地磁匹配技术在磁模拟器探测中的应用
2017-01-20汪孝文王景然顾建松
汪孝文 王景然 顾建松
(第七一五研究所,杭州,310023)
地磁匹配技术在磁模拟器探测中的应用
汪孝文 王景然 顾建松
(第七一五研究所,杭州,310023)
利用低空磁测系统对磁模拟器的探测进行试验,采用地磁匹配技术处理探测数据得到模拟器异常磁场,试验结果证明了低空磁测系统和地磁匹配技术对于复杂背景场的压制是行之有效的。
磁模拟器;地磁匹配;低空磁测
磁模拟器探测中,模拟器产生的磁场值较小,常淹没在较大的背景场中。地磁匹配技术作为磁异常信号处理常用的方法之一,理论上特别适合在这种复杂背景场中使用,如火山岩地区磁场背景干扰较大,采用地磁匹配技术可大幅降低背景干扰,然后再进行磁异常处理可取得好的效果。磁异常信号处理技术常用的方法有4种:模式识别、谱分解技术(又称正交基技术)、特征识别系统、地磁匹配技术。模式识别方法技术成熟,但对信噪比要求高;谱分解技术具有信号提取功能,但在复杂背景场中存在虚警率高的问题;特征识别系统还在软件化研究设计中,在较低信噪比时,可靠性不足,存在类地质信号目标特征干扰。地磁匹配技术是磁异常信号处理中常用的方法之一,需要地质背景场数据库,而且对实时匹配技术要求高,其目的是为了减少或消除由地质体引起的地球磁场的变化带来的干扰,利用地磁匹配技术解决复杂背景磁干扰(主要是地质体引起)是国内外研究热点之一。
本文利用低空磁测系统装备进行复杂测区的磁场探测工作,并以实际工作为例详述地磁匹配技术在磁模拟器探测中的应用。
1 测区概况
本次探测地点位于山东青岛胶南市泊里镇沐官岛村,位于黄海前沿,是一个孤岛,测区位于该岛西南部10 km处海域,为4 km×4 km正方形测框,如图1所示。磁模拟器位于测区的中心位置,供电位置如图2所示,十字交叉点为测区中心点,两个电极之间距离为75~80 m。
2 低空航磁系统
三角翼动力滑翔机低空航磁系统是以动力滑翔飞行器为载体,整合当前先进的软、硬件技术,进行低空高精度航磁测量的系统,由动力滑翔飞行器、导航控制器、磁测系统、补偿系统、定位系统和数字化采集系统六部分组成,如图3所示。其中,飞行载体系统包括了飞行器、导航控制和传感器搭载,磁测系统包括氦光泵磁力仪和饱和式三分量磁力仪,数据采集系统是中国船舶重工集团公司第七一五研究所研制的GB-10型磁测采集器[1]。

图1 测区方位示意图

图2 测区与供电位置

图3 动力滑翔机低空航磁系统组成
在飞行器上装配实时航空定位装置,作为定位定时使用。预置飞行测线,控制飞行航向,通过主机接收测量信号,指挥飞行过程。采用前置固定式传感器搭载架,配合后置式发动机,减少飞机自身干扰、飞行影响和气流影响等。
3 地磁背景场调查
地磁背景场调查测量实际航迹图如图4所示,其中主测线呈东西走向,检查线呈南北走向。主测线飞行测量采用预置飞行测线进行导航定位,测量过程中根据显示屏上的导航测量信息飞行并实时记录航迹。飞行高度300 m,每100 m布设一条测线,中间1 km为加密测线,测线间隔为50 m。检查线测量数据用于人工调平和测量数据的质量检查[2],原则上应尽可能选在平稳场和正常场区域,横贯全区,且离地飞行高度力求保持和主测线飞行时相同。

图4 地磁背景调查航迹图
经日变校正、正常场改正和系统差调平[3]等处理后,绘制地磁背景场等值线图,建立地磁背景数据库。地磁背景场等值线图如图5所示,本文等值线图只绘制了中间地带有交叉测线覆盖的边长为2 km的正方形区域。

图5 地磁背景等值线图
4 地磁匹配
地磁背景场数据库建立以后,进行磁模拟器探测。磁模拟器采用不同通电方式从而产生不同的磁场,在其所在区域范围进行飞行测线的布设,测线方向与模拟器通电方向垂直,将飞行测量的数据与相应位置处的地磁背景数据相减得到地磁匹配后的磁异常信号。
航磁测量磁场、地磁背景磁场及二者差值如图6所示,由于地磁背景磁场值很大,使得模拟器产生的异常磁场淹没在背景场中,难于识别和检测。经过地磁匹配后,异常磁场从测量磁场中分离。图7将飞行测量时的磁场直接滤波与地磁匹配得到的异常磁场滤波的效果进行对比,地磁匹配后的异常磁场特征明显,简单的平滑滤波就可以识别出异常信号,而直接对航磁测量数据进行滤波得不到准确的异常信号,或者异常信号不明显。这是由于地磁场背景较大,对信号滤波和检测产生干扰。采用地磁匹配技术,可大幅降低背景干扰,再使用滤波等技术,可获得好的效果。图8对滤波后的异常磁场进行信号识别,并将识别出的信号与磁偶极子场信号进行对比分析,300 m时信号偏差均值为0.061 nT,200 m时信号偏差均值为0.050 nT,曲线形状基本一致,磁异常信号与磁偶极子场信号的幅值和宽度都比较吻合。

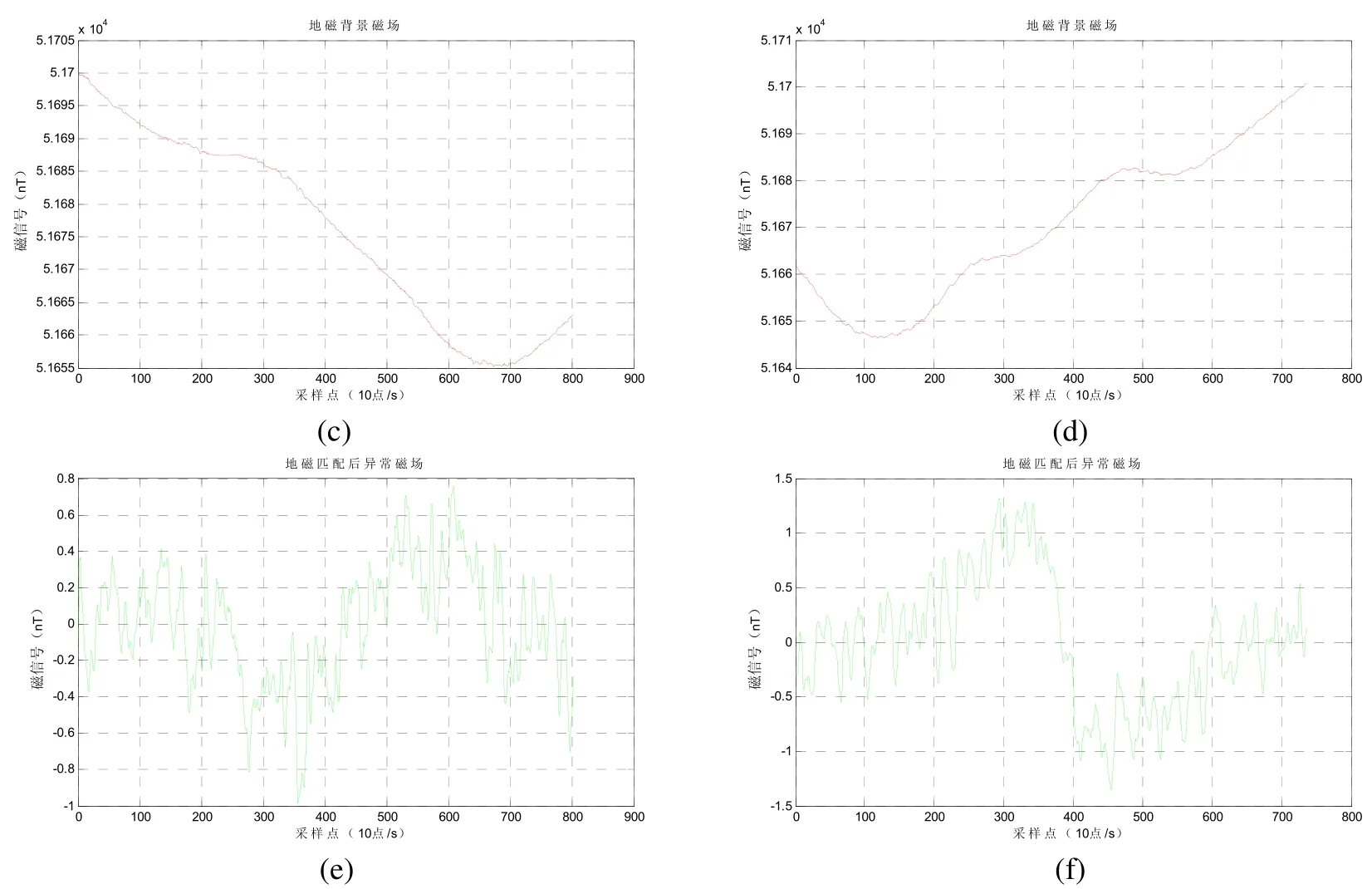
图6 航磁测量与地磁背景场比较 (a,c,e为300 m高度,b,d,f为200 m高度)
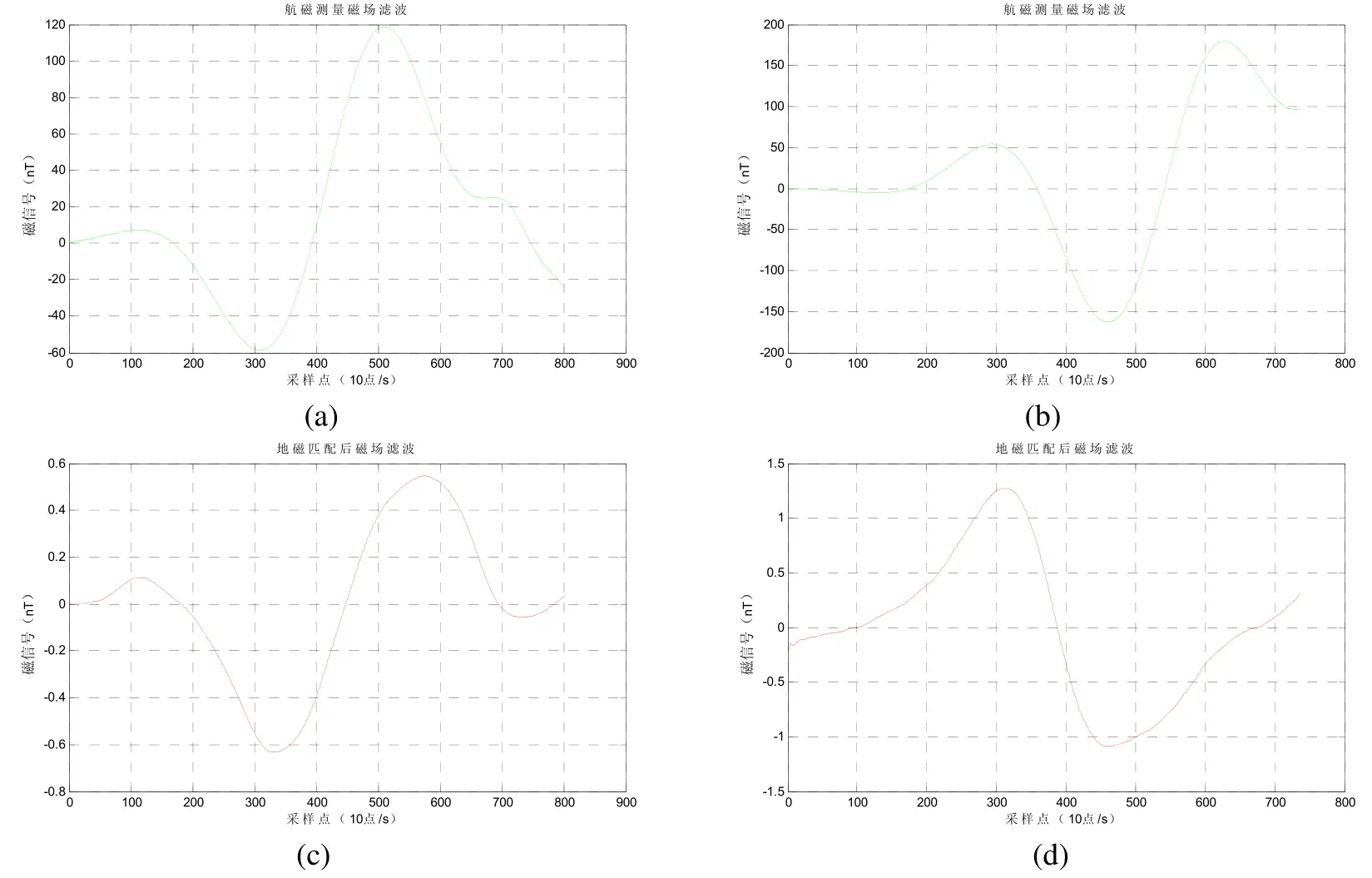
图7 航磁测量滤波与地磁匹配后滤波对比(a,c为300 m高度,b,d为200 m高度)

图8 磁模拟器探测信号与磁偶极子信号比较(a为300 m高度,b为200 m高度)
5 结语
根据磁模拟器探测的结果可以判断出,地磁匹配技术可以消除背景场的干扰,从复杂的磁测数据中分离出有效信号,对于具有较大地磁背景区域的磁异常探测具有良好的效果,结合低空磁测系统可以适用于大江大湖、沼泽区、森林区、草原、浅海滩、偏远地区及沙漠戈壁区等常规磁测无法进行的区域,使地磁匹配技术得到广泛的应用。
论文撰写得到吴文福研究员悉心指导,野外飞行数据由吴文福研究员和张谨工程师采集和整理,在此特表感谢。
[1]杭州瑞声海洋仪器有限公司.GB-10航磁测量系统使用手册[Z].2007.
[2]管志宁.地磁场与磁力勘探[M].北京:地质出版社,2005.
[3]胥值礼,孟庆敏,崔志强.基于GIS的航磁实测切割线网自动调平软件[J].物探化探计算技术,2010,32(4):423-428.
