多成份塑料垃圾光谱分选控制原型系统研究
2017-01-05欧阳竟成湛腾西欧先锋申巧巧彭邓华刘志鹏
欧阳竟成,湛腾西,欧先锋,申巧巧,彭邓华,刘志鹏,彭 鑫
(1.湖南理工学院 信息与通信工程学院,湖南 岳阳 414006;2.复杂工业物流系统智能控制与优化湖南省重点实验室,湖南 岳阳 414006)
多成份塑料垃圾光谱分选控制原型系统研究
欧阳竟成1,2,湛腾西1,2,欧先锋1,2*,申巧巧1,2,彭邓华1,2,刘志鹏1,2,彭 鑫1,2
(1.湖南理工学院 信息与通信工程学院,湖南 岳阳 414006;2.复杂工业物流系统智能控制与优化湖南省重点实验室,湖南 岳阳 414006)
针对多种塑料垃圾混合分选问题,设计了一种基于近红外技术的逆料垃圾分选控制原型系统,各控制节点集成了CAN总线通信技术。在Labview环境下开发了系统原型,测试结果表明系统具有较快的控制分选速度与稳定的通信性能。
塑料分选;控制平台;CAN总线;近红外技术
1981年美国回收技术公司(NRT)采用检测PVC中的氯原子技术,开启了X光塑料垃圾分选时代。90年代美国研发了首台近红外光电分选机,利用近红外吸收光谱可以分辨出多种不同的塑料。2000—2010年,近红外光谱分选技术有了很好的发展。意大利Montell公司制造了TiTech NIR塑料分离系统,德国Buhler AG公司开发了NIRIKS系统,该系统能够快速鉴别废旧塑料,被测物件的最小尺寸为4 cm×4 cm,分选速度可达每秒25个扫描数据。但我国目前尚未见报道类似完整的分离系统的研究工作。
本文设计了一种基于近红外技术的多种塑料垃圾混合分选系统,利用塑料在近红外波段其透射光谱吸收峰位置与强度的不同对塑料吸收光谱进行区分与气动分选,在气动装置方面采用阀岛技术与气动智能联动等新技术,提高了塑料垃圾分选规模化与纯度。在Labview平台上开发了原型系统,主要包括数据采集与仪器控制、数据分析和数据表达等功能。
1 原型系统设计
1.1 总体结构
原型系统采用上位机、下位机、现场总线组合分层结构,上位机对下位机与CAN总线节点进行数据实时监控。下位机针对3个节点进行并行通信,同时也在现场总线上进行双向通信。依据设备测量宽度不同(1~1.5 m),光谱与气动组合单元将有10~15个左右不等。在此架构下下位机可以达到5个以上。系统终端节点由多个部分组成,各处理单元依照CAN总线通信协议与上位机或下位机进行双向通信[1]。上位机软件用Labview设计界面,将接收到的数据处理后实时显示并产生相关气动装置控制指令达到分选的目的,组合分层结构如图1所示。
1.2 下位机任务分解
1)通过并行通信,完成规定时间的设备环境温度、输送带转速等测量数据存储或结果的输出,便于以后对历史数据的查找,这也是测控系统的常规工作。
2)通过CAN总线与其他节点进行平台勤务通信。
3)如遇到非典型光谱数据,下位机直接进行并行分析与比对处理,并将光谱图像文件传上位机建模。
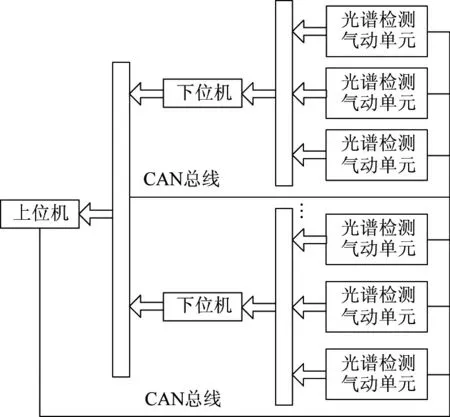
图1 原型系统分层组合整体结构
1.3 上位机任务分解
1)周期任务:每250 ms对塑料垃圾原料传送带与分选传送带的转速信号采集一次。每500 ms对温度、气压信号采集一次。因为这几个参数的惯性比较大,所以对实时性的要求不是太严格。
2)控制任务:根据对塑料垃圾分选光谱正确率的数据分析,对系统进行调节以保持塑料垃圾原料传送带转速与识别正确率在一个合适的匹配范围内;另一个重要的控制任务是气动分选联动控制信号输出。
3)动态显示任务:对整个系统的各种数据实现动态的显示,便于管理者掌握系统的状态。动态显示对系统资源的消耗较大,所以从下位机任务中分离出来,由上位机实现。
4)数据通信任务:与下位机之间的并行通信和将系统的动态数据发布到其他控制台,通过局域网实现远程监控等任务。
1.4 控制节点结构与功能
各控制节点采用CAN总线技术实现,利用STM32作为CPU,STM32通过总线控制器与CAN进行接口,采样光谱模拟信号,提取特征现场比对,能自举处理光谱图像[2],有较大的数据缓冲区,其结构如图2所示。如果特征数据可以比对,则实时数据处理任务全部通过现场总线完成,否则先通过下位机进行相关并行处理。
根据上述结构,控制节点应具有如下功能:
1)依据本单元检测到的光谱特征值,并呼叫相临通道传送检测状态与特征值,运行关联算法,产生气动动作。
2)进行总线勤务信息传送,如本节点故障,临节点异常呼叫等。
3)光谱特征值分析与检测,并进行本节点现场模式识别;若识别不成功,则通过并口将光谱文件与对应下位机进行通信。

图2 控制节点结构
2 系统原型开发
2.1 控制节点软件开发
Labview是一种图形化编程语言开发环境,简称VI,包括3部分:前面板组件、后面板框图程序和图标连接器,创建的程序结构模块化强,更易于理解,调试及维护。
根据上述控制节点的设计方案,在Labview中进行软件开发,流程如图3所示。

图3 控制节点开发流程
1)初始化
调用CAN接口卡提供的函数库中的VCI_OpenDevice()函数,此函数用于打开设备,依据调用返回值判断成功与失败。对指定的CAN接口卡进行初始化调用VCI_InitCAN()函数[3]。
2)数据接收程序
函数库中的接收函数为VCI_Receive(),此函数用于从指定设备上读取数据函数,并返回实际读取的帧数。如果返回值为0xFFFFFFFF,则表示读取数据失败,有错误发生,此时可通过VCI_ReadErrInfo()函数来获取错误码。
3)数据发送程序
为了能够让上位机进行数据发送,就必须调用CAN接口卡里面的库函数VCI_Receive()[4],并且返回一个实际发送的帧数。其中VCI_CAN_OBJ()函数是用来传输CAN的帧信息,其中参数有ID报文、TimeStamp接收的时间标识、SendType帧发送类型、RemoteFlag远程帧、ExternFlag扩展帧等函数。
4)接口卡其他相关操作
清理缓存启动CAN接口卡之后必须对缓冲区的上次数据进行一次清理,调用函数库中的VCI_ClrBuffer()函数完成此功能,调用库函数中的VCI_CloseDevie(),对设备进行关闭,依据返回值判断关闭成功与否[5]。
2.2 系统控制软件开发
1)主控界面
主控界面包括气压检测、环境温度检测、塑料分选界面和自检等模块。气压检测的范围是0~1 MPa,环境温度的检测范围是0~100 ℃。设计了气压表图标、温度表图标虚拟仪器[6]。在此实验系统的界面的中部,设计了PET、PVC、PP、PS、PE这5种塑料来分选按纽。自检模块包括光电单元自检、气动单元自检、原料输送带自检、分选输送带自检。此外,主界面设计有时钟系统的显示。
2)光电检测单元
主界面中的光电单元检测模块,可以很清楚地在控制平台主界面查看每检测每个光电接口单元关态。每次测完之后可以将数据导入Excel表存储。然后按“查询数据库”可以查看到以前的数据,还可以显示测量的时间点与设备状态。
3)气动单元功能检测
气动单元检测模块与显示气动喷头的运行情况,可以很清楚地查看是哪个气动喷头出现问题而不必到现场一个一个去查看问题。同时每次测完之后可以将它导入Excel表存储进数据库,然后按“查询数据库”可以查看到以前的数据,还可以显示测量的时间。
4)各输送带检测界面与功能配置
原料输送带需要调试其传送速度与光电单元识别延迟之间的匹配关系,与气动单元气流速度之间的关系。同时需要监控输送带运行时长,发热状态,生产率等相关数据。
上述各部分功能开发流程如图4所示。

图4 系统软件功能开发流程
3 测试结果与分析
按各光电单元所对应的输送带位置,首选进行单轨测试,判断各通道光电单元与气动单元的动作情况;然后,测试多轨道联动功能情况,结果如表1所示。

表1 传送带与光谱识别匹配测试结果
为了专门测试传送带速度与光谱识别速度匹配性能,必须洗干净塑料瓶,并去除标签与瓶盖,以消除由于塑料瓶不洁导致的光谱识别误差。实验时,首先可以将传送带速度调低,测量动作正确率,当继续调低传送带速度,但动作正确率不再提高时,此时的传送带速度即为与光谱识别的匹配速度。分选后的传送带不做这类匹配性实验,其速度满足吞吐量的需要与平衡就可以了。当采用实际塑料垃圾进行实验时,由于受瓶盖与标签及污物的影响,其动作降正确率将略有降低。
4 结语
基于Labview虚拟仪器软件技术及CAN总线来构建的塑料垃圾分选原型系统,能够让控制平台与下位机部分多节点、多门类测控部件之间通信,并且具有结构简单、性能稳定、通信距离远、能适应复杂的环境、防干扰能力强、安全性高等优点,同时下位机采用MSP430,价格低廉,外设器件少,较好地节省了成本。本系统与其他文本语言开发的系统相比,其数据采集系统开发周期短,实用性较强,数据处理简单方便,并且可重复开发,对软件可以进行及时地升级。但是,本系统尚不能支持在线升级功能,需要进行进一步的研发和改进。
[1] 龚崇权.基于现场总线技术的虚拟仪器开发[J].微计算机信息,2006,22(S2):177-178.
[2] 朱海志,杨建武,孙树文.基于现场总线与虚拟仪器的车辆监控系统[J].微计算机信息,2006,22(20):1-3.
[3] 于洁,钟佩思.信号发生器在虚拟仪器界面中的设计与实现[J].山东理工大学学报(自然科学版),2005,19(2):106-110.
[4] 范福玲,韩建勋.基于Labview的虚拟信号发生器的设计[J].中原工学院学报,2006,17(4):26-28.
[5] 李广才,聂东.一种新型多功能虚拟信号发生器的设计[J].肇庆学院学报,2008,29(2):25-28.
[6] 刘连生,汪海兵.基于虚拟仪器信号发生器设计与实现[J].中国民航大学学报,2007,25(S1):122-123.
Research of the Multicomponent Plastic Refuses Spectrum Selection Control Prototype System
OUYANGJingcheng1,2,ZHANTengxi1,2,OUXianfeng1,2*,SHENQiaoqiao1,2,PENGDenghua1,2,LIUZhipeng1,2,PENGXin1,2
(1. College of Information & Communication Engineering, Hunan Institute of Science & Technology, Yueyang 414006, China; 2.Key Laboratory of Hunan Province on Intelligent Control and Optimization of Complex Industrial Logistics system, Yueyang 414006, China)
This paper designs a plastic refuse selection control prototype system based on near infrared technology, in which all of the control nodes integrate CAN bus communication technology. We develop this prototype system under Labview-based environment, and the results of the test show our system has a fast selection speed and stable communication performance.
plastic refuse selection; control platform; CAN bus; near infrared technology
10.13542/j.cnki.51-1747/tn.2016.04.016
2016-11-07
国家自然科学基金“多接口车联网可变带宽信道分配算法研究”(61300039);湖南省科技计划项目“塑料垃圾近红外光电分选设备成套技术研究”(2015SK20693)
欧阳竟成(1967— ),男(汉族),湖南平江人,副教授,博士,研究方向:智能信息处理。 欧先锋(1983— ),男(汉族),湖南郴州人,讲师,博士,研究方向:图像处理、视频压缩编码及传输,通信作者邮箱:ouxf123@qq.com。
TP391
A
2095-5383(2016)04-0063-04