一种改进的十字交叉轨道扣件定位方法
2016-12-30吴禄慎陈华伟史皓良
吴禄慎,万 超,陈华伟,史皓良
(南昌大学机电工程学院,南昌 330031)
一种改进的十字交叉轨道扣件定位方法
吴禄慎,万 超,陈华伟,史皓良
(南昌大学机电工程学院,南昌 330031)
针对传统的十字交叉定位法对轨道扣件区域定位不准确,对图像要求较高,需要特定角度的光照采集才能实现扣件定位,定位过程较慢等问题,提出一种改进的十字交叉定位法对其进行定位。通过对其图像中扣件的初步位置判断定位,然后用中值滤波的图像增强,Canny算子的边缘提取,灰度投影的判断来提高定位准确性,加快定位速率,通过实验表明,改进的定位方法能够很好解决光照采集角度、快速有效的定位和判断出扣件,实现对扣件区域的初定位。
铁路轨道;扣件定位;中值滤波;Canny算子;边缘提取;灰度投影
扣件是轨道中的连接部分,其主要作用是将轨道的钢轨部分和轨枕部分垂直连接,且要保证两者之间不会有任何的移动,确保轨道能够承载列车并稳定而安全高效的运行。因此,其本身的安全也是至关重要的,早期的人工轨道检测方法由于受外界环境影响大,误检率较高已被机器视觉所取代,目前在国内外,主要检测轨道安全的方法是计算机视觉检测以及图像处理[1]。
由于采集到的图片中扣件区域与周围环境区域整体特征相似,传统的十字交叉定位方法[2]不好对其进行定位提取,本文在现有的采集图像[3]和图像处理算法的基础上,提出了改进的十字交叉定位法对扣件进行定位。其基于边缘检测[4]、灰度投影[5]的扣件区域定位与提取,采用Canny算法[6]对图像进行边缘检测,利用图像采集系统的固定位置所采集的图像特点,对图像进行区域划分。
1 扣件区域初步划分定位
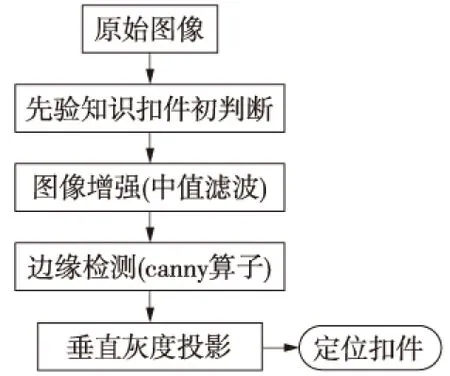
十字交叉定位法其基本思路就是找出十字部分,然后根据十字交叉处的点对所需的地方进行准确定位。对应于扣件定位问题,扣件是在钢轨和轨枕交叉的口上,因此钢轨和轨枕天然的形成了一个十字。其具体原理就是由于钢轨外表面整体是金属,比其他部位光滑,在图像中的表现就是整体灰度值较高,钢轨在图像采集中是竖直的,所以灰度的变化区域应是在水平方向上,即钢轨与周边道砟和轨枕处出现,而在垂直方向,其灰度值是连续的;道砟部分主要由石块构成,而石块的外形不确定性大,其整体灰度值会出现较大变化;轨枕部分则是由水泥组成,整体灰度值相对道砟部分较稳定,依据这个灰度不同的特点,可以在采集的图像中找出钢轨的边缘[7]。同理,可以找到轨枕的边缘。钢轨边缘所构成的竖直的线和轨枕边缘所画出的水平的线正好组成十字,其相互交叉的地方就是扣件所在的区域,就可以根据先验信息确定扣件的大小提取出扣件区域。传统十字交叉扣件定位流程如图1所示。
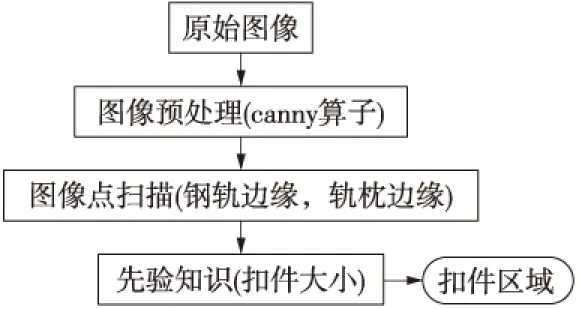
图1 传统十字交叉扣件定位流程
具体步骤如下。
(1)图像预处理:突出图像中的一些灰度变化以及图像中各部分的边缘部分,选用边缘检测算法对其边缘处理。
(2)图像点扫描[8]:将经过上一步骤的图像进行全图的点扫描,首先确定钢轨部分,从左边开始水平扫描,计算出区域内灰度值较高的点的范围,然后做出水平方向的灰度投影图,找出区域内灰度值最高的点,选定其为钢轨的左边界;同理,找出钢轨的右边界,以及确定轨枕的位置。
(3)确定了十字的两条线后,找出其交叉处,根据扣件部分的大小确定扣件区域。
由于实验图像采集系统是固定放置在轨道上,其所有部件都是固定的,在图像采集过程中,随着采集系统在轨道上移动,钢轨部分的相对位置是连续的,不变的,但由于移动时会有一定程度的振动,使得采集到的图像中会出现一点偏移,因此无法通过固定的数值来实现钢轨部分的准确定位。
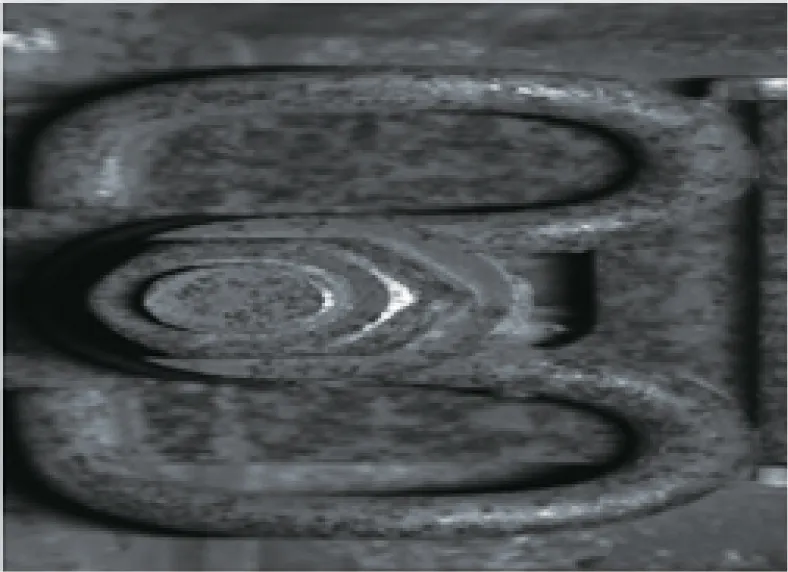
而实验室图像采集系统采集图像分辨率是2 048×1 024,如图2所示。
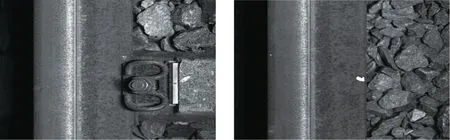
图2 采集的原始图像
由于图像中道砟石整体灰度与轨枕灰度相当,无法通过传统的轨枕灰度级不同来对轨枕进行定位,从而无法实现对传统的钢轨与轨枕的十字交叉定位。
由于采集的图像主要由4部分组成:钢轨、扣件、轨枕、道砟。其中钢轨和道砟是一定存在的部分,而扣件和轨枕部分则随着采集系统的移动可能没有。因此如果直接在原图上提取扣件部位,整体的工作量比较大,而且比较容易出现误判,相对效果不会太好。所以应该对扣件部分进行定位,将扣件部分从原始图像中截取出其所在的位置,缩小后续处理范围,减少后续工作量。由于实验的图像采集系统相对于轨道的位置是固定的,因此所拍摄的图像中各部分的位置都是相对固定的,根据这一特性,可以对图像进行一个区域预选取定位。
根据图像所显示的先验信息,可知扣件所在的区域其水平范围在1 170~1 620像素之间,因此,首先对图像在水平1 170~1 620像素之间的范围进行截取,得到扣件的初步区域,其截图如图3所示。
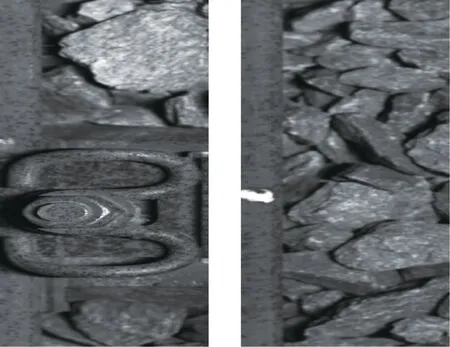
图3 水平区域截取图像
由图3可知,扣件的水平区域已被初步定位截取,整体无大偏差,截取后的图像在水平方向已定位完成,后续处理只需对其竖直方向进行定位,因此工作量已减少,后续检测速度有明显提高。
2 基于中值滤波的图像增强处理
图像增强[9]是一种简单实用的数字图像处理技术,其主要的目的就是消除图像中的噪声,将所需要的特征部分凸显出来,将图像中不需要的信息进行削弱甚至除去,最终使图像达到能够更好地检测识别的效果。
本文采用的是中值滤波[10]对图像进行增强,中值滤波是一种空间域的图像增强方法,其同其他的空间域图像增强方法一样是采用滤波器来处理图像,相对于其他的空间域图像增强方法,中值滤波能够很好地保留边缘的信息。与线性平滑滤波需要所有的邻域像素信息不同,中值滤波是非线性的平滑滤波,它在每个n×n邻域内都会去掉相较于平均像素值偏差较大的像素值,即灰度值相差过大的邻域点,并且所占区域小于像素总数一半的那些像素的影响,而实际上满足这样条件被忽略掉的像素往往就是噪声。经过滤波后所输出的像素值是为滤波器中所包含的所有像素值的中值。中值滤波器的最大特点就是对于图像中所存在的灰度异常值不够敏感,而均值滤波器则不一样,其会考虑周围邻域内所有像素点的信息,然后得出均值。因此,中值滤波算法在对那些噪声进行消除的前提下,还能够很好地展现出图像的边缘细节和图像的一些特征。
在原图像中某点(i,j)上使用中值滤波,其具体方法是以该点为中心,以设定的滤波器为范围的邻域内像素的中值为(i,j)点的响应值即输出值。
中值的定义是对所列出的数字进行一定顺序的排列,其位于排列中间的值就是中值。例如:采用3×3的中值滤波器,在中心点(i,j)的周围的像素值分别是:12,18,18,11,23,22,13,25,118,按递增的排序结果为:11,12,13,18,18,22,23,25,118。在第5位上的18即作为(i,j)点中值滤波的响应g(i,j)进行输出。
本文中所采用的中值滤波器是3×3型,其效果如图4所示。

图4 中值滤波后增强图像
3 基于Canny算子的边缘提取
边缘信息作为图像的几个最基本特征之一,边缘点的定义是图像中与周围像素灰度相比有着跳跃式的变动的那些像素点。边缘检测是图像处理和计算机视觉中的常用的方法,因为它能够大幅度地减少后续所需处理的数据,较为准确的保留下图像中一些重要的结构信息。其常用的边缘检测算子有:(1)梯度算子;(2)高斯-拉普拉斯算子;(3)Canny算子[11]。其中Canny算子在前期处理中加入了平滑滤波处理,在定位方面有着最好的效果。因此本文选用Canny算子对图像进行边缘检测。
Canny边缘检测算子,其相对于其他检测算子的主要特点就是首先会对图像进行一个平滑处理,所选用的是空间域中的高斯平滑,这样会使图像边缘部分由一定程度的凸显,便于后续的检测处理。
Canny检测的3个判断准则如下。
(1)信噪比准则,即要达到最好的检测效果,最大限度地提高图像的真实边缘检测率,将边缘检测的误检率降到最低,剔除图像中的伪边缘。而信噪比的定义就是信号与噪声的比例,其所输出的数值越大,则代表信号所占比例大,噪声部分比例小,误检率相对就会低,其英文用SNR表示
式中,f(x)是边界为[-ω,+ω]有限滤波器的脉冲响应;G(x)代表边缘;n0是高斯噪声的均方根。
(2)定位精度准则:在检测时所测出来的边缘应该要尽可能的是图像中的真实边缘,用数学语言表达就是尽量使式中的Loc达到最大。
式中,G′(-x),f(x)分别为G(-x),f(x)的一阶导数。
(3)单边缘准则:在检测时对同一边缘应尽可能少的重复检测,最好能做到只检测一次。而检测出的边缘的极大值之间的平均距离为
式中,k为指数函数的个数;w为边缘宽度。
因此在2W的宽度内,极大值的数目为
可以看出,N值与k值相关,只要将k值的大小确定,就确定了N值。
Canny边缘检测的整体思路:第一步对图像进行增强处理,采用合适的Gauss滤波器,第二部采用非极抑制技术对图像进行边缘轮廓的采集和连续。其步骤如下。
(1)用高斯滤波器平滑图像。
这里,利用一个省略系数的高斯函数H(x,y)
式中,f(x,y)为图像数据。
(2)用一阶偏导的有限差分来计算梯度的幅值和方向。
利用一阶差分卷积模板
得到幅值
方向
(3)对上述结果进行非极大值抑制。
虽然得到了所需的梯度值,但这些还是不能够将边缘确定。因此需将局部的最大梯度值的点进行保留,然后对非极大值进行抑制,即将非局部极大值点置零以得到细化的边缘。
(4)用双阈值算法检测和连接边缘。
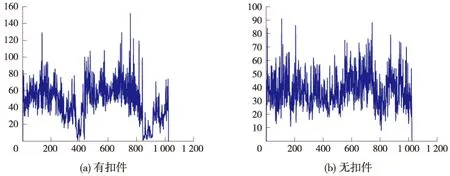
使用两个阈值T1和T2(T1 使用Canny边缘检测算子的实验结果如图5所示。 图5 Canny边缘提取图像 投影分析法[12]的整体思路是把图像分到一个空间坐标系中,将其中的像素在X、Y坐标轴做灰度值投影,统计出在所有X、Y点上的数值大小,并以线性图的方式显示。设f(x,y)是像素点(x,y)的灰度值,则该像素点的灰度值在X方向和Y方向上的投影为 在图像中由于光照和结构原因会出现部分区域偏暗,像素点的灰度值小,反映到投影的图表上的就是投影数值小,甚至有些能够到达零值,在投影图像中的其分布曲线上会出现较为明显的下降,表现为出现局部谷值或到达底部。通过这一特点,可以设定一个阈值线[13],如果有两个点低于这个阈值线的中间距离则可判断为扣件区域,如果只有一个点低于阈值线则判断为有部分扣件区域在图像中,如果没有点低于阈值线则可判断为图像中无扣件区域。 由于在第一步的时候,已经把图像中扣件的水平区域给定出了,因此在这步中只需要找出其竖直方向,也就是上下区域即可。 经过Canny算子检测后的图像可以很明显地看出在截取后的图像中,扣件上下一定范围的水平区域内,其灰度值很低,接近于0值[14]。这是因为在扣件上下区域是轨枕区域,而由于轨道检测系统的结构设计,光照部件是垂直于整个轨道表面,因此光线无法照射到轨枕上下的边缘处,使得轨枕上下边缘的灰度值偏低,比较符合投影分析法的所需的条件。根据这一特性,可以对图像进行水平方向上的灰度值投影,从而确定扣件的上下部分的具体位置。在投影的过程中,会将同一Y轴上所有水平位置的点投影到一条直线上,根据该直线所呈现出的高度差变化来判断结果。如图6所示。 其中X轴代表是图像的水平位置分为0到1 024,Y轴代表是灰度值总数。 图6 灰度垂直投影分布 在截取的图像中有扣件时,其上下区域有很明显的灰度变化,如图6(a)所示,在384~716像素之间,而无扣件的图6(b)则整体无灰度值的明显变化,整体均匀的分布在20~60之间,因此可以很明确地检测出是否存在扣件,如存在扣件则可以根据其灰度分布确定其位置。 将上述方法在Matlab软件中进行实现,为了检验实验效果和验证上述方法,对采集的多张图像进行实验检测。本实验采用的硬件设备是处理器为intel i5-4210 m的笔记本电脑,将图库中的50张图像通过改进的十字交叉方法定位检测,其中共23张有完整扣件,15张部分扣件,12张无扣件,最后均检测成功。整体实验流程如图7所示。 图7 改进后十字交叉定位实验流程 通过检测后其所截取的区域范围在存在扣件的图像中实验结果如图8、图9所示。 图8 有扣件的图像定位效果 图9 无扣件的图像定位效果 通过截取的图像很明显反映出扣件区域已完全截取出,无遗漏。因此通过实验检测证实此方法效果理想,能够基本定位出扣件区域。 本文针对实验室图像采集系统的特点,提出了一种利用采集图像特征进行轨道扣件初步定位的改进方法。提出了利用图像位置固定的特点提取出扣件所在的水平位置,然后对截取的图像进行预处理和边缘检测,最后利用水平灰度投影提取扣件区域。通过对多组图像检测的实验表明, 改进的定位方法能够很好地判断是否有扣件,在存在扣件的时候能够定位出扣件的初步位置, 定位精度能够满足后续对扣件的处理。 (1)传统十字交叉法定位扣件利用钢轨和轨枕相对明显的灰度变化来定位,但本文中的图像由于轨枕与道砟的灰度值无明显区别,所以不适合本文中的图像,而改进的十字交叉定位法能够很好地解决这个问题。 (2)改进的十字交叉定位法可以很好地利用图像的特点,首先截取部分图像从而减少运算量,加快运算速度,然后采用中值滤波对截取的图像进行增强处理,最后实现扣件区域定位。通过实验表明该方法可以很好地提升检测的准确性,降低误检率。 [1] 吴芳.全视觉高速铁路扣件缺失系统软件设计及算法研究[D].上海:上海交通大学,2013. [2] 范宏.基于图像的铁路扣件缺陷检测算法研究[D].成都:西南交通大学,2012. [3] 吴禄慎,朱磊,陈华伟.基于线阵CCD相机的轨道图像采集系统设计[J].铁道标准设计,2014(8):55-59. [4] 杨樊,陈建政,吴梦.一种基于计算机视觉的铁轨扣件缺失检测方法[J].电脑知识与技术,2014(10):2367-2670. [5] 谭伟.基于图像的铁轨缺陷检测系统的算法研究及软件设计[D].大连:大连海事大学,2004. [6] Canny J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986 (6):679-698. [7] 董洋.基于图像处理的光照不均铁路扣件状态检测[D].成都:西南交通大学,2014. [8] 王凌,张冰,陈锡爱.基于计算机视觉的钢轨扣件螺母缺失检测系统[J].计算机工程与设计,2011,32(12):4147-4150. [9] 杭元元.基于计算机视觉的铁路扣件检测算法研究[D].成都:西南交通大学,2014. [10]田流芳.基于中值滤波和小波变换的图像去噪算法研究[D].保定:河北大学,2014. [11]王淑青,姚伟,陈进,等.基于直方图均衡化与形态学处理的边缘检测[J].计算机应用与软件,2016(3):193-196. [12]张永亮.基于DSP的人脸检测和定位算法研究[D].太原:太原科技大学,2008. [13]钱广春.基于计算机视觉的铁路扣件缺失快速探测方法研究[D].上海:上海交通大学,2011. [14]马姗.铁路扣件识别的研究[D].北京:北京交通大学,2013. An Improved Cross Rail Fastener Positioning Method WU Lu-shen, WAN Chao, CHEN Hua-wei, SHI Hao-liang (School of Mechanical & Electrical Engineering, Nanchang University, Nanchang 330031, China) The traditional cross positioning method fails to locate fastener area accurately, and it needs high quality images and illumination collection at specific angle to fulfill fastener positioning, which results in slow positioning. To solve the problem, an improved cross positioning method is proposed. Positioning is verified based on the initial location of the fastener reflected in the image and then it uses the median filtering enhanced image, the Canny edge processing and the gray-level projection to improve positioning accuracy and speed up the positioning rate. The test results show that the improved method can do well for illumination collection angle, fulfill quick positioning and fastener identification and conduct initial positioning in the fastener area. Rail track; Fastener positioning; Median filtering; Canny operator; Edge extraction; Gray-level projection 2016-04-19; 2016-04-28 国家自然科学基金项目(51365037) 吴禄慎(1953—),男,教授,博士生导师,1990年毕业于清华大学,工学硕士,主要从事虚拟现实、三维光学图像测量与逆向工程的研究,E-mail:wulushen@163.com。 1004-2954(2016)12-0049-05 TP391.41 A 10.13238/j.issn.1004-2954.2016.12.012
4 垂直投影定位扣件区域
5 实验结果与分析

6 结论
