引起的机械热噪声及前置放大电路引起的电子热噪声,且只与自身有关[7];测量环境背景噪声包括空气中的噪声干扰,以及通过测量基础平台或悬挂系统传递到传感器接收端的振动干扰。放置在同一测试地点的两只矢量水听器,各自的自噪声彼此不相关,且每只矢量水听器的自噪声与环境背景噪声也不相关;而测试环境的背景噪声是完全相同的。因此,对两只矢量水听器的输出信号进行互相关计算就可以剔除彼此不相关的自噪声信号,从而得到环境背景噪声功率谱;再利用其中一只水听器的输出自功率谱减去环境背景噪声功率谱,就可以得到该只传感器的自噪声功率谱。图1给出了该测量方法的原理框图。

图1 双通道传递函数法测量矢量水听器自噪声原理框图Fig.1 Schematic of measuring self-noise of acoustic vector sensor by using dual-channel transform function method
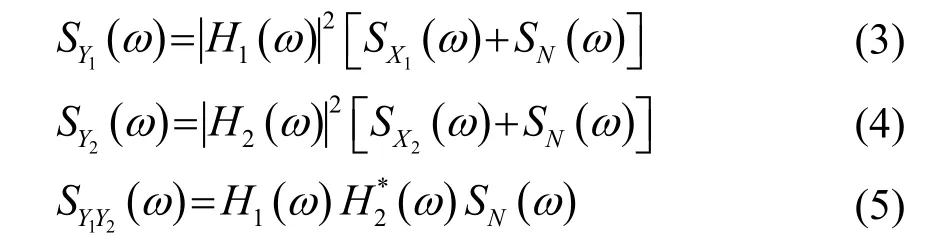
通过测量可以直接得到两只矢量水听器输出信号的自功率谱密度以及互功率谱密度将式(3)~(5)按照图 1中所述的方法进行运算,可以分别得到两只矢量水听器的自噪声功率谱密度表达式:
若两只待测传感器的传递函数已知,那么可以分别计算出传感器各自的自噪声功率谱密度,而不受环境背景噪声影响。
对于两只矢量水听器的输出信号,其相干函数定义为:

若实验中两只待测矢量水听器所采用的元件及结构相同,且制作工艺相同,那么可认为两只矢量水听器的传递函数相近,则其输出噪声谱近似相等,则矢量水听器的自噪声功率谱密度可近似表示为:

即可以用相干函数求得矢量水听器的等效自噪声谱密度。
2 实验及结果分析
在实际测量实验中,采集器的等效输入自噪声决定了系统可以测得矢量水听器的最小自噪声。因此,为了确保测量的正确性,首先要清楚采集器的等效输入自噪声。本文使用丹麦B&K公司的3052高精度宽动态范围数据采集记录器进行双通道噪声采集,经实际测试(输入端接50 Ω电阻),其等效输入噪声电压谱密度为41.5nV/@100 Hz。为了说明采集系统可以测得的矢量水听器的最小噪声,需要将采集器的等效输入噪声电压谱密度U(单位为V/)转换为表征矢量水听器等效噪声的物理量。一般来说,利用等效噪声加速度谱密度Va(单位为µg/)来表征矢量水听器的等效自噪声。两者之间的转换关系如下:

式中,Ma为矢量水听器的加速度灵敏度,单位为V/g。例如,加速度灵敏度为10V/g的矢量水听器,利用该采集系统进行噪声测量,系统可以测得的最小等效噪声加速度为4.15ng/@100 Hz。
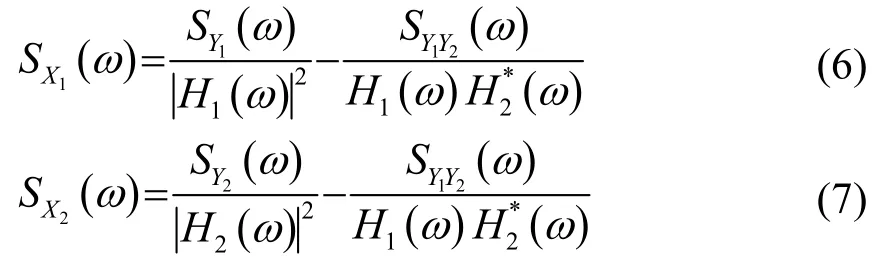
实验选取两只自研的矢量水听器,其采用的元件和结构设计均相同,且制作工艺相同,因此两只矢量水听器的传递函数相近,且自噪声大小相近[7]。将两只矢量水听器紧挨(但不接触)布放到水箱中(见图2),分别选择中午环境背景噪声较高的时段和晚间环境背景噪声较低的时段记录数据,并利用双通道传递函数法分别计算两只矢量水听器的自噪声,结果如图3和图4所示。图3、4中虚线为直接测量得到的噪声功率谱密度,实线为利用双通道传递函数法计算得到的等效噪声加速度功率谱密度(0 dB=1g/)。
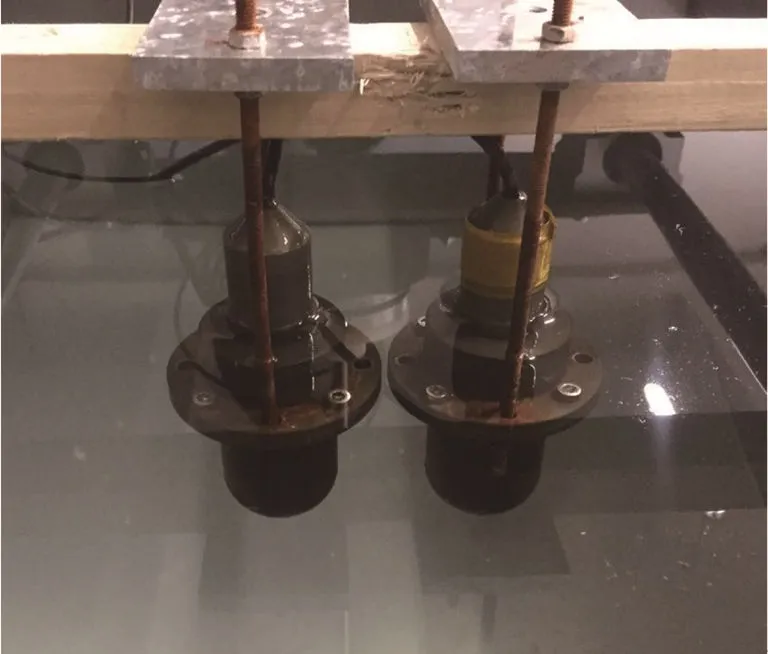
图2 在水箱中测量矢量水听器自噪声Fig.2 Measuring self-noise of vector sensor in a small water tank
首先,以1#矢量水听器作为待测水听器,从图3(a)和图 4(a)的直接测量结果中可以看出,中午时段的环境背景噪声高于晚间时段;但不论环境背景噪声高低,使用该方法计算得到的自噪声功率谱密度均相对直接测量值有明显降低,这说明该方法可以有效降低环境背景噪声干扰。若以2#作为待测矢量水听器,可以得出相同的结论(图3(b)和图4(b))。
从相同环境背景噪声条件下1#和2#矢量水听器利用双通道传递函数法计算得到的自噪声结果比对中(图3(a)和3(b)或图4(a)和4(b))可以看出:在环境背景噪声相同的条件下,两只矢量水听器得到的自噪声结果非常接近。
另外,以1#矢量水听器作为待测水听器,比较图3(a)和图4(a)中利用双通道传递函数法得到的自噪声结果,可以看出:在低环境背景噪声时段计算得到的矢量水听器自噪声低,高环境背景噪声时段计算得到的自噪声高。若以2#矢量水听器作为待测水听器,可以得到同样的结论(图 3(b)和图 4(b))。造成该结果的原因是:虽然两只矢量水听器的传递函数相近,但由于各自的敏感元件不能完全相同,且制作工艺不能达到完全一致等原因,使得传递函数不可能完全相同,因此造成水听器对环境噪声的响应不同;环境背景噪声越高,两水听器输出信号差异越大,环境背景噪声降低越不明显,因此计算得到的自噪声结果越高。由于实际中很难保证两只水听器的传递函数完全相同,因此,在低环境背景噪声时段进行测量,或者对测量环境进行减振、隔声处理,可以得到更准确的自噪声结果。
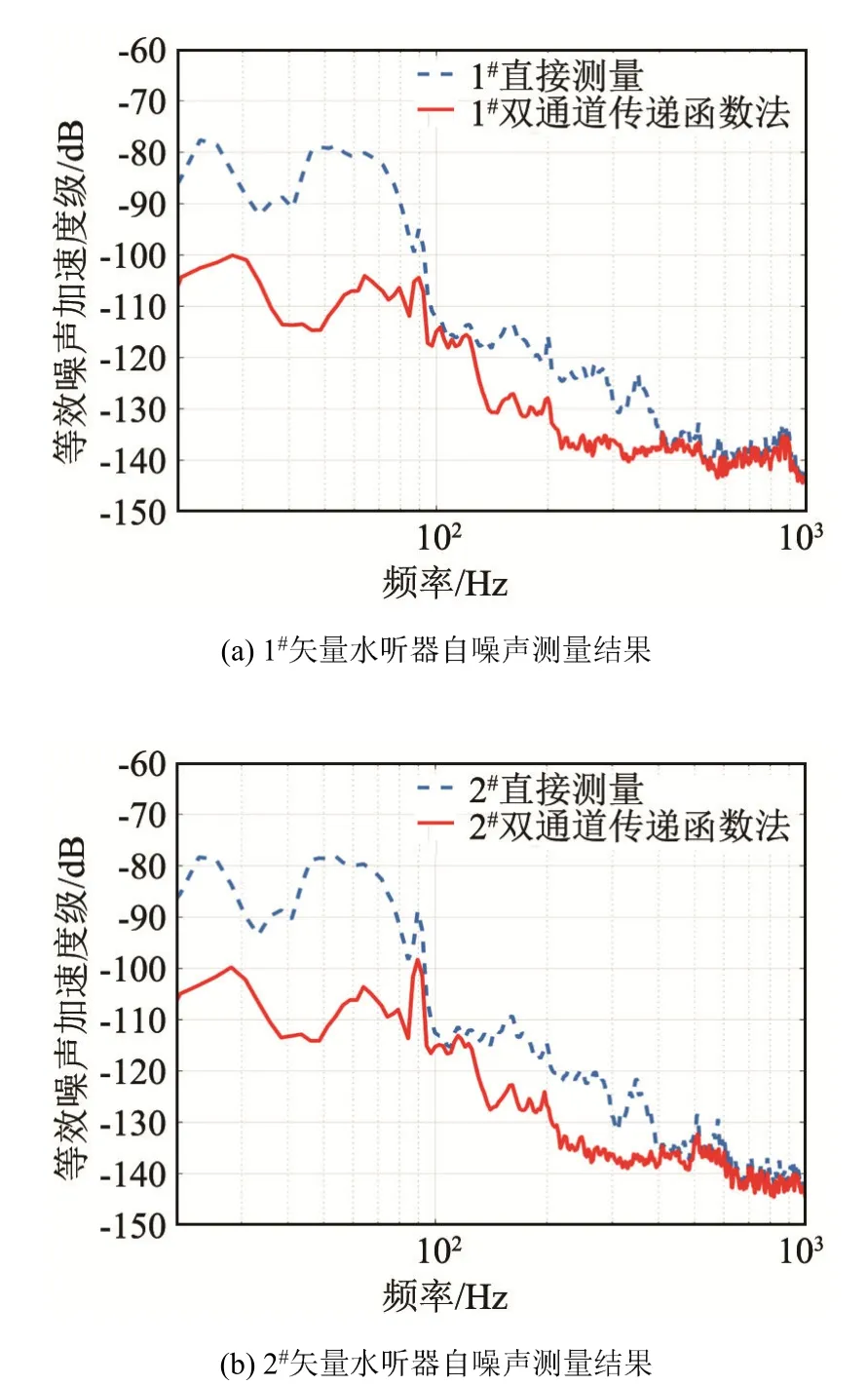
图3 高环境背景噪声下矢量水听器等效噪声加速度谱级Fig.3 Equivalent noise acceleration spectral level of vector sensor measured in the high background noise
在上述低环境背景噪声时间段,将两矢量水听器的间距调整为20 cm,得到的结果如图5所示。以1#矢量水听器作为待测水听器,对比图4(a)和图5(a)的计算结果可以看出:远距离布放条件下利用双通道传递函数法计算得到的矢量水听器自噪声偏高。由于两只矢量水听器所接收到的环境背景噪声包括来自水中的噪声以及来自悬挂结构的振动干扰两部分,因此,若布放距离增加,两只矢量水听器由于悬挂引入的振动干扰相关性下降,造成环境背景噪声相关性下降,因而造成自噪声计算结果偏高。
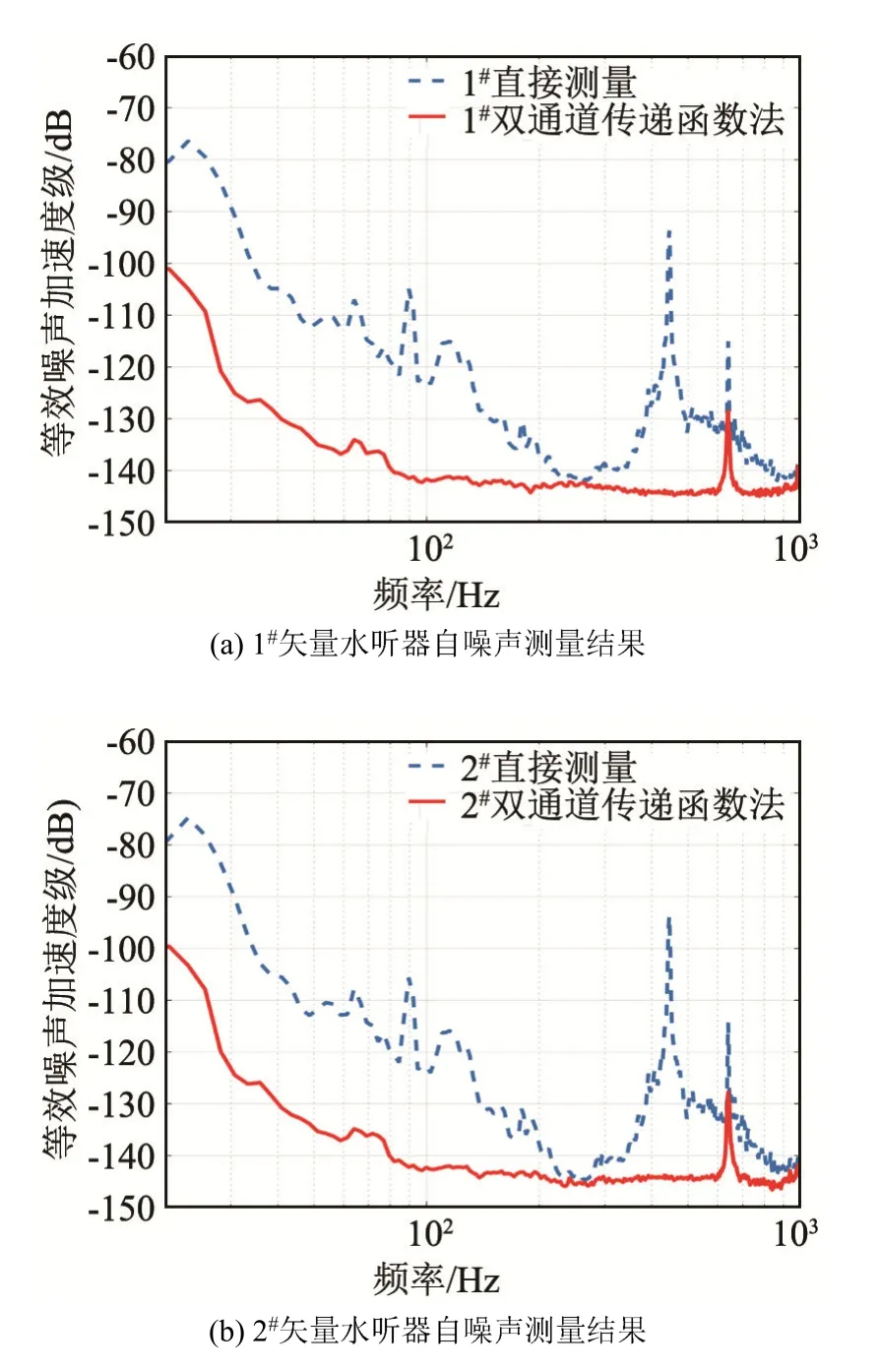
图4 低环境背景噪声下矢量水听器等效噪声加速度谱级Fig.4 Equivalent noise acceleration spectral level of vector sensor measured in the low background noise
另外,两只矢量水听器的结果中都存在不同程度的线谱,这些线谱是由悬挂带来的。水听器悬挂的位置不同,结果表现出的线谱频率成分也不同。因此,利用双通道传递函数法测量自噪声,需要将两只矢量水听器尽量靠近布放,以便使两只水听器环境背景噪声中的振动干扰相关程度更高,从而使得对环境背景噪声的抑制效果提高。
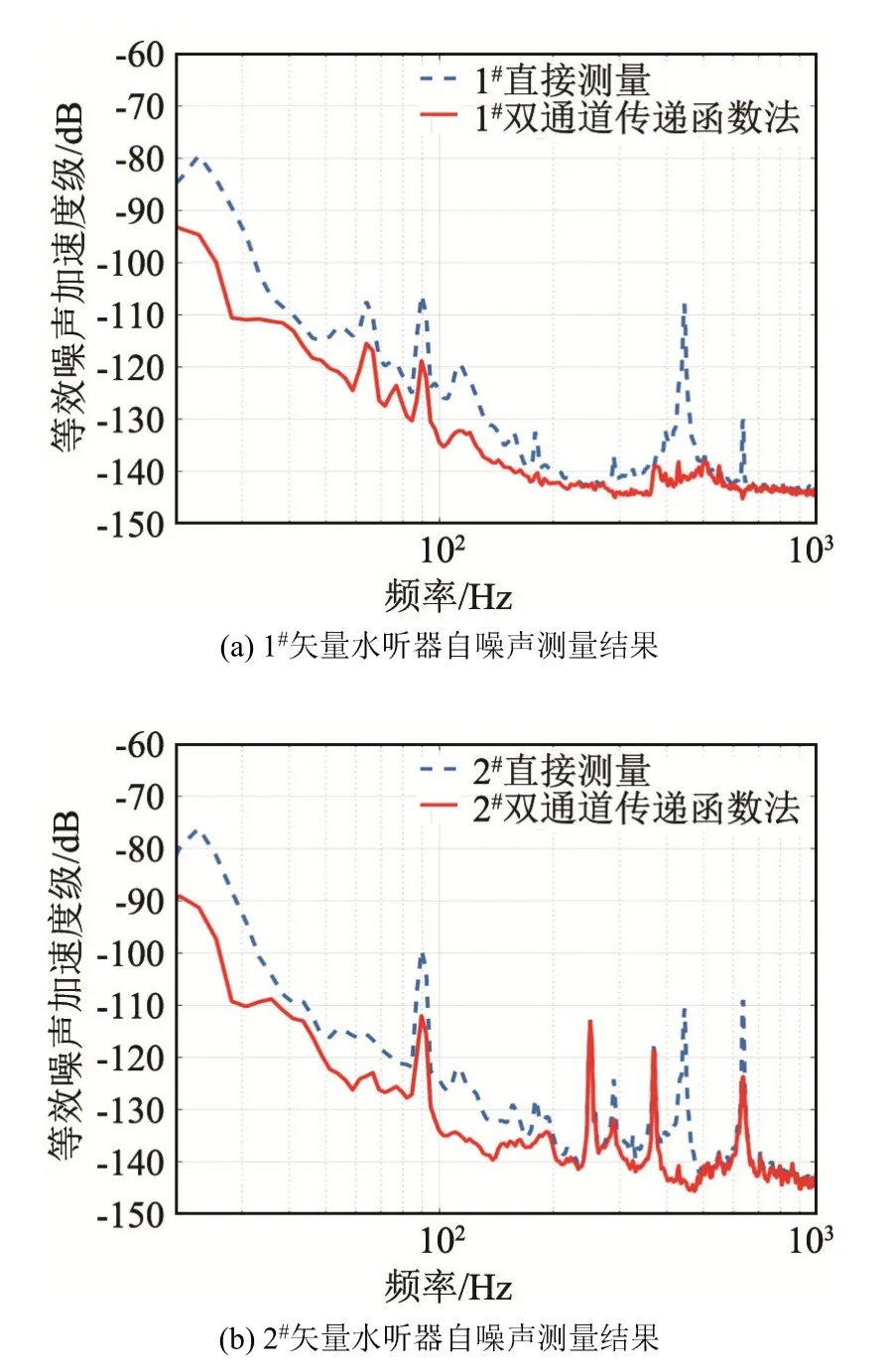
图5 两水听器远距离布放条件下矢量水听器等效噪声加速度谱级Fig.5 Equivalent noise acceleration spectral level of vector sensor measured in the condition of two sensors with a larger spacing
基于以上分析,在低环境背景噪声且两矢量水听器布放距离尽量靠近的条件下,测量得到的等效自噪声结果更加准确,如图4所示。1#矢量水听器的等效噪声加速度谱密度为83.2ng@100 Hz,相应的等效噪声声压级约为65.8dB@100 Hz(0 dB=1 µPa);2#矢量水听器的等效噪声加速度谱密度为76.7ng@100 Hz,相应的等效噪声声压级约为65.1dB/@100 Hz (0dB=1µPa)。
3 结 论
利用双通道传递函数法对矢量水听器的自噪声进行测量时,首先要将两水听器布放距离尽可能靠近(但不接触),以使接收到的环境背景噪声相关程度更高;选择环境背景噪声相对较低的时段进行测量,或采用物理减振手段对测量环境加以减振、隔声处理,以避免在环境背景噪声过高时由于两水听器传递函数不一致,而对计算结果造成影响。实验结果表明,利用该方法测量矢量水听器自噪声,可以有效降低环境干扰(约 20dB/@100 Hz),从而得到更加准确的自噪声结果。实测的矢量水听器等效噪声加速度谱密度结果约为 76.7 ng/@100 Hz 。该方法为准确评价矢量水听器的自噪声提供了有效的手段。
[1]Gordienko V A. 声矢量-相位技术[M]. 贾志富 译. 北京:国防工业出版社. 2014: 184-189.V. A. Gordienko. Vector-phase methods in acoustics[M]. JIA Zhifu, translate, Beijing: National Defense Industry Press, 2014:184-189.
[2]陈洪娟. 矢量传感器[M]. 哈尔滨: 哈尔滨工程大学出版社, 2006:13-32.CHEN Hongjuan. Vector sensor[M]. Harbin: Harbin Engineering University Press, 2006: 13-32.
[3]郭俊媛, 杨士莪, 朴胜春等. 基于超指向性多极子矢量阵的水下低频声源方位估计方法研究[J]. 物理学报, 2016, 65(13): 181-194.GUO Junyuan, YANG Shi’e, PIAO Shengchun, et al. Direction-of-arrival estimation based on superdirective multi-pole vector sensor array for low-frequency underwater sound sources[J]. Acta Physica Sinica, 2016, 65(13): 181-194.
[4]Guo X, Yang S, Miron S. Low-frequency beamforming for a miniaturized aperture three-by-three uniform rectangular array of acoustic vector sensors[J]. J. Acoust. Soc. Am., 2015, 138(6): 3873.
[5]Yang S. Directional pattern of a cross vector sensor array[J]. J.Acoust. Soc. Am., 2012, 131(4): 3484.
[6]袁文俊. 声学计量[M]. 北京: 原子能出版社, 2002: 204-205.YUAN Wenjun. Acoustic metrology[M]. Beijing: Atomic Energy Press, 2002: 204-205.
[7]Gabrielson T B. Fundamental noise limits for miniature acoustic and vibration sensors[J]. J. Acoust. Soc. Am., 2015, 117(4): 405-410.
