矿山物联网双CAN通信电源监控系统研究
2017-01-10刘继文王剑雄刘小玉张银河
刘继文,王剑雄,刘小玉,太 飞,张银河
(1.河北建筑工程学院,河北张家口075000;2.张家口广播电视大学,河北张家口075000;3.石家庄银方软件科技有限公司,河北石家庄050000)
矿山物联网双CAN通信电源监控系统研究
刘继文1,王剑雄1,刘小玉2,太 飞1,张银河3
(1.河北建筑工程学院,河北张家口075000;2.张家口广播电视大学,河北张家口075000;3.石家庄银方软件科技有限公司,河北石家庄050000)
采用STM32作为系统的主控制芯片,通过STM32的双CAN通信电源接口实现长距离通信,同时设计子系统实现逻辑控制和数据以太网通信传输。采用以太网通信将CAN总线检测的核心数据传送到远端控制室进行综合监控,通过仿真和实际案例进行测试,实现了10 km用于矿山物联网的双CAN通信系统的数据检测、远程控制和信息通讯功能,达到节能目的。
STM32;物联网;双CAN总线;通信系统
由于煤矿生产条件的特殊性,矿井内现有通信监控系统的信号传输距离短、音质差,集控感知度不高,不能适应长距离传输的监测监控需求,更不能适应建设感知矿山、数字矿山的发展需求。为此,本文基于STM32、PLC、数字语音和CAN总线技术,对现有煤矿通信监控系统进行改造,实现煤矿监控通信系统的数据检测、传输、远程综合控制和保护,实现井下无人监守、提高远程智能监控和应急安全防护水平,预防和减少事故发生,实现节能与人身安全[1]。
1 系统框架
用于矿山物联网的双CAN通信系统的网络结构如图1所示。系统是基于通讯传输的CAN总线网络、STM32等综合开发设计,分成若干在物理上相互独立而在功能上又相互关联的几大部分[2]。整个系统硬件可分为PLC控制部分、检测控制部分、语音仲裁及监测部分、PIC单片机地址映射部分、外围传感器及信号采集设备等。
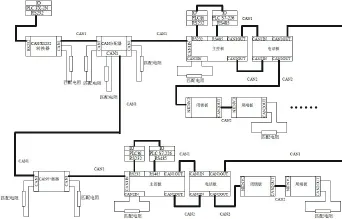
图1 系统的网络结构
2 构建典型实验系统
选用仿真导线模拟实际距离作为CAN通信实验,选用STM32的两块主板分别控制CAN2A和CAN2B总线,每条CAN2总线上设定3台STM32电话版、1台闭锁板、1台尾端板。两个CAN2总线上的STM32主板和电话板都连接到CAN1总线,且在CAN1总线上配置一台FX2N PLC作为语音仲裁设备。配置详见表1。
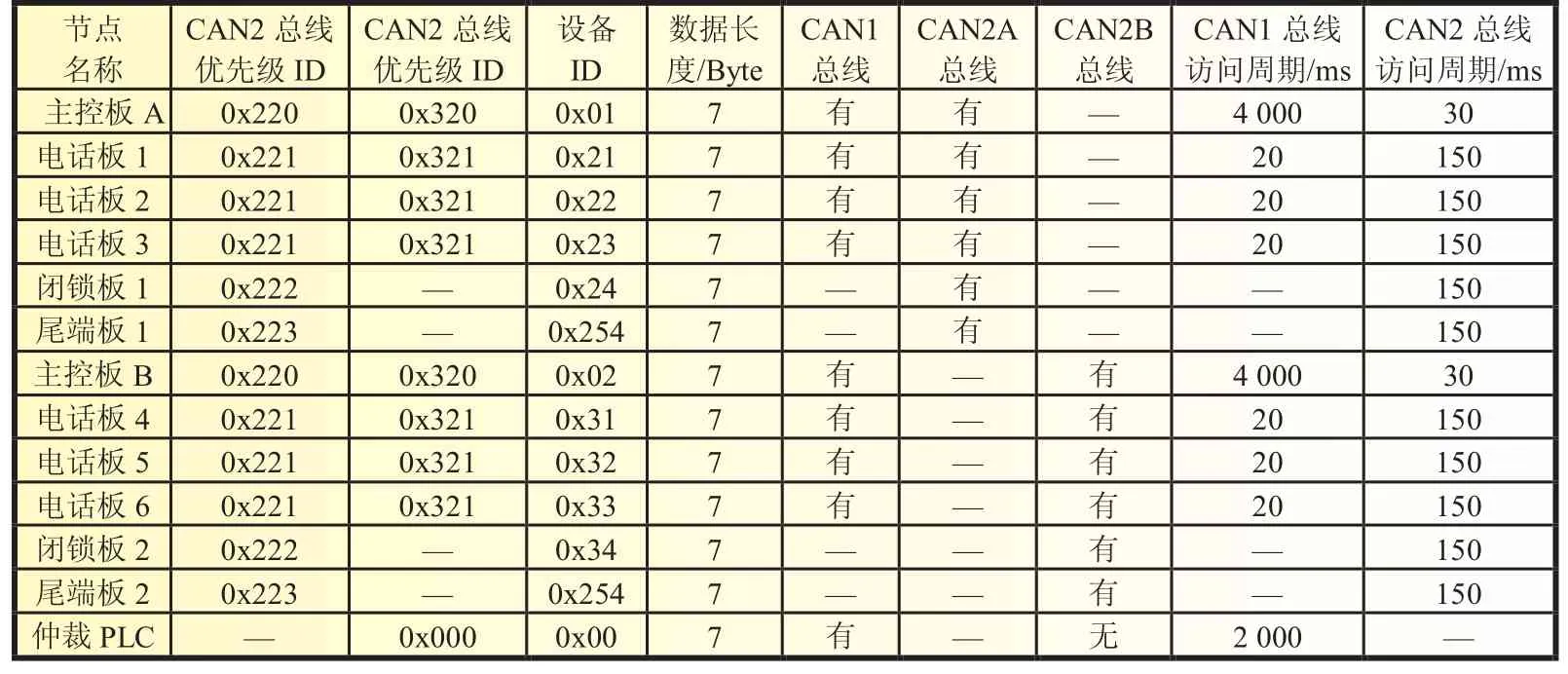
表1 系统配置参数
实验硬件选择两条CAN2总线,分别为CAN2A和CAN2B总线,每条CAN2总线定义相同配置。设备ID按照1~20为STM32主控板ID类、21~253为电话板和闭锁板的ID类、254为尾端板ID的分配原则,测试采用ZLG公司的CAN设备USBCAN及其配套测试软件CANTest来实现[3]。测试界面如图2所示。
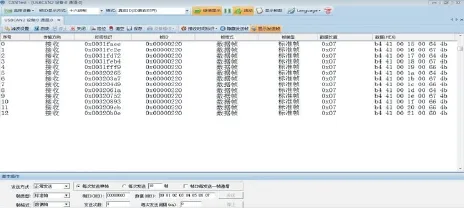
图2 CANTest监视界面
3 实验测试及验证
3.1 CAN总线测试
实验中,CAN1总线监测数据如图3所示,第0~15个数据帧为FX2N的轮询和驱动STM32主控板的数据监测报文;第72~936个数据帧为STM32电话板(0x32)按讲申请、FX2N应答允许按讲、STM32电话板获得允许按讲信息后发送语音信息等的检测报文。
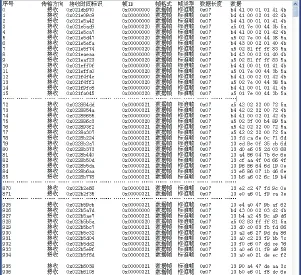
图3 CAN1总线数据监测报文
根据监测报文中的时间标识值,可计算出各数据帧之间的时间差值。FX2N仲裁PLC除了上电检测STM32主控板的时间差为9 ms和第一次接收到STM32主控板的回应时间差为61 ms之外,当系统正常运行后,FX2N的轮询时间为2 000 ms,与FX2N程序设计中的定时值相符。计算过程如下:(1)选第12号和第10号数据帧的时间标识进行求差运算:0x021f4f4c-0x021eff0f=0x503d(20541单位0.1 ms);(2)选第14号和第12号数据帧的时间标识进行求差运算:0x021f9fc8-0x021f4f4c=0x507c(20604单位0.1 ms);(3)选其他时段的时间差值进行综合平均值计算,得到平均轮询时间约为2 000 ms。基于时间标识的误差,考虑是由于PLC内部的时间定时器误差和网络延时引起的,监测结果达到预期目标。CAN2总线监测数据如图4所示。

图4 CAN2总线数据监测报文
3.2 双CAN总线通信距离的实验分析
实验中CAN总线的通信电缆选用1.5mm2的铜质双绞线,CAN总线电缆的最大直流电阻为13 mΩ/m,两线间的线间电容为0.06 μF/km,感应电感为0.8 mH/km。在不考虑线间电容和线路感应电感的情况下,CAN总线可等效为图5所示的电路。
Research of Dual-CAN bus in mine IOT communication power monitoring system
The STM32 was used as the main controlling chip of the system, long-distance communication was achieved through the dual-CAN communication interface of STM32.Then subsystem was designed to achieve the logic control and the transmission of data Ethernet communication at the same time.The CAN bus measuring core data was transmitted to the remote controlling room for integrated monitoring using the Ethernet communication.Through simulation and a practical case testing,remote controlling,and information and communication function were achieved using the 10 km for mines networking dual-can communication system,and the goal of energy saving was attained.
STM32;IOT;Dual-CAN bus;communication system
TM248
A
1002-087X(2016)12-2461-02

2016-05-13
河北省高等学校科学研究计划指令项目(QN2015-110);张家口市科学技术研究与发展计划指导项目(1421008BX)
刘继文(1984—),男,湖南省人,讲师,硕士,主要研究方向为控制工程、智能算法。