基于CS-3的地磁日变基站设计
2017-01-20宗发保张谨周波张龙伟王景然邹鹏毅
宗发保 张谨 周波 张龙伟 王景然 邹鹏毅
(第七一五研究所,杭州,310023)
基于CS-3的地磁日变基站设计
宗发保 张谨 周波 张龙伟 王景然 邹鹏毅
(第七一五研究所,杭州,310023)
为完成高精度磁法测量和地质灾害前兆预警的地磁日变监测,用Scintrex公司的CS-3型铯光泵探头和自主研制的等相位间隔频标组计数器,集成GPS、蓝牙模块、PC104、远端显示手机设计成功了HMB-1型地磁日变基站。该日变基站在采样率为10 Hz时的计数分辨率为0.4 pT,野外实测地磁日变数据的静态四阶差分噪声小于3 pT,满足“DZ/T 0142-2010 航空磁测技术规范”规定的一级数据要求(静态四阶差分噪声≤10 pT)。
CS-3;地磁;日变基站;设计
地球磁场是随时间和地区改变而变化的[1-3],在一天内的变化幅度高达数十nT。在高精度磁法测量中必须同时监测地球磁场随时间的变化(亦称日变监测),在磁法数据处理前需要进行日变校正,以消除地磁日变带来的误差。此外,地磁日变监测还可以提供地震、火山喷发等地质灾害的前兆预警[4-6]。
光泵磁力仪是以工作物质原子在磁场中发生的塞曼能级分裂为基础,结合光泵作用和磁共振现象研制而成的磁力仪[7],具有噪声低、精度高等优点,被广泛应用于航空物探、航空反潜、海洋磁测工程等领域。目前,国内使用比较广泛的光泵磁力仪有中国船舶重工集团公司第七一五研究所生产的GB-10、GB-4A、GB-6A多型氦光泵磁力仪、加拿大Scintrex公司生产的CS-3型铯光泵探头、美国Geometrics公司生产的G858、G880/G882多型铯光泵磁力仪等[8]。
本文设计了基于CS-3的地磁日变基站,包含Scintrex公司的CS-3型铯光泵探头、无磁三脚架、锂电池组、主机箱、远端显示手机。
1 日变基站简介
CS-3型铯光泵探头由加拿大Scintrex公司生产,也可以用国产或其它型号光泵探头替代,其输出与地磁场成正比的频率信号;主机箱由基于DSP+FPGA的计数器、PC104、GPS模块、蓝牙模块等组成。
地磁日变基站(见图1)的主要技术指标如表1所示。采样率2 Hz、5 Hz、10 Hz可选;日变记录数据采用GPS时间;数据存储空间≥32 G;主机箱与手机采用蓝牙4.0连接;主机箱可以自动检测CS-3、GPS的连接及工作状态。

图1 地磁日变基站

表1 日变基站主要技术指标
2 硬件设计
2.1 计数器模块
等精度计数器可以消除待测信号±1个脉冲误差,但无法消除基准时钟计数带来的±1个脉冲误差,可以通过提高计数闸门时间和基准时钟的频率来提高测量精度[8,9]。目前,受FPGA等器件限制,等精度计数器的基准时钟频率最高可达400 MHz,在采样率为10 Hz(闸门时间为0.1 s)时的相对误差可达2.5×10-8,磁场值为60 000 nT时对应的计数分辨率为1.5 pT。
针对等精度计数器不能消除基准时钟的±1个脉冲误差的不足,本文采用了4路等相位间隔的频标组计数器,可以将基准时钟计数的±1个脉冲误差降低至±1/4个脉冲。
如图2所示,4路等相位间隔频标组计数器在等精度计数器的基础上增加PLL相位锁定器、沿触发锁存器、基准时钟计数器修正等模块。PLL相位锁定器用于产生四路频率相同但相位间隔相差90°的时钟CLK0~CLK3,CLK0作为等精度计数器的基准时钟;沿触发器在实际闸门信号的上升沿、下降沿对CLK0~CLK3进行锁存,得到上沿锁存值A和下沿锁存值B;基准时钟计数器修正模块根据上沿锁存值A、下沿锁存值B修正基准时钟计数值,得到含小数部分的计数值NB用于磁场值计算。修正量列表如表2所示。
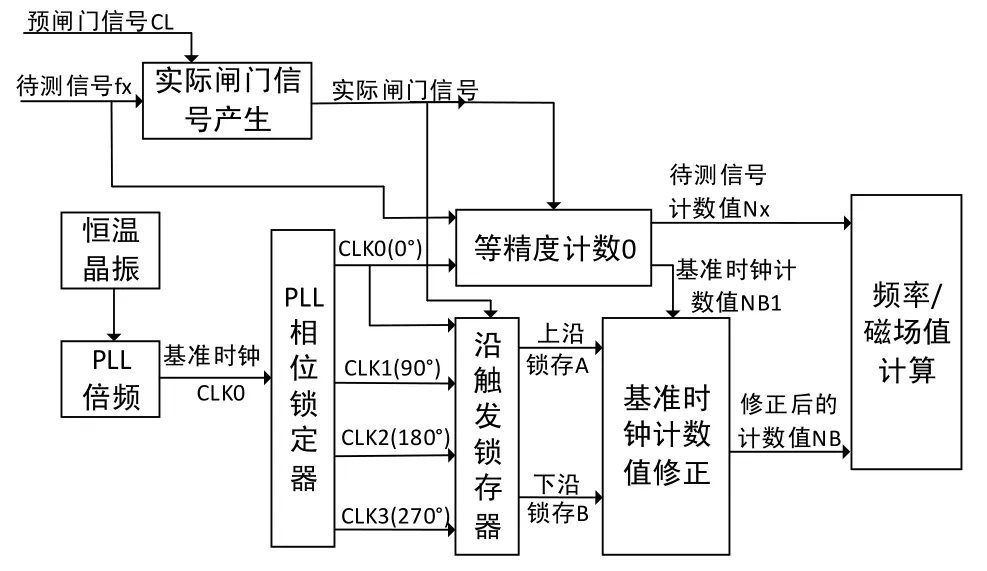
图2 4路等相位间隔频标组计数器
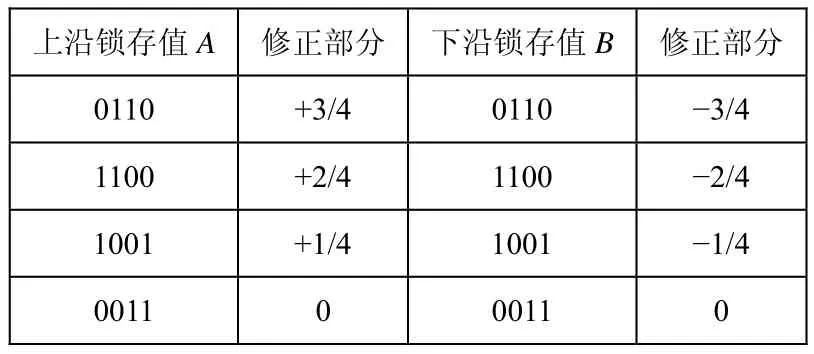
表2 基准时钟计数器修正量
该4路等相位间隔频标组计数器可以将基准时钟计数的±1个脉冲误差降低至±1/4个脉冲,将采样率10 Hz时的计数相对误差降低至6.25×10−9,对应计数分辨率为0.37 pT。
2.2 GPS模块
GPS模块选用NovAtel公司的OEMV-1型,其定位精度为1.8 m,数据输出速率可达20 Hz,时间准确度高达20 ns,功耗小于1 W。将GPS模块配置为TTL-UART输出,输出格式为$GPGGA。
2.3 蓝牙模块
蓝牙模块以主芯片CC254为核心,工作在2.402~2.480 GHz ISM频段内,蓝牙版本为V4.0,发射功率典型值为1 mW,接收灵敏度典型值为−88 dB,在连接外置天线时的通信距离可达150 m。
2.4 PC104主机
PC104为主机箱软件运行提供平台,其配置参数列表如表3所示。磁场值数据从COM2输入,GPS数据从COM4输入,蓝牙模块数据从COM3输出。

表3 PC104配置参数列表
2.5 远端显示手机
远端显示手机可以选用任意V4.0版本以上蓝牙的Android手机,能通过蓝牙接收数据并显示。
3 软件设计
3.1 主机箱软件
主机箱软件基于NET Framework 3.5,采用C#编写,完成计数器输出磁场数据、GPS数据的接收、显示、保存以及蓝牙发送,主要包含开机检测提示、实时显示、后台数据三个界面。在软件启动时会先检测CS-3铯光泵探头和计数器、GPS、蓝牙模块的工作状态,并以图3所示的对话框提示。
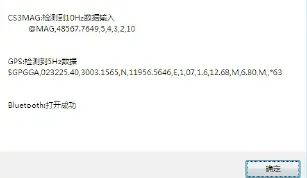
图3 软件启动时的自检提示框
实时显示界面如图4所示,其完成地磁场日变的字符和曲线显示,以及数据保存。曲线显示的纵轴自动缩放,横轴可放大缩小。

图4 显示主界面
后台数据界面如图5所示,显示当前接收到以@MAG开头的磁场值数据和以$GPGGA开头的GPS数据,以及正通过蓝牙模块发送出的数据。GPS校时按钮用于人工校时,在检测$GPGGA的时间字段有效后完成系统时间的设置,系统时间、GPS时间均会随磁场值一同保存。

图5 后台数据界面
3.2 Android显示软件
远端显示软件的主界面如图6所示,完成主机箱通过蓝牙接口发送数据的显示,操作者可以通过手机在远处监视地磁日变站的工作状态。
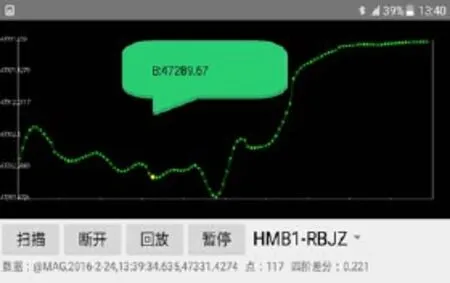
图6 Android显示软件主界面
4 试验与测试情况
地磁日变基站的整机实物图见图7。主机箱与CS-3铯光泵探头的电缆长度为10 m,主机箱与远端显示手机蓝牙通信稳定的距离在空旷地方可达150 m。
地面静态四阶差分噪声是民用地面磁力仪最重要的技术指标,其代表着磁力仪的噪声水平和数据平滑程度。在“DZT 0142-2010 -《航空磁测技术规范》”第8.3.2.1条中规定的磁力仪地面静态四阶差分噪声Sn的计算方法如下:

其中,n为参加计算的总数据点数;i=1,2…n为数据序列号;iT为连续记录下的磁场值序列;为瞬时四阶差分值;为瞬时四阶差分值的均值。

图7 日变基站整机实物图
图8为日变基站在野外实测数据的情况,(a)为地磁日变曲线,(b)曲线为地面静态四阶差分噪声。可以看出,全程静态四阶差分噪声Sn≤2.6 pT,满足“DZ/T 0142-2010 航空磁测技术规范”规定的一级数据要求(地面静态四阶差分噪声≤10 pT)。


图8 野外实测地磁日变曲线及静态噪声情况
5 结语
鉴于等精度计数器无法消除基准时钟计数±1个脉冲误差的不足,本文基于DSP+FPGA自主研制了等相位间隔频标组计数器,其在10 Hz采样率时的计数分辨率为0.4 pT。在集成GPS、蓝牙模块、PC104、远端显示手机后设计成功了HMB-1型地磁日变基站。
该日变基站野外实测地磁日变数据的静态四阶差分噪声小于3 pT,满足“DZ/T 0142-2010 航空磁测技术规范”规定的一级数据要求(地面静态四阶差分噪声≤10 pT)。在保定物勘院自主开展的对比试验中,该日变基站的综合性能与进口自加拿大pico公司的PBM日变基站性能相当,可以作为CS-3型铯光泵探头的国产化配套设备供物探部门应用。
本文是在吴文福研究员的细心指导下完成的,保定物勘院从用户使用的角度对地磁日变基站提出了许多宝贵意见,在此对他们及相关参与该项研究的工作人员表示衷心感谢。
[1]佟成冶.高精度磁测日变站和基点选择方法与精度研究[J].工程技术,2010,35:109.
[2]石杰,董庆亮,李进勇,等.地磁日变测量系统便携化方案研究[J].海洋测绘,2012,32(1):52-54.
[3]徐行,廖开训,盛堰.海底地磁日变观测站的设计与应用[J].海洋测绘,2005,23 (1):67-69.
[4]李延峰,朱胜伟,杨广华.格尔木地磁Z分量静日变化特征与前兆异常分析[J].高原地震,2013,25 (1):35-41.
[5]胡久常,刘伟,郭敏瑞,等.汶川8.0级特大地震前的地磁垂直分量变化“双低点”异常[J],地震学报,2009,31 (5):589-593.
[6]张翼,杨福喜,和锐.乌鲁木齐地磁Z分量日变幅及其逐日比地震前兆分析[J].内陆地震,2007,21 (1):78-85.
[7]邹鹏毅,罗深荣,顾建松.两型光泵磁力仪比对试验结果及分析[J].声学与电子工程,2010,(2):35-37.
[8]宗发保,郭昌华.基于EPM240和MSP430的等精度频率计[J].吉林大学学报(信息科学版),2012,30 (5):482-496.
[9]张谨,宗发保,邹鹏毅 等.基于FPGA的铯光泵磁力仪频率计设计[J].海洋测绘,2015,35 (2):79-82.
