城市道路占路施工区交通标志设置理论与仿真研究
2017-01-06魏连雨刘艳竹
魏连雨,魏 凯,冯 雷,刘艳竹
(1.河北工业大学 土木工程学院,天津 300401;2.河北省土木工程技术研究中心,天津 300401)
城市道路占路施工区交通标志设置理论与仿真研究
魏连雨1,2,魏 凯1,冯 雷1,刘艳竹1
(1.河北工业大学 土木工程学院,天津 300401;2.河北省土木工程技术研究中心,天津 300401)
采用交通流理论和交通仿真技术,结合占路施工区人、车、路、环境的交通特性,对占路施工区参数以及交通标志的设置进行了研究.在分析交通标志认知模型的基础上,采用交通流理论,建立了占路施工区参数以及交通标志的设置参数的计算公式.针对理论分析结果,采用UCw in/road仿真系统进行对比,结果表明,由于理论分析前提条件的理想化,导致其计算参数小于UC w in/road系统的数值分析结果,说明UC win/road系统的数值分析更具客观性.
占路施工;交通标志;交通仿真;前置距离;限速
0 引言
交通语言系统是交通管理者与出行者(设施使用者)之间进行信息交流的工具,是以文字、符号、颜色等为基础的符号体系和规则体系的集合.交通语言的应用体现为道路交通标志、标线以及其他交通管理控制设施所包含的一系列与交通管理出行相关的信息[1].
城市道路占路施工过程中,道路使用空间减小,道路状况复杂程度增大,交通系统稳定性降低.为了最大限度降低道路施工对交通出行的影响,保障施工区交通安全,需要采取合理的占路施工区交通管理措施.其中交通标志的布置对施工区正常运行有着不可估量的作用.
本文结合交通流理论和交通仿真相关理论,构建交通标志前置距离的计算模型,对城市道路占路施工区交通标志的设置进行理论研究.然而,由于理论研究是在理想条件下进行的,其普遍适用性有待检验.因此,本文基于UC w in/road模拟系统和SOAR认知模型充分考虑施工区交通实际状况对施工区交通标志的设置进行仿真模拟,并对理论计算和仿真结果进行对比分析.
1 占路施工区交通标志概述
道路交通标志是用图形符号、颜色和文字向交通参与者传递特定信息,用于交通管理的设施[2].科学合理、完善准确的交通标志的设置对道路交通的正常运行有着不可估量的重要作用.
占路施工区是指为保障占路施工现场工作人员和设备、车辆、行人的交通安全而用交通安全设施围起来的交通控制区域[3-4].占路施工区一般由警告区、上游过渡区、作业区、下游过渡区和终止区组成[5].
占路施工区交通标志包括施工安全标志、警告标志、禁令标志、指示标志、辅助标志.结合占路施工区人、车、路、环境的交通特性,(即基于交通心理学的驾驶员驾驶行为的调整、稳定、恢复3阶段变化;基于交通流理论的车辆的重新分布、分流合流行为;以及各功能区段的道路性质)[3-4]对占路施工区的交通标志分区段进行设置.通过不同标志、标牌的设定,保证道路施工期间交通安全通畅.简单的说,应从整个道路交通系统出发,统一规范,协调设计,关联设置,而且要遵循以人为本的原则.设置情况如表1所示.
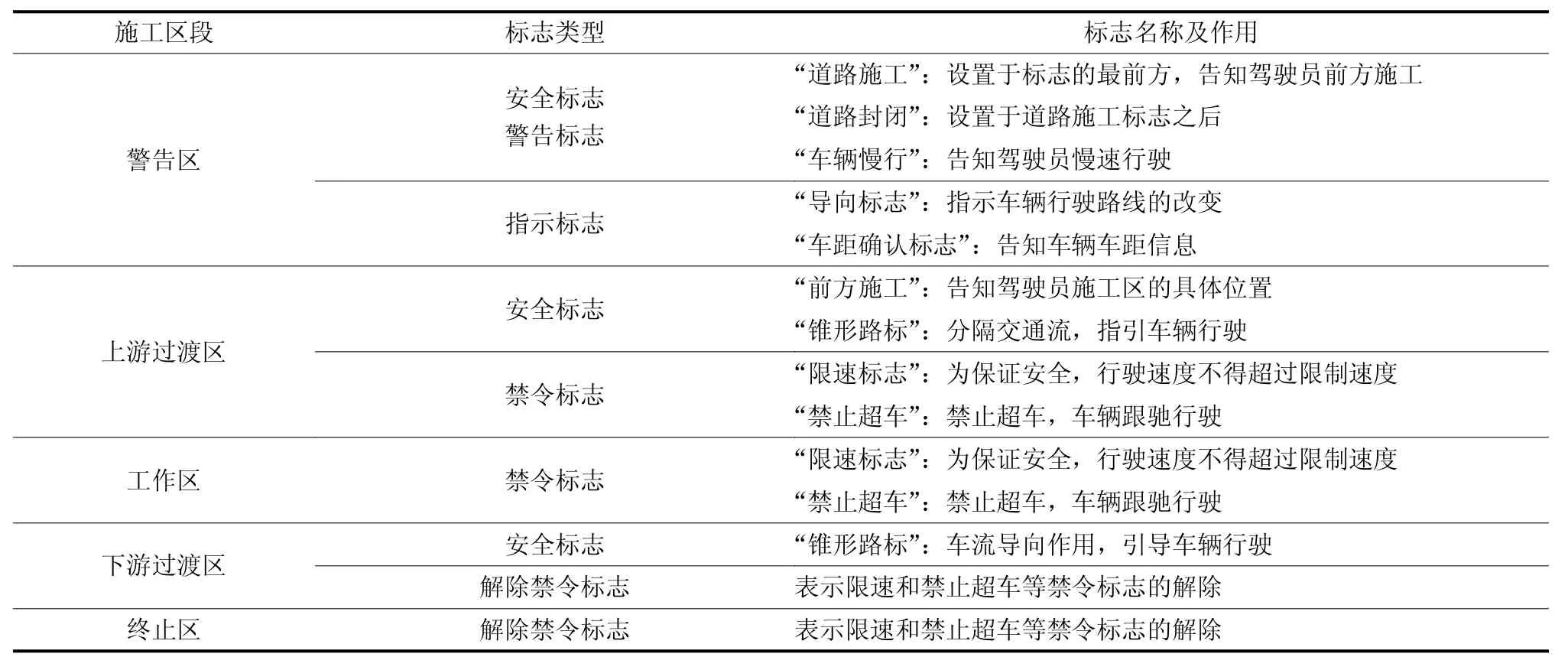
表1 占路施工区各功能段交通标志设置Tab.1 The setting of the traffic signs in the road construction area
2 占路施工区交通标志设置理论研究
在停车视距的基础上对交通标志的前置距离进行定义.为了使驾驶员在作业区之前完成所有的必要措施,交通标志应设置在作业区之前一定距离处,这个距离称为交通标志的前置距离[6].
从交通心理学和交通安全理论的角度,结合交通设施设计和交通管理与控制的相关理论,通过构建驾驶员行驶模型和标志的认知模型,对交通标志的前置距离进行研究.对交通标志的认知模型大致如图1所示.图1中,A点发现标志,B点认读开始,C点认读完成,D点消失点,E点行动点,F点标志牌,G点完成点.
分析驾驶员的驾驶行为可得:B点到C点为认读距离R',C点到E点为反应距离J,E点到G点为行动距离L.
消失点D到标志牌F为消失距离M,认读完成点C到标志牌F为距离R;认读开始点B到标志牌F为视认距离S,标志牌F到动作完成点G为前置距离D.
为保证驾驶行为的改变,分析驾驶员行驶模型和标志的认知模型中各段距离的关系可得:

其中:L1为变换车道的距离;L2为减速距离.结合交通工程和道路勘测设计相关知识对上述公式中的距离进行分析计算[6-7].
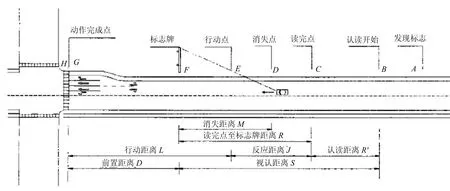
图1 交通标志认知模型示意图Fig.1 The cognitivemodelof traffic signs
1)认读完成点C到标志牌F的距离R
2)变换车道距离L1

式中:n为车道数;V1为认读标志时的速度,Km/h;t2为变换一次车道需要的时间(s),约6 s左右.
3)减速距离L2
4)反应距离J

式中:t1为判断时间(s),一般取2.5 s.
由上述各公式可得:

那么交通标志的前置距离D为:

3 占路施工区交通标志设置仿真分析
3.1 仿真原理
UC w in/Road是辅助道路工程规划设计的三维虚拟现实模拟系统,可通过简单的计算机操作进行三维模拟.UC w in/Road包含“地形输入”、“道路定义”、“道路形成和交通流生成”、“交通设置编辑”、“虚拟现实模拟”等功能.应用该软件时,首先输入编辑地形信息;其次,通过设置参数,定义道路信息;接着,设置交通路径以及信号控制,生成交通流;然后,对行驶进行设置完成三维虚拟现实模拟[8].
SOAR的全称为状态、算子和目标(State,Operator and Result),是由A llen Newell等人于1983年开发的称为“通用智能”的一种框架,主要讨论知识、思考、智力和记忆,是一个应用范围非常广的认知结构[9].SOAR认知模型认为施工区车辆为相互影响的差异化驾驶单体,SOAR通过一个固定的处理机制——决策周期,完成SOAR的选择和应用算子等功能.
在车辆驶近施工作业区时,需要进行换道,与在换道车道正在行驶的车辆存在交织.本文根据当前车辆和相邻车辆占用道路的重叠程度对交通冲突及严重程度进行判别.将道路定义为n个道路元胞的组合,每个道路元胞为1.25m×1.25m,小汽车尺寸取5m×2.5m,每个小汽车所占道路元胞为8个,在车辆交织过程中车辆所占道路元胞可能会出现重叠,根据重叠的数量定义冲突严重程度.将冲突严重程度分为3级:一般冲突,中等冲突,严重冲突,其对应重叠的数量分别为1,2,3及以上.
本文仿真实验以上游过渡区限速标志设置为例,通过构建基于认知模型的占路施工区交通仿真模型,分析一定道路交通条件下占路施工上游过渡区限速标志设置位置的合理性以及限速值的确定.
3.2 仿真条件
采用图2所示道路进行仿真,双向六车道快速路长2 km,设计车速为60 km/h,通行能力1500 pcu/h,车道宽度为3.75m.在离路口800m处进行施工作业,封闭自东向西方向靠近中央分隔带的一个车道,其他车道的行车方向不变,车辆的自由流速度为60 km/h.施工区的交通标志简单布置表示如图2所示,其中限速标志距离上游过渡区交界位置的距离为D,即交通标志的前置距离.
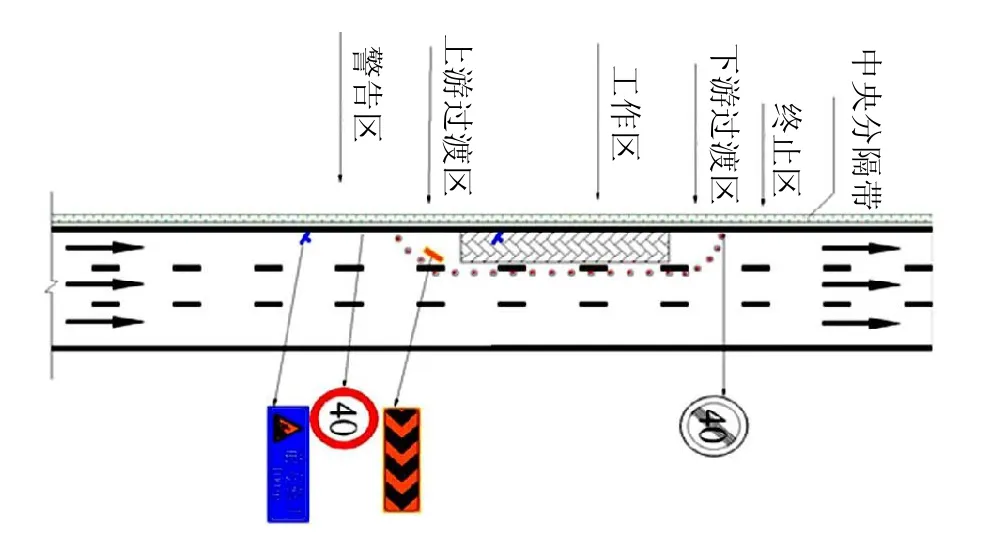
图2 占路施工区简单布置图Fig.2 The layoutof the road construction area
为了使仿真条件与施工区实际交通状况相契合,可以通过仿真参数的设置来实现.改变输入车辆类型及其比例来实现实际交通中车辆组成的随机性,实现其相互影响、彼此制约.相同车辆类型可设置不同的行驶参数,如加速度、减速度、期望车速的分布不同,来实现交通实际中驾驶员性别、年龄、驾龄差异性的模拟.此外,UCw in/road仿真系统还可以实现不同场景的模拟,可分别对晴天、雨天、雪天进行仿真模拟.
3.3 仿真实验和结果
(1)科研成果划分法。科研成果本质上属于知识创新集成建构,一般表现为知识类、技术类和产品类三大类型。对应科研成果的理论属性和应用属性与三大类型两两组合,知识类,提出新的理论体系和认识,主要包括基础理论研究和应用理论研究;技术类,开发出新的工艺制作标准,主要包括专利技术研究和实用技术研究;产品类,生产制造出新的有用产品,主要包括产品创新研究和产品创造研究。依据油田博士后科研成果类型划分及属性特征,通过对149个项目进行统计分析结果显示:知识理论研究占26%,技术应用研究为66%,产品生产型项目研究最少,仅为8%。
3.3.1 限速标志限速值的确定
改变速度限制上限,分别设置为30 km/h、35km/h、40 km/h、45 km/h、50 km/h、55 km/h、60 km/h,并将限速标志前置距离D长度分别设为100 m、150m、200m、250m、300m、350m、400m,发车频率设为1050pcu/h,即道路载荷系数为0.7,对7种不同限速值和标志前置距离进行交叉仿真实验,仿真120min内,得到不同条件下的交通冲突指标如表2~表4所示.
对上述数据进行统计分析得到趋势图如图3~图5所示.如图3~图5所示,随着限速标志前置距离的不同和限速值的改变,一般冲突、中等冲突和严重冲突的变化也不尽相同.当限速值不变而改变限速标志的前置距离时,对上述各图进行分析.
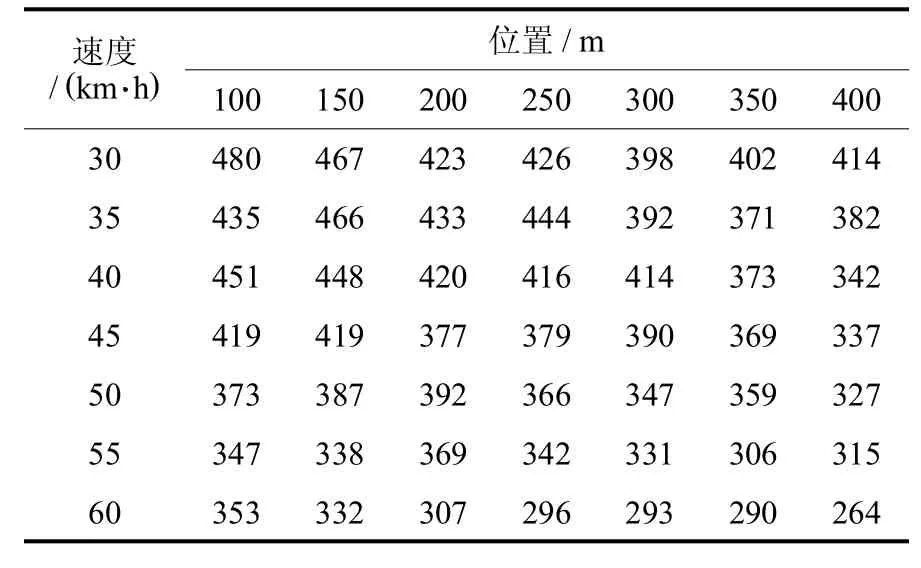
表2 不同位置和不同限速下一般冲突次数Tab.2 The numberofgeneral traffic conflicts
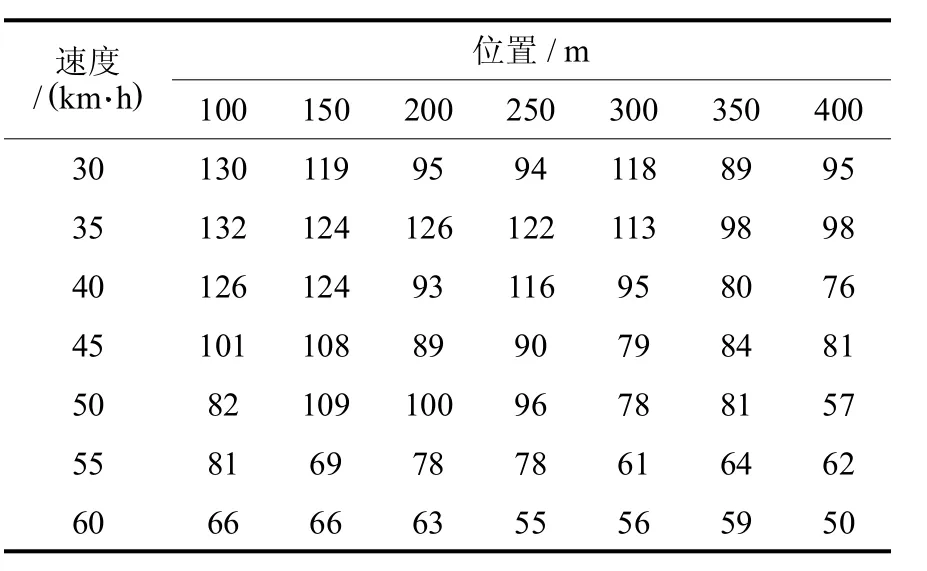
表3 不同位置和不同限速下中等冲突次数Tab.3 The numberofmedium traffic conflicts

表4 不同位置和不同限速下严重冲突次数Tab.4 The numberof serious conflicts
由图3可得:一般冲突次数随着前置距离由100m增大到400m过程中,呈现逐渐减小的趋势,表明随着限速标志前置距离的增大,轻微交通事故发生的可能性逐渐下降.
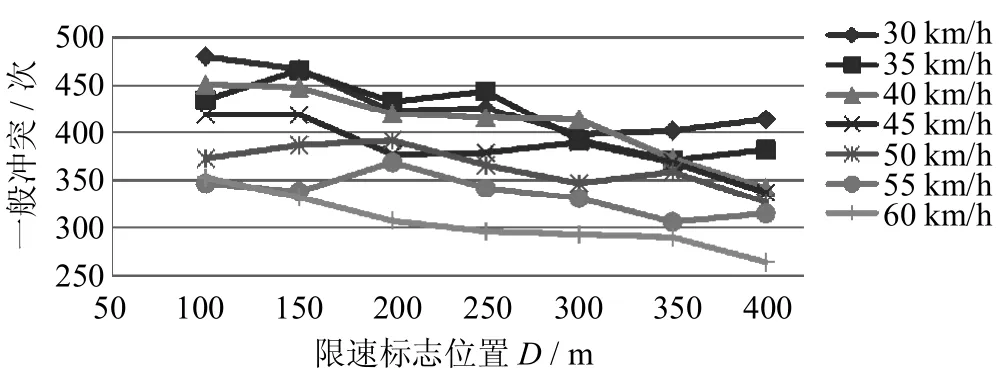
图3 限速标志位置对一般冲突的影响Fig.3 The location of sign effectson thegeneral traffic conflicts
由图4可得:中等冲突次数随着限速标志前置距离的改变,增减变化趋势并不明显,这表明中等交通事故发生的可能性随着限速标志前置距离的改变而无明显变化.
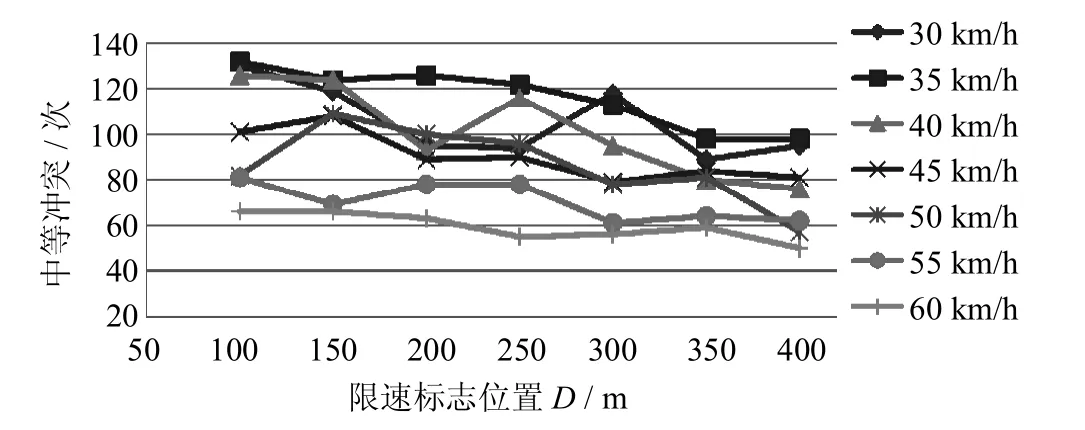
图4 限速标志位置对中等冲突的影响Fig.4 The location of sign effectson themedium traffic conflicts
由图5可得:严重冲突次数随着限速标志前置距离由100m增大到400m的过程中变化较为复杂,冲突次数对于不同的限速值呈现出不同的变化趋势;当限速值较大时(40~60 km/h),冲突次数呈现减小趋势,而当限速值较小时(30~40 km/h),冲突次数呈现先减小再上升的趋势,变化点大约在前置距离250~300m的位置.

图5 限速标志位置对严重冲突的影响Fig.5 The location of sign effectson the serious traffic conflicts
综上所述,考虑一般冲突、中等冲突、严重冲突随限速值大小以及前置距离的变化趋势,对占路施工区的限速值进行分析可将限速值宜设置为40 km/h.
3.3.2 限速标志前置距离的确定
限速值设置为40 km/h,限速标志的前置距离取不同值,研究交通流的时空图可得:图6~图9为限速值40 km/h,限速标志前置距离取不同值时的交通流时空图.D=100 m时,在施工区域前方发生大面积拥堵,且随着时间的增长,拥堵区域逐渐扩大;D=200 m时,施工区前方拥堵面积减少很快,拥堵区域扩大趋势得到控制;L=250 m时,施工区前方拥堵面积进一步减少但仍然存在;D=300 m时,施工区前方拥堵面积仍然存在,与D=250m时交通流状态差别不大.
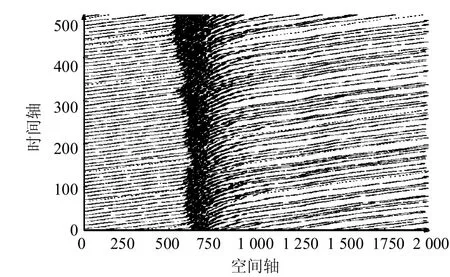
图6 D=100m时的交通流时空图Fig.6 Time-spacediagram when D=100m
综合考虑交通冲突和交通拥堵状况,推荐在仿真实验条件下,限速40 km/h的交通标志设置位置为施工过渡区前方250~300m.
4 仿真结果与理论计算对比分析
由理论研究可得,交通标志的前置距离计算公式为

根据仿真条件可得:车道数为3车道,设计速度为60 km/h,限速值为40 km/h,即n=3,V1=60 km/h,V2=40 km/h,t1=2.5 s,t2=6 s,经计算可得,前置距离D的值大约为240m.
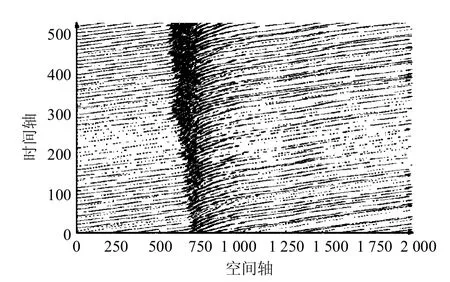
图7 D=200m时的交通流时空图Fig.7 Time-space diagram when D=200m
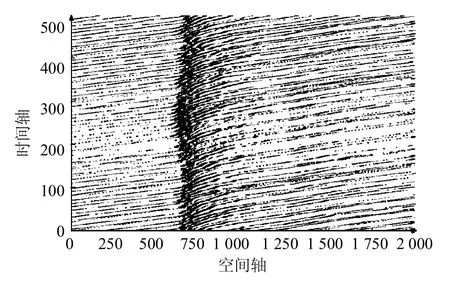
图8 D=250m时的交通流时空图Fig.8 Time-space diagram when D=250m
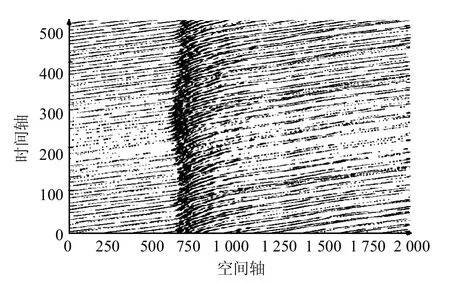
图9 D=300m时的交通流时空图Fig.9 Time-space diagram when D=300m
由仿真结果知,交通标志前置距离为250~300m.
两者对比可知,仿真结果比理论计算数值偏大.分析原因可知,理论计算公式是分析单一车辆的交通标志认知模型得出的,交通条件状况较为理想.而仿真模拟中,不但考虑了车辆运行中其他车辆的干扰因素,而且将不同年龄、性别、驾龄的驾驶员信息转变为可输入的交通参数在仿真系统中进行了设定.除此之外,还综合考虑了不同的场景对交通标志前置距离的影响.因此,交通条件变得复杂后,交通标志的前置距离就会随之增大.
理论公式是基于交通安全理论构建驾驶员行驶模型和交通标志认知模型所得的结果,虽然条件过于理想,但是和仿真结果相比偏差不大.因此,理论计算公式在实际应用中一定程度上是具有普遍适用性的,分析两者结果可知,可在理论计算数值的基础上增加20%左右作为限速标志的前置距离.
5 总结
在交通语言系统和交通流理论基础上,结合占路施工区交通特性,确定了占路施工区各功能段交通标志的类型.基于停车视距构建交通标志前置距离的计算模型,通过交通标志认知模型的研究,对各交通参数的计算进行了分析,确定了前置距离的计算公式.由于理论分析条件过于理想,运用UC w in/road仿真系统和SOAR认知模型,对上游过渡区限速标志的设置进行了仿真模拟,对不同限速值和标志前置距离进行交叉仿真实验,确定了限速值和限速标志的前置距离.与理论计算结果相比,仿真结果较大,更符合实际情况;实际应用中可以在理论计算值的基础上增加20%左右作为限速标志的前置距离.
[1]杨晓光,邵海鹏,云美萍.交通语言系统结构 [J].系统工程,2006,24(7):1-7.
[2]JTGD81-2006,公路交通安全设施设计规范 [S].
[3]曲秋莳.城市占道施工区交通组织方案优化及仿真评价 [D].北京:北京交通大学,2010.
[4]李喜华.城市占道施工对路段交通影响的研究 [D].北京:北京交通大学,2011.
[5]JTGH30-2004,公路养护安全作业规范 [S].
[6]杨少伟.道路勘测设计 [M].北京:人民交通出版社,2009.
[7]任福田.交通工程总论 [M].北京:人民交通出版社,2002.
[8]马智亮.UC-w in Road实用教程 [M].北京:中国建筑工业出版社,2010.
[9]Laird JE,NewellA,Rosenbloom PS.Soar:An architecture forgeneral intelligence[J].Artificial Intelligence,1987,33(3):1-64.
[责任编辑 杨 屹]
The theoreticalstudy and simulation of the traffic signs in urban road construction area
WEILianyu1,2,WEIKai1,FENG Lei1,LIU Yanzhu1
(1.SchoolofCivilEngineering,HebeiUniversityof Technology,Tianjin300401,China;2.CivilEngineering Technology Research Centerof HebeiProvince,Tianjin 300401,China)
Based on the theory of traffic flow and the technology of traffic simulation,thispaperstudies thesetting of the traffic signsin the road construction area taking into accountthe traffic characteristicsof thedriver,vehicles,road and environment.A fter analyzing the cognitivemodelof the traffic signs and researching the theory of traffic flow,this paper deduces the computational formulaof the parameternamely thepre-distanceof the traffic sign,which isderived under the ideal conditions.What'smore,in the application of the UCw in/road simulation system,this paper simulates the setting of the speed-limitsign in the upper transition region.On the basisof the simulation,the speed lim itvalue is determined and thepre-distanceof thespeed-lim itsign isobtained,which isa little longer than the resultof the theoreticalcalculation. Compared with the calculation resultof the pre-distance,the simulate result ismore practical.
road construction;traffic sign;simulation;the pre-distance;speed-lim it
U418.2
A
1007-2373(2016)01-0108-06
10.14081/j.cnki.hgdxb.2016.01.020
2014-06-17
河北省自然科学基金(E2013202228)
魏连雨(1957-),男(汉族),教授,博士生导师.