系统时间偏差数据对四系统定位性能的改善评估
2017-02-05王欢张慧君李孝辉
王欢,张慧君,李孝辉,4
系统时间偏差数据对四系统定位性能的改善评估
王欢1,2,3,张慧君1,2,李孝辉1,2,4
(1. 中国科学院 国家授时中心,西安 710600; 2. 中国科学院 精密导航定位与定时技术重点实验室,西安 710600; 3. 中国科学院大学,北京 100049; 4. 中国科学院大学 天文与空间科学学院,北京 100049)
随着全球导航卫星系统GPS,GLONASS,Galileo以及BDS的快速发展,多GNSS(全球卫星导航系统)联合定位因其有诸多优点而越来越受到关注。然而,系统之间的时间偏差是多系统联合定位导航时需要重点解决的问题之一。研究了多系统组合定位中系统时间偏差的处理算法。在此基础上,利用四系统测地型接收机的实测数据,结合中国科学院国家授时中心的GNSS系统时间偏差监测数据,初步研究并分析了四系统的定位性能,详细比较分析了不同截止高度角情况下,使用先验的系统时差以及用户端解算系统时差的多系统组合定位精度。试验结果表明:利用系统时间偏差监测数据进行多系统组合定位可以有效的改善定位精度。此外,在截止高度角大于30°的环境下,由于可见卫星数目不多导致单系统无法连续定位,而多系统仍可以连续定位并且达到较高的精度,这对半城市化、城市峡谷等环境具有一定的应用价值。
GNSS系统时差;多GNSS;组合定位;定位精度;DOP
0 引言
目前全球导航卫星系统(GNSS)已经步入新的发展时代。GPS系统拥有30颗在轨卫星,已经进入GPSIII的现代化发展阶段。GLONASS将来计划拥有30颗卫星,其中包括24颗运行卫星,6颗冗余卫星。Galileo卫星导航系统目前拥有12颗在轨卫星,其中包括4颗IOV(在轨认证)卫星和8颗FOC(全运行能力)卫星。期望在2020年实现完整的全运行能力的Galileo系统。而我国的北斗卫星导航系统(BDS)于2012年10月完成了北斗全球系统一期的建设工作,拥有5颗GEO(静止轨道)卫星、5颗IGSO(倾斜同步轨道)卫星以及4颗MEO(中轨道)卫星。目前,北斗卫星导航系统已经进入了北斗全球系统的二期发展阶段,北斗全球系统星座将由5颗GEO卫星、3颗IGSO卫星以及27颗MEO卫星构成。
随着GPS,GLONASS,Galileo以及BDS的不断发展,多GNSS接收机以及定位终端的应用需求也日益增加,接收机终端制造商以及用户都期望从使用多GNSS测距信号中受益。这是由于附加的测距源可以改善卫星几何布局,提高定位导航的准确度、完好性、连续性以及有效性等方面。
当使用多GNSS测距信号时,接收机所遇到的其中一个问题就是GNSS系统间的时间偏差的处理。每一个卫星导航系统都拥有自己独立稳定的系统时间。GPS的系统时间是GPST,GLONASS的系统时间是GLONASST,BDS的系统时间是BDT,Galileo的系统时间是GST[1]。而多系统组合导航定位需要将伪距测量改正到一个统一的时间参考上,这就需要精确地确定系统间的时间偏差。为了使GNSS系统时间具有互操作性,卫星导航系统提供者也都已经或者计划去测量与其他卫星导航系统时间之间的偏差,然后广播系统时间偏差预报模型参数。例如,GLONASS卫星导航系统已经在广播GLONASS系统时间与GPS系统时间之间的偏差,Galileo卫星导航系统也在进行Galileo系统时间与GPS系统时间偏差的广播试验。再者,用户也可以采用第三方组织或者机构所公开发布的系统时间偏差值进行定位后处理,这二者均称为系统级时间偏差处理方法。中国科学院国家授时中心已经建立了GNSS系统时间偏差监测系统,该监测系统以UTC(NTSC)为参考时间尺度,监测GPST,GLONASST,BDT,GST相对于UTC(NTSC)的时间偏差[2-3],通过Internet网络发布监测与预报结果,并且通过通信卫星广播预报模型参数。用户可以根据监测值获得GNSS系统时间之间的偏差。
然而,使用系统广播的时间偏差预报模型参数具有不准确的风险。因此,一些接收机用户会倾向于在接收机端自己解算系统时间偏差。然而,用户端解算系统时间偏差是以消耗每一个附加GNSS系统的一颗星为代价的,在开阔环境下采用用户端解算的方式不会影响定位精度。而在遮挡环境中,尤其是在极端环境下(比如城市峡谷等)以及安全性能要求较高的航空领域等,由于需要一定的算法去检测系统的可靠性,从而在有效卫星数目减少的情况下进一步消耗卫星测距信号资源,使得多GNSS系统的星地几何分布恶化。因此,如何在各种复杂环境条件以及不同的应用领域去灵活处理系统时间偏差就面临极大的挑战[4-5]。
在本论文撰写之前,国内外对于多系统组合定位的实际测试试验主要以双系统(GPS/GLONASS组合、GPS/BDS组合、GPS/Galileo)组合为主[6-9],少量针对三系统组合定位(GPS/GLONASS/BDS)研究,随着近一年来Galileo系统单独定位里程碑式的发展,在中国区域能够实现四系统连续组合定位测试试验。这篇论文的目的是研究系统时间偏差两种处理方法(系统级和用户级),并且在国家授时中心GNSS系统时间偏差监测结果的基础上,针对目前主要的四大GNSS系统(GPS,GLONASS,Galileo以及BDS),采用四系统接收机的实测数据,比较分析在不同的遮挡条件下,使用系统时间偏差(系统级)和用户端解算时间偏差(用户级)时,单系统、双系统以及多系统组合定位准确性、连续性以及DOP 值的变化情况。
1 多GNSS定位解算法中系统时间偏差处理策略
单系统卫星导航定位算法通常是基于最小平方或者滤波算法。在定位解之前,必须经过预处理从伪距测量量中扣除电离层延迟、对流层延迟、卫星钟差等模型误差。经过预处理之后,伪距测量方程线性化表达式[10]如下:

1.1 用户级系统时间偏差处理方法






1.2 系统级系统时间偏差处理方法


2 多GNSS系统组合定位测试试验
2.1 试验方案
为了评估系统时间偏差对多系统组合定位性能的影响,所采用的组合定位试验框图如图1所示,试验地点在国家授时中心(临潼)。GNSS多系统组合接收机PolaRx4TR由比利时Septentrio公司生产,配置Novatel公司生产的750扼流圈天线,它可以接收目前四大GNSS系统(GPS,GLONASS,Galileo和BDS)的空间导航信号。国家授时中心的标准1 PPS时间信号以及10 MHz频率信号提供给接收机作为时间频率参考。数据处理计算机通过多GNSS接收机数据采集软件进行采集四系统伪距、星历等数据,并且结合国家授时中心的GNSS系统时间偏差监测系统的系统时间偏差监测数据进行组合定位数据分析处理。
2.2 试验设计
本文设计了截止高度角10°,20°和30°情况下8种定位模式。分析了这8种模型下的可视卫星数目、定位性能及DOP值的变化情况,重点研究使用先验的系统时间偏差监测结果给多系统组合定位带来的影响。8种定位模式如下:
① GPS系统单独定位;
② GLONASS系统单独定位;
③ BDS系统单独定位;
④ GPS/GLONASS组合定位(系统级和用户级);
⑤ GPS/Galileo组合定位(系统级和用户级);
⑥ GPS/BDS组合定位(系统级和用户级);
⑦ GPS/Galileo/BDS组合定位(系统级和用户级);
⑧ GPS/GLONASS /Galileo/BDS组合定位(系统级和用户级)。
3 试验结果分析
试验选取了国家授时中心(临潼)2016年5月18日1d的观测数据,数据采样间隔60s,为了减少伪距测量噪声和多径影响,进行载波相位平滑伪距的处理。分别对单系统或者多系统组合的可见星、定位结果以及DOP值进行分析。
3.1 可见星分析
采用试验数据,图2给出了1 d内不同截止高度角(10°,20°和30°)下,单系统(G,R,C)、双系统(GR,GE,GC),三系统(GEC),四系统(GREC)共8种导航模式的可见卫星数目的平均值。
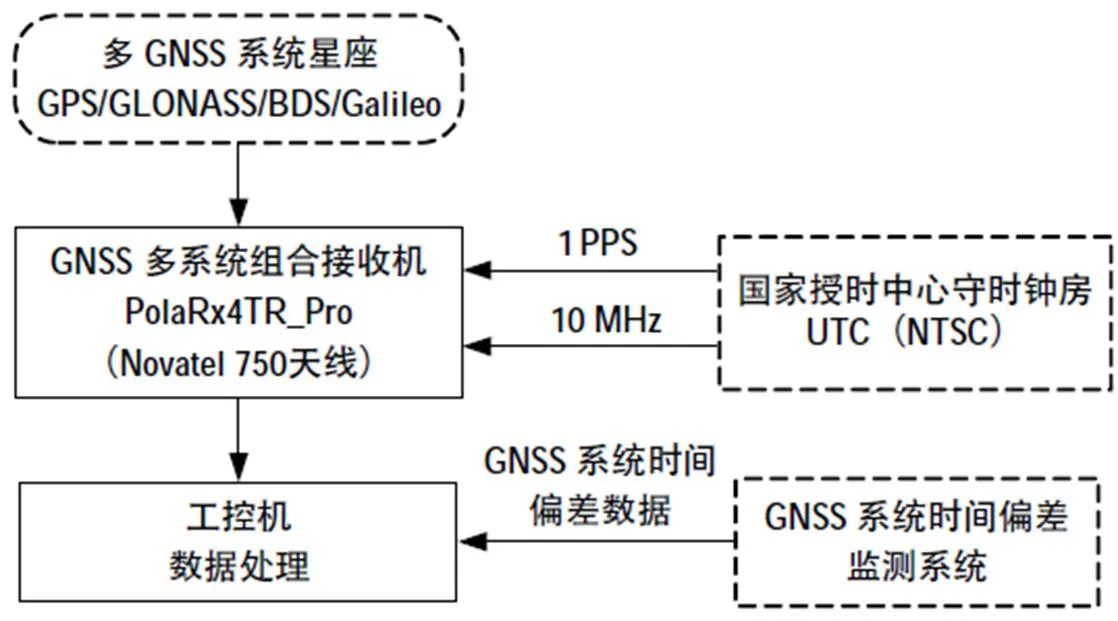
图1 多GNSS系统组合定位试验原理图
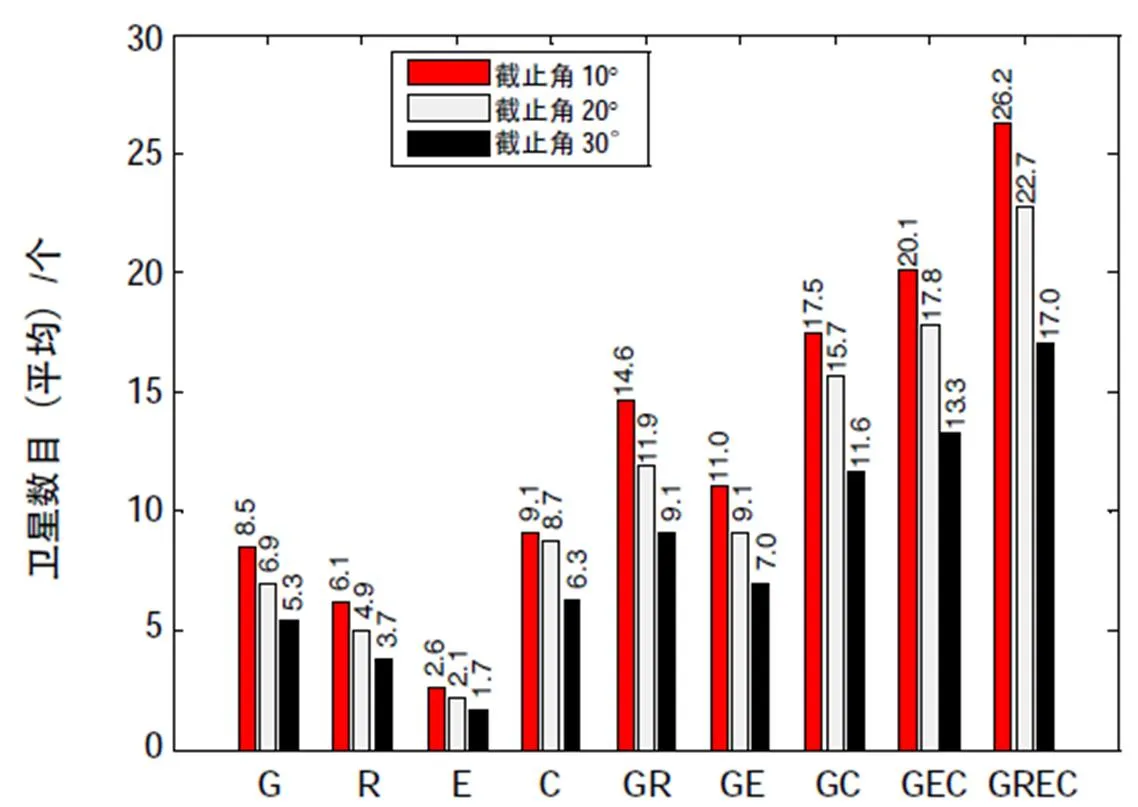
注:G、R、E和C分别代表导航系统GPS,GLONASS,Galileo和BDS。
由图2可得,随截止高度角的增加,单系统的可见卫星数目降至较低的范围,甚至不能满足定位条件,而多系统组合,尤其是四系统组合从截至高度角10°~30°时可见卫星数目始终平均保持在17颗以上,这对于在半城市化、城市峡谷等极端环境有望提高导航定位能力。
3.2 多系统组合定位解分析
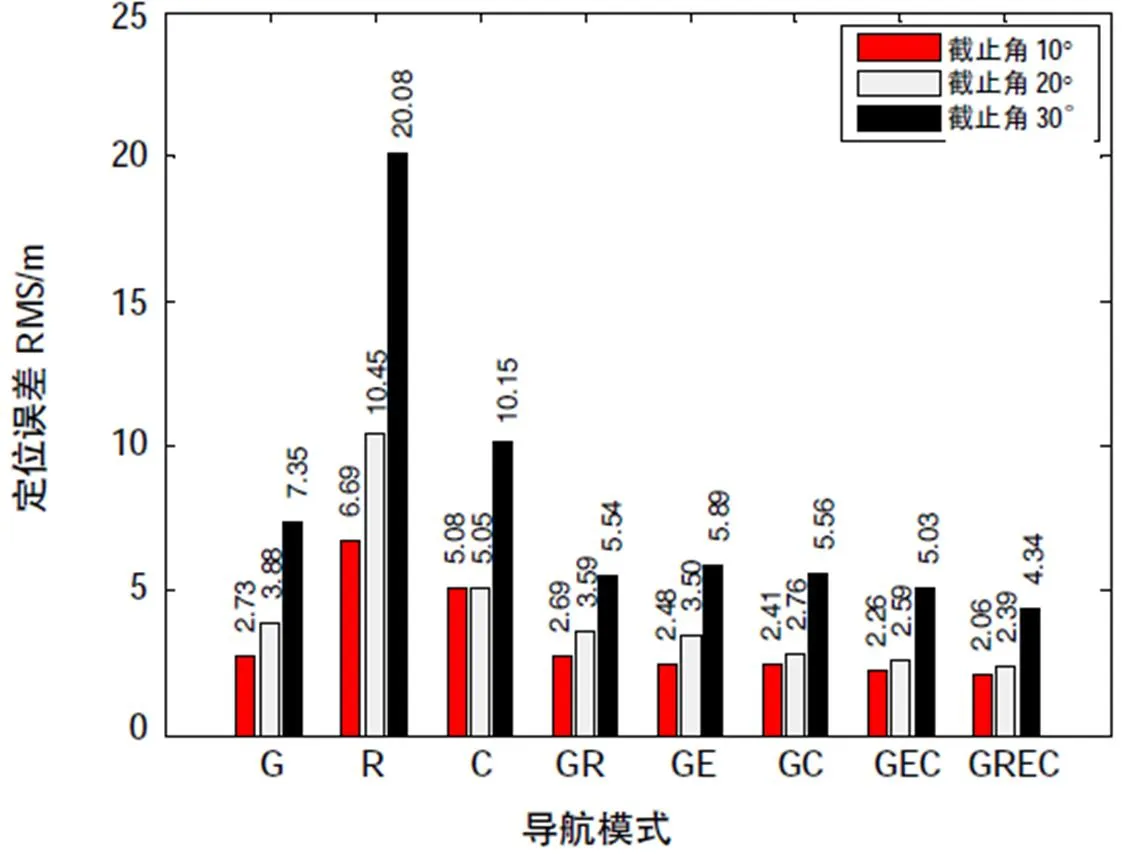
采用数据处理算法和试验数据,对西安临潼站点分析1 d内不同截止高度角(10°,20°和30°)下,单系统(G,R,C)、双系统组合(GR,GE,GC)、三系统组合(GEC)、四系统组合(GREC)共8种导航模式的定位误差的RMS值。图3和图4分别给出了8种导航模式用户级处理算法、系统级处理算法的定位误差RMS值,表1给出了10°,20°和30°截止高度角下四系统对于单系统GPS定位误差RMS的改善率。
注:G、R、E和C分别代表导航系统GPS,GLONASS,Galileo和BDS。
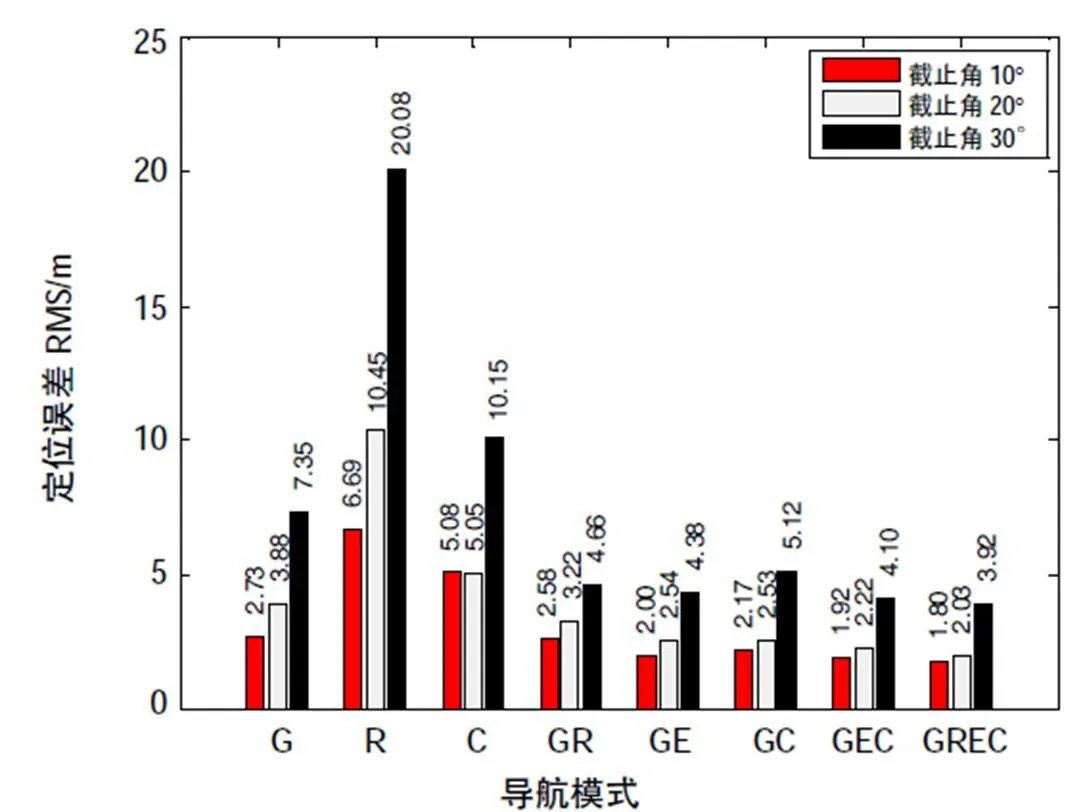
注:G、R、E和C分别代表导航系统GPS,GLONASS,Galileo和BDS。

表1 不同截止高度角的单GPS(G)和四系统(GREC)的定位误差RMS改善率
从图3可以看出,在相同截止高度角下,多系统组合定位精度明显要优于单系统,尤其在截止高度角30°时,单GPS(G)卫星数目不多,定位误差RMS值7.35 m,其他导航系统开始发挥作用,三系统(GEC)定位误差RMS值5.03 m,而四系统(GREC)定位误差RMS值4.34 m,对单GPS(G)系统明显改善;从图4可以得出,随截止高度角的增大,单系统和多系统的定位误差RMS值都在增大,但单系统的增大速度大于多系统,说明在观测条件不佳的环境下,多系统定位有明显优势;从图3和图4可以得出,在多系统组合定位中,系统级处理相比用户级解算处理能有效的改善定位精度;从表1可以看出,四系统(GREC)组合定位相比单GPS(G)定位最优改善47.68%和46.67%,系统级处理改善效果相比用户级解算处理改善更为显著。
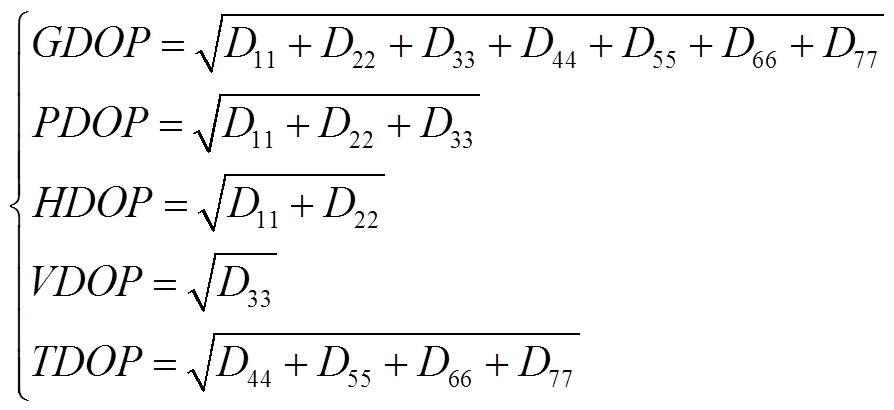
3.3 DOP值的影响分析

表2 不同导航模式下DOP值
4 结论
本文基于四系统测地型接收机的实测数据,结合国家授时中心的GNSS系统时间偏差监测数据,对比分析了在截止高度角10°,20°和30°情况下,单系统(G,R,C)、双系统(GR,GE,GC)、三系统(GEC)和四系统(GREC)的可视卫星数目、定位性能以及DOP值,以及系统级处理系统时差对多系统组合定位性能的影响。得到以下结论:
① 在同一导航模式下,随着截止高度角的增大,卫星可见数目减少,定位误差和DOP值增大;
② 在相同截止高度角下,多系统组合定位模式的可见卫星数目明显多于单系统的可见卫星数目,尤其在截止高度角大于30°的环境下,由于可见卫星数目不足,单GLONASS(R)、单Galileo(E)系统无法连续定位,而三系统(GEC)、四系统(GREC)组合可见卫星数目保持在13颗以上;
③ 在相同截止高度角情况下,多系统定位性能明显优于单系统,尤其在高截止高度角30°下,单GPS(G)定位结果7.35 m,而四系统(GREC)定位结果3.92 m,相比单GPS(G)定位改善46.7%,这对于半城市化,城市峡谷以及遮挡较为严重的地区有一定的应用价值;
④ 随着截止高度角的增大,卫星可见数目减少,几何分布越来越差,多系统组合定位(用户级处理)比系统级处理需要多消耗卫星数目,从而导致多系统组合定位(用户级处理)DOP值恶化程度大于系统级处理;
⑤ 随着截止高度角的增大,在多系统组合定位中,系统级处理相比用户级解算处理能有效地改善定位精度。
[1] 吴海涛, 李孝辉, 卢晓春, 等. 卫星导航系统时间基础[M]. 北京: 科学出版社, 2011.
[2] ZHANG H, ZHU L, LI X, et al. A method of GNSS system time offset monitoring[C]//IEEE International Frequency Control Symposium & European time frequency Forum, 2014: 838-842.
[3] ZHANG H, ZHU L, LI X, et al. GNSS system time offset monitoring at NTSC[C]//IEEE International Frequency Control Symposium, TaiBei: 2019 IFCS Proceedings, 2014: 1-5.
[4] WINIT R. Four-constellation GNSS reliability and the estimation of inter-system time-offsets for improved performance in challenging signal environments[D]. Alberea: Univ. of Calgary, 2013.
[5] MOUDRAK A, KONOVALTSEV A, FURTHNER I, et al. GPS Galileo time offset: How it affects positioning accuracy and how to cope with it[C]//ION GNSS 17th International Technical Meeting of the Satellite Division, 2004.
[6] 许龙霞, 李孝辉. 多模卫星导航中时差处理方法对定位的影响分析[J]. 仪器仪表学报, 2009, 30(10): 192-195.
[7] 罗小敏, 蔡昌盛. GPS/Galileo组合单点定位精度分析[J]. 大地测量与地球动力学, 2013, 33(3): 136-140.
[8] 刘基余, GPS卫星导航定位原理与方法[M]. 北京: 科学出版社, 2003.
[9] 寇艳红. GPS原理与应用[M]. 北京: 电子工业出版社, 2010.
[10] 谢钢. 全球导航卫星系统原理[M]. 北京: 电子工业出版社, 2013.
Evaluation of positioning performance improvement of four systems based on system time offset data
WANG Huan1,2,3,ZHANG Hui-jun1,2,LI Xiao-hui1,2,4
(1. National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China; 2. Key Laboratory of Precise Positioning and Timing Technology, National Time Service Center,Chinese Academy of Sciences, Xi’an 710600, China; 3. University of Chinese Academy of Sciences, Beijing 100049, China; 4. School of Astronomy and Space Science, University of Chinese Academy of Sciences, Beijing 100049, China)
With the rapid development of the global navigation satellite system (GPS, GLONASS, Galileo and BDS), multi-GNSS combined positioning has been paid more attention duo to its many advantages. However, one of the key problems in multi-GNSS combined positioning is the time offsets among GNSS system times, which need to be solved emphatically. The processing algorithm of the GNSS time offset in multi-GNSS combined positioning is studied in this paper. In order to analyze the multi-GNSS positioning performance, observation data of geodetic four-constellation GNSS receivers and the GNSS system time offset monitoring data in the National Time Service Center are used in this paper. The detailed comparative analysis of multi-GNSS positioning accuracy are made when using multi-GNSS signals with or without a priori system time offset in different elevation angle. The experiment results show that multi-GNSS combined positioning can effectively improve positioning performance by using the GNSS system time offset monitoring data. Further, under observation scenarios where the elevation angle is larger than 30 degrees and when single positioning system fails to carry out continuous positioning due to lack of visible satellites, the multi-GNSS system can still be available for continuous positioning and a higher positioning accuracy can be realized, this can be of application value for semi-urban, urban-canyon and other environments.
GNSS time offset; multi-GNSS; combined positioning; positioning accuracy; DOP
P228.4
A
1674-0637(2017)04-0231-09
10.13875/j.issn.1674-0637.2017-04-0231-09
2017-04-18
国防科技创新基金资助项目(CXJJ-17-M110)
王欢,女,硕士,主要从事系统时差多系统组合应用研究。
