车载激光扫描仪外参数标定方法设计与实现
2016-12-26姚连璧汪志飞孙海丽同济大学测绘与地理信息学院上海200092
姚连璧,汪志飞,孙海丽(同济大学测绘与地理信息学院,上海200092)
车载激光扫描仪外参数标定方法设计与实现
姚连璧,汪志飞,孙海丽
(同济大学测绘与地理信息学院,上海200092)
提出了车载移动测量系统中激光扫描仪位置和姿态的标定方法.首先,定义了车载坐标系与激光扫描仪坐标系,将扫描仪的标定简化为2个坐标系转换参数的求取.然后,利用标准靶球球心和扫描仪特征点作为公共点,借助全站仪建立的临时水平坐标系的测量结果计算得到车载坐标系与扫描仪坐标系的转换参数.最后,通过多次试验分析了该方法的重复精度,而且在逸仙高架路上的实际车载数据采集和处理也验证了该方法的可行性.
车载移动测量系统;激光扫描仪;标定;坐标转换;圆拟合
车载移动测量系统集成了激光扫描仪、全球导航卫星系统(GNSS)、惯性测量单元(IMU)及全景相机等多种传感器,是一种快速、高效且无地面控制的测绘技术[1].系统工作时,需要通过GNSS和IMU集成来计算扫描仪的中心位置和姿态,这就必须事先确定扫描仪中心与GNSS天线中心的位置关系、扫描仪与IMU的姿态关系,即扫描仪的标定.
该系统采用的是断面激光扫描仪,与一般的三维激光扫描仪不同,其采集的是扫描面中的二维数据,而且扫描线是不可见的,这给标定带来了不小的难度.目前,基于断面扫描仪标定的研究并不多.康永伟等[2]利用光电元器件来寻找扫过的点并将其作为公共点,虽然这样处理也能达到目的,但是实现过程还是过于复杂,而且其提出的试验场搭建比较困难.杨长强[3]提出了基于同名线段对应的扫描仪间接标定方法,利用系统中的相机来标定扫描仪与相机之间的位置关系,借助相机来完成标定,但是需要制作很多模型,同时解算方法也很复杂.另外,他还提出了基于同名点对应的扫描仪直接标定方法,利用平面相交方法寻找扫描仪和全站仪的公共点,但所采用的平面相交算法过于复杂,难以实现.基于此,本文结合实际需求,提出了一种更简单易行的扫描仪标定方法.
1 车载移动测量系统的坐标系及其相互关系
1.1 车载移动测量系统
本文提出的车载移动测量系统配置了3台激光扫描仪:1台安装在车尾部分,专门提取路面信息;另外2台安装在车顶平台的两侧,用于车尾扫描仪的补充.GNSS用于实时确定扫描仪的位置信息,IMU用于实时确定扫描仪的姿态信息,里程计用于记录车轮转过的角度,全景相机用于实时采集系统周围的影像信息.
1.2 车载坐标系定义
车载坐标系定义如图1所示.图1中,1、2、3分别代表扫描仪编号,C1~C6代表车顶特征点.
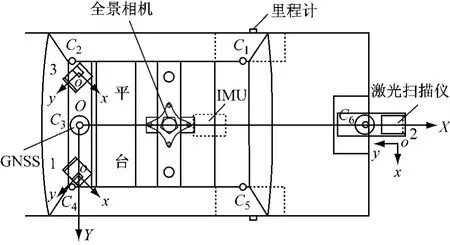
图1 车载坐标系Fig.1 Coordinate system of vehicle
原点位于前GNSS天线与车顶平台交点处,X轴与前后GNSS天线连线在平台上的投影重合指向车尾,Z轴垂直系统平台朝上,Y轴垂直于XOZ平面,构成左手系.
1.3 扫描仪坐标系定义
该系统采用SICK LMS511系列扫描仪,其坐标系定义如图2所示.

图2 扫描仪坐标系(单位:mm)Fig.2 Coordinate system of scanner(unit:mm)
原点位于激光源点处,y轴指向激光扫描仪顶端,x轴与y轴垂直,x轴垂直于xoy平面指向激光扫描仪扫描平面正后方,构成左手系.
1.4 坐标系的相互关系
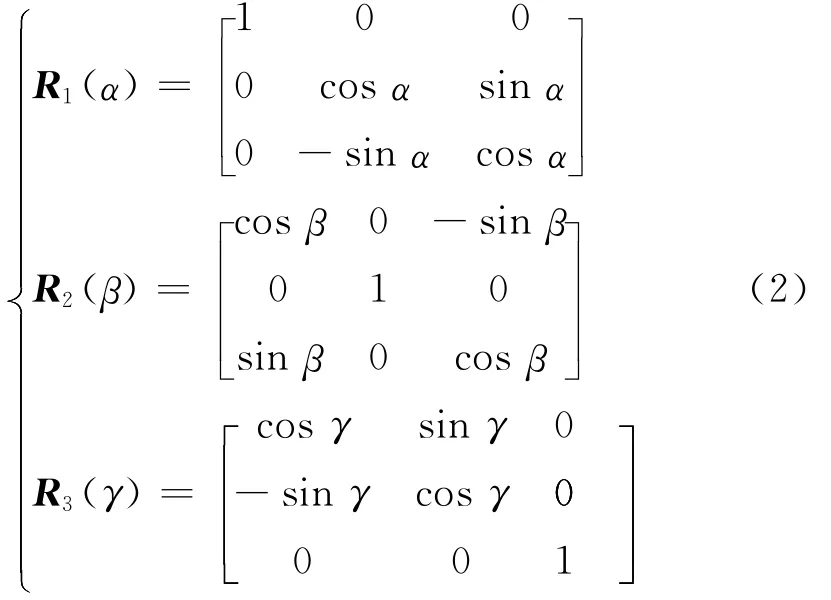
该系统中,扫描仪的标定工作就是确定车载坐标系与扫描仪坐标系之间的相互关系,即3个平移参数和3个旋转参数,尺度变换参数取1.在标定过程中,坐标转换是必不可少的一个步骤,坐标转换模型如下:

式中:(x0,y0,z0)T为两坐标系之间的平移量;R=R3(γ)R2(β)R1(α)为3个旋转矩阵的乘积,分别绕x轴旋转α,绕y轴旋转β,绕z轴旋转γ.o-x′my′mz′m为起始坐标系,o-xmymzm为目标坐标系[4],旋转角顺时针为正,逆时针为负.其中,
2 扫描仪标定的原理、方法与实现
2.1 标定的原理
扫描仪标定原理主要是通过扫描仪和全站仪测量公共点、全站仪观测车顶平台特征点来反算转换参数,具体过程如图3所示.
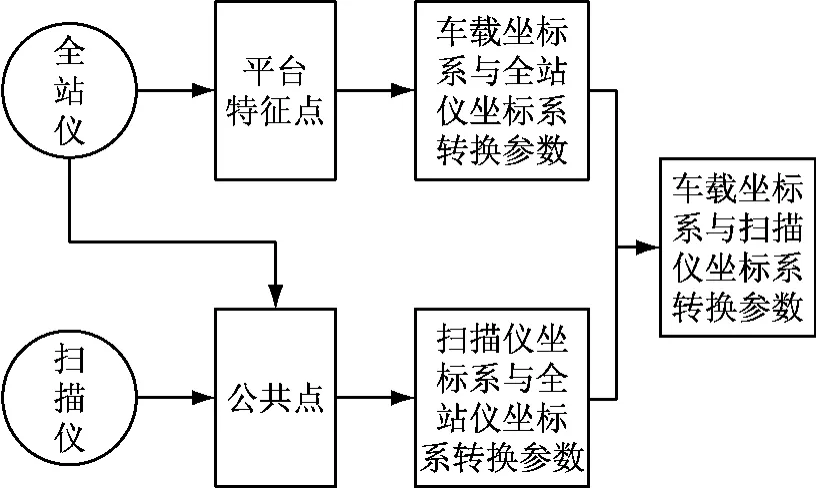
图3 扫描仪标定原理Fig.3 Principle of scanner’s calibration
标定过程分为两部分,即得到车载坐标系与全站仪坐标系之间的转换参数、扫描仪与全站仪坐标系之间的转换参数.对于前者,只需要测量系统平台6个特征点就能确定;对于后者,要想确定6个转换参数,至少需要3个公共点.由于扫描仪的扫描光束是不可见的,因此如何确定扫描仪与全站仪的公共点是解决问题的关键.这里提出一种可行的方案,即利用标准靶球(半径为0.075m)球心以及扫描仪上的特征点作为公共点.
2.2 公共点的布设
求取扫描仪坐标系与全站仪坐标系之间的转换参数,至少需要3个公共点.扫描仪的特征点可以用作公共点,其位于扫描仪坐标系y轴与扫描仪底部交点,需要提前找出并标记,如图2所示.根据扫描仪的规格参数,可知特征点在扫描仪坐标系中的坐标为(0,-0.063m,0).除去扫描仪特征点,至少还需要2个公共点,这里利用标准靶球来确定.对于其他型号的断面扫描仪,一般都能够根据扫描仪的规格参数确定1个特征点的坐标,如果缺少相应的参数导致特征点无法确定,则需要利用3个以上靶球来确定公共点.通过扫描仪扫描靶球的数据间接求出靶球球心在扫描仪坐标系中的三维坐标,具体做法是:利用扫描仪扫描靶球得到的坐标数据进行圆拟合,再计算出球心在扫描仪坐标系中的三维坐标,原理如图4所示.
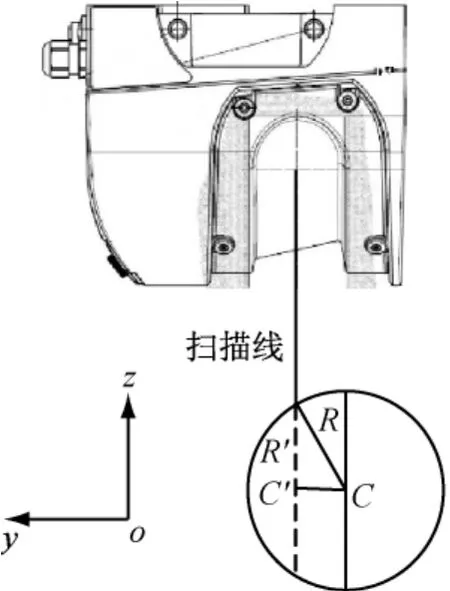
图4 公共点的确定Fig.4 Calculation of common point’s coordinate
图4中,虚线就是扫描仪扫过靶球拟合出的圆的直径,C′和R′为拟合圆的圆心和半径,C′的坐标为(xC′,0,zC′),C和R为半球体的球心和半径.通过下式可求出2个圆心之间的距离:
则C在扫描仪坐标系中的三维坐标为(xC′,-SCC′,zC′).如果扫描仪扫过靶球的另半边,则C在扫描仪坐标系中的三维坐标为(xC′,SCC′,zC′).通过上述方法选出2个以上位置放置靶球就能确定出2个以上的公共点.
本文以车尾2号扫描仪的标定为例,采用4个公共点,也就是需要布设3个标准靶球.将车停在较平坦的试验场中,从同一方向放置并移动靶球,直到扫描仪可视化程序显示扫描仪已经扫描到靶球为止,尽量保证扫描平面不要越过靶球直径面.摆放好3个靶球后,选择合适的位置架设全站仪以观测特征点和公共点在全站仪坐标系下的坐标.
2.3 标定参数求解
首先,求取车载坐标系与全站仪坐标系之间的转换参数,其中全站仪坐标系为水平的左手系.如图1所示,车顶平台4个特征点C1、C2、C4、C5分布于平台的4个角,根据这4个点可以计算车载坐标系与全站仪坐标系之间的橫倾角αTC和纵倾角βTC,另外2个特征点C3、C6为前后GNSS天线,可以计算出车载坐标系需要绕Z轴旋转的角度γTC.
参考式(1),可分别得到车载坐标系与全站仪坐标系、扫描仪坐标系与全站仪坐标系转换公式,如下所示:
联立两式,可得
式中:(XC,YC,ZC)T为车载坐标系下坐标;(XS,YS,ZS)T为扫描仪坐标系下坐标;(XT,YT,ZT)T为全站仪坐标系下坐标;(XTC,YTC,ZTC)T、RTC分别为车载坐标系与全站仪坐标系的平移参数和旋转矩阵;(XTS,YTS,ZTS)T、RTS分别为扫描仪坐标系与全站仪坐标系的平移参数和旋转矩阵.
计算出标定参数中的平移参数R0,计算旋转矩阵RCS并反求出标定参数中的旋转参数.其中,
2.4 数据采集
通过扫描仪可视化程序观察靶球位置是否合适,如果不需要调整,利用编写好的程序进行扫描仪数据采集.
特征点直接用全站仪进行测量,全站仪测量靶球球心坐标采用这样一种方法[5]:在水平方向瞄准靶球左右边缘,测出方向值A1和A2,取平均;在垂直方向瞄准靶球上下边缘,测出天顶距U1和U2,取平均;根据2个方向的平均值可以确定靶球的表面中心,此时可以测出测站到靶球表面中心的距离S′,而标准靶球半径r0已知,记录此时方向值和天顶距观测值A和U,则靶球球心在全站仪坐标系中的坐标根据以下公式可以求出:
3 试验结果与实例验证
全站仪直接观测系统平台特征点,特征点坐标如表1所示.全站仪第1站观测值(C1~C3)保留3位小数,全站仪其余站转换值(C4~C6)保留4位小数.
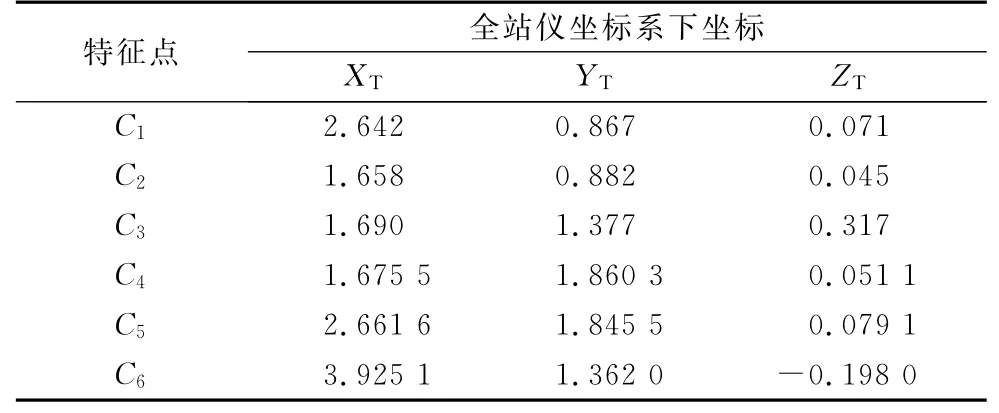
表1 全站仪观测车顶平台特征点坐标Tab.1 Coordinate of vehicle feature points in total station system m
利用表1中6个特征点计算出车载坐标系与全站仪坐标系之间的转换参数,如表2所示.

表2 车载坐标系转全站仪坐标系参数Tab.2 Transformation parameters from vehicle system to total station system
将扫描仪采集的数据按照定义的坐标系进行解码,筛选出3个圆弧的数据,分别进行圆拟合(见图5),求出3个靶球球心在扫描仪坐标系中的坐标.
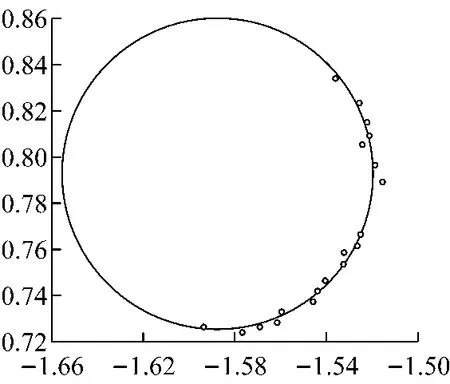
图5 圆拟合Fig.5 Circle fitting
最终4个公共点在扫描仪和全站仪坐标系中的坐标如表3所示.

表3 公共点在扫描仪和全站仪坐标系中坐标Tab.3 Coordinate of common points in scanner system and total station system
求出扫描仪坐标系与全站仪坐标系之间的转换参数,如表4所示.
表4 扫描仪坐标系转全站仪坐标系参数Tab.4 Transformation parameters from scanner system tototal station system

表4 扫描仪坐标系转全站仪坐标系参数Tab.4 Transformation parameters from scanner system tototal station system
注:αTS、βTS、γTS为旋转角.
_XTS/m__ __YTS/m__ __ZTS/m__ αTS/(°)_βTS/(°) γTS/(°)4.204 7_1.363 8-0.614 5 0.001 4_0.892 4__269.259__ _8
利用数据预处理的结果解算出扫描仪坐标系与车载坐标系转换参数,如表5所示.

表5 扫描仪坐标系转车载坐标系参数Tab.5 Transformation parameters from scanner system to vehicle system
由于很难实际量测出扫描仪在车载坐标系中的准确位置,所以根据经验值来判断解算的结果是否正确.经验值范围如表6所示.如果符合经验值,则可以进一步判断结果的精度;如果不符合,则只能重新进行标定工作.由表6所给出的经验值范围可以判断表5中的转换参数是符合经验值的,其精度需要进一步分析.

表6 扫描仪坐标系转车载坐标系参数经验值范围Tab.6_Empirical value of transformation parameters from scanner’s system to vehicle system
标定过程中难以计算各误差源带来的精度影响,所以标定参数的绝对精度难以量化.这里采用相对精度来分析标定参数:移动汽车和靶球后,重复标定试验,将解算后的标定参数与表5中参数比较.
本文另外进行了2次标定试验,解算的转换参数结果如表7所示.

表7 另外2次标定结果Tab.7_Other two calibration results
将表7与表5对应数据作差对比,结果如表8所示.

表8 另外2次标定结果与第1次标定结果比较Tab.8 Comparison of other two calibration results with the 1st calibration results
从表8中数据可以看出,后2次试验的结果与第1次比较平移参数最大差距为-7.100 0mm,旋转参数的差距在1°以内.考虑到标定过程中各种误差累积的影响,说明本文提出的标定方案相对精度比较高,并且具有非常好的重复性.在实际使用中,取上述3次试验结果的平均值,并且计算6个参数的中误差,如表9所示.
当然,该标定方案还有不足之处,主要体现在无法直接提供标定的绝对精度,需要进行多次标定来相互比较,这在实际使用中略显繁琐.
利用此方法完成了系统中另外2个扫描仪的标定工作,3个扫描仪标定参数如表10所示.

表9 3次试验中转换参数中误差Tab.9 Mean square errors of transformation parameters in three experiments

表10 3个扫描仪标定参数Tab.10_External parameters of three scanners
图1中定义了1号和3号扫描仪的坐标系,由于z轴垂直朝上,所以γCS的数值在315°左右,2号扫描仪γCS的数值在270°左右,表10中的数据与近似值相符.为了进一步验证3个扫描仪标定的准确性,在上海市逸仙高架路进行了数据采集,并利用标定的参数和GNSS等数据对扫描仪采集的数据进行解算,得到点云数据.将3个扫描仪的点云数据进行融合,如图6所示.2号扫描仪与1号、3号扫描仪有重叠的内容,如道路的标识标线,如果相互之间存在系统误差,则其在点云融合后就会变粗和变长.从点云量测结果来看,标识标线的重合程度在0.1m以内,从而进一步验证本文提出的标定方法能够很好地应用于实际情况.
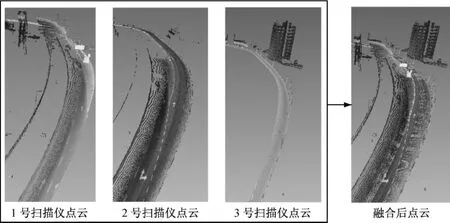
图6 点云融合Fig.6 Integration of point clouds
4 结语
本文提出一种针对集成断面激光扫描仪的车载移动测量系统的外参数标定方法,并且通过试验论证了此方法的可行性.通过多试验进行解算结果的比较,解算结果之间的差距较小,证明了此方法的稳定性和重复性.
[1]汪帆,何文峰,林昀.车载激光扫描测量系统外标定方法的研究和实现[J].城市勘测,2014(2):103.WANG Fan,HE Wenfeng,LIN Yun.Calibration methodology and realization of mobile laser system[J].Urban Geotechnical Investigation &Surveying,2014(2):103.
[2]康永伟,钟若飞,吴俣.车载激光扫描仪外参数标定方法研究[J].红外与激光工程,2008,37(Suppl.):249.KANG Yongwei,ZHONG Ruofei,WU Yu.Research of calibrating vehicle laser scanner’s external parameters[J].Infrared and Laser Engineering,2008,37(Suppl.):249.
[3]杨长强.激光扫描仪检校及车载激光点云的分类与矢量化研究[D].济南:山东科技大学,2010.YANG Changqiang.Study of laser scanner calibration and vehicle-borne laser point cloud classification &vectorization[D].Ji’nan:Shandong University of Science and Technology,2010.
[4]潘国荣,周跃寅.两种坐标系转换计算方法的比较[J].大地测量与地球动力学,2011,31(3):58.PAN Guorong,ZHOU Yueyin.Comparison between two ways of calculation of coordinate transfer[J].Journal of Geodesy and Geodynamics,2011,31(3):58.
[5]贾东峰,程效军,刘燕萍.球标靶在点云数据配准中的应用分析[J].工程勘察,2011(9):65.JIA Dongfeng,CHENG Xiaojun,LIU Yanping.Research on the application of target balls in registration of point clouds[J].Geotechnical Investigation &Surveying,2011(9):65.
Design and Implementation of Vehicle Laser Scanner’s External Parameter Calibration
YAO Lianbi,WANG Zhifei,SUN Haili
(College of Surveying and Geo-Informatics,Tongji University,Shanghai 200092,China)
This paper proposes a method to calibrate the location and gesture of laser scanner in a mobile mapping system.Firstly,vehicle and laser scanner coordinate systems were defined to simplify the calibration of the scanner as the calculation of transformation parameters.Secondly,a total station was taken to observe the coordinates of common points which consist of center of standard target ball and feature point of the scanner.With the help of the observed coordinates in a horizontal coordinate system,the transformation parameters of the vehicle and scanner coordinate systems were figured out.Finally,the method was proven to be good in repeatability through multiple experiments.The reliability is also be proven by the process of data collected on Yixian elevated road with the mobile mapping system.
mobile mapping system;laser scanner;calibration;coordinate transformation;circle fitting
P234.4
A
0253-374X(2016)01-0161-06
10.11908/j.issn.0253-374x.2016.01.024
2015-03-02
国家“八六三”高技术研究发展计划(2013AA12A206);测绘地理信息公益性行业科研专项(HY14122136)
姚连璧(1964—),男,教授,博士生导师,工学博士,主要研究方向为多传感器集成及其应用.E-mail:lianbi@tongji.edu.cn
