应用特征谐波消除改进脉振高频电压注入法
2017-01-07于帅章玮
于帅, 章玮
(浙江大学 电气工程学院,浙江 杭州 310027)
应用特征谐波消除改进脉振高频电压注入法
于帅, 章玮
(浙江大学 电气工程学院,浙江 杭州 310027)
针对永磁同步电机无位置传感器矢量控制中传统脉振高频电压注入法存在的估算角度滞后、与中高速无位置传感器控制技术切换困难等问题提出改进方法。引入特征谐波消除的方式取代低通滤波器,同时充分考虑定子电阻对位置估算的影响,修改误差矫正项以减小估算误差,并给出了改进后的脉振高频电压注入法的完整实现方式。应用特征谐波消除的方式得到误差校正项,估算的转子位置更加精确,用特征谐波消除的方式去除高频电流信号,不会引起电流畸变和相位滞后。用改进算法得到的转子位置及转速作为反馈对电机进行闭环控制,可以改善电机低速下的动态特性。仿真分析和实验结果证明了该方法的有效性。
永磁同步电机;无位置传感器;脉振高频电压注入;重构;特征谐波消除
0 引 言
在永磁同步电机的矢量控制中,转子的位置和转速信息较为重要,无位置传感器控制是用估算转子位置和转速的方式取代机械的转子位置传感器,得到了越来越广泛的应用。当电机运行于零速或低速时,依赖反电动势的无位置传感器控制技术难以实现[1],而高频电压注入法可以根据转子的凸极性估算转子的位置[2],较多的应用于电机零速或低速区无位置传感器控制。高频电压注入法主要分为旋转高频电压注入法和脉振高频电压注入法。旋转高频电压注入法主要用于凸极率较大的内嵌式永磁同步电机,脉振高频电压注入法不仅可以应用于内嵌式永磁同步电机,通过利用电机的饱和凸极效应,还可以应用于表贴式永磁同步电机[3]。由于高频信号注入的方式不同,和旋转高频电压注入法相比,脉振高频电压注入法产生的转矩脉动较小。
传统的脉振高频电压注入法使用低通滤波器对高频响应电流进行解算和去除[4],这种方式会带来电流相移等问题,在实际应用中很难达到较好的控制效果,加大了脉振高频电压注入法的实现难度。而且中、高速区转子位置的估算需要用到不含高频响应电流的α-β相电流,传统方法由于相移等问题,在从低速向中、高速无位置传感器控制切换时会遇到冲击。因此本文在对传统脉振高频电压注入法进行分析的基础上,提出了特征谐波消除[5]的方法取代低通滤波器,通过增加谐波补偿前馈环节的方式去除高频电流,同时考虑定子电阻对转子位置估算的影响,修改矫正误差项,最后通过仿真和实验验证了提出方法的有效性。
1 高频响应电流信号处理
在转子参考坐标系即d-q坐标系下,永磁同步电机的电压方程如式(1)所示[7]。
(1)
式中:ud、uq分别为d、q轴电压分量;Rs为定子电阻;id、iq分别为d、q轴电流分量;ωe为转子电角速度;ψd、ψq分别为d、q轴磁链;其中磁链如式(2)所示:
(2)
式中:Ld、Lq分别为d、q轴定子电感;ψf为永磁体磁链。在推导高频响应电流时,由于高频信号的角速度ωh远大于转子的电角速度ωe,因而永磁体磁链ψf随时间的变化及旋转电动势ωeψd、ωeψq可以忽略不计。
(3)
传统的脉振高频电压注入法控制框图如图1所示[8]。一般忽略定子电阻Rs,将q轴电流经过低通滤波等处理,估算出转子位置和转速。

图1 传统的脉振高频电压注入法控制框图Fig.1 Block diagram of traditional pulsating high-frequency voltage injection method
正如前面提到,在国际单位制下,如果Rs比Ld、Lq大两到三个数量级,在忽略定子电阻的前提下求取高频响应电流会引起较大偏差。因此计及定子电阻的影响,d-q坐标系下电机的高频电压方程如式(4)所示:
(4)

(5)
2.2.2 不同柱温对fs/i的影响 考察了不同柱温(25、28、30、32、35 ℃)对各fs/i的影响,结果(表3)朝藿定B、朝藿定A、朝藿定C、淫羊藿苷、木犀草素、槲皮素、川陈皮素、山柰酚、宝藿苷Ifs/i的RSD依次为0.57%、1.18%、0.98%、1.08%、2.08%、1.90%、0.76%、2.45%和2.81%,表明柱温的波动对各成分fs/i无显著影响。

(6)


(7)


图2 i幅值提取Fig.2 Extraction ofiamplitude

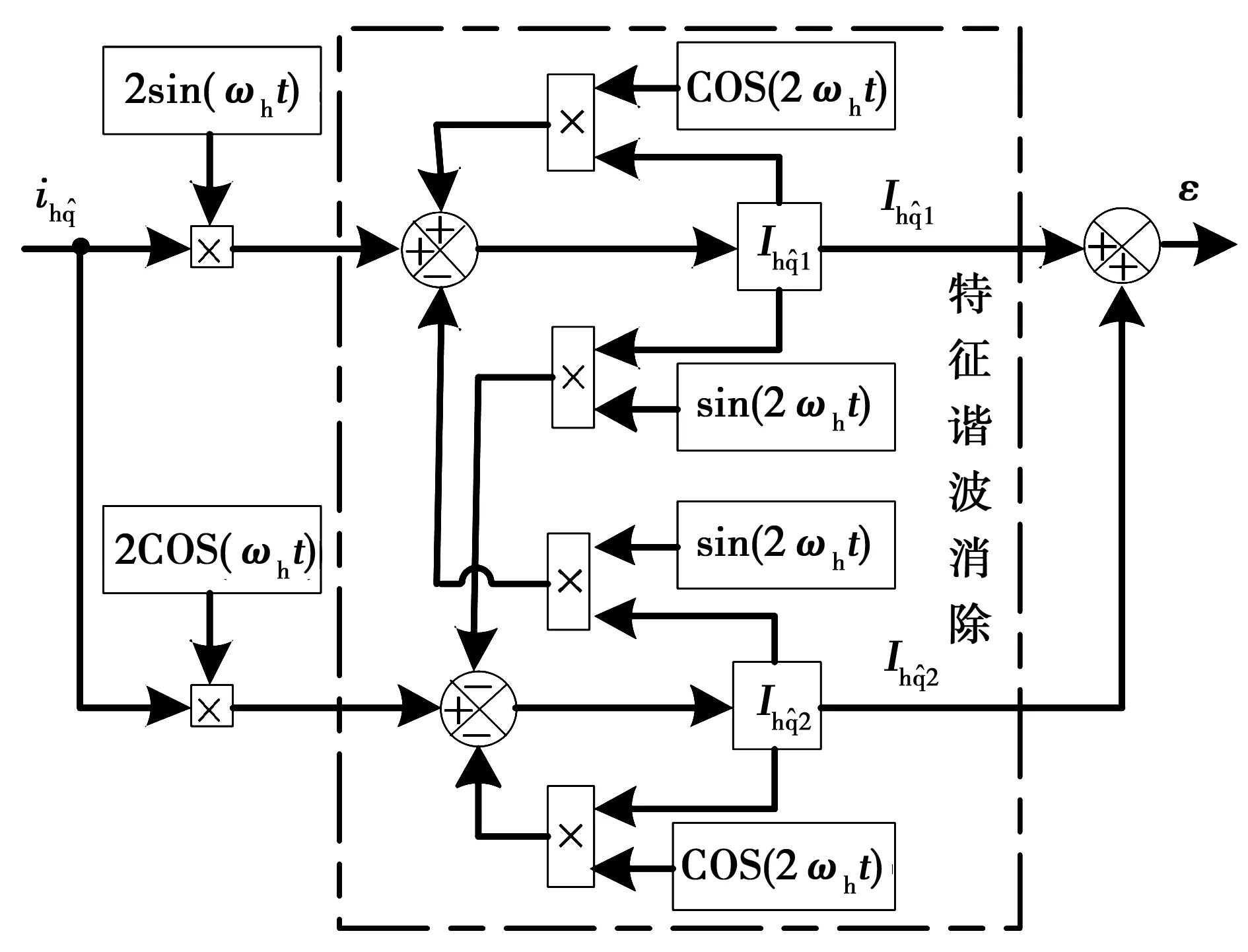
图3 i幅值提取及误差矫正项构成Fig.3 Extraction ofiamplitude and construction of the error correction term
2 脉振高频电压注入法的实现
应用特征谐波消除的脉振高频电压注入法的控制框图如图5所示。
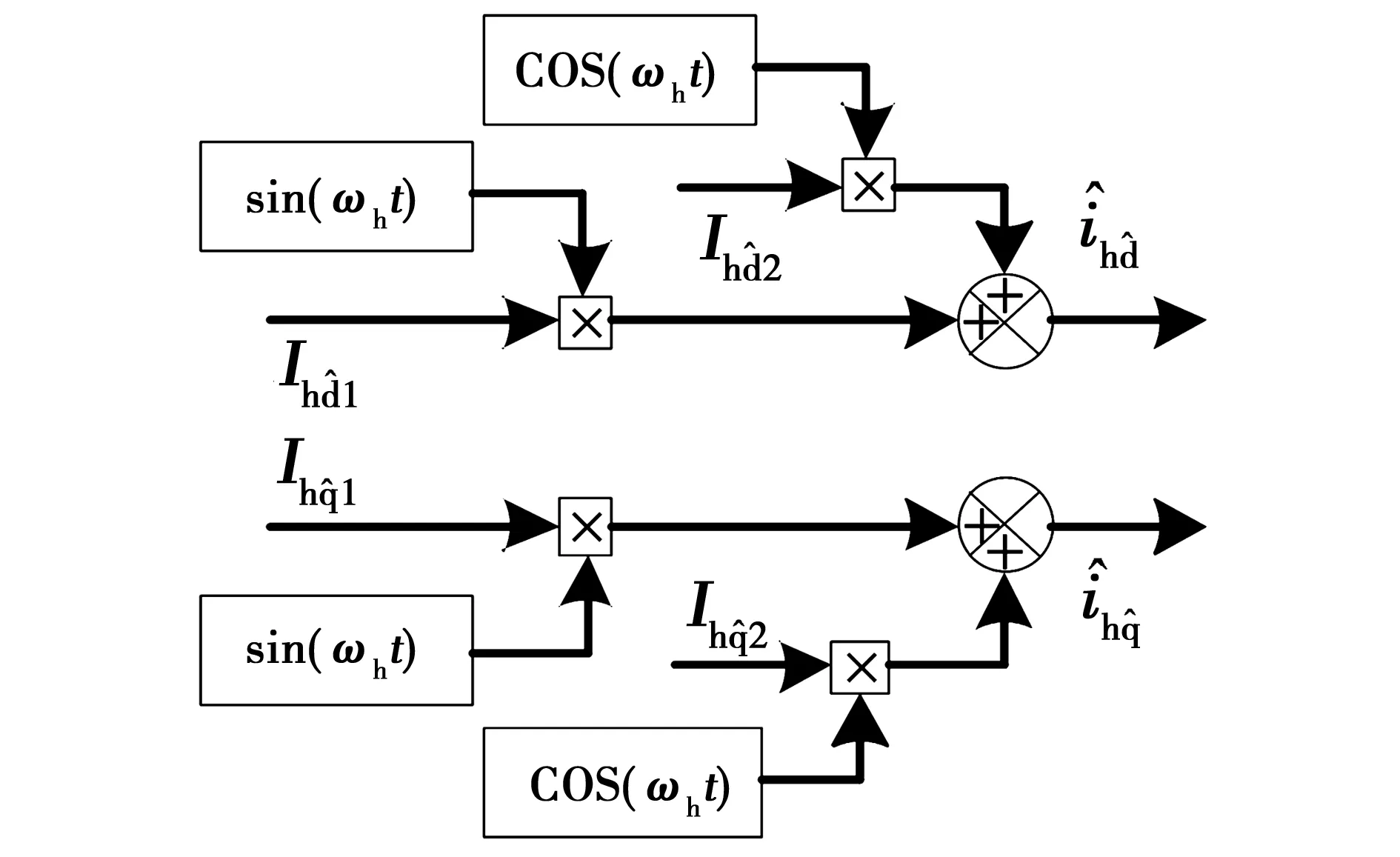
图4 高频响应电流i、i的重构Fig.4 Construction of high-frequency currentiandi
图5中的位置跟踪观测器可以根据图6所示的方式进行构造,误差校正项ε的表达式已在公式(6)中给出。

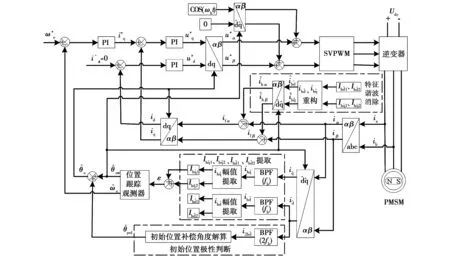
图5 应用特征谐波消除的脉振高频电压注入法控制框图Fig.5 Block diagram of improved pulsating high-frequency voltage injection with characteristic harmonic elimination

图6 位置跟踪观测器模型Fig.6 Model of position tracking observer


图7 初始位置补偿角度解算Fig.7 Calculation of the compensation angleof initial position
3 仿真和实验分析
为了验证以上控制策略,在Matlab/SIMULINK平台上对一台外转子永磁同步电机搭建了仿真模型进行仿真并进行了对应的实验验证。电机转子永磁体为表贴式,在电磁性能上属于隐极转子结构。电机参数如表1所述。
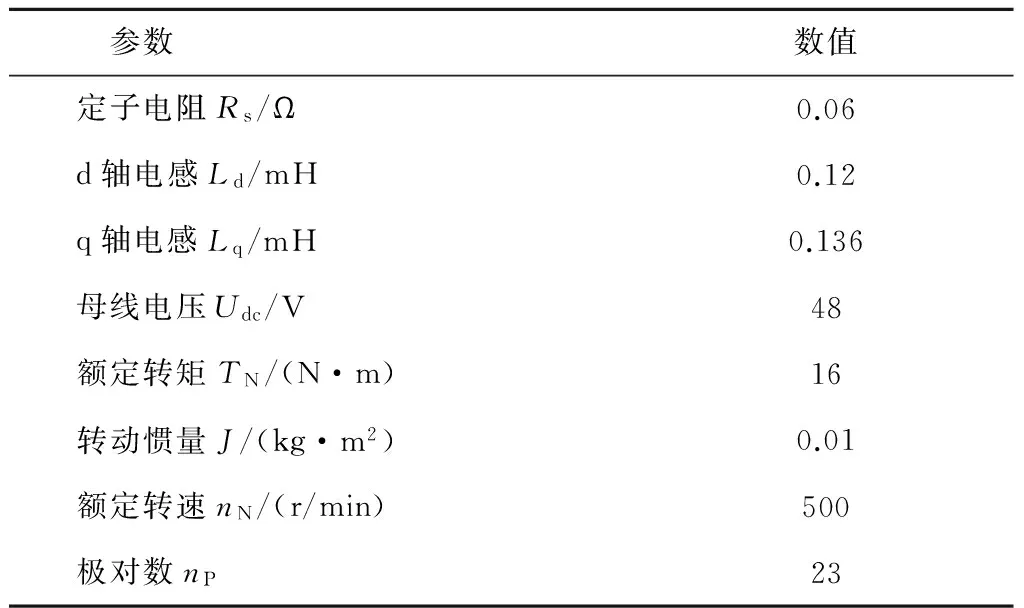
表1 电机参数Table 1 Parameters of motor

从图8与图9的对比可以看出,应用特征谐波消除法去除高频响应电流效果较好,ifα、ifβ中高次谐波含量较少,电流畸变较传统方法小。同样条件下,仿真中应用传统方法的位置估算误差为20°左右,应用特征谐波消除的脉振高频电压注入法的位置估算误差不到10°。
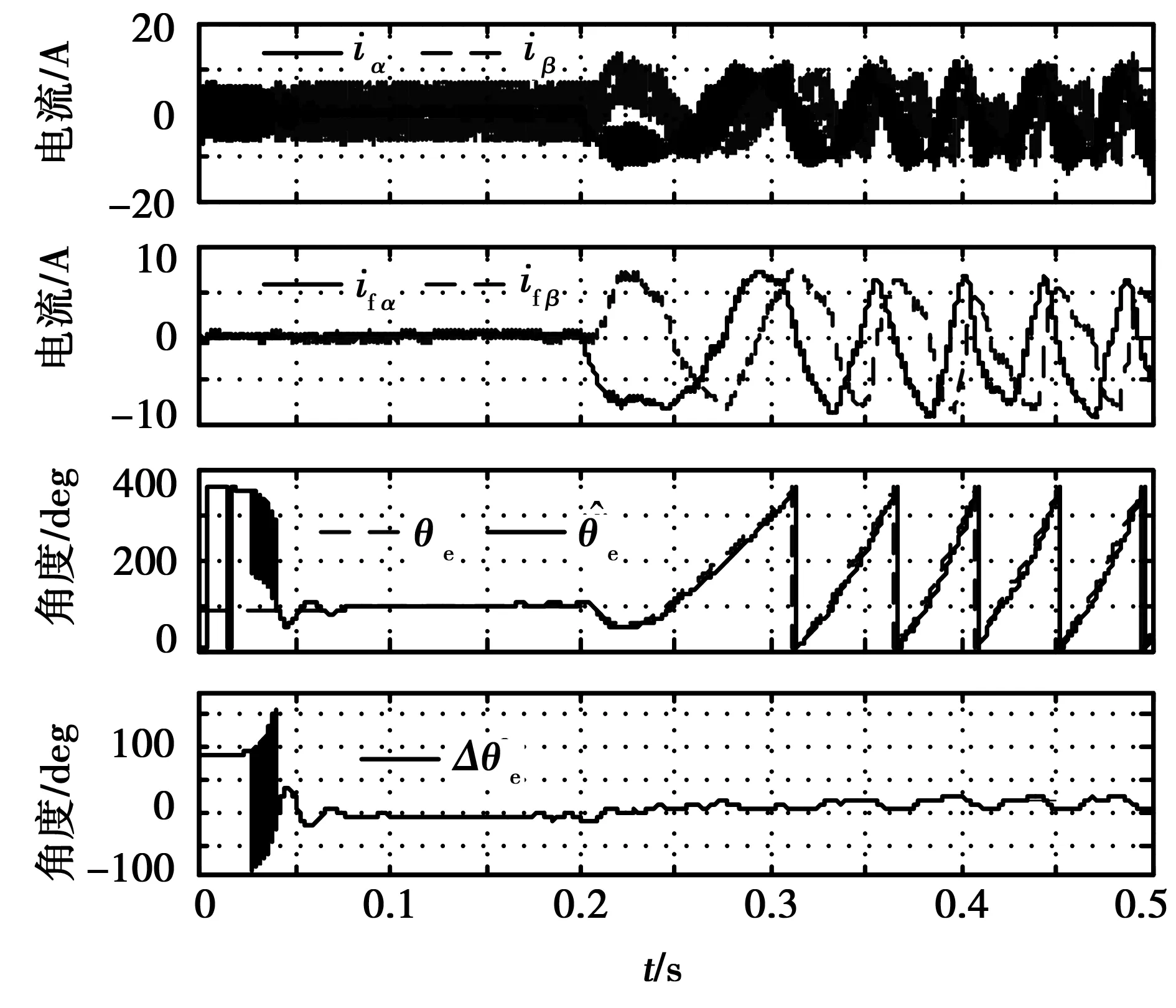
图8 应用传统脉振高频电压注入法的仿真结果Fig.8 Simulation results of the traditional pulsating high-frequency voltage injection method

图9 引入特征谐波消除法的仿真结果Fig.9 Simulation results of the method with the characteristic harmonic elimination
在实验中对上述隐极式永磁同步电机应用改进的脉振高频电压注入法进行无位置传感器控制,测量电机低速时的运行特性,对该控制方法进行实验验证。实验平台还包括直流电源、测功机、30 kW的驱动器等,驱动器的控制芯片为TMS320F28234。实验数据通过通讯模块传输到电脑中,实验系统框图如图10所示。将脉振高频电压注入法应用到该电机的启动上,速度达到一定值后可切换到其他适用于中、高速的无位置传感器控制策略。
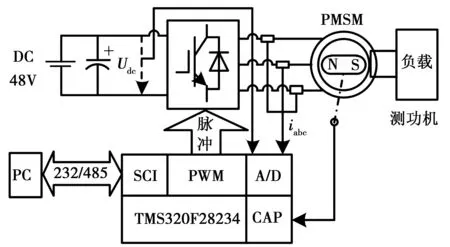
图10 实验系统框图Fig.10 Block diagram of experimental system

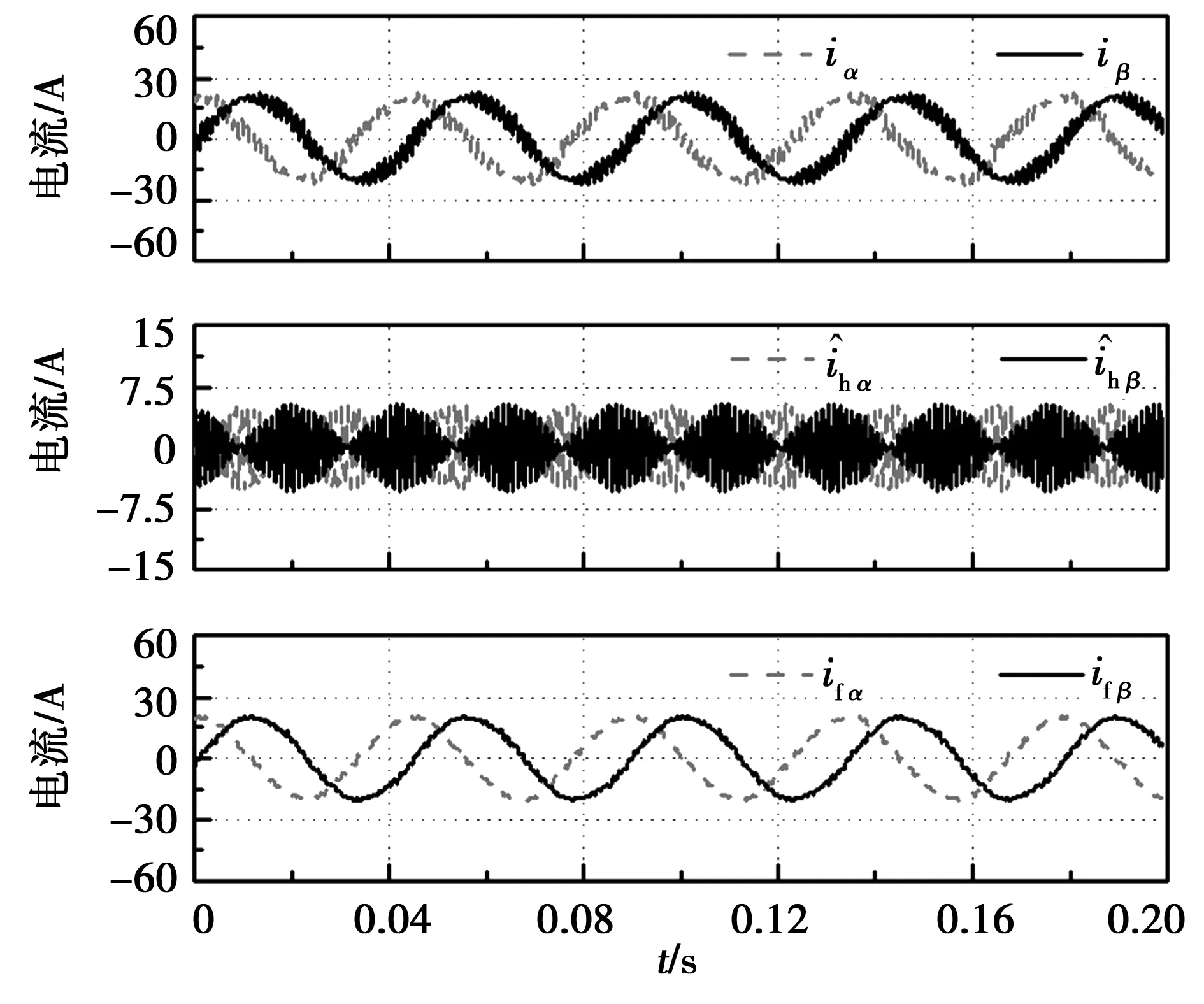
图11 高频响应电流的去除Fig.11 Elimination of the high-frequency current
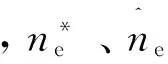
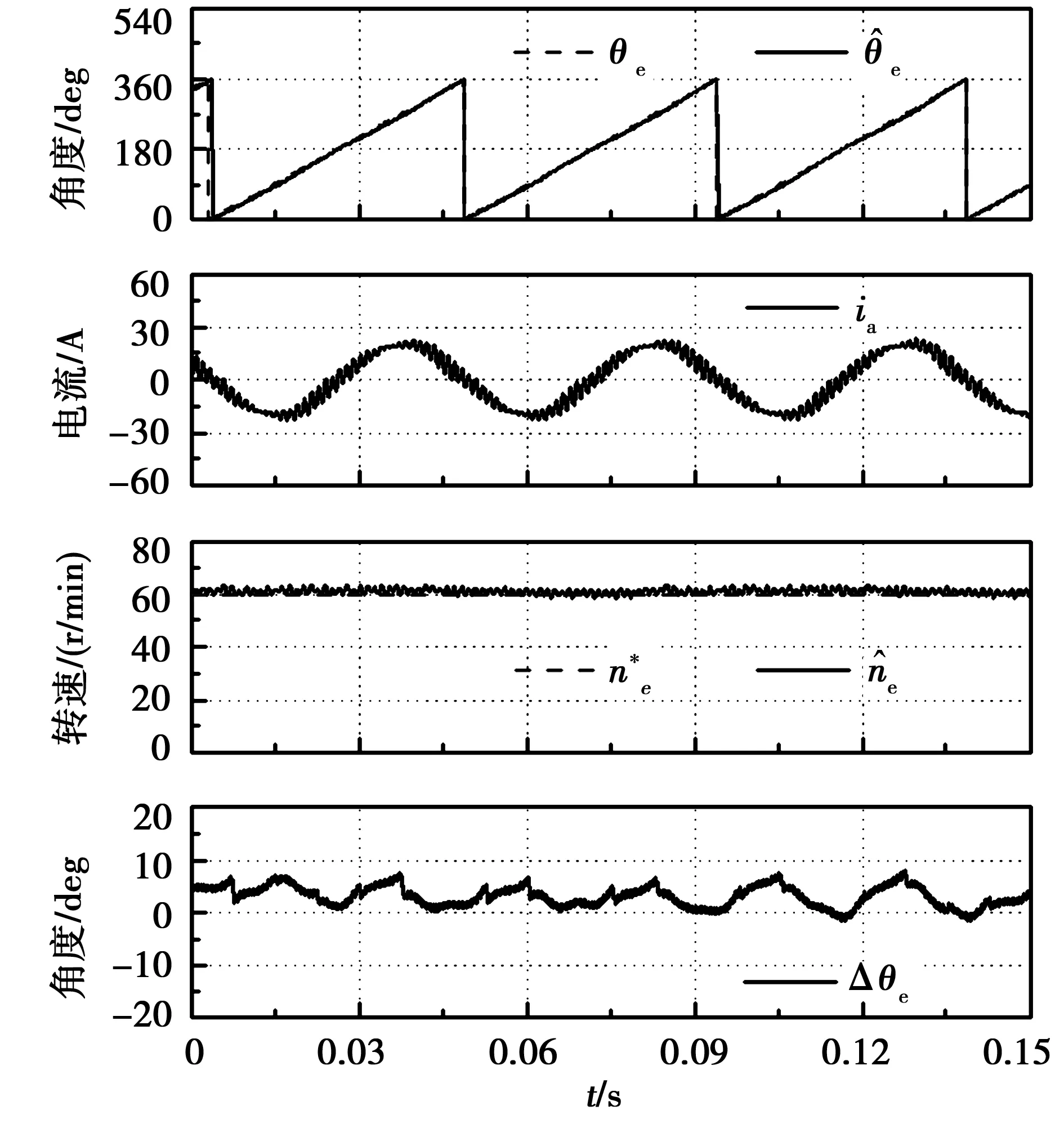
图12 转子位置和转速估算结果Fig.12 Estimation results of the rotor position and speed
为了测试无位置传感器控制系统的动态特性,当电机转速为90 r/min时,负载转矩由零突变到额定转矩以及由额定转矩突变到零,这两种情况下的电机动态特性如图13、图14所示。由图中可以看出,电机转速在1.5 s内被调节到参考转速,位置估算误差在15°以下,系统可以通过调节达到稳定。

在仿真和实验中对改进的脉振高频电压注入法的控制效果进行了验证,仿真结果包括电机的启动过程,实验结果包括电机的稳态运行和动态响应。仿真和实验结果均表明,应用特征谐波消除的方式取代低通滤波器,高频响应电流去除效果较好,不引起相电流相位的滞后,转子位置估算较精确,稳态时位置估算误差在10°以下,动态时位置估算误差在15°以下。
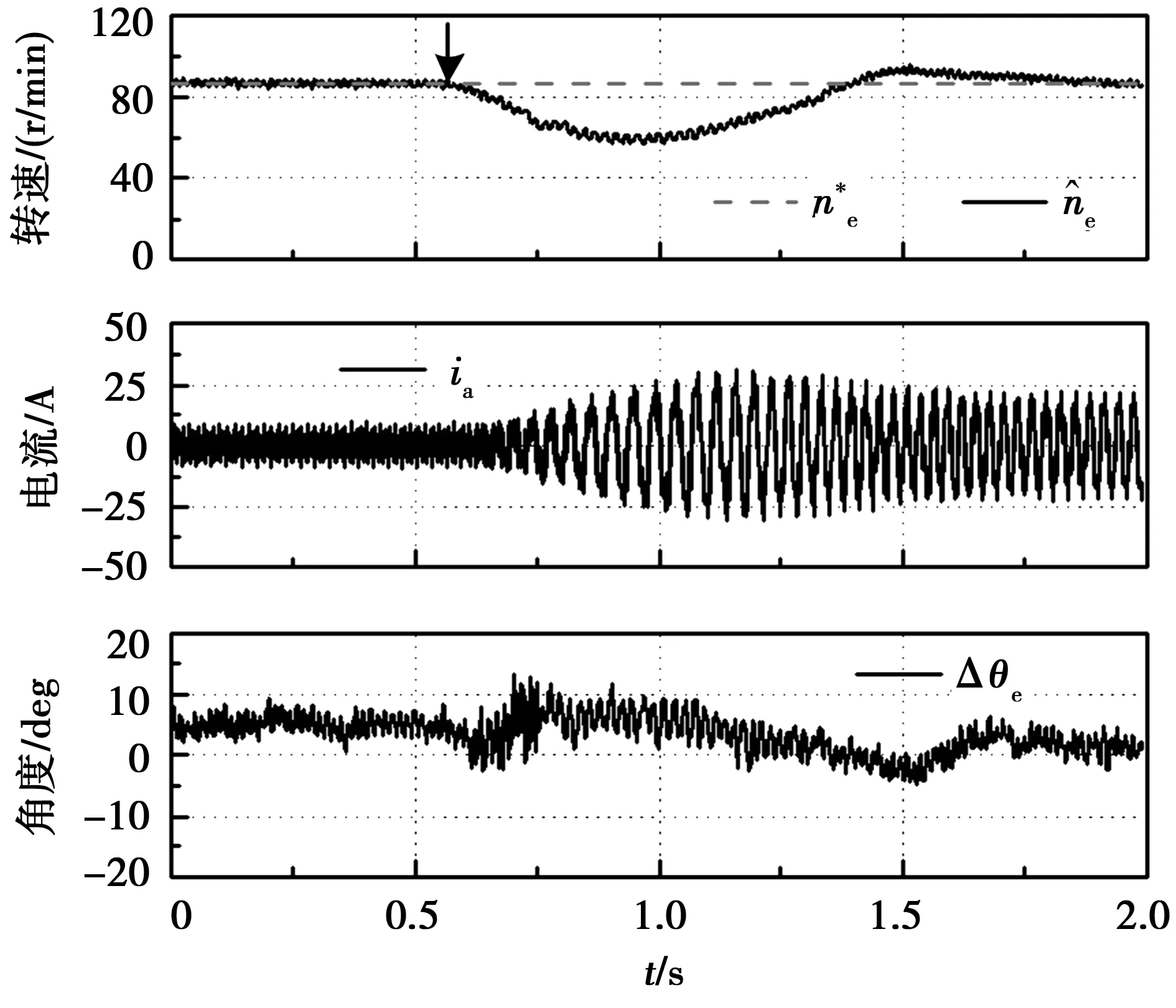
图13 突加16 N·m转矩时电机的动态特性Fig.13 Stepping up of 16 N·m load torque
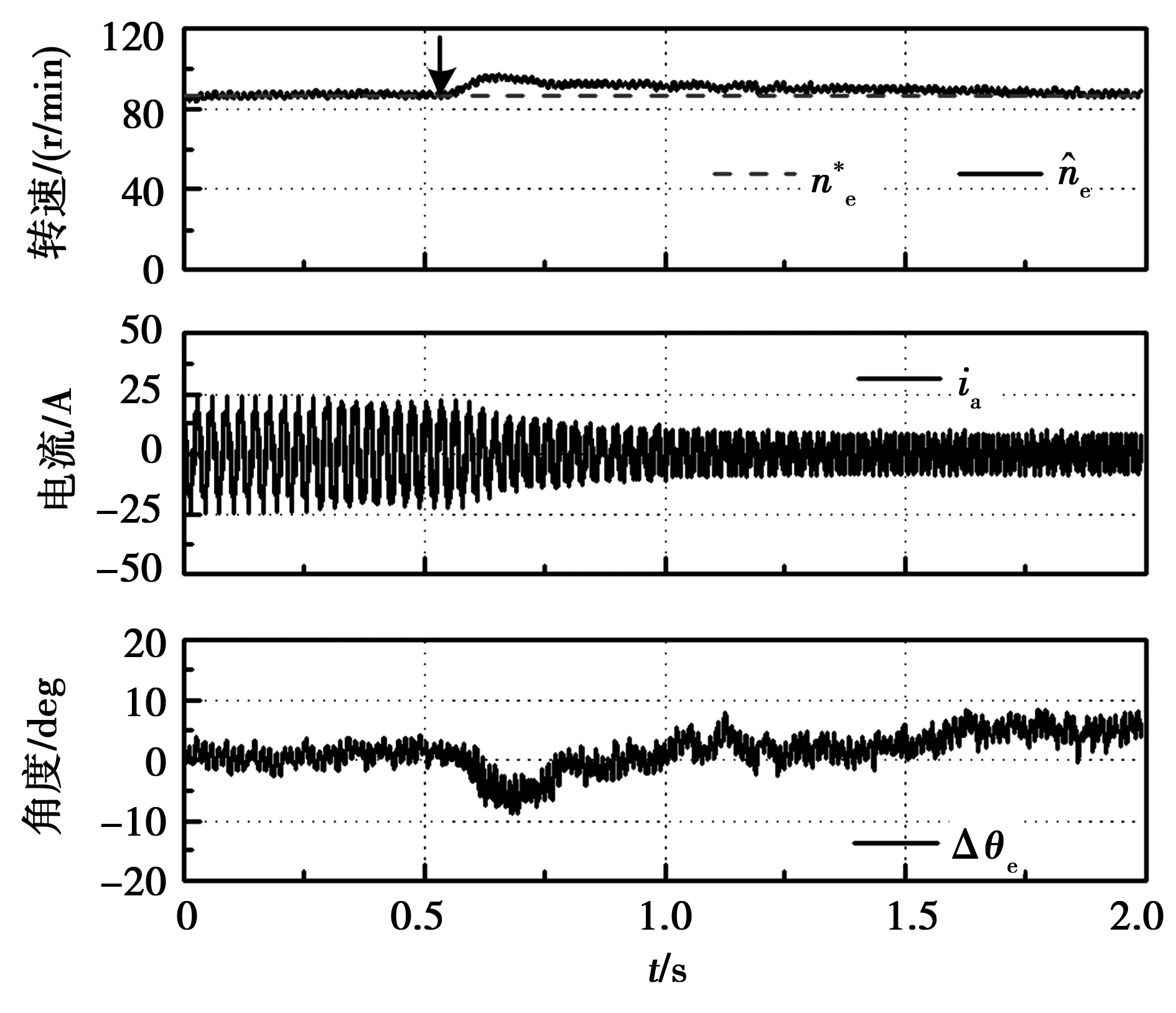
图14 突减16 N·m转矩时电机的动态特性Fig.14 Stepping down of 16 N·m load torque
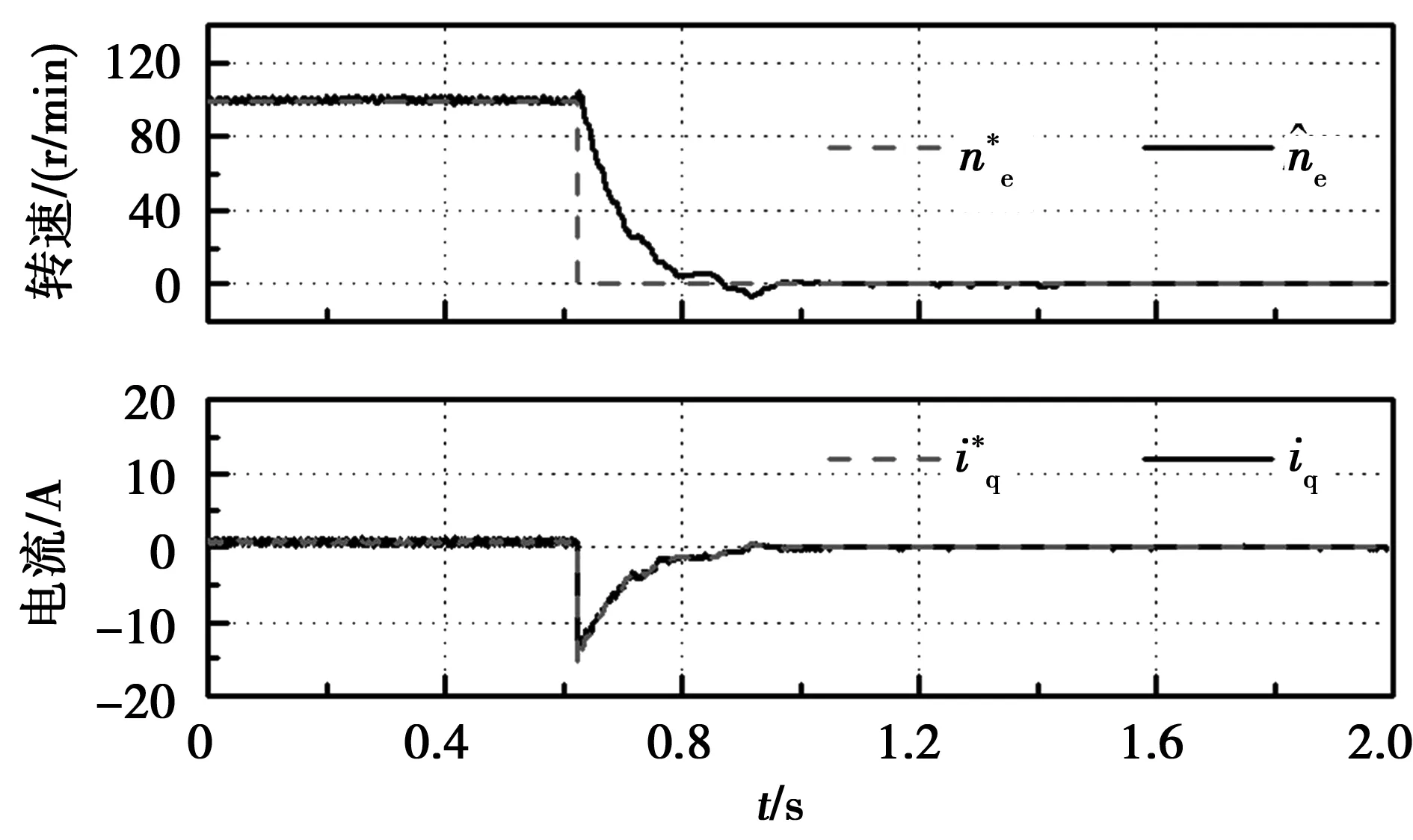
图16 参考转速突降时电机的响应Fig.16 Stepping down of the reference speed
4 结 论
脉振高频电压注入法适用于永磁同步电机零速或低速区无位置传感器控制。对传统的脉振高频电压注入法进行改进,将特征谐波消除的方法应用到脉振高频电压注入法中,取代低通滤波器,可避免产生电流波形畸变和相移,能更有利于平滑地切换到中、高速的无位置传感器控制。仿真和实验结果表明,改进的脉振高频电压注入法估算的转子位置更加精确,同时能满足低速运行时动态性能的要求。
[1] 李永东,朱昊.永磁同步电机无速度传感器控制综述[J].电气传动,2009,39(9):3-10. LI Yongdong,ZHU Hao.Overview of sensorless control of permanent magnet synchronous motors[J].Electric Drive,2009,39(9):3-10.
[2] CORLEY M J,LORENZ R D.Rotor position andvelocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Transactions on Industry Applications,1998,34(4): 784-789.
[3] 秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121. QIN Feng,HE Yikang,LIU Yi,et al.Comparative investigation of sensorless control with two high-frequency signal injection schemes[J].Proceedings of the CSEE,2005,25(5):116-121.
[4] 贾洪平,贺益康.基于高频注入法的永磁同步电动机转子初始位置检测研究[J].中国电机工程学报,2007,27(15):15-20. JIA Hongping,HE Yikang.Study on inspection of the initial rotor position of a PMSM based on high-frequency signal injection[J].Proceedings of the CSEE,2007,27(15):15-20.
[5] 刘景晖.基于特征谐波消除的STATCOM电流优化方法研究[D].上海: 上海交通大学,2013.
[6] 王志新,林环城,陆斌锋,等.脉振高频电压注入PMSM凸极特性实验检测研究[J].电机与控制学报,2015,19(3):20-24. WANG Zhixin,LIN Huancheng,LU Binfeng,et al.Experimental research of PMSM salient characteristic using pulsating high-frequency voltage injection[J].Electric Machines and Control,2015,19(3):20-24.
[7] 王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京: 机械工业出版社,2006: 106-110.
[8] 郑昌陆,胡月波.基于高频脉振电压注入的内置式永磁同步电机控制[J].电气传动自动化,2015,1:10-15. ZHENG Changlu,HU Yuebo.Control method of interior permanent magnet synchronous motor basedon high-frequency pulsating voltage injection[J].Electric Drive Automation,2015,1:10-15.
[9] KIM H,HARKE M C,LORENZ R D.Sensorless control of interior permanent-magnet machine drives with zero-phase lag position estimation[J].IEEE Transactions on Industry Applications,2003,39(6): 1726-1733.
[10] GONG L M,ZHU Z Q.Robust initial rotor positi-on estimation of permanent-magnet brushless AC machines with carrier-signal-injection-based sensorless control[J].IEEE Transactions on Industry Applications,2013,49(6): 2602-2609.
[11] 廖勇,沈朗,姚骏,等.改进的面贴式永磁同步电机转子初始位置检测[J].电机与控制学报,2009,13(2):203-207. LIAO Yong,SHEN Lang,YAO Jun,et al.Initial rotor position detection for surface mounted PMSM based on rotating high frequency signal injection[J].Electric Machines and Control,2009,13(2):203-207.
(编辑:刘素菊)
Improved pulsating high-frequency voltage injection with characteristic harmonic elimination
YU Shuai, ZHANG Wei
(College of Electrical Engineering,Zhejiang University,Hangzhou 310027,China)
The traditional pulsating high-frequency voltage injection (PHFVI) method has problems such as estimated rotor position lag and difficulty in switching to higher speed region.To solve these problems,the characteristic harmonic elimination (CHE) method is applied to replace the traditional low pass filter.Besides,taking the stator resistance into consideration,a modified estimation error correction term was proposed to reduce the elimination error.It resulted in more accurate estimated position,less current distortion and less phase lag.Using the estimated position and speed as feedbacks in speed regulation loop can improve low speed dynamic performance of the motor.The complete scheme of the proposed method was given.Simulation and experimental results are demonstrated in detail to verify the feasibility and advantages of the proposed scheme.
permanent magnet synchronous motor; position sensorless; pulsating high-frequency voltage injection; reconstruction; characteristic harmonic elimination
2016-01-25
浙江省自然科学基金(LY12E07002)
于 帅(1990—),女,硕士研究生,研究方向为永磁同步电机的无位置传感器控制; 章 玮(1967—),女,博士,副教授,硕士生导师,研究方向为交流电机的优化设计和控制策略。
章 玮
10.15938/j.emc.2016.12.003
TM 351
:A
:1007-449X(2016)12-0017-08