PRO/E行为建模运动学分析图像应用简析
2017-01-12汪秀珍詹建军
汪秀珍 詹建军
(武汉工程职业技术学院 湖北 武汉:430080)
PRO/E行为建模运动学分析图像应用简析
汪秀珍 詹建军
(武汉工程职业技术学院 湖北 武汉:430080)
介绍了基于Pro/E行为建模的机构优化设计基本步骤,以牛头刨床为例,对机构进行运动学分析并优化,对优化过程中产生的各种图像进行分类、分析,利用图像信息掌握机构运动性能及工作特性,并应用于设计工作。
行为建模;运动学;优化设计
行为建模功能是Pro/Engineer的一个功能扩展模块,作为参数化设计中的分析工具,其主要作用是在参数的作用下,经过约束参数设定,从中找出合适的模型参数,并通过改变参数来改变模型的结构外形,从而使设计过程更加智能化,更有效率[1]。在进行分析过程中系统会生成各种图像,这些图像里含有大量的信息,合理解读并应用这些图像信息有助于更深入地理解参数化模型。而对于各种运动机构模型,其运动参数是分析评价该机构工作性能的重要标准,因此常常利用行为建模中的运动学分析功能得到各种运动学分析图像。本文以牛头刨床优化设计过程为例,详细论述运动学分析过程中得到的各种图像及其应用意义。
1 牛头刨床简介
牛头刨床由于刨刀结构简单,刃磨方便,在加工窄长平面时,可以得到较高的生产率,因此刨床在单件小批生产中仍被广泛应用[2]。普通牛头刨床的主运动机构如图1所示,由曲柄摆动导杆机构和摇杆滑块机构组合而成。原动件是曲柄2的转动,输出运动是滑块6的往复直线运动,即刨刀的往复直线运动。
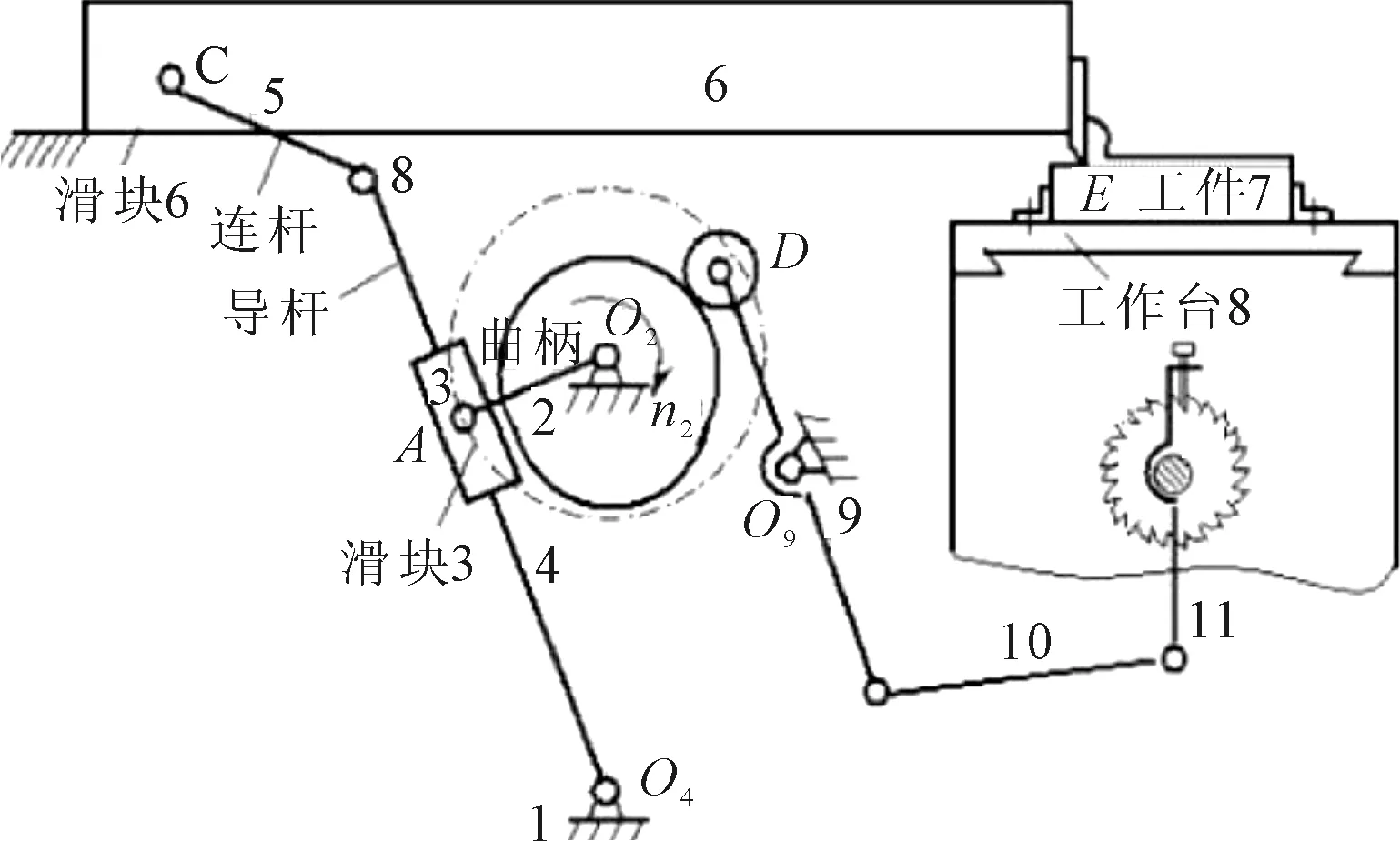
图1 牛头刨床主运动机构
2 Pro/E行为建模运动学分析图像类别及其应用
应用Pro/E建模功能建立牛头刨床主运动机构的三维模型,并在机构模块完成机构的运动定义。
2.1 机构的运动学分析图像及应用
执行机构模块的运动学分析后,利用测量工具生成该分析的测量结果,可以得到不同构件的位置、速度、加速度图像。图2为利用测量工具生成的滑块顶点即刨刀的相关图像,最后为三个参数的叠加图像。图像中的横坐标代表机构运动时间,总时间为36分钟,即曲柄回转2周,机构完成2个周期的运动;纵坐标分别代表位置坐标、速度及加速度的大小及方向。
利用图像可以对滑块的运动有基本的认识:据位置图像滑块的纵坐标呈周期性变化可知,滑块做往复的直线运动;据速度图像可知运动过程中速度不断地变化,且在0~5分钟和10~18分钟这个过程速度始终比较小,而5~10分钟这个过程速度比较大;据加速度图像可知,加速度在大约7.5分钟左右达到峰值,并且在0~5分钟和10~18分钟接近零值,即滑块的速度变化很小。再结合牛头刨床的加工过程,可以得到更具体地认识,在5~10分钟,滑块位置坐标逐渐减小,对应刨刀的不加工行程,此时为了提高生产效率,希望其运动速度越大越好,减少加工辅助时间;而0~5分钟和10~18分钟内滑块的位置坐标逐渐增大,对应刨刀的工作行程,为了保证刨刀对平面的刨削质量,希望其运动速度适宜且最好保持匀速运动,即加速度近似为零。由此分析可知,此机构的运动特性是满足刨床的加工需要的。

图2 牛头刨床机构运动学分析图像
2.2 分析特征的敏感度分析及应用
2.2.1 分析特征的建立
执行完运动学分析后返回标准模块,建立分析特征,类型是运动分析,然后运行上述位置、速度、加速度三个参数,可以得到这三个参数的详细最值信息如图3所示。
利用系统功能将最大、最小位置坐标及时间创建为参数,继续建立分析特征,类型是关系,对参数进行运算,得到滑块的行程H和行程速比系数K这两个分析特征,创建方法如图4所示。仍然结合牛头刨床的加工实际分析,滑块的行程H对应于刨刀的刨削加工的范围,这个参数必须大于工件的长度;行程速比系数K对应于刨刀空回行程和工作行程的平均速度之比。系数越大,空回行程所占用的相对时间越短,生产效率越高,由此这两个参数是直接影响刨削加工过程的。利用特征的信息可以得到当前的行程H数值和行程速比系数K数值分别为100和2.75,即此机构加工长度应小于100,且回程平均速度是加工行程平均速度的2.75倍。

图3 滑块参数的最值信息

图4 分析特征K及H的创建
2.2.2 分析特征的敏感度分析图像及应用
在牛头刨床主运动机构模型创建过程中,定义了很多设计参数,如曲柄2、导杆4和连杆5的长度、机构转动副O1O2间距离以及转动副O2到滑块运动直线的垂直距离等。当这些设计参数变化时,定会对机构性能产生影响。如果这些设计参数都用于机构的优化设计,会加大计算量。考虑到不同设计参数对机构性能影响的程度不一样,如果能定量地表示这种影响程度,就能确定哪些是重要设计参数,并排除那些影响程度很小的设计参数,从而提高优化设计的效率[3]。Pro/E行为建模中的敏感度分析就提供了定量分析功能。图5分别为曲柄2长度、导杆4长度、转动副间距离O1O2、转动副O2到滑块运动直线的垂直距离对行程H的敏感度图像。图像中的横坐标分别代表这四个参数的变化范围(±10%),纵坐标代表行程H的取值变化范围。
首先看曲线变化的趋势:增大曲柄和摇杆的长度可以增大滑块的行程;但是增大转动副间距离O1O2及转动副O2到滑块运动直线的垂直距离会减小滑块的行程;这与通过解析法分析该机构得到的结论一致。其次看具体的数值,当希望滑块的行程为90时,可从图像中得知此时的曲柄的长度应在18,导杆在68附近取值。最后将四个图像对比着分析,当四个参数的变化量为±10%时,相应的行程H的变化量分别为20%、25%、20%和1%,由此数据我们可知曲柄长度、导杆长度、转动副间距离O1O2对行程H的影响较大,其中以导杆的影响最大。这样在进行H的优化设计时,这些参数就是重点考虑参数。

图5 行程H的敏感度分析曲线
继续依次使用曲柄2长度、导杆4长度、转动副间距离O1O2、转动副O2到滑块运动直线的垂直距离对行程速比系数K进行敏感度分析,得到敏感度曲线如图6所示。
从行程速比系数K的各敏感度曲线可知,曲柄2的长度增大时,K的数值增大;转动副间距离O1O2增大时,K的数值减小。在这两个量的变化量为±10%时,K的变化量均为29%,这两个量对K的影响均较大。另外两张图像为平行于横坐标的直线,可知导杆3的长度及转动副O2到滑块运动直线的垂直距离的改变不影响K的数值。这样在进行K的优化设计时,曲柄长度2和转动副间距离O1O2即为重点考虑参数。

图6 行程速比系数K的敏感度分析曲线
2.3 机构优化分析及应用
通过敏感度分析了解设计参数对分析特征的影响效果的基础上,可以进一步据此做机构的优化分析,即在满足一定的约束条件下,使机构的指定性能参数达到最优。例如在该牛头刨床机构中,希望在保证当前的加工效率前提下,使刨刀的加工长度最大。也就是在保证行程速比系数K保持不变(设计约束为“K=2.75”)的情况下,在一定范围内改变某些设计参数,寻找使行程H最大时(设计目标为最大化H)的设计参数值,这里选取设计变量为曲柄2、导杆4、连杆5的长度及转动副间距离O1O2、转动副O2到滑块运动直线的垂直距离。执行优化分析计算后得到该区间内的局部优化结果如图7所示,同时系统会依据优化结果自动更新模型,各构件的尺寸如结果中所示,此时滑块的行程可达到局部最大值105。

图7 机构的优化结果
3 结论
利用行为建模技术的自动求解,综合考虑产品最终所要求的功能行为以及为特殊目标所确定的约束条件,采用知识捕捉和迭代求解的智能化方法来完成设计工作,能在最短的时间内找到满足工程标准的最佳设计,大大提高了设计质量和效率。但利用该功能进行分析求解过程中系统会产生大量图像,通过这些图像描述机构的运动性能。而机构的运动参数是分析评价机构工作性能,优化机构的基本依据。本例中牛头刨床机构运动参数是否合理直接影响其正常的工作性能。这就要求使用者能掌握各种图像所反映的信息及其应用。本文论述了利用Pro/E行为建模功能进行机构优化设计的典型过程,分析了运动学分析过程中产生的各种图像及其应用,为基于行为建模的机构优化设计提供了可参考的理论。
[1] 邱会朋,杜贵明,编著.Pro/E产品现代设计方法与实例精解[M].北京:清华大学出版社.
[2] 谭雪松,周克媛,主编.机械制造基础[M].北京:人民邮电出版社.
[3] 孙艳萍.基于Pro/E行为建模技术的优化设计[J].机械研究与应用,2011(5):143-144.
[4] 鹿跃丽,陈江义,张明成,熊滨生.牛头刨床六杆机构的优化设计[J].郑州工业大学学报,1999(9):39-41.
(责任编辑:李文英)
Kinematic Analysis of PRO/E Behavior Modeling
Wang Xiuzhen Zhan Jianjun
(Wuhan Engineering Institute, Wuhan 430080, Hubei)
Taking shaping machine as an example, this paper introduces basic procedures of optimizing its system based on the Pro/E behavior modeling by running a kinematic analysis. By analyzing and sorting images from the optimizing process, we learned the performance and property of the machine and put it into the practice of designing.
behavior modeling; kinematics; optimizing design
2016-07-21
汪秀珍(1973~),女,硕士,讲师.E-mail:wangxz_wuhan@163.com
TP391.72
A
1671-3524(2016)04-0033-04
