基于模糊神经网络的移动机器人避障研究
2016-12-26沈阳理工大学自动化与电气工程学院中国科学院沈阳自动化研究所机器人学国家重点实验室杨小菊中国科学院沈阳自动化研究所机器人学国家重点实验室伟沈阳理工大学自动化与电气工程学院高宏伟米海山
沈阳理工大学自动化与电气工程学院 中国科学院沈阳自动化研究所机器人学国家重点实验室 杨小菊中国科学院沈阳自动化研究所机器人学国家重点实验室 张 伟沈阳理工大学自动化与电气工程学院 高宏伟 米海山
基于模糊神经网络的移动机器人避障研究
沈阳理工大学自动化与电气工程学院 中国科学院沈阳自动化研究所机器人学国家重点实验室 杨小菊
中国科学院沈阳自动化研究所机器人学国家重点实验室 张 伟
沈阳理工大学自动化与电气工程学院 高宏伟 米海山
移动机器人在复杂环境自主运行就必须具有较高的智能性。模糊神经网络技术结合了模糊逻辑与神经网络的优点,充分发挥模糊控制的推理及神经网络的学习机制以增强机器人系统的智能性。本文采用超声波红外以及电子罗盘传感器采集未知环境的信息,通过模糊神经网络信息融合实现机器人的自主避障。经过仿真实验验证了该方法的有效性。
模糊神经网络;信息融合;移动机器人;避障
引言
移动机器人是通过传感器感知环境和自身位姿,在复杂环境自主决策,完成预期任务的机器人系统[1]。
避障不仅是移动机器执行其他任务的前提与保障也是其智能化的重要标志。传感器是增强移动机器人智能性的途径,传感器信息融合技术就发挥人大脑的作用,协调各个传感器信息,充分利用多传感器资源,以一定的优化准则进行分析、评估与决策[2]。随着国内外学者对避障技术的重视,不断提出多种避障融合算法,例如模糊控制、人工势场发、神经网络等。每一种算法都有其独有的特点,然而也具有局限性和适用性。
模糊控制模拟人的思维,对环境信息进行综合分析,通过模糊理论总结出模糊控制规则。但模糊控制没有自学习与自适应能力,并且要求设计者充分了解被控系统的物理特性,预定义有效的被控规则[3]。随着系统不断趋于复杂,模糊控制规则不但具有主观性而且难于全面设计。人工神经网络具有学习机制,从传感器采集的输入输出数据进行学习、训练,以增强系统的容错性[4]。然而神经网络不适于表示规则也难于确定网络的初始值,增加训练时间。因此将模糊控制与神经网络相结合,将模糊系统构造神经网络结构,通过神经网络的训练以提高系统的自适应性。
1.移动机器人实验平台
为使移动机器人安全、自主避开障碍物,首先,传感器的布局必须合理,本系统的传感器布局如图1所示,采用超声波及红外传感器获取机器人左、前、右的障碍物距离信息,电子罗盘采集目标位置的方位信息。
将图2 中的1号与2号超声波的最小距离作为机器人左方障碍物信息,3号与4号超声波最小距离为前方障碍物信息,5号与6号超声波最小距离作为组右方距离信息。在超声波的测量盲区以红外传感器为补充。
移动机器人的周围环境分布杂乱,按照机器人的运行环境可以整理8中情形,如图2所示。其中红色小球表示障碍物,机器人周围的虚线表示传感器测距范围。
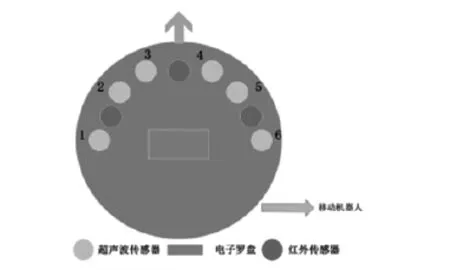
图1 传感器的布局系统图

图2 障碍物的环境分类
移动机器人避障的决策与环境中障碍物的分布密切相关。将机器人本体正前方划分为左、前与右三个目标方向,帮助机器人理解环境以作出避障决策。图3为目标方向分区图。
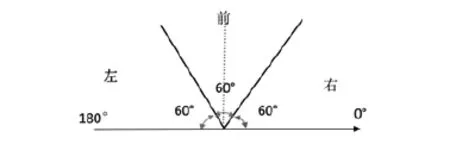
图3 目标方向
为使移动机器人自主达目标位置。首先对超声波与红外传感器获取的环境信息分组预处理,然后和电子罗盘获取的目标角度信息送入模糊神经网络控制器,融合出机器人周围的环境信息。然后控制器发出控制决策指导机器人实时动作。完成避障任务。移动机器人避障控制结构如图4所示:
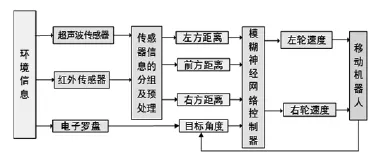
图4 移动机器人避障的模糊神经网络控制结构
2.模糊神经网络
Takagi-Sugeno 模型的模糊神经网络具有局部逼近的功能,不仅具有模糊推理的能力而且也有神经网络自学习的特性[5]。根据 T-S 模糊标准模型,可以构造如图5的多输入多输出模糊神经网络结构图。
模糊神经网络的各层的节点函数如下:

由于本文的初始隶属度采用标准型函数而与实际环境有所差别,因此要对采集的不同环境信息进行学习。为保证机器人的实时性,选择离散训练方式对初始网络进行修正。并将改善后的结果存储与表格中,移动机器人在实际环境已查表的形式进行决策。离散训练如图6所示。
结合机器人的运行环境与避障特性,将输入障碍物距离以及目标方向的模糊分割数定为3 ,即{"N","M","F"}={"近", "中","远"},对应的论域[0~2m]。{"L"、"F"、"R"}= {"左","前","右"},对应的论域为[0,180°]。
依据机器人所处的环境的情形,构造机器人的训练样本与测试样本。利用模糊工具箱将训练集生产初始网络系统,采用误差反向传播以及最小二乘法进行离散训练。依据设定的控制参数作为终止离散训练条件。整个系统的框图如图7所示。

图5 模糊神经网络结构图
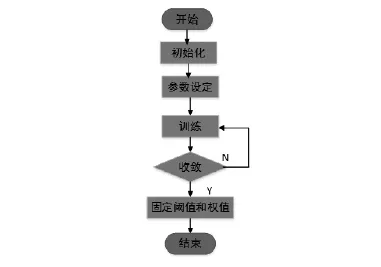
图6 模糊神经网络训练
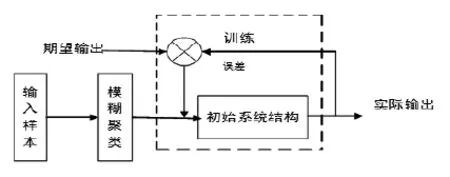
图7 模糊神经网络系统结构
3.模糊神经网络避障结果
通过不断调整网络参数,将学习步长设定为0.01,通过58步训练,误差稳定在设定值的范围内。图8为训练的均方差变化曲线。
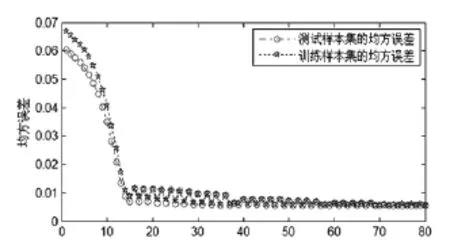
图8 训练的均方误差变化曲线
为了验证训练后的模糊神经网络与移动机器人避障模型是否一致,构造30组测试样本对网络进行检测,检验效果如图9所示。

图9 训练检测结果

图10 模糊神经网络的避障仿真
图9 中横坐标表示为30组测试样本序列,纵坐标表示为机器人的左右速度。检测数据以蓝色"+"表示,网络输出以红色"*"表示。已从检验效果可以看出,训练后的模糊神经网络很好地捕着到机器人避障模型,表明模糊神经网络融合融合了传感器采集的数据,实现机器人的避障功能。
在Matlab环境中设定初始位置为(0,0),并以菱形表示。目标位置(10,10),以三角形表示。环境中的障碍物以红色小圆圈及正方形表示。移动机器人的避障轨迹蓝色小点表示,避障的仿真如图10所示。
4.结论
从移动机器人的避障结果可以看出模糊神经网络能有效地融合超声波、红外传感器以及电子罗盘的数据,使机器人在外界环境自主避障,验证了模糊控制与神经网络结合的有效性。
由于外界环境的未知性以及机器人避障模型的非线性因素,要提高机器人的避障精度,传感器的配置以及融合算法的改进经将是进一步深入研究的重点。
[1]倪小雷,卜佳俊。自主移动机器人混合式体系结构的设计与实现[J]。计算机测量与控制,2006,14(11):1526-1528.
[2]潘泉,于昕,程咏梅,张洪才。信息融合理论的基本方法与进展[J]。自动化学报,2004,29(4):599-615
[3]李国勇。智能控制及其MATLAB实现[M]。北京:电子工业出版社,2005.261-280.
[4]杨娟,孙华,吴林。模糊神经网络信息融合方法在机器人避障中的应用[J]。控制理论与应用,20052,4(2):22-24.
[5]孙增坼,徐红兵。基于T-S模型的模糊神经网络[J]。清华大学学报(自然科学版),1997,37(3):18-26.
杨小菊(1989-),女,陕西汉中人,硕士研究生学历,主要研究方向为移动机器人的多传感器信息融合方法。
张伟
工业机器人机构设计与性能分析研究,项目编号:2013020054.
