时滞系统模糊积分控制研究
2016-12-24吴剑威
蒋 杉,吴剑威,徐 雷,王 超,邵 威
(合肥师范学院 电子信息工程学院,安徽 合肥 230061)
时滞系统模糊积分控制研究
蒋 杉,吴剑威,徐 雷,王 超,邵 威
(合肥师范学院 电子信息工程学院,安徽 合肥 230061)
针对时滞系统非线性、滞后性等特点,运用模糊积分控制算法对系统进行控制。通过Matlab的Simulink工具箱建立模型,并做了模糊积分控制、传统模糊控制(Fuzzy control)仿真对比试验。仿真结果表明,模糊积分控制在调节时间、稳态性能等指标上明显优于模糊控制,具有更好的快速性和自适应性,是时滞系统较为理想有效的控制方法。
时滞系统,模糊控制,积分控制
在许多工业生产中,特别是在过程控制中,大多数被控对象普遍存在不同程度的时变、强扰动和时滞问题,其中时滞性极易使得被控量不能及时反映系统所承受的扰动,产生明显的超调和较长的调节时间,甚至造成系统的不稳定[1]。另外,许多控制对象都存在严重的非线性和不确定性,它们的存在是导致系统不稳定的重要根源[2]。因而对时滞系统控制器的研究就显得尤为重要。模糊控制是一种模拟人类思考的智能控制方法,对于参数不确定时滞系统这样无法精确进行数学建模的系统,通过对象的输入输出关系信息模糊化,实现良好的控制效果,因此模糊控制的理论研究及其应用都得到了广泛的关注,在经典控制理论和现代控制理论难以应用的场合都发挥了很大的作用。但是模糊控制算法的核心模糊规则和隶属度函数都是人为预设的,一旦确定以后就难以满足时变及滞后性的动态要求[3-4]。而且常规的二维模糊控制器是以误差e(error)和误差变化率ec (error rate of change)作为输入变量[5],具有比例微分控制作用,但缺少积分控制环节。而积分控制的作用能消稳态误差,提高系统的稳态精度。于是采用在模糊控制中加入积分控制,构成模糊积分控制器[6],并将其应用于时滞系统。仿真结果表明,实现了模糊控制和积分控制的优势互补,尤其当被控对象参数发生变化时优势尤为明显,具有鲁棒性好、稳态精度高、响应速度快、超调量小等优点,是一种有效的控制方案。
1 时滞系统数学模型
时滞系统的传递函数模型为:
(1)
式(1)中,K为比例系数,T为惯性环节时间参数,τ为纯滞后时间, τ/T用来反应滞后程度。
2 模糊积分控制器的设计
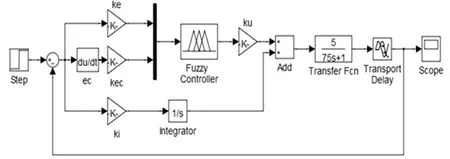
图1 模糊积分控制器结构和仿真模型
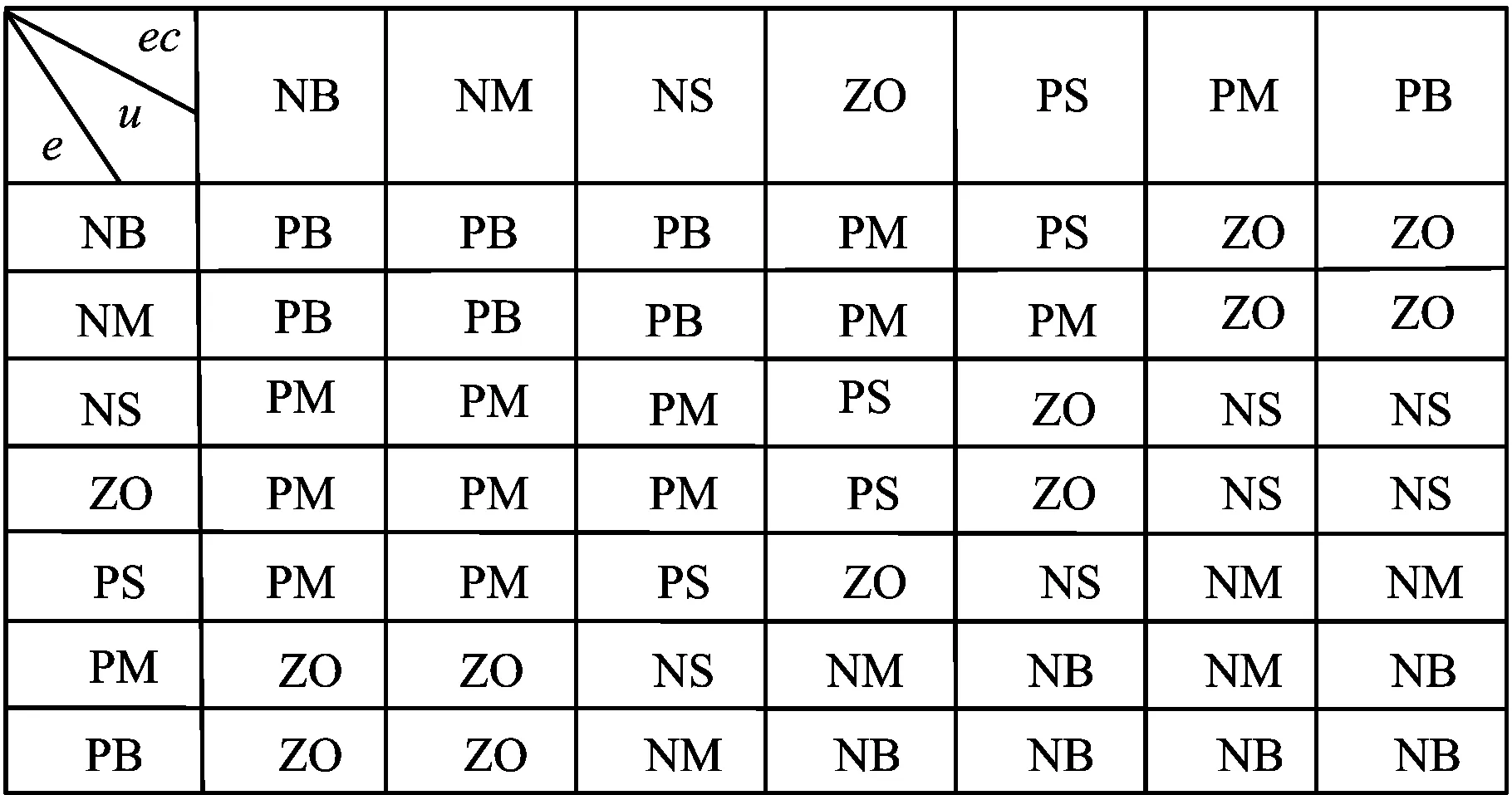
文中采用Matlab软件的Simulink工具箱实现建模与仿真,模糊积分控制器的结构如图1所示,由常规模糊控制器和积分控制器并联而成[7],控制器的输出是两者之和。图1中的模糊控制器(Fuzzy Controller)以误差和误差变化率为输入变量,u为输出变量。各变量的模糊子集均为{NB负大,NM负中,NS负小,ZO零,PS正小,PM正中,PB正大},模糊论域均为[-1,1]。各模糊变量均采用三角形隶属度函数。采用if A and B then C的控制规则进行模糊推理以及重心法进行反模糊化运算。根据专家知识和实际经验,其模糊控制规则如表1所示[8]。
表1 模糊控制器的模糊控制规则
3 仿真实验与分析
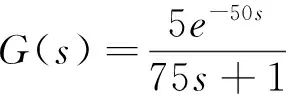
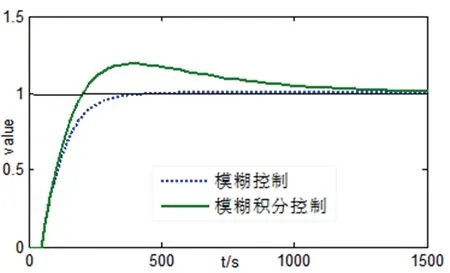
图2 模型匹配仿真结果
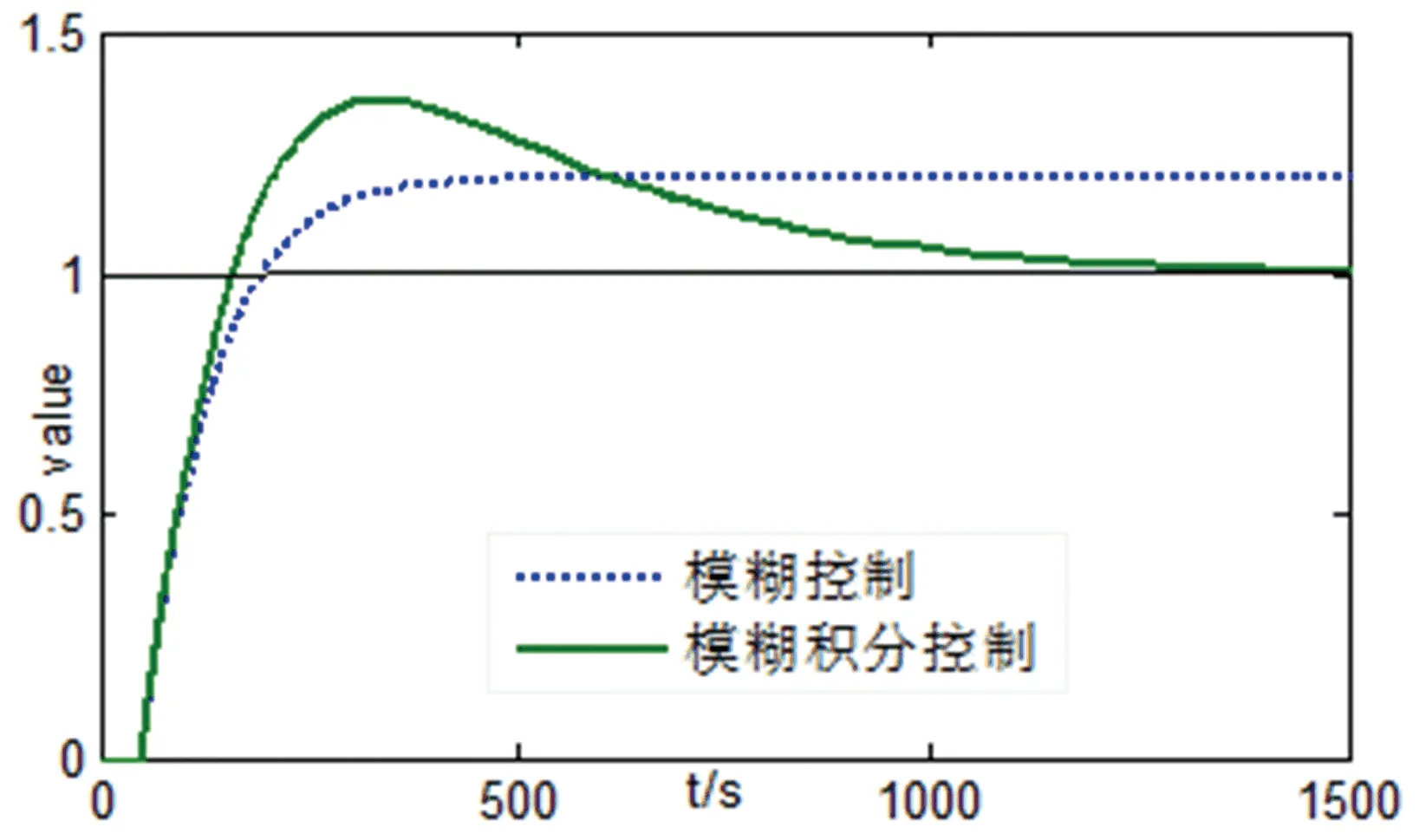
图3 模型不匹配情况1仿真结果
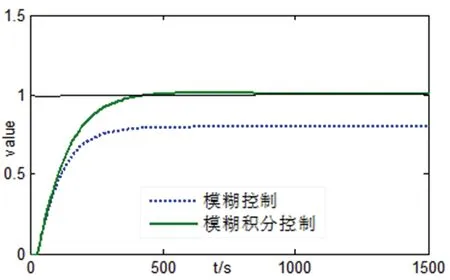
图4 模型不匹配情况2仿真结果
由仿真结果可知,模型匹配时模糊积分控制和模糊控制的稳态误差均为0,尽管前者有超调量,但其仅为12%左右,完全能满足控制系统的要求。而在模型不匹配时,传统的模糊控制的稳态误差和超调量都无法满足时滞系统的精度控制要求,充分展现了模糊控制的缺点。因此,模糊积分控制方法对于时滞系统,调节时间、系统性能都优于传统的模糊控制,具有良好的快速性和稳定性。
4 结论
本文设计了基于模糊积分算法的时滞系统控制方法。仿真结果证明了设计的正确性,对于纯滞后,非线性系统,模糊积分控制不仅能明显改善系统的动、静态性能,而且具有更好的鲁棒性和自适应性,是一种较为理想和有效的控制方法。
[1] 王丽君,李擎,童朝南等.时滞系统的自抗扰控制综述[J].控制理论与应用,2013,30(12):1521-1533.
[2] 蒋杉,吴剑威,申远等.流量控制系统模糊控制器设计与仿真[J].合肥师范学院学报,2014,32(6):20-22.
[3] 张堃,费敏锐,吴建国等.一类参数不确定时滞系统的智能控制应用研究[J].仪器仪表学报,2014,35(6):1395-1401.
[4] 吴常铖,宋爱国,章华涛. 一种肌电假手的自适应模糊控制方法[J].仪器仪表学报,2013,34(6):1339-1345.
[5] 吴剑威,孔慧芳,唐立新. 智能模糊自适应PID在化学反应釜温度控制系统中的应用[J].计算机与应用化学,2013,30(2):121-124.
[6] 孙前来.模糊积分控制在位置随动系统中的应用[J].太原科技大学学报,2009,30(3):203-206.
[7] 柴盛丛,赵为,杨淑英等. 基于模糊-积分控制器的风电变换器控制策略[J].电力电子技术,2011,45(8):63-65.
[8] 吴剑威,唐立新.一种智能模糊PID在温度控制系统中的应用[J].电源技术,2013,(37) 5:847-849.
Research on Fuzzy-integral Control in Time-delay Systems
JIANG Shan, WU Jianwei, XU Lei, WANG Chao, SHAO Wei
(School of Electronic and Information Engineering, Hefei Normal University, Hefei 230061, China)
Fuzzy integral control algorithm was used in time-delay system control aiming at the characteristics of nonlinearity and hysteretic nature. Then the simulation models were created in Simulink of Matlab for simulation comparison of fuzzy integral control and fuzzy control. Simulation results show it is better than fuzzy control in settling time and static performance. Thus it has better adaptability and rapidity, which is an ideal and effective control algorithm.
time-delay systems, fuzzy control, integral control
2016-06-18
合肥师范学院科研团队项目(2015TD03),合肥师范学院产学研项目(2014cxy31)资助
蒋杉(1985-),男,硕士,合肥师范学院电子信息工程学院教师。
TP273
A
1674-2273(2016)06-0015-03
