一种砼杆攀爬工作平台的设计
2017-01-05莫盛秋
莫盛秋
(常州信息职业技术学院机电工程学院 江苏常州 213164)
一种砼杆攀爬工作平台的设计
莫盛秋
(常州信息职业技术学院机电工程学院 江苏常州 213164)
介绍了一种用于电力设备安装、检修的砼杆攀爬工作平台的设计。重点阐述了砼杆攀爬检修平台的结构、组成和工作原理,分析了砼杆攀爬工作平台受力情况、性能特点及实际应用。通过砼杆攀爬工作平台,可将电力设备安装维修人员和相关器材运送到砼杆高处,极大地降低了作业人员的劳动强度,提高了电力设备架设安装的工作效率,同时能确保工作人员的安全。
砼杆; 攀爬; 工作平台; 电力设备
0 引言
随着我国电力事业的发展,需要架设的电杆越来越多,有时为适应高压输电要求,电杆架设得也越来越高。在我国一些地方,特别是一些交通不便的地区,电力设施的安装,特别是高空电力设施的安装维修主要是依靠人工攀爬至砼杆高处进行操作。这种靠人力攀爬电杆,向高处输送器材以及对电力设施进行检测维护的工作方式,劳动强度大、生产效率低。故人们迫切需要一种能够攀爬砼杆的设备来帮助完成这些工作。随着我国城市现代化的发展、城市照明和城市亮化工程不断推进,一些广场的灯杆、路灯灯杆不断增高,这对灯具的安装、检测和维修、材料的运送提出了新的要求,也需要一种能够攀爬灯杆的设备来帮助完成这些工作。
本设计的目的是为人们提供一种结构简单、操作方便、功能完善、安全可靠的,能够在杆类、柱状的物体进行上下攀爬,帮助人们运送物资、器材,或开展观测、作业的设备,以减轻相关行业工作人员的劳动强度,提高工作效率[1]。
1 砼杆攀爬工作平台组成
砼杆攀爬工作平台的结构如图1所示。其主要由齿轮齿条滑动攀爬机构、卡扣锁紧机构、抱箍旋转机构、作业平台框架和动力及电气控制系统5个部分组成[2]。
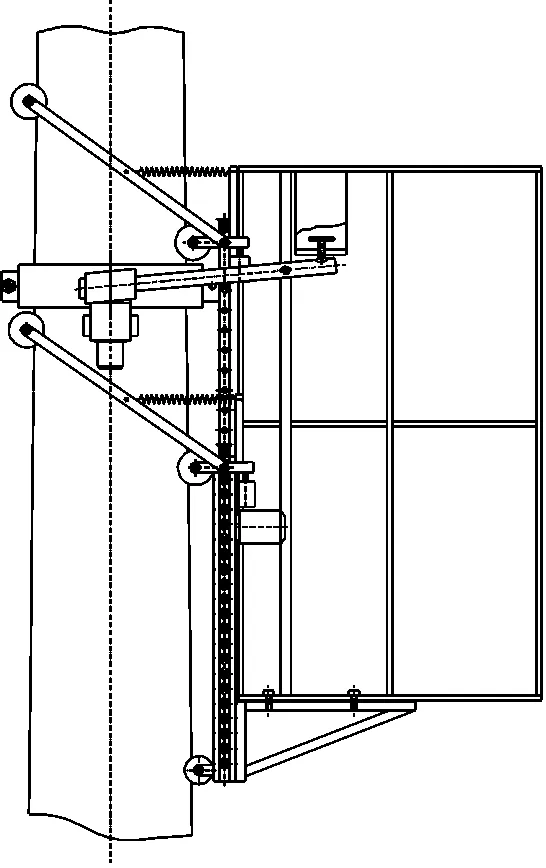
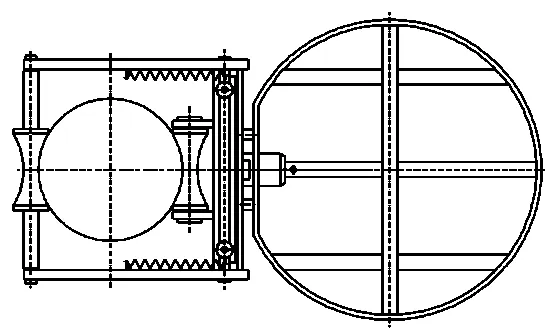
图1 砼杆攀爬工作平台结构图
1.1 齿轮齿条滑动攀爬机构
齿轮齿条滑动攀爬机构主要有内滑臂、外滑套、主电机、单向导轮、轴承A、轴承B、齿条及齿轮等零件。其结构见图2所示。
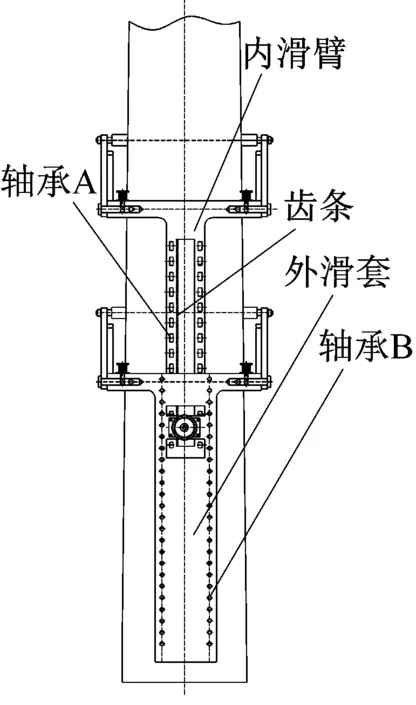
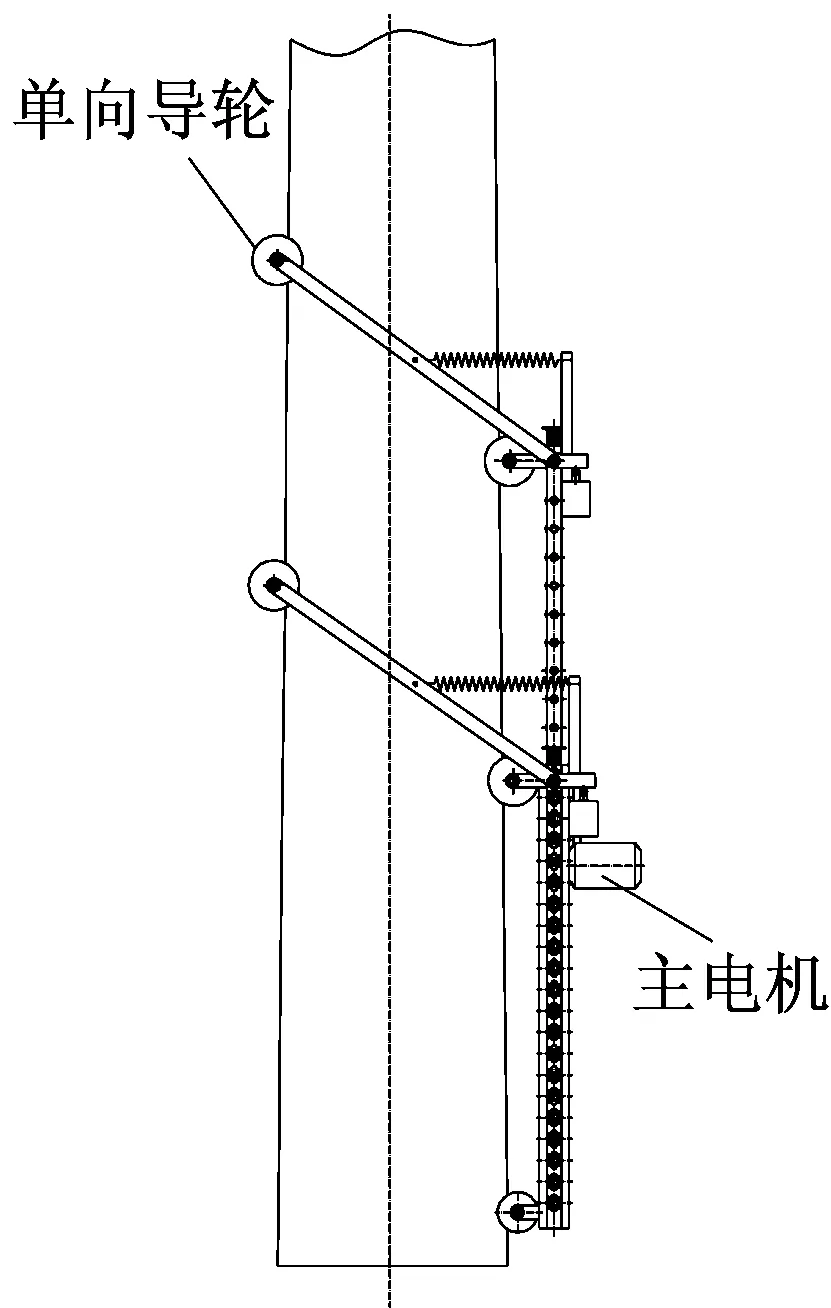
图2 齿轮齿条滑动攀爬结构图
内滑臂安装在外滑套中,轴承A和轴承B能防止内滑臂向左右、前后倾斜,使其只能在外滑套中垂直上下运动。内滑臂和外滑套上的单向导轮在机构上升时能滚动,下降时不能滚动,可阻止机构下滑。齿轮安装在电机轴上(图中电机遮盖部分),与齿条啮合[3]。
1.2 卡扣锁紧机构
卡扣锁紧机构见图3所示。
卡扣锁紧机构包括滚轴、单向滚轮、卡扣左臂、卡扣右臂、卡扣拉簧等零件[4]。机构的内滑臂和外滑套上各安装有一只卡扣。卡扣是通过活动轴、插销等零件分别与内滑臂、外滑套相连接。
1.3 抱箍旋转机构
抱箍旋转机构如图4所示。
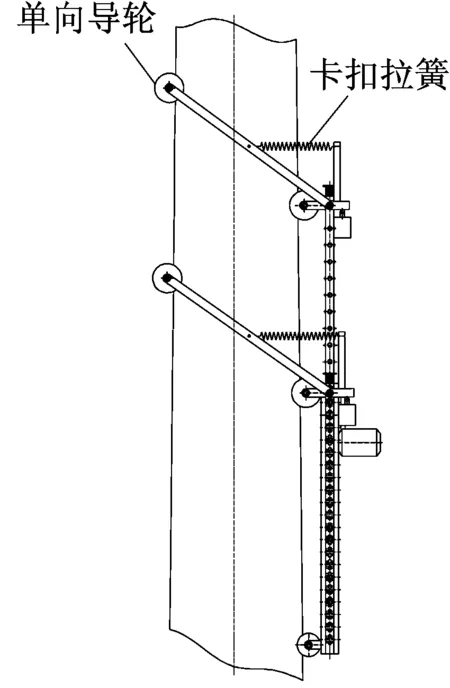
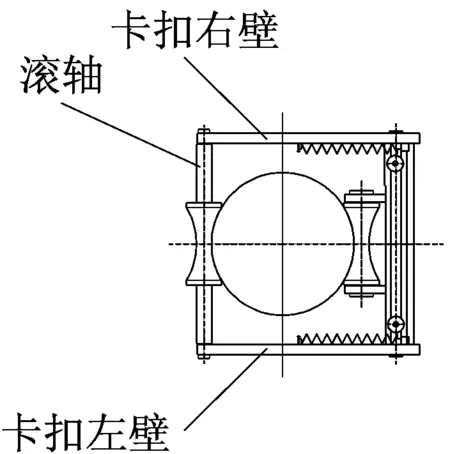
图3 卡扣锁紧机构结构图
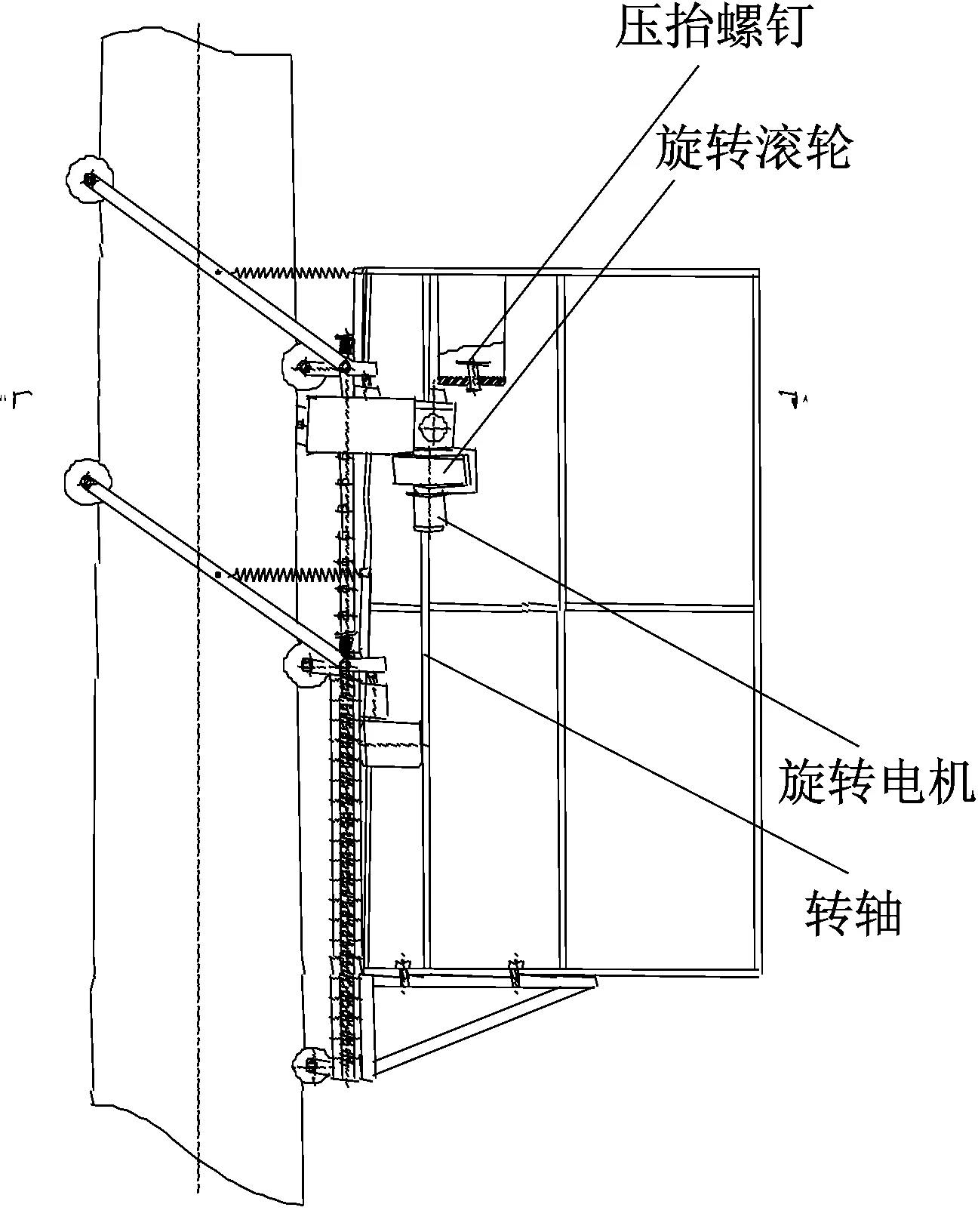
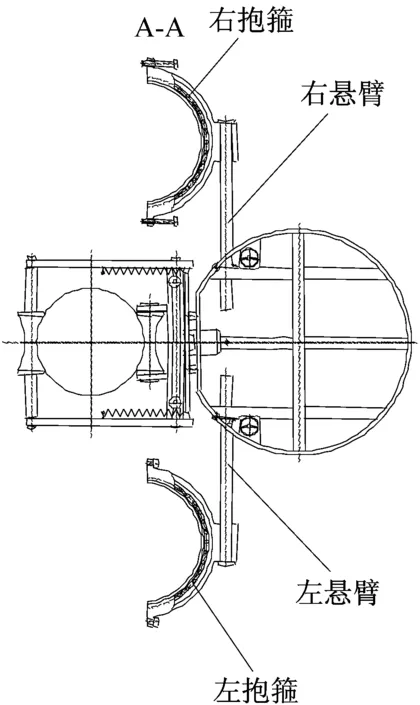
图4 抱箍旋转机构结构图
抱箍旋转机构包括左抱箍、右抱箍、左悬臂、右悬臂、压抬螺钉、旋转滚轮及旋转电机等零部件。抱箍内装有滚针轴承,左右抱箍通过螺钉连接抱紧。悬臂一端与抱箍连接,当中与转轴铰接,另一端悬于压顶螺钉之下。
1.4 工作平台框架
砼杆攀爬工作平台框架主要由平台支架、工作平台框架等部件组成,它们都是与外滑套连接。工作平台框架用于装载作业人员、电力维护工具等。
1.5 动力及电气控制系统
工作平台动力由蓄电池提供,电气控制系统包括主电机、旋转电机、电磁阀及控制电路板等,用于控制砼杆攀爬工作平台的升降、旋转等过程。
2 砼杆攀爬工作平台的工作原理
平台攀爬:主电机顺时针转动,其端部的齿轮推动安装于内滑臂上的齿条向上升出,而外滑套通过卡扣夹紧在电杆原位不动,内滑臂升到一定高度后停止。此时电机反转,齿轮连同电机,带动外滑套顺着齿条上升,而内滑臂通过卡扣夹紧电杆在原位不动,如此交替循环即可攀登到所需高度[5]。
平台下降:给内滑臂上的电磁阀通电,电磁阀将卡扣顶起一个角度,使其无法卡紧主电杆,此时齿轮做逆时针运动,内滑臂上的齿条被齿轮逐步下拉,而外滑套不动。内滑臂下降到达一定位置时停下,电磁阀失电,卡口将内滑臂夹紧,此时,外滑套上的电磁阀得电,顶起外滑套上的卡口,使其无法夹紧电杆。当齿轮做顺时针转动时,连同电机、外滑套顺着齿条一同下降,直至到达需要的位置后,电磁阀失电而停止。内滑臂下行卡扣工作示意图见图5所示。
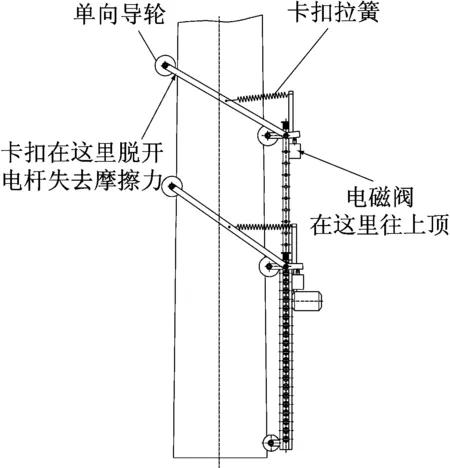
图5 内滑臂下行卡扣工作示意图
跨越横担:当工作平台在电杆上攀爬遇到横担时,卡扣受阻便无法继续攀升,此时,平台上的工作人员先用一只手将内滑臂卡口上的卡销往上拔起,然后用另一只手将活动轴拔出,此时卡扣左臂脱离内滑臂。用同样的方法卸卡扣右臂,此时卡扣完全与内滑臂分开,当内滑臂上升超过横担时,再把卡扣安装上。同理,外滑套的卡扣也能顺利跨越横担。工作平台跨越横担见图6所示。
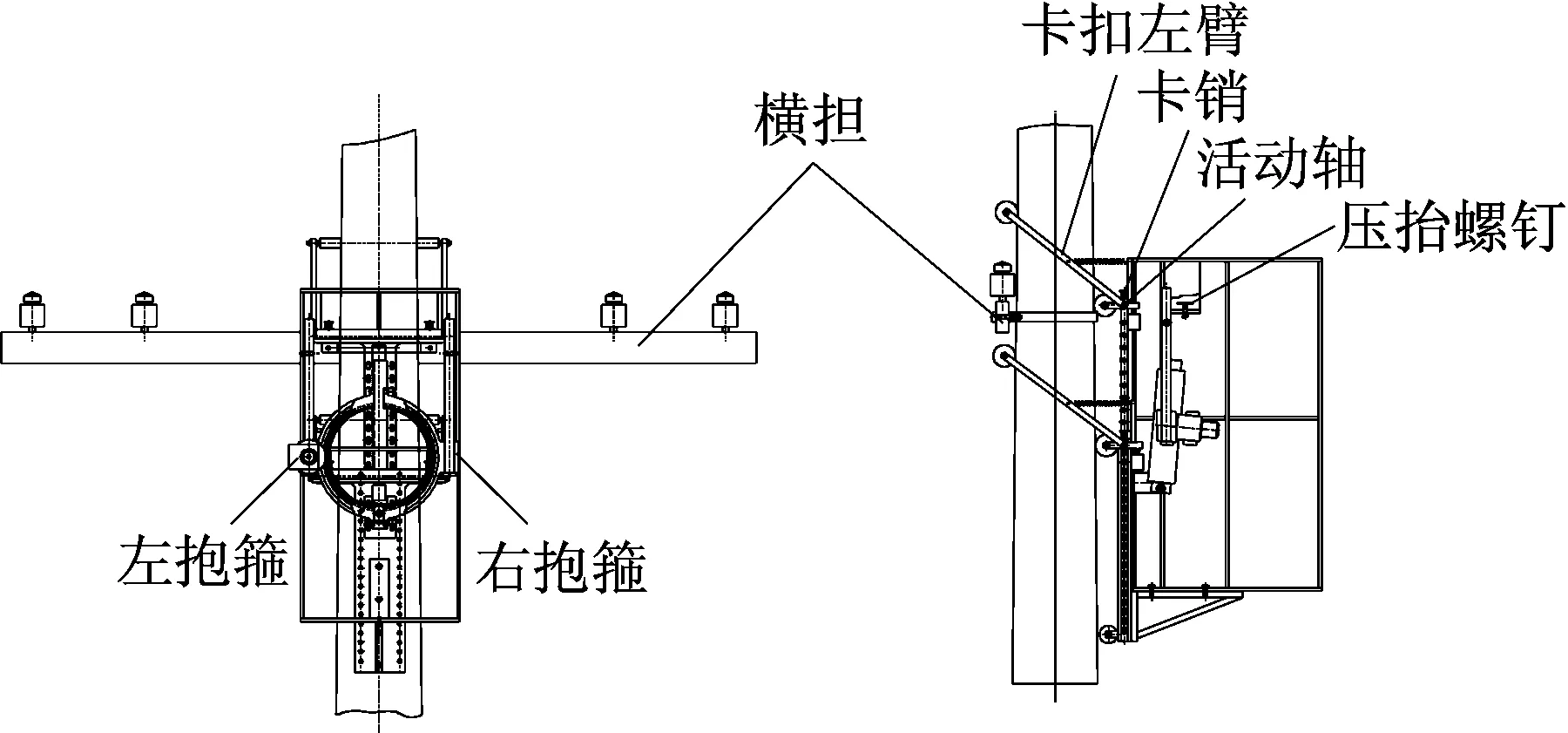
图6 工作平台跨越横担示意图
平台旋转:当平台内的工作人员完成砼杆上一个工位的工作后,需要换另一个工位开展工作,而且两工位距离较大,原位置无法够着,需要用到平台旋转功能。首先由平台上工作人员分别将左旋臂和右旋臂抬起,将其合拢抱住砼杆,分别用前螺钉和后螺钉将两抱箍连接夹紧电杆。然后旋动平台框架内两侧的压抬螺钉,将平台的重量转移到左右两根悬臂上,两只卡扣与电杆松开。此时给旋转电机送电,旋转滚轮即带动平台围绕砼杆转动,到达所需的工作位置。工作平台旋转见图7所示。
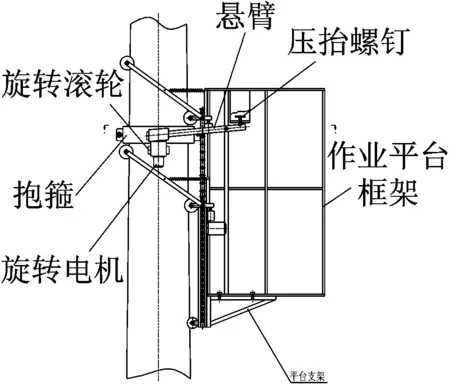
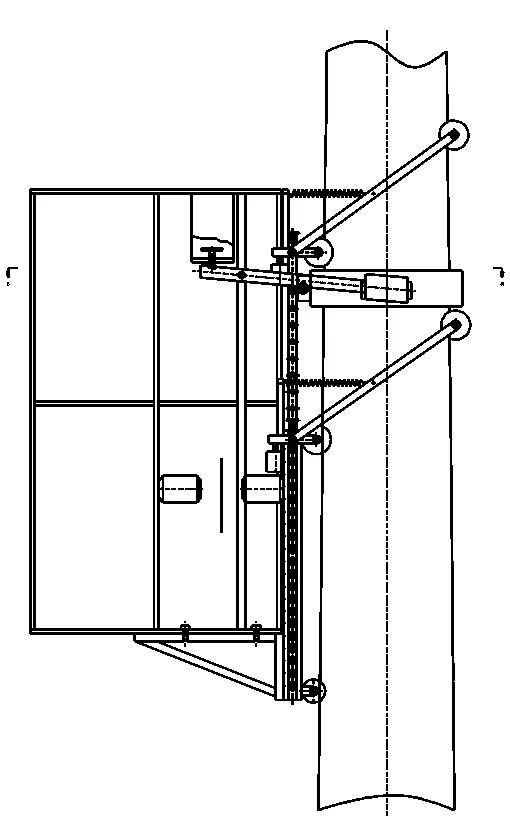
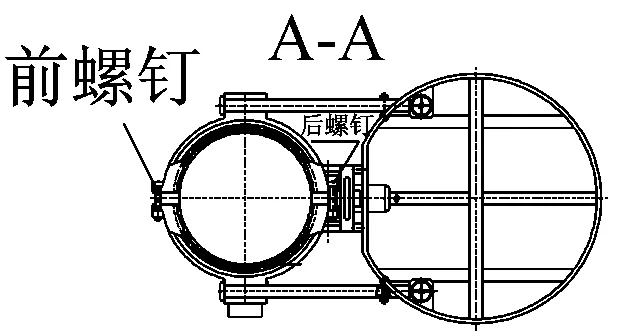
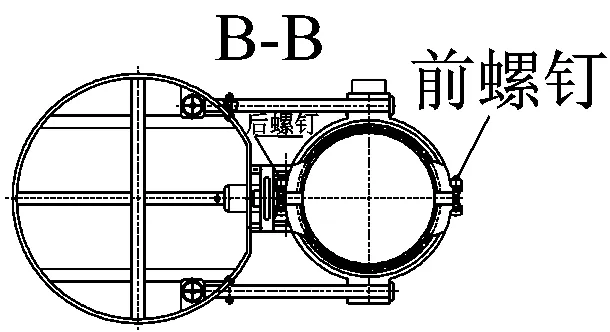
图7 工作平台旋转示意图
3 砼杆攀爬工作平台受力分析
砼杆攀爬工作平台的每一个卡扣都是一个受力平衡单元,下面将单个卡扣受力情况进行分析。卡扣锁紧机构受力如图8所示。
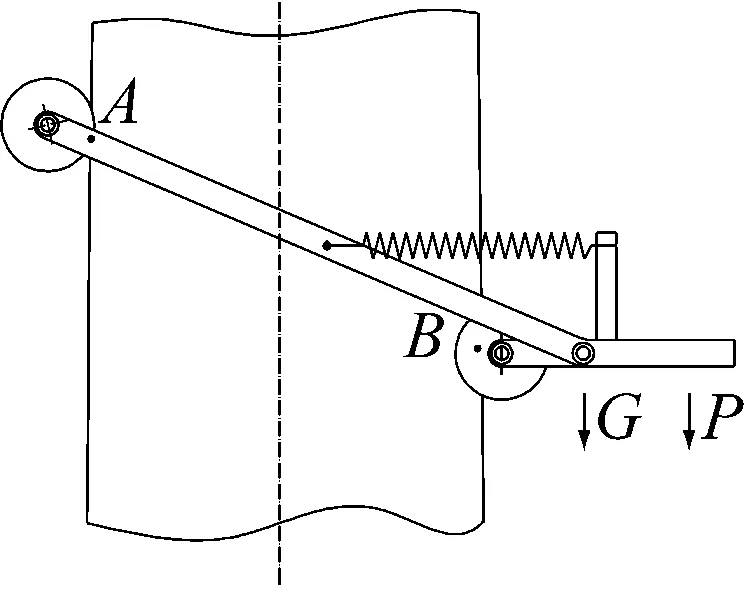
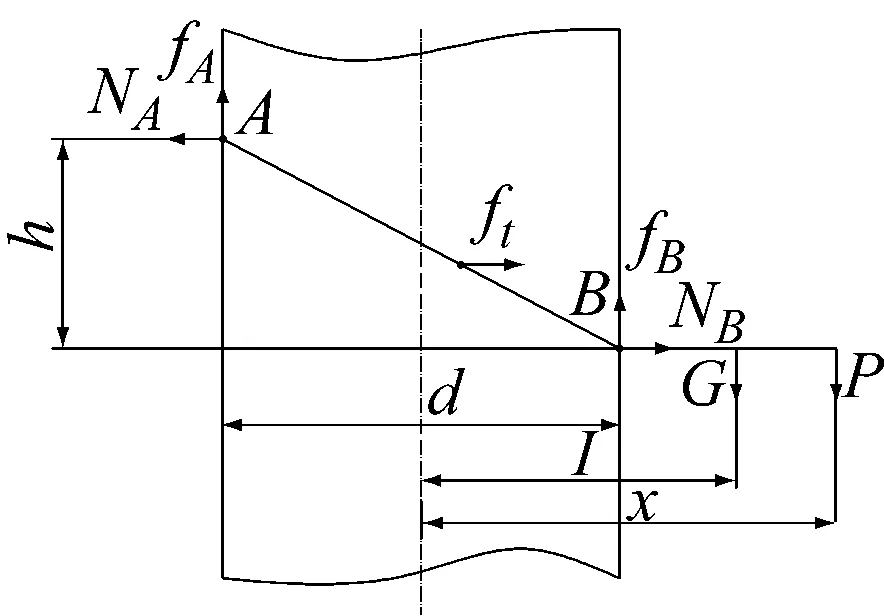
图8 卡扣锁紧机构受力分析图
从图8中可以看出,A、B两处为单向轮,杆体与卡扣的接触可看作是静摩擦。此时卡扣共受到七个力的作用,其中G为平台自身重力,P为承载的重力,NA为砼杆对滚轮A的支持力,fA为砼杆对滚轮A的静摩檫力,NB为砼杆对滚轮B的支持力,fB为砼杆对滚轮B的静摩檫力,ft为弹簧力,因其力较小,且是对锁紧有利,故在此忽略。若要使卡扣受力平衡,需要满足如下条件:
NA=NB
(1)
fA+fB=G+P
(2)
设砼杆直径为d,平台重心至砼杆中心距离为l,负载重心至砼杆中心距离为x,两滚轮高度差为h。现取各个力对A点的力矩侧有:
(3)

(2μl-h)G≥(h-2μx)P
(4)
4 砼杆攀爬工作平台的性能与特点
砼杆攀爬工作平台能攀爬多个型号的砼杆。由于砼杆攀爬工作平台的卡扣角度可以自动调节,所以能够自动攀爬多种直径不同的砼杆。砼杆攀爬工作平台能跨越障碍。由于卡扣可以快速拆卸,故在攀爬过程中,当遇到砼杆上的障碍时,可先后把卡扣卸下即可分步通过障碍,突破了平台在砼杆上垂直运动的瓶颈。砼杆攀爬检修平台攀爬速度较高,每分钟不低于8米。砼杆攀爬检修平台可实现360°水平旋转,便于工作人员开展各种位置的作业,工作范围广。砼杆攀爬工作平台安全可靠,能在任意位置锁定。砼杆攀爬工作平台能减轻电力检修人员劳动强度,能够帮助工作人员提高工作效率。砼杆攀爬工作平台采用锂电池驱动整个系统,工作时不需外接电源,其容量满足连续工作4小时。自重小,载荷大,砼杆攀爬工作平台攀爬平台自重在40 kg以下,荷载达120 kg以上,运输方便。
5 结束语
砼杆攀爬工作平台主要用于在砼杆上开展电力设备安装维修,向高处运送人员和器材的工具。随着电力事业的发展,需要架设的电力设备也越来越多,现在主要靠人工来完成,劳动强度大,生产效率低,不能跟上经济发展的需要。随着砼杆攀爬工作平台的使用,将能够在很大程度上减轻人们的劳动强度,提高生产效率,故砼杆攀爬工作平台具有很好的市场前景。
[1] 吴宇泽.机械结构设计准则与实例[M].北京:机械工业出版社,2006:150-152.
[2] 王继成.产品设计中的人机工程学[M].北京:化学工业出版社,2004:210-211.
[3] 王良才,张文信,黄阳.机械设计基础[M].北京:北京大学出版社,2007:201-205.
[4] 戴振东,岳林.机械设计基础[M].北京:国防工业出版社,2005:334-347.
[5] 杨家军.机械系统创新设计[M].武汉:华中科技大学出版社,1999:75-77.
[责任编辑:李娟]
Design of a Concrete Pole Climbing Platform
MO Shengqiu
(Department of Mechanical and Electronical Engineering, Changzhou College of Information Technology, Changzhou 213164, China)
This paper introduces a design of a concrete pole climbing platform. It focuses on the structure, composition and working principle of the concrete pole climbing and maintenance platform, analyzes the stress concrete pole climbing working platform, performance characteristics and application. Through the concrete pole climbing working platform, power equipment installation maintenance personnel and related equipment can be transported to the top of pole, which can greatly reduce the labor intensity of workers, improve the equipment erection installation work efficiency, and ensure the safety of operating personnel.
concrete pole; climbing; working platform; electric power equipment
2016-09-04
莫盛秋(1957-),男,研究员级高级工程师,主要研究方向:机械创新设计、精密模具设计
TM 753
B
1672-2434(2016)06-0016-04