氦光泵磁力仪的应用与发展研究综述
2017-01-20吴文福袁皓
吴文福袁皓
(1.第七一五研究所,杭州,310023)
(2.中国船舶重工集团公司规划发展战略研究中心,北京,100861)
氦光泵磁力仪的应用与发展研究综述
吴文福1袁皓2
(1.第七一五研究所,杭州,310023)
(2.中国船舶重工集团公司规划发展战略研究中心,北京,100861)
阐述氦光泵磁力仪的工作原理,并对其在国内外的应用现状进行了比较,简单概括我国发展磁力仪的研究方向和技术难点。
氦光泵磁力仪;应用现状;发展趋势;综述
磁力仪是一种可测量其所处位置磁场值、磁场梯度、磁倾角、磁偏角的仪器,常用于地质、矿产、石油、古遗址的勘探和金属产品内部缺陷检测。俄罗斯曾用磁力仪成功预报了地震,高灵敏度的磁力仪还可用于脑部和心脏的疾病诊断。磁力仪的种类包括磁通门磁力仪、质子旋进磁力仪、超导磁力仪、原子磁力仪,它们的静态灵敏度分别为100 pT/√Hz、50 pT/√Hz、1 fT/√Hz、10 fT/√Hz级别。其中,原子磁力仪中的光泵磁力仪具有体积小、灵敏度高、可工作于常温等优势。
原子磁力仪是利用原子能级在外磁场作用下所产生的赛曼效应,进而实现对外磁场进行高灵敏度测量的仪器统称。基于氦原子的磁力仪技术发展历时已久,第一套商用的氦原子磁力仪出现于20世纪60年代,由美国德州仪器公司研发。早期的氦原子磁力仪采用气体放电灯作为光源,随着20世纪80年代以来不断发展成熟的固体激光器技术、半导体激光器技术以及光纤激光器技术,使得利用激光器代替传统气体放电灯作为氦原子磁力仪的光源成为可能[1-5]。相较于气体放电灯,激光具有强度高、波长可调谐、单色性好等优势。理论及实验研究均表明,利用激光作为光源,会使得磁力仪的探测灵敏度提高两个量级。发展至今,激光光泵氦原子磁力仪已得到广泛应用,尤其是在军事以及空间探测领域,氦原子光泵磁力仪都占据着不可替代的地位[6]。
1 基本原理概述
原子磁力仪是通过测量He4、He3和碱金属的Cs133、Rb85、K39等原子的磁距在磁场中的进动频率从而计算出磁场值的仪器。如图1所示,对一个原子系统,当在z方向存在静磁场B时,原子磁距绕磁场进行进动,角动量为M,但是每个原子的进动相位并不一致,进动频率为:WL=rB,其中r为旋磁比。此时原子能级发生分裂,图2为氦原子的塞曼效应能级图。只要测出进动频率WL,就可依此计算出磁场值B。为了测出磁距进动频率WL,可采取的方法有射频驱动和光驱动。本文以射频驱动为例说明磁力仪工作的原理。

图1 原子在磁距中的进动示意图

图2 氦原子在磁场中的能级图
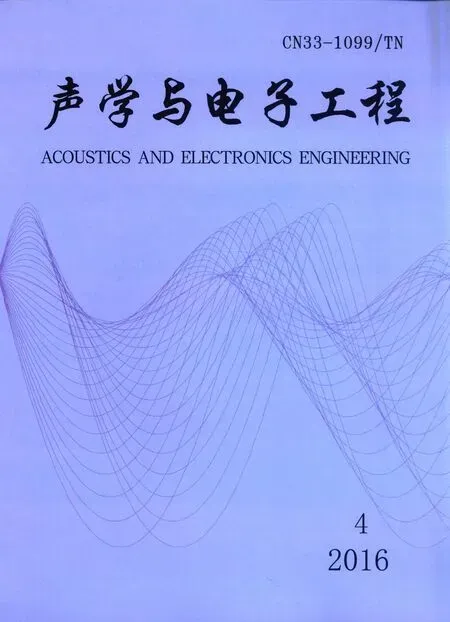
射频驱动Mz磁力仪如图3所示,以氦光泵(r=28.023 5 Hz /nT)为例,假设磁场方向为z,在z方向加上波长为D1跃迁线的左旋圆偏振泵浦光(同时作为探测光)。根据跃迁定则,亚稳态23S1上塞曼能级MF=0、MF=−1上的原子跃迁到激发态23P1上,然后又回落到亚稳态23S1上。因为亚稳态23S1上MF=1的原子不发生跃迁,最后大多数原子处于亚稳态23S1上MF=1的磁能级上,达到粒子数反转的动态平衡状态。此时原子系统不再吸收光能,透射光强达到最大。在x方向加上射频扫频信号,当射频信号的能量与磁能级能量相等(hf=gμB,其中h为普朗克常数,f为射频频率,g为朗德因子,μ为波尔磁子,B为磁场值)时原子发生受激辐射,粒子数反转被破坏导致系统又重新吸收光能以实现粒子数反转,此时透射光强减小,图4所示为磁共振信号。通过在信号上加上一定频率的调制,可实现对最大信号的跟踪,从而跟踪磁场值。
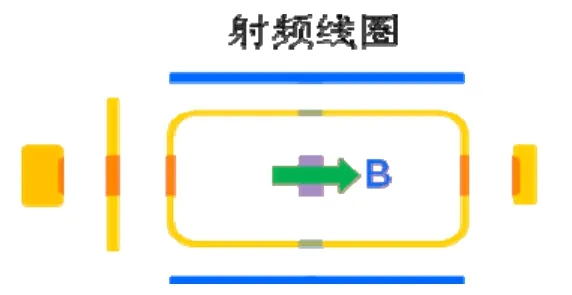
图3 氦光泵Mz磁力仪结构示意图

图4 氦光泵磁力仪信号
2 国外研究应用概况
2.1 各国磁力仪研究应用现状
当前,美国的Geometrics、加拿大的Scintrex、英国的Bartington等几家国外公司几乎垄断了全球商品磁探仪的市场。这些公司的磁探仪产品发展起步早、种类多、可靠性好,且已经占据了全球绝大部分市场。
美国的Geometrics公司已从事电法、磁法工程研究超过40年,其磁探仪产品涵盖地面、航空、海洋应用。地面磁探仪主要有G-858、G-859、G-856和G-857等型号;航空磁探仪主要有G-822A、G-823A、G-824C和G-862等型号;海洋磁探仪主要有G-882、G-882TVG和G-880等型号。另外,Geometrics公司宣称,已采用先进的半导体激光技术和MEMS技术,研制成功了微制造磁传感器AFAM,将铯光泵探头长度由279 mm减小至3.9 mm。这项研究得到美国国防部先进研究项目局DARPA和战略环境研究发展计划SERDP支持,目前已取得关键突破,相关产品将陆续上市。
加拿大Scintrex公司在重力、磁探、电法勘探方面的研究超过70年。磁探仪产品主要包括CS-L、CS-VL和CS-3等铯光泵磁力仪。其中,CS-3铯光泵磁力仪在中国销售了百余台,其pT级的噪声和简便操作赢得了用户的好评。
英国Bartington公司主要从事磁通门磁探仪的研究,80%的产品均用于出口。单分量磁通门磁探仪的型号有MAG-01、MAG670、MAG678和MAG679;三分量磁通门磁探仪有通用型MAG-03、MAG612等。低功耗型MAG648、MAG650等;航空型MAG628;恶劣环境型MAG610、MAG613等;数字型MAG657、MAG658;三分量梯度仪GRAD-01、GRAD-13、GRAD-03ACU等。这些磁通门磁探仪被广泛销往全球各地。
2.2 美国氦光泵磁力仪的发展
美国的氦光泵磁力仪广泛应用于航空磁场探测中,因其探头不需要维持恒温而具有较好的环境适应性。由于氦的旋磁比较高,通常氦光泵磁力仪采用跟踪式方案。当地磁场方向与光轴平行时磁信号最大,垂直时磁信号消失,氦光泵通常采用多光系消除探测死角。到目前为止,氦光泵磁力仪的发展经历了模拟式、数字式和激光磁力仪几个阶段。
2.2.1 AN/ASQ-81(V)氦光泵(He4)磁探仪
1972年开发的AN/ASQ-81 (V) 拖曳式氦光泵磁力仪(图5),是一种生产批量最大的航空探潜用磁异常探测器,主要包括磁力仪探头、拖鱼、探测控制器、放大器和电源、探头发射/回收装置等部分,不包括磁补偿器和磁异常信号处理机。固定翼飞机上安装的固定式AN/ASQ-81(V)-1,直升机安装的拖曳式AN/ASQ-81(V)-2。两者都是模拟式磁探仪,探头采用多光系方案,静态噪声为9 pT(0~216 Hz)。进行磁场探测时,探头发射装置释放探头,将探头拖曳在远离机体处以减少飞机的磁噪声,适用于飞行速度和高度较低的航空磁探场合。
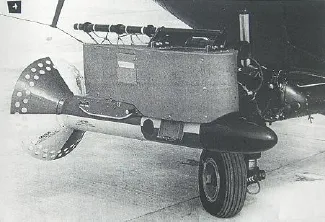
图5 AN/ASQ-81氦光泵磁探仪外形图
2.2.2 AN/ASQ-208(V)MAD系统
AN/ASQ-208(V)是由AN/ASQ-81(V)派生出来的一种新型数字式磁探仪,其工作原理仍然是氦光泵式磁异常检测器。它综合了微处理器技术,用以解决飞机磁干扰补偿、多通道数字滤波、显示及阈值处理等。该系统可以在线通过1553B数字接口控制或不在线通过控制显示单元控制。为了实现整体化,仪器自身具备一个RS-232接口,可以直接同标准PC机连接,以便于显示和存储数据。与AN/ASQ-81(V)相同,有固定和拖曳两种安装方式,可很方便地安装在新机型或替换以前AN/ASQ-81(V)安装的机型。由于采用数字信号处理技术,作用距离比AN/ASQ-81(V)有较大幅度提高,在深海区提高25%,在浅海区提高50%。

图6 AN/ASQ-208氦光泵磁探仪探头外形图
2.2.3 AN/ASQ-233激光双室氦光泵磁力仪
在美海军支持下,Polatomic公司又开发出激光氦光泵磁力仪(如图7)。其灵敏度是AN/ASQ-208(V)灵敏度的10倍,达0.3 pT/√Hz。已经完成了在P-3C反潜机上的试验。
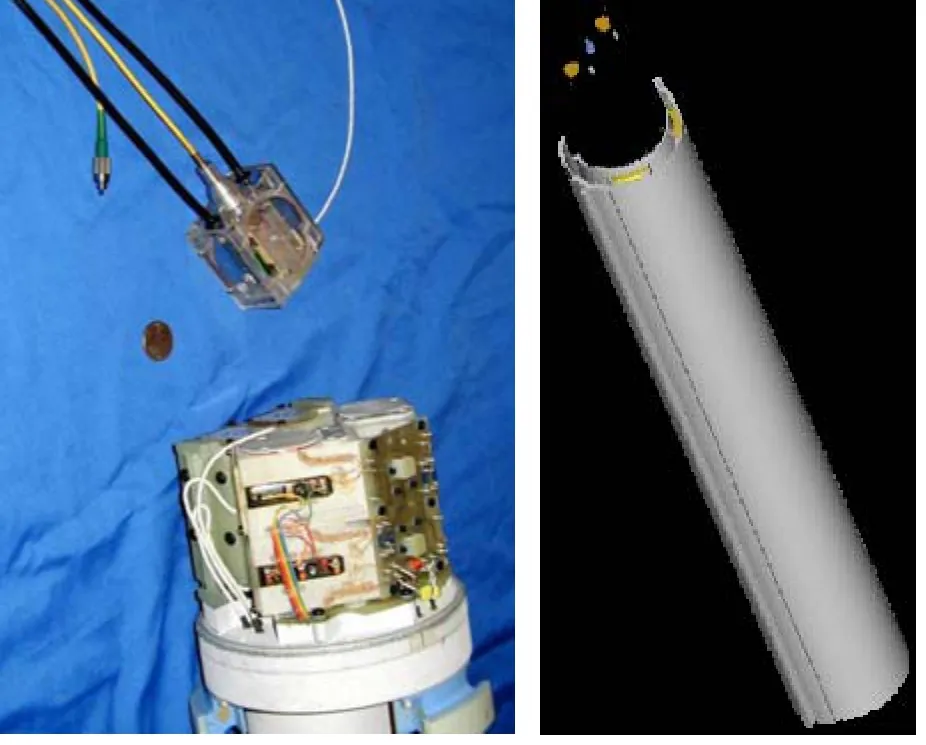
图7 激光氦光泵磁力仪
3 国内发展应用现状
国内上世纪六十年代末开始氦光泵磁力仪研究,产品主要装备反潜巡逻机用于航空探潜。九十代开始军转民产品开发,主要用于航空地球物理勘探,包括地面磁力仪、航空磁力仪、海洋磁力仪。目前,开发的GB-5A型、GB-6型和GB-6A型三种型号的数字式氦光泵海洋磁力仪已投入使用,初步具备与国外同类仪器展开竞争的能力。
3.1 航空探潜
航空磁异常探潜技术是反潜巡逻机的主要装备之一。由于潜艇磁异常信号不受空气、水文变化、泥沙等影响,在对潜艇定位和攻击时,使用磁探仪进行最终确定,是国外航空探潜的通用战术。反潜巡逻机有固定翼和旋翼两种。对于固定翼飞机,一般采用磁传感器的固定安装方式,旋翼飞机大多采用拖曳式,以回避飞机磁干扰的影响。经过数十年的不懈努力,以光泵磁探仪为代表的各型高灵敏度磁探仪开发成功,仪器噪声水平已经可以和超导磁探仪媲美,接近环境磁噪声。由于超导磁探仪需配置低温装置,现役的探潜磁探仪几乎均采用光泵磁探仪。
国内自行研制的航空探潜用磁异常探测器采用氦光泵磁探仪方案,第一代产品GTC-II型于1985年提供Be-6和SH-5水上飞机试用。第二代产品H/SKC-1型于1998年通过原理样机鉴定。新研制的数字式氦光泵磁力仪已装备在某型反潜巡逻机上,其综合性能较前两代产品有大幅提升。
3.2 地球物理勘探
1986年开始的军转民产品GB-4A加装在运-12、运-11B、运-5等航空物探用飞机上,从事航空地球物理调查。近年来,针对无人机任务系统,在小型化、数字化基础上开发了GB-10系列[7](见图8),成功用于低空小面积航磁测量,在非洲及国内承接航空物探任务,直升机、三角翼、飞艇、无人机等各种飞行器都能适装。图9为三角翼动力滑翔机低空磁测热带森林,该地区有北东向的侵入岩株,磁异常分布在岩株周围。上图为低空磁测平剖图,下图为遥感图。

图8 GB-10航磁测量系统

图9 三角翼动力滑翔机低空磁测方法适用性和应用效果
GB-10型航空磁力仪将氦光泵磁力仪、自动磁补偿器、高精度GPS集成在一个主机里,可接收机上飞控系统数据输入、激光高度计或雷达高度计数据输入,内置操作系统,可在各种对载荷要求苛刻的小型飞行器上无人值守工作。自动磁补偿器对飞机机动引起的磁干扰进行自动补偿,使最终的采集数据符合航磁测量要求。图10中蓝线为未补偿的磁力仪数据(A),红线为加拿大航空自动数字式磁补偿器AADC的补偿输出数据(B),绿线为中船重工第七一五研究所的磁补偿器补偿的数据输出(C),B、C几乎重合。

图10 自动磁补偿器补偿前后对比
安装在远离飞机的无磁性磁探杆内的磁探仪受到飞机各种磁干扰的影响,如起落架等引起的永久磁场、操纵钢索等引起的感应磁场、机身铝蒙皮等引起的涡流磁场,这些磁干扰比探测的磁异常要大数十倍,需要采用磁补偿技术降低磁干扰。飞机磁干扰补偿方案有两种:测干扰补干扰和测地磁补干扰。前者国外专利介绍中有利用三分量磁力仪测量磁场梯度而得到磁干扰值[8],也有用两套总场磁力仪形成梯度测量测得磁干扰值[9]。后者则是基于Tolles-Lauson方程对飞机磁干扰进行描述而建立起飞机磁场方程。磁补偿分为硬补偿和软补偿。硬补偿是在传感器上产生大小与磁干扰相等、方向相反、变化规律相同的补偿场。典型的硬补偿器是AN/ASQ-65,补偿后的品质因素为1 nT左右,补偿时间约30 min。软补偿是由计算机处理磁干扰的各项系数,最后用软件组合成补偿场。磁探仪输出已补偿的信号,补偿后品质因素可达0.45 nT,补偿时间只需6~8 min。
3.3 海洋磁力仪
海洋磁力仪可用于以下目的:探测与定位未爆军火,航道、锚地、港口等泥下障碍物;海底管道、海缆路由调查及障碍物探查;考古及船骸和其他各种铁磁体的探测与定位;探测水雷,尤其是沉底雷探测与定位;海洋地磁背景场调查和数据库的建立,利用这一数据库,将有助于提高对重要海域和复杂背景场海域的航空磁探潜能力。
3.3.1 GB-5A型
GB-5A型海洋磁力仪如图11所示,其功能定位和配置相当于G881。GB-5A型海洋磁力仪按综合探测系统设计,可集成GPS导航定位系统、测深仪和拖体入水深度计等其它传感器的信息。GB-5A标准配置的拖缆长度为60 m,适合于小渔船作业平台,在近海锚地、航道及码头等海域的水下小目标勘查作业,灵活方便。

图11 GB-5A海洋磁力仪
3.3.2 GB-6型
GB-6型海洋磁力仪如图12所示,其功能定位和配置相当于G880,适宜深水环境和大船作业。标准配置的拖缆长度达到500 m以上,重点应用于深海地磁调查,通过加装迫降翼来控制拖体的入水深度,也可用于泥下障碍物探测与定位。

图12 GB-6型海洋磁力仪
3.3.3 GB-6A型
GB-6A型海洋磁力仪如图13所示,其功能定位和配置相当于G882,属于便携式的小型仪器。其技术性能与GB-6型数字式氦光泵海洋磁力仪相当,但在拖体小型化和定深技术上有重大改进。GB-6A采用数字一体化设计技术,将数字式小型化高精度氦光泵磁力仪全部安装在水下拖体内,其控制显示和数据处理由测量船上的综合处理机实现。2009年,在某重要海域探雷工程中,使用GB-6A进行大面积扫测,并对水雷实体的磁场特性进行了建模分析和数据处理,从3 000多个磁异常点中筛选出30多个可疑目标,经下水探摸确认其中两个目标为二战时期的遗存水雷(其中一颗已引爆,2009年4月14日CCTV对此作了新闻报道)。

图13 GB-6A型海洋磁力仪
GB-5A、GB-6、GB-6A型海洋磁力仪性能见表1,从表中可知,它们与国外海洋磁力仪的标称精度基本相当。
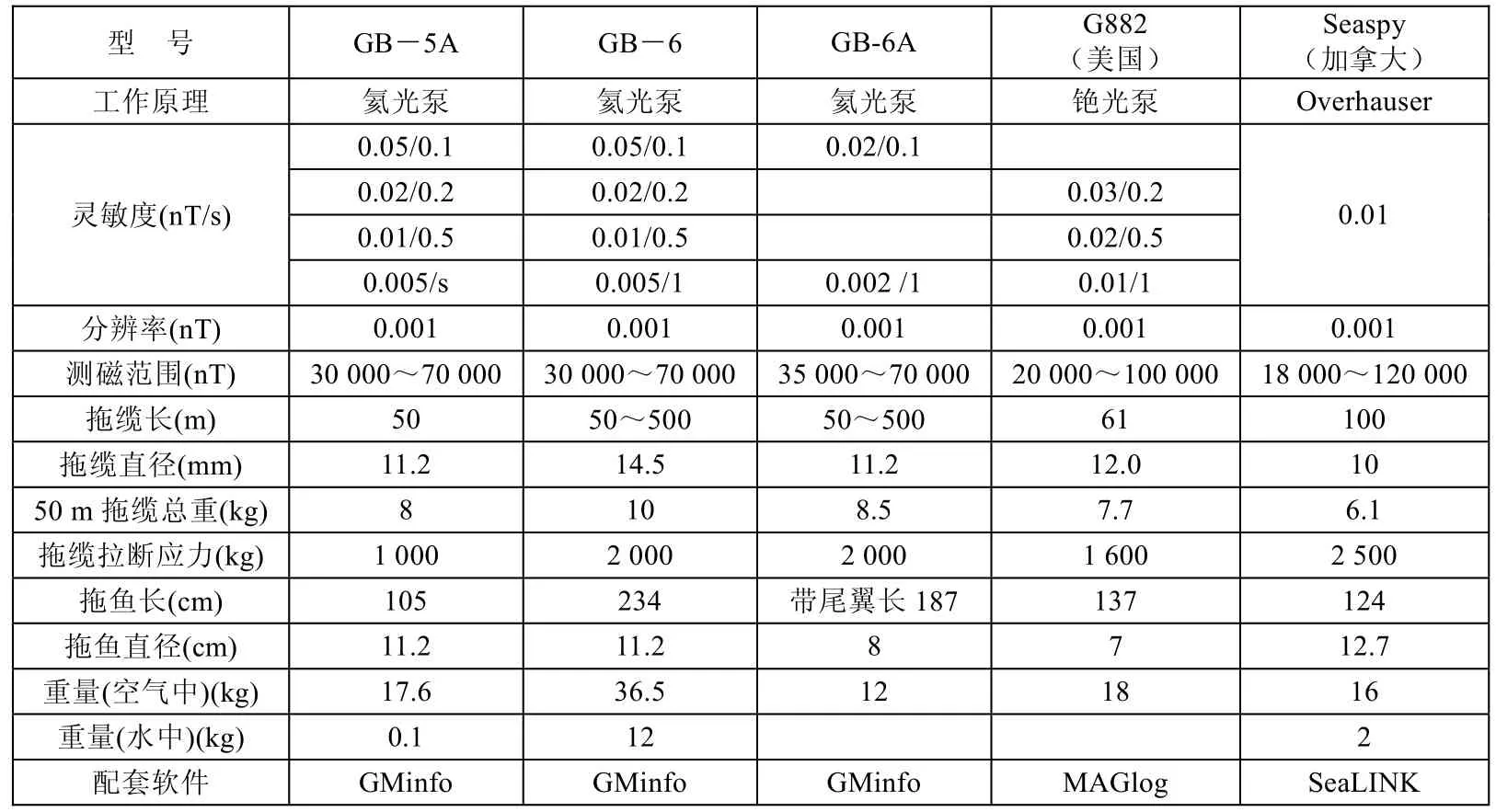
表1 国内外最新海洋磁力仪主要性能对比表
4 存在问题及技术发展趋势
4.1 提高仪器稳定性和可靠性
重点是改进氦光泵灯、室制作工艺。在氦气提纯、超高真空系统充气和充气压力控制、制作过程中采用机械化操作,对各工序进行过程控制,以及研制专用测试仪表定量检测性能等,都能有效提高氦光泵灯、室磁-光-电转换灵敏度、以及稳定性和可靠性。
4.2 降低仪器噪声
总体设计中,充分考虑一体化设计。从抗EMI技术三要素着手(干扰源、传输通道、接收通道),有针对性地加以解决。
4.3 小目标磁异常定位与识别
对于小目标探测,基本上可以将目标看成为磁偶极子,利用数字滤波技术和埋深估计技术实现小目标探测。另外通过收集整理常见水下目标的磁场测量数据,形成目标磁异常数据库,总结其磁性特征规律,为水下目标的识别提供依据。
4.4 开展全光光泵磁力仪技术研究
与光磁双共振效应的光泵磁力仪相比,基于激光调制技术的全光光泵磁力仪[10]在消除磁力仪探测盲区以及方向误差方面,具有显著的优势。
首先,在外磁场方向发生变化时,磁共振信号的幅值单一地决定于激光光场的偏振方向与外磁场方向之间的夹角;其次,全光光泵磁力仪在集成多探头时,各探头之间不存在相互串扰,因此可以实现光泵磁力仪的阵列,增强对磁异常信号的检测能力。
[1]MCGREGOR D D.High-sensitivity helium resonance magnetometers[J].Rev.Sci.Instrum.1987,58:1067.
[2]GILLES H,HAMEL J,CHÉRON B.Laser pumped He4magnetometer[J].Rev.Sci.Instrum,2001,72:2253.
[3]AMINOFF C G,LARAT C,LEDUC M,et al.Optical pumping of helium with arc lamp excited LNA lasers[J].Rev.Phys.Appl.1989,24:827.
[4]CHUANG T,METCALF H J.Tunable diode-laserpumped solid state LNA laser for helium spectroscopic experiments[J].Appl.Opt.1991,30:2495.
[5]TASTEVIN G,GROT S,COURTADE E,et al.A broad band ytterbium-doped tunable fiber laser for He3optical pumpingat 1083 nm[J].Appl.Phys.B,2004,78:145.
[6]张昌达,董浩斌.量子磁力仪评说[J].工程地球物理学报,2004,1(6):499-507.
[7]吴文福,余恺,张谨.RS-GB-10B型磁力仪手册[Z].2005.
[8]WALLAUER STEFFEN.Magnetic field compensation:US,8598869 [P].2013-12-03.
[9]BUSCHBECK HERBERT,STENGL GERHARD.Compensation of magnetic fields:US,7436120 [P].2008-10-14.
[10]CASSIMI A,CHERON B,HAMEL J.He4optical pumping with intensity modulated laser[J].Journal de physique,1991,1(2):123-133.
国家863计划(高灵敏度原子磁力仪技术,NO:2013AA8112005)
国家863计划(高精度地面量子磁测技术与装备,NO:2014AA06A611)