部分可观Petri网系统的在线故障诊断方法
2017-01-04彭晓红刘文良刘文渊刘海阳鲍建成刘久富
彭晓红 刘文良 于 杰 孙 燕 刘文渊 刘海阳 鲍建成 刘久富
(1.江苏海事职业技术学院信息工程系,211170,南京; 2.南京航空航天大学自动化学院,210016,南京 ; 3.东南大学电子科学与工程学院,210096,南京∥第一作者,助理研究员)
部分可观Petri网系统的在线故障诊断方法
彭晓红1刘文良2于 杰2孙 燕2刘文渊2刘海阳3鲍建成1刘久富2
(1.江苏海事职业技术学院信息工程系,211170,南京; 2.南京航空航天大学自动化学院,210016,南京 ; 3.东南大学电子科学与工程学院,210096,南京∥第一作者,助理研究员)
针对Petri网系统故障检测与诊断过程中存在状态枚举及随后的状态爆炸问题,采用整数线性规划方法,提出了Petri网系统的在线故障诊断算法。算法将故障表示为Petri网模型的不可观变迁,定义了故障诊断器函数,通过可观的变迁序列,诊断系统行为是否出现故障。该算法避免了状态空间爆炸,降低了在线运算量的复杂性。以地铁列车进出站系统为实例,对地铁列车进出站系统进行含不可观变迁Petri网建模,应用提出的算法对铁列车进出站系统故障进行诊断。试验表明,该算法能有效应用于地铁列车进出站过程在线故障诊断。
地铁; Petri网; 故障诊断; 不可观变迁; 整数线性规划
First-author′s address Department of Information Engineering,Jiangsu Maritime Institute,211170,Nanjing,China
Petri网(PN)作为一个网系统,具有直观的图形表示和严密的数学基础双重特性,常被广泛应用于离散事件系统(Discrete Event System,DES)中。地铁列车的故障检测与诊断研究即属于DES。
基于Petri网的DES故障检测与诊断技术研究成果当前主要包括解释诊断器、编译诊断器、PN架构中在线故障检测策略、G-标识法及针对在线异步诊断的网展开法等算法。不同算法的适用条件不一定相同,同时也有各自的优缺点。
解释诊断器算法计算量大、不需要计算状态空间、存储器需求量小,可用于计算在线故障或故障状态[1-7]。编译诊断器算法需要收集系统可能发生的故障集或系统可能出现的故障状态;建立编译诊断器需要的计算量很大,同时也需要大量的存储器;诊断器可离线运行,但会导致状态空间很大。PN架构中在线故障检测策略可避免当系统框架变化的时候重新设计和重新定义诊断器的工作。针对在线异步诊断的网展开法会引起解释诊断,其状态爆炸受到良好的控制,但计算量可能会增长[8]。
有的地铁列车进出站系统在Petri网模型框架下采用整数线性规划约束[1]来实现系统故障的检测与诊断。该方法的优势在于避免了状态空间爆炸而且将诊断器设计为缺乏离线计算的解释诊断器。此外,通过合理的离线估计,计算量可以进一步被减小。同时为防止离线计算的复杂性和耗时性,地铁列车进出站系统故障的检测与诊断方法可以完全运行于在线状态,从而使得地铁进出站系统故障能及时被检测与诊断。
1 在线故障诊断方法

不可观诱导子网PNuTuPN,可由PN去掉T
LabeledPetriNets(标记Petri网)如给定系统PN,则称函数λ:T→E∪{ε}为其变迁标记函数[9]。该函数分配到每个变迁t∈T的结果要么是ei∈E要么为空串ε。
若t∈Tu,则λ(t)=ε;若t∈To,则λ(t)≠ε。
1.1 系统故障行为描述


给定初始标识M0∈(n)及满足M0[σ0〉的可观变迁序列σ0,则:
σ0在M0处的解释集为:
σ0在M0处包含故障fk的解释集为:
1.2 Petri网模型假设及故障诊断器
假设:
(H1)系统可由网PN=(P,T,Pre,Post)模型化,并且初始标识M0已知;
(H2)To=E中与变迁点相关的标记是可观的;
(H3)子网PNuTuPN为非循环的。
条件(H1)和(H2)是显示系统知识水平的假设,(H3)是基于PN模型的故障检测领域中共同采用的假设:不可观变迁的循环是不容许的。在(H3)的假设下,易知用于PNu的状态方程无虚伪的解。因此,它可以用来计算与可解释可观变迁点火的不可观序列相关的点火计数向量。
(1) 若对任意fk∈Δf都有∑(M0,σ0,fk)=∅,则Φ(M0,w)={N},在w中由于不存在包含与观测器一致的变迁τk∈Tf的点火序列,系统行为无故障。
(2)Φ(M0,w)={fk∈Δf|∑(M0,σ0,fk)≠∅,且σ0=w},系统行为在观测字w中出现故障。在这种情形下故障诊断器提供可能包含在与观测字相一致的序列中的故障fk∈Δf。
(3)Φ(M0,w)={fk∈Δf|∑(M0,σ0,fk)≠∅,且σ0=w}∪{N},系统的行为可能有故障,因为故障fk∈Δf可能在w中已经发生,也可能系统行为无故障。
1.3 故障诊断器的线性约束
在线工作的故障诊断器Φ的程序中,对于每个初始标识M0∈(m),在被w∈L的点火处,文献[10]中的定理2给出了每个在M0处的发生与被观测序列σo=w相一致的序列σ∈T(*)的线性代数特征。该定理允许去证实诊断器并将系统的行为特征划分为无故障、故障已发生及故障可能已发生3种状态。
文献[10]中的定理1即为诊断器线性约束条件。已知DES由语言L描述,并由PN系统〈PN,M0〉模型化,且满足条件(H1)~(H3)。当且仅当存在h个点火向量σu1,…,σui,…,σuh满足下列线性约束:
(1)
则给定的1个观测字w∈L(w=σo=tα1tα2…tαh)及一个点火序列σ=σu1tα1…σuhtαh,(|σui|≥0,i=1,2,…,h)满足σ∈∑(M0,σ0)。
文献[10]中的定理2为已知DES由语言L描述,并由PN=〈PN,M0〉模型化,且满足条件(H1)~(H3)。给定一个观测字w∈L (w=σo=tα1tα2…tαh),定义如下整数线性规划(IntegerLinearProgramming,ILP)问题:
(2)
(3)

1.4 故障检测与诊断算法
本文提出基于Petri网模型及整数线性规划的在线故障检测算法(见图1)。算法的输入为初始标识M0、PN结构PN=(P,T,Pre,Post)及DES的可观测事件。将PN结构中变迁划分为T=To∪Tu,Tu=Tf∪Tnf,并确定变迁标记函数λ。
初始化算法中变量w,h,σo,记录事件并等待新事件e被观测。若字w (|w|=h)已被观测,则通过标记函数λ得到w=λ(σ)且σo=tα1tα2…tαh=w ∈σ(其中tαi∈To,i=1,2,…,h)。此外,定义一个维数为F的向量φmax,对于任意fθ∈Δf,φmax致力于存储ILPP1这个目标函数的最大值。

图1 基于整数线性规划的Petri网模型故障诊断器算法
算法的第4步求解ILPP1和ILPP2,即在约束条件ξ(w,M0,Post,Pre)下求得目标函数z1=φmax(σu1,σu2,…,σuh)、z2=φmin(σu1,σu2,…,σuh)的最优解。
第5步中根据第4步中求得的解来诊断系统行为是否出现故障。
3) 若对于fθ,z1>0且z2=0,则系统故障可能已发生,且算法设置Φ(M0,w)=Φ(M0,w)∪{N}。
第6步返回记录事件,算法跳至第3步进行循环计算,直至没有新的事件被观测。
1.5 算法复杂性分析
虽然整数线性规划作为一个标准的数学工具可被用作在DES中求解问题的数学方法,但是基于整数线性规划算法的在线计算量却是随着被观测变迁数目的增加而增大的。为克服这个缺点,本文使用不可观诱导子网的方法,并表明若不可观测子网享有合适的性质,算法的解可能由低计算复杂性而求得。
文献[10]中的定理3指出若不可观子网为非循环SM,则由图1所示的基于整数线性规划及Petri网模型的故障诊断器算法公式化的每个ILP问题的解都可以作为LP问题的解来获得,即多项式复杂性。
通过获得不可观诱导子网及整数线性规划来对系统行为进行诊断,与仅根据原网PN,M0来对系统行为进行诊断时所需的计算量相比较,所提出的算法的复杂性远远低于原网方法。
2 地铁列车进出站系统故障检测与验证
2.1 地铁列车进出站系统Petri网模型
地铁的正常运行主要由列车控制中心、列车自动控制系统、通信设备及相关传感器等共同实现。
地铁列车进出站过程主要实现列车进出站时与列车控制中心的通信、速度调节、上下客服务及制动与起动等功能,通常由地铁列车自动控制(Automatic Train Control,ATC)系统操作完成。地铁ATC从功能上可以划分为地铁列车自动驾驶(Automatic Train Operation,ATO)系统、地铁列车自动监控(Automatic Train Supervision,ATS)系统及地铁列车自动保护(Automatic Train Protection,ATP)系统。ATP系统负责地铁列车的全部运行保护,以确保列车的安全运行,ATS系统自动实时监控地铁列车的运行情况并及时向列车控制中心反馈信息,而ATO系统则根据ATP系统提供的运行信息和ATS系统提供的运行调整命令,对地铁列车实现自动驾驶功能。
本文所研究的地铁列车ATC系统运行过程如下:地铁进站前向地铁列车控制中心发送进站请求信号,列车控制中心在进站允许的条件下回复进站请求应答信号,同时ATS系统实时显示列车进站信息至地铁车站显示屏上。地铁列车收到应答信号后在速度传感器的作用下进行2次减速至低速滑行,通过刹车制动系统使列车最终停靠在合理的位置,打开2道车门提供上下客服务。ATC延迟一段时间后关闭ATC,并向列车控制中心发送请求出站信号,列车收到应答信号后开始加速至正常运行速度,直至即将到达下一车站的状态又开始进行上述的循环。列车的整个运行过程中,ATP系统始终保持工作状态,以确保列车的安全运行、通信设备中信息的安全传输及乘客的人身安全。
地铁列车进出站系统是一个典型的离散事件系统,可通过Petri网模型化,且初始标识为已知,满足条件(H1)。整个地铁列车的进出站系统Petri网模型如图2所示。图2中各库所、变迁的含义及变迁是否可观如表1及表2所示。

图2 地铁列车进出站系统的Petri网模型
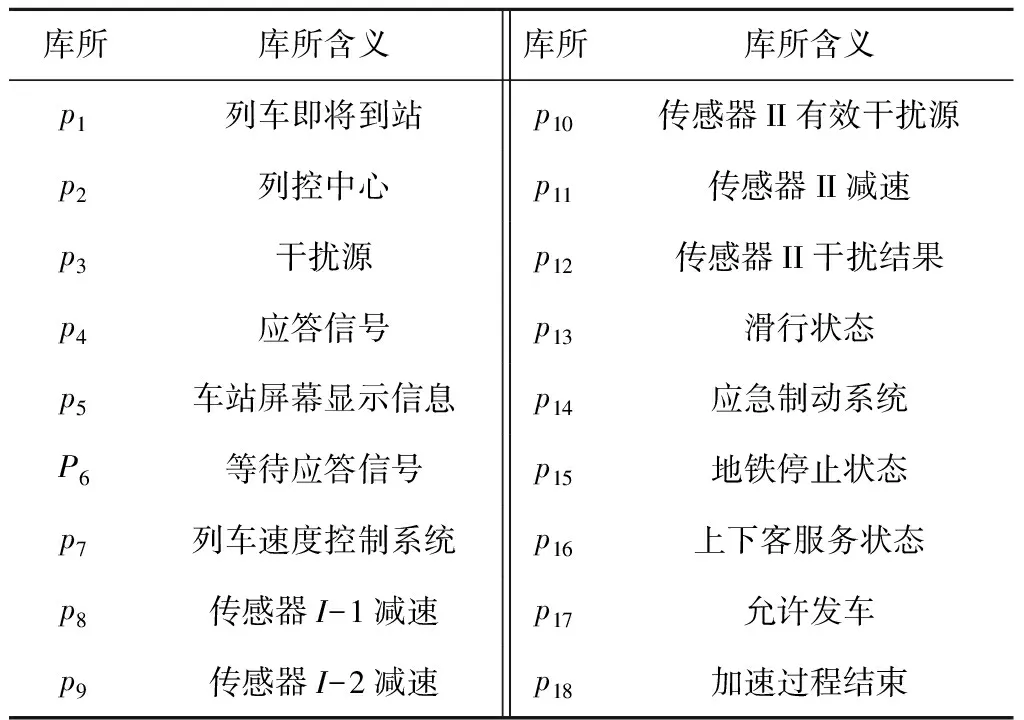
库所库所含义库所库所含义p1列车即将到站p10传感器II有效干扰源p2列控中心p11传感器II减速p3干扰源p12传感器II干扰结果p4应答信号p13滑行状态p5车站屏幕显示信息p14应急制动系统P6等待应答信号p15地铁停止状态p7列车速度控制系统p16上下客服务状态p8传感器I-1减速p17允许发车p9传感器I-2减速p18加速过程结束

表2 地铁列车进出站系统Petri网
图2中,列车即将到站(p1)时发出进站请求信号(t1)进入等待应答信号(p6)状态,列车控制中心p2接收列车的进站请求(t2)信号后进行调度分析,产生应答信号p4激发变迁t4实现ATS记录数据、集中显示的更新,同时激发变迁t5接收应答信号。p5为地铁车站屏幕上更新的列车实时信息,它通过变迁t4将ATS记录的信息反馈至地铁列车控制中心p1。列车接收到应答信号(t5)后开始施行减速,列车速度控制系统p7开始工作,p7根据速度传感器I、II返回的速度信号进行速度调节。t6、t8为主传感器I、II测速过程,t7、t9为备用传感器I、II测速过程,ATC系统根据传感器I、II测得的速度分别进行减速,最后滑行(变迁t11点火)到一定距离(p13状态)后启动地铁列车制动系统。t13为常用制动器,当常用制动器出现故障(变迁t14点火)时,启动应急制动器p15,应急制动器开始工作(t15点火)实现制动。列车制动系统制动完成后,列车最终停靠在指定地点后(p15状态)打开车门及车站安全门(t16点火)为乘客提供上下客服务(p16状态)。上下客服务结束后,关闭车门和车站安全门并发出离站发车请求(t17点火),获得发车请求应答(p17状态)后,列车加速(t18点火)至正常速度行驶状态p18,并开始正常运行(t19点火)直至下一车站即将到来(p1状态)。
p3为轨道附近可能存在的干扰源,对主/备用传感器II进行干扰,干扰结果p12通过变迁t12将干扰结果反馈至库所p3,成为新的可能的干扰源。
2.2 地铁列车进出站系统故障检测
假设{τ7=f1,τ9=f2,τ14=f3}∈Tf分别模型化系统的3个与故障相关的不可观变迁,即备用测速传感器I、II运行故障,正常刹车故障;设{τ2,τ5,τ6,τ12,τ13,τ18}∈Tnf,模型化地铁列车ATC的Petri网模型中与故障非相关的寂静变迁。假设系统观测字w为t1t4t10t8t11t10t11t15t16t16t17t19,且已知系统的初始标识为M0=[1 1 1 0 … 0]。
可得到图2所示的地铁列车进出站系统Petri网模型的不可观诱导子网PNuTuPN,如图3所示。

图3 地铁进出站系统Petri网模型的PNuTuPN子网
由图3知,地铁进出站系统Petri网模型的不可观诱导子网PNuTuPN为非周期的,满足条件(H3)。
根据上述确定的算法输入,使用图1所示的算法来对地铁列车进出站系统行为进行故障检测与诊断,得到如表3所示的理论运算结果。表4为地铁列车进出站系统实际运行100次后对系统行为的统计结果。
表3中,w为t1表示列车发送进站请求信号这一事件,系统行为无故障。w为t1t4表示列车发送进站请求信号后列控中心接收到请求信号后及时发送应答信号至地铁列车,并通过ATS记录数据、集中显示列车进站信息至车站和列控中心,系统行为无故障,序列σ=t1τ2τ3t4可能已经发生。
在初始标识M0=[1 1 1 0 … 0]下,且w=t1t4t10被观测时,变迁τ6可能在t10之前已经点火,而τ9却可能在t10之前未点火,因此诊断器在w为t1t4t10观测字后提供了一个不确定的解,即故障f1可能已经发生,也可能系统行为无故障。列车运行100次系统行为统计结果(见表4)显示:地铁列车进出站系统行为出现了56次正常,44次故障f1。系统故障确实可能已发生,试验表明:算法诊断结果与实际运行结果一致。
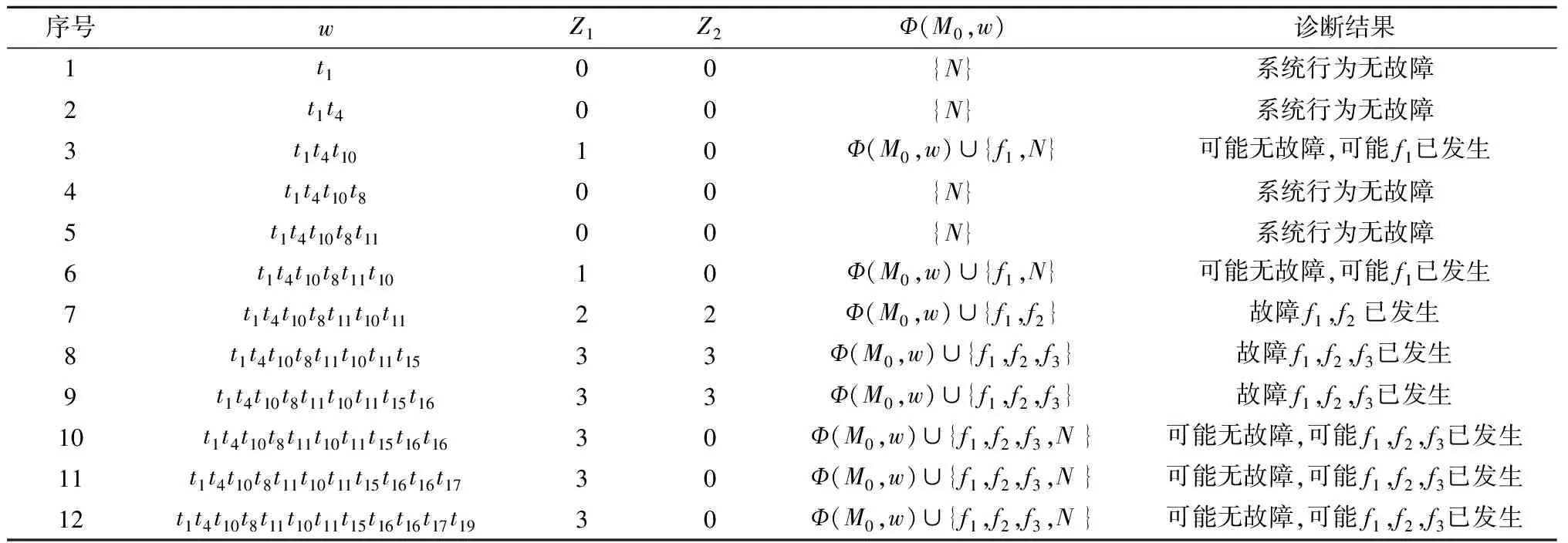
表3 地铁进出站系统Petri网模型ILP故障诊断器算法理论计算结果

表4 地铁列车进出站系统运行100次后系统行为统计结果
另一方面,当w为t1t4t10t8及w为t1t4t10t8t11时,由于在这2个情形中不存在包含与观测器一致的故障变迁τk∈Tf,故其不确定性得到解决。然而当w为t1t4t10t8t11t10t11被观测时,诊断器决断出故障f1及f2均已发生。因这2个提供的最小解释集中包含τ7,τ9,点火序列σ=t1τ2τ3t4τ5t10τ6t8t11τ12t10τ9t11的发生而导致故障f1及f2的发生。地铁列车进出站系统实际运行结果统计显示,系统行为中故障f1与f2分别出现了100次。
当w=t1t4t10t8t11t10t11t15t16被观测时,诊断器诊断结果为故障f1、f2及f3均已发生。这是因为这两个提供的最小解释集中包含不可观变迁τ7,τ9,τ14,故点火序列σ=t1τ2τ3t4τ5t10τ6t8t11τ12t10τ9t11τ14t15t16的发生导致了故障f1、f2及f3的发生。
表4中,地铁列车进出站过程实际运行结果中系统行为无故障次数等于系统实际运行次数时,则表明系统行为无故障,与表3中结果相一致,验证了算法的有效性。表4中系统行为无故障次数小于100,无故障次数与故障次数之和等于100时,系统行为可能无故障也可能故障已发生,其诊断结果不明确,系统故障确实可能已经发生。将表3与表4中对应观测字w运行得到相应的诊断结果相比较,其结果表明:基于不可观变迁Petri网模型及整数线性规划的在线故障诊断算法能有效的运行在地铁列车进出站系统中。
此外,表3的运算结果也表明随着观测字的不同,运算结果也会不同。当观测字w=t1t4t10t8t11t16t17t19时,系统运行结果输出Φ(M0,w)={N},系统行为无故障,相应的点火序列σ可能为t1τ2τ3t4τ5t10τ6t8t11τ13t16t17τ18t19。而当w=t1t4t10t8t11t15t16t17t19时,诊断结果为Φ(M0,w)=Φ(M0,w)∪{f3},故障f3发生,点火序列σ可能为t1τ2τ3t4τ5t10τ6t8t11τ14t15t16t17τ18t19。
3 结语
本文阐述了离散事件系统在Petri网框架下的故障检测问题,采用整数线性规划的方法设置约束条件与目标函数,进而实现对系统行为的故障诊断。算法的使用需要满足假设条件(H1)~(H3),算法输入为初始标识及系统的PN架构,且故障由不可观变迁模型化,算法输出为故障诊断器Φ。
减小故障检测与诊断算法计算量的主要思想是在小于原网PN模型的不可观诱导子网中求解每个ILP。ILP问题的复杂性强烈依赖于变量的数目,因此需要在存储器中存储大量与不同ILP数目相等的不可观诱导子网。诊断器算法公式化的每个ILP问题的解都可以作为LP问题的解来获得,即多项式复杂性。因此,不可观诱导子网与整数线性规划的应用,很大程度上减小了算法运算计算量的复杂性。
随着系统事件序列设置的观测字的不同,诊断器算法运行的故障检测与诊断结果也随之不同。
算法程序观察并存储地铁列车进出站系统事件序列,根据系统事件序列设置观测字w为t1t4t10t8t11t10t11t15t16t16t17t19,随着可观变迁不断被观测,算法在线判断是否系统行为正常或者故障可能已经发生。算法结果与实际结果相比较,充分验证了算法的有效性。该算法为地铁列车进出站系统在线故障检测与诊断提供了良好的思路,可以有效的保证地铁的安全在线运行。
本文提出故障诊断算法在实现系统故障诊断时尚存在一定的缺陷。当诊断器算法诊断结果显示系统故障可能已经发生时(Φ(M0,w)=Φ(M0,w)∪{N}),该算法无法进一步确定系统行为到底是否正常。解决此问题的1个思路可能是采用统计学的知识,对变迁的故障率进行统计,建立贝叶斯故障树并采用贝叶斯推理的方法计算系统行为出现故障的概率,最后采用置信区间的方法来确定系统行为是否出现故障。
[1] BASILE F,CHIACCHIO P,TOMMASI G D.On K-diagnosability of Petri Nets via integer linear programming [J].Automatica,2012,48:2047-2058.
[2] CABASINO M P,GIUA A,SEATZU C.Fault detection for discrete event systems using Petri Nets with unobservable transitions[J].Automatica,2010,46(9):1531-1539.
[3] CABASINO M P,GIUA A,SEATZU C.Diagnosability of discrete-event systems using labeled Petri Nets[J].IEEE Transaction On Automation Science Engineering,2014,11(1):144-153.
[4] CABASINO M P,LAFIRTUNE S,SEATZU C.Optimal sensor selection for ensuring diagnosability in labeled Petri Nets[J].Automatica,2013,49:2373-2383.
[5] CABASINO M P,GIUA A,POCCI M.Discrete event diagnosis using labeled Petri Nets:An application to manufacturing systems[J].Control Engineering Practice,2011,19:989- 1001.
[6] LI L X,HADJICOSTIS C N.Least-Cost transition firing sequence estimation in labeled Petri Nets with unobservable transitions[J].IEEE Transaction on Automation Science and Engineering,2011,8(2):394-403.
[7] DOTOLI M,FANTI M P,MANGINI A M,et al.Identification of the unobservable behavior of industrial automation systems by Petri Nets[J].Control Engineering Practice,2011,19:958-966.
[8] MAHULEA C,SEATZU C,CABASINO M P,et al.Fault diagnosis of discrete event system using continuous Petri Nets[J].IEEE Transaction on Systems Man and Cybernetics Part A-Systems and Humans,2012,42(4):970-984.
[9] CHEN L J,TANG T,ZHAO X Q,et al.Verification of the safety communication protocol in train control system using colored Petri Net [J].Reliability Engineering and System Safety,2012,100:8-18.
[10] DOTOLI M,FANTI M P,MANGINI A M,et al.On-line fault detection in discrete event system by Petri Nets and Integer Linear Programming [J].Automatica,2009,45:2665-2672.
[11] 吴双,何正友,钱澄浩,等.模糊Petri网在高速铁路牵引供电系统故障诊断中的应用[J].电网技术,2011,35(9):79- 85.
[12] BASILE F,CHIACCHIO P,TOMMASI GD.An efficient approach for online diagnosis of discrete event systems[J].IEEE Transaction on Automatic Control,2009,54(4):748- 759.
[13] SKARLATOS D,KARAKASIS K,TROCHIDIS A.Railway wheel fault diagnosis using a fuzzy-logic method[J].Applied Acoustics,2004,65:951-966.
[14] 郑伟.磁悬浮列车跨系统运行Petri网模型[J].交通运输工程学报,2012,12(2):112-118.
[15] 叶阳东,程少芬,王旭,等.基于一种混合Petri网的列车运行系统的建模与分析[J].铁道学报,2009,31(5):42-49.
Online Fault Diagnosis of Partially Observed Petri Net System
PENG Xiaohong, LIU Wenliang, YU Jie, SUN Yan, LIU Wenyuan, LIU Haiyang, BAO Jiancheng, LIU Jiufu
Considering the drawback in the process of fault detection and diagnosis of Petri Net System,such as the enumeration of system states and the consequent state explosion,an online fault diagnosis algorithm based on Petri net model and integer linear programming is proposed.The algorithm takes the Petri net model of subway and its initial markings as the input,the result of diagnoser as the output,some firing sequence is designed and the diagnoser is used to judge whether possible faults have occurred in the system performance,where the faults are modeled by unobservable transitions.Based on practical train leaving and arriving station system,the proposed algorithm can avoid the system state explosion and reduce the computational complexity.Finally,an experiment is taken to verify the effectiveness of the online fault diagnosis on train’s in-and-out process in subway systems.
subway; Petri net; fault diagnosis; unobservable transition; integer linear programming
U231.6; TP206+.3
10.16037/j.1007-869x.2016.12.002
2015-04-13)
