CAN总线通信在全电子计算机联锁系统中的应用
2017-01-09王锁平梁慧娟
陈 真 王锁平 梁慧娟
(上海亨钧科技股份有限公司,上海 200949)
CAN总线通信在全电子计算机联锁系统中的应用
陈 真 王锁平 梁慧娟
(上海亨钧科技股份有限公司,上海 200949)
CAN总线通信在铁路信号相关系统中被普遍采用,但受通信节点数量和通信速率限制,其应用受到一定限制。在全电子计算机联锁系统设计中,采用二级CAN总线架构模式和排队机制,实现CAN总线在多节点、实时性应用条件下的稳定通信,并在冗余线路的基础上,实现高可靠性的数据通信。
CAN总线;多通信节点;全电子计算机联锁系统
1 概述
CAN总线是一种广泛应用于高可靠性场合的串行现场总线,具备高实时性、强抗干扰能力和保证数据可达等特点。在铁路领域中,广泛应用在车站计算机联锁、微机监测、机车车辆等系统中。随着信号系统产品在智能化方向的快速发展,系统中的通信节点数量大幅增加,尤其在全电子计算机联锁应用环境下,通信节点数量已远超过CAN总线110个节点的上限。因此,合理的通信结构设计、多节点下的通信实时性保证,是CAN总线在全电子联锁系统应用中重点考虑的问题。
2 全电子计算机联锁系统结构说明
图1是全电子计算机联锁系统的结构图,其中联锁逻辑运算部分采用冗余二取二结构安全平台,安全平台之间通过冗余光纤通道同步;执行部分采用全电子执行单元,执行单元的种类包括道岔模块、信号模块、轨道模块、零散模块和通信网关。模块控制对象数量如下:
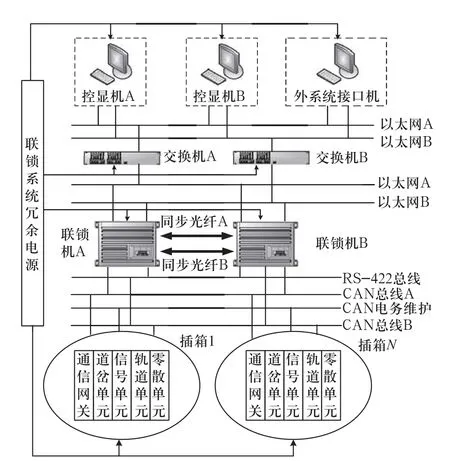
图1 全电子计算机联锁系统结构
道岔模块:一组道岔;
信号模块:一架列车/两架调车;
轨道模块:两条轨道电路;
网关模块:一个插箱放置16个模块,配置两个独立网关模块。
模块按照站场设计,灵活安装在独立插箱中,安全平台和执行单元之间的通信采用冗余CAN总线通信。另外,电子模块通过专属电务维护CAN总线,将模拟量和诊断信息发送至电务维修机监测机。
3 通信设计及实现
在全电子计算机联锁应用环境下,需要重点考虑CAN总线的多节点通信问题,以及由其引起的通信实时性、数据传输可靠性等关联问题。下面针对这些问题重点描述。
3.1 多通信节点问题处理
CAN总线的通信节点数量在理论上不受限制,但实际应用为不超过110个节点。对于多节点的应用需求,通常的做法是在满足应用要求的情况下,划分为多层网络。在全电子计算机联锁系统设计中,充分考虑联锁系统的实时性要求,并依据系统设计容量,将联锁安全平台和全电子执行单元之间的CAN通信网络划分为二级网络。第一级从联锁安全平台到通信网关,第二级从通信网关到电子模块。
将全电子计算机联锁系统的设计容量设定为150组道岔规模的站场,道岔、信号、轨道数量按照1∶2∶2的比例估算,最多可接入500个电子模块,约为32个插箱。
通信结构如图2所示。
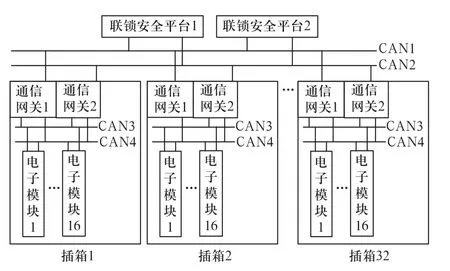
图2 安全平台和执行单元之间的通信结构
网络分为32×16的两层网络,以满足设计容量需求。第一层为联锁安全平台和通信网关之间的通信,采用冗余配置,如图2中CAN1、CAN2所示,联锁安全平台接入两条总线,通信网关只接入单条总线;第二层为插箱内部通信网关和电子模块之间的通信,冗余配置,插箱之间彼此隔离,如图2中CAN3、CAN4所示,电子模块和网关模块均接入两条总线。图中各总线之间彼此隔离。
通信过程中,网关模块缓冲16个全电子执行单元的实时数据,当通信网关收到来自联锁安全平台的数据轮询帧后,将16个模块的数据一次性发送给联锁安全平台。反之,通信网关将联锁安全平台的控制命令转发给电子模块。
3.2 通信实时性、可靠性问题
3.2.1 实时性设计
CAN总线自身具备仲裁机制和冲突检测机制,常规而言,不需要进行额外的通信冲突消解措施,就能确保通信数据的可达性。但在多节点情况下,容易引起数据传输延迟和数据丢失情况的出现。原因是受限于总线通信吞吐总量的制约和通信线路长度的影响,导致通信节点由于优先级别低而无法及时抢占总线的情况发生,以至于引发通信数据延迟。更甚者,当新联锁周期到来时,会把上个周期因为延迟没有发送成功的数据丢弃,从而导致数据丢失。因此,在周期性实时系统设计中,需要通过优化通信以杜绝此类情况的出现。
在实时以太网中,为了确保数据传输的可达性,在以太网冲突检测机制的基础上,对通信节点进行排序,并在通信过程中,以该排队顺序依次收发数据,从而彻底解决数据冲突和传输延迟问题,实现了实时通信。全电子计算机联锁系统中的CAN总线通信采用了类似的做法:以CAN节点ID划分通信网关优先级,组成顺序的收发数据队列。当通信网关收到联锁安全平台广播发送的数据轮询帧之后,各个网关首先进行时间同步,之后按照顺序,以5 ms为间隔顺序排队发送数据。如此一来,CAN总线中的每个通信节点,都获得了均等的通信机会,同时实现通信延迟时间的确定性,达到数据传输限时可达的效果。计算机联锁系统周期为200~400 ms,经过排队优化后的通信机制,完全符合联锁系统的实时性要求。
3.2.2 可靠性设计
此外,在全电子计算机联锁系统中,通过以下措施提高通信可靠性:
1)降额设计。全电子计算机联锁系统的通信应用条件符合CAN总线1 M的速度环境要求,出于可靠性考虑,采用降额设计,将通信速率设置为500 kbit/s。同时,经过排队机制处理后,在某一确定时刻,确保只有一个节点独占总线,净化总线环境,降低了位级别错误发生的概率。
2)隔离冗余网络设计。联锁安全平台和全电子执行单元之间为隔离的双网络设计,其中通信网关实现了双网络的物理隔离,有效避免了电子模块插箱的通信共因故障。插箱中的每一个模块通过冗余CAN总线同时收发数据,实现了线路冗余和数据冗余。
3)数据冗余和时间冗余设计。受CAN总线通信带宽和联锁周期高实时性限制,当发生节点通信失败后,很难实现单一周期内的数据重传机制。因此,采用数据冗余设计,当一条线路的数据错误时,采用第二条冗余线路的数据。如果两条线路的数据均错误,则在联锁处理中采用时间冗余的处理方式,丢弃本周期数据,等待接收下一周期数据。
4)优化布局布线。严格遵循CAN总线布线规范,做到最优的阻抗匹配,分支线路最短,实现强弱电分线槽隔离等。
另外,通信协议按照EN50159设计,实现了安全通信。
4 总结
CAN总线通信非常适合高可靠性的应用场景,特别是其数据传输的可达性,以及故障后自动脱离总线的特性,尤其适合计算机联锁、列控等安全相关的应用场景。通过分层的网络设计、排队机制和增强的可靠性措施,可以有效突破CAN总线通信节点的数量限制,实现实时、可靠的数据传输,确保在全电子计算机联锁系统应用条件下通信的高可靠性。采用该通信机制的全电子计算机联锁系统已在现场成功应用,从实践效果看,CAN总线在十几组道岔规模的小站,以及一百多道岔规模的大站,运行稳定,效果良好,达到了预期的设计效果。
[1]中华人民共和国铁道部.TB/T 3027-2002计算机联锁技术条件[S].北京:中国铁道出版社,2002.
[2]欧洲电工标准协会.EN 50129 铁路应用—通信、信号和处理系统—与安全相关的电子信号系统[S].2003.
[3]欧洲电工标准协会.EN 50159 铁路应用—通信、信号和处理系统—封闭通信系统中的安全通信[S].2010.
CAN bus is widely used in railway signal-related systems, but its applications are restricted by the limitation of the maximum number of communication nodes and communication rate. In the design of the full electronic computer interlocking system, the stability of CAN bus communication in multinode and real-time application condition is realized by two-level CAN bus architecture model and queuing mechanism, and the high reliability of data communication based on the redundant lines is also realized.
CAN bus; multiple communication nodes; full electronic computer interlocking system
10.3969/j.issn.1673-4440.2016.06.006
2016-10-24)