直流无刷电机换相信号的纠错控制
2016-12-24陈兵兵张忠祥周元元
陈兵兵,张忠祥,周元元
(合肥师范学院 电子信息工程学院,魂芯DSP研究院,安徽 合肥 230000)
直流无刷电机换相信号的纠错控制
陈兵兵,张忠祥,周元元
(合肥师范学院 电子信息工程学院,魂芯DSP研究院,安徽 合肥 230000)
针对直流无刷电机控制系统的缺相无法运行问题,根据电机反电动势中包含有转子位置信息,提出直流无刷电机容错控制系统算法。在分析各种错误换相信号下电机的运行状况后,将其反电动势信号进行FFT运算,分析其功率谱,根据相应的规则识别出错误的换相信号,并输出正确的换相信号,系统实现简单,不需要外加电路。最后,利用Matlab/Simulink软件对所提方法进行仿真验证,实验结果表明,该算法能够使电机在获得错误的位置信号后继续提供正确的换相信号,明显提升了电机控制器的整体性能。
直流无刷电机;Matlab/Simulink;FFT
近年来,三相直流无刷电机(以下简称直流无刷电机)以其良好的动态性能、结构简单、维护方便等优点[1],在办公自动化、仪器仪表、航模以及家电等领域得到了广泛的应用[2]。常用直流无刷电机中转子的位置检测方法可分为两种: 位置传感器检测及无位置传感器,前者指在电机上安装若干个(一般是3个)位置检测传感器检测转子位置[3]; 后者则通过测量电机内部电流、电压等信息,利用相关公式将这些物理量换算成转子的位置,间接获得电机转子的位置信息[4]。无位置传感器技术省去若干个位置传感器,从而简化系统结构,降低了系统成本,硬件上提高了系统工作的稳定性,但其控制算法复杂,精度难以保证,特别是存在电机起动困难,负载性能不理想,转速范围小等缺点,因此在工程应用中采用位置传感器检测转子位置更为普遍[5]。直流无刷电机控制系统原理框图如图1所示。
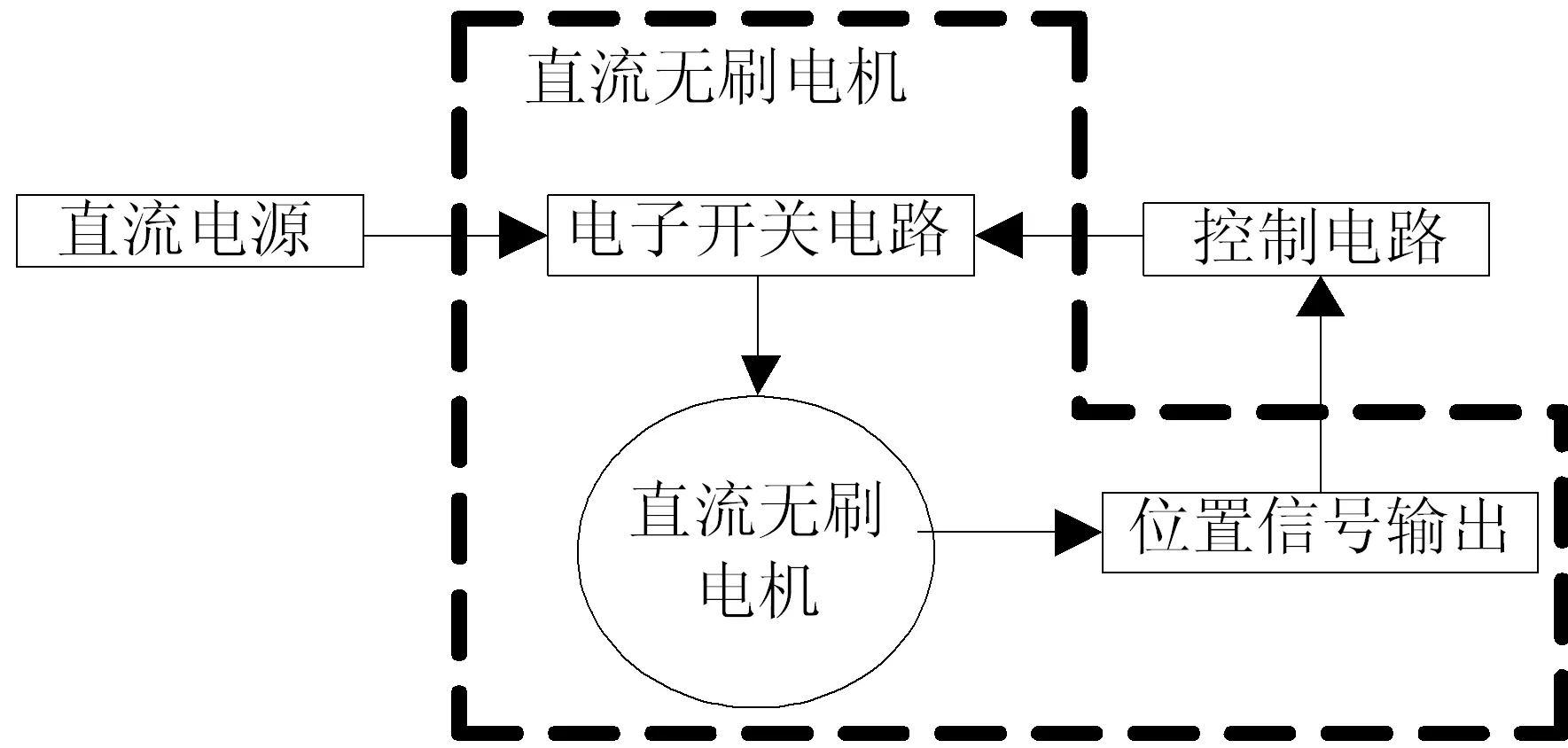
图1 直流无刷电机控制系统原理框图
近年来,从工业控制等自动化设备到家用电器等领域的控制和测量,位置传感器均起着不可或缺的作用[6]。但在电机高速运行过程中,若位置传感器发生异常工作的情况;电机在正常运行时,某一个位置传感器突然损坏的情况,若没有提前采取软件保护措施,电机将会进入缺相运行状态,此状态下当电机的相电流超过正常值时将导致无刷电机以及电机驱动板严重发热直至烧毁,后果很严重[7]。故有必要为无刷电机控制加上当电机缺相后的处理算法,以防止上述情况的发生。本文介绍一种高效的电机缺相控制策略,一方面解决由于位置传感器所引起的系统工作不正常,另一方面部改变电机硬件的基础上使系统运行可靠。
1 直流无刷电机运行状态分析
假设直流无刷电机绕组为星形连接,因此需要在电机内部安装三个霍尔传感器检测电机转子的位置,且三个霍尔传感器之间的电角度为120°电角度[8]。传感器根据转子极性输出相应的高低电平,因此,换相信号在一个电周期内呈现出180°高电平与180°低电平,理想情况下霍尔传感器根据转子位置输出正确的换相信号如图2所示。
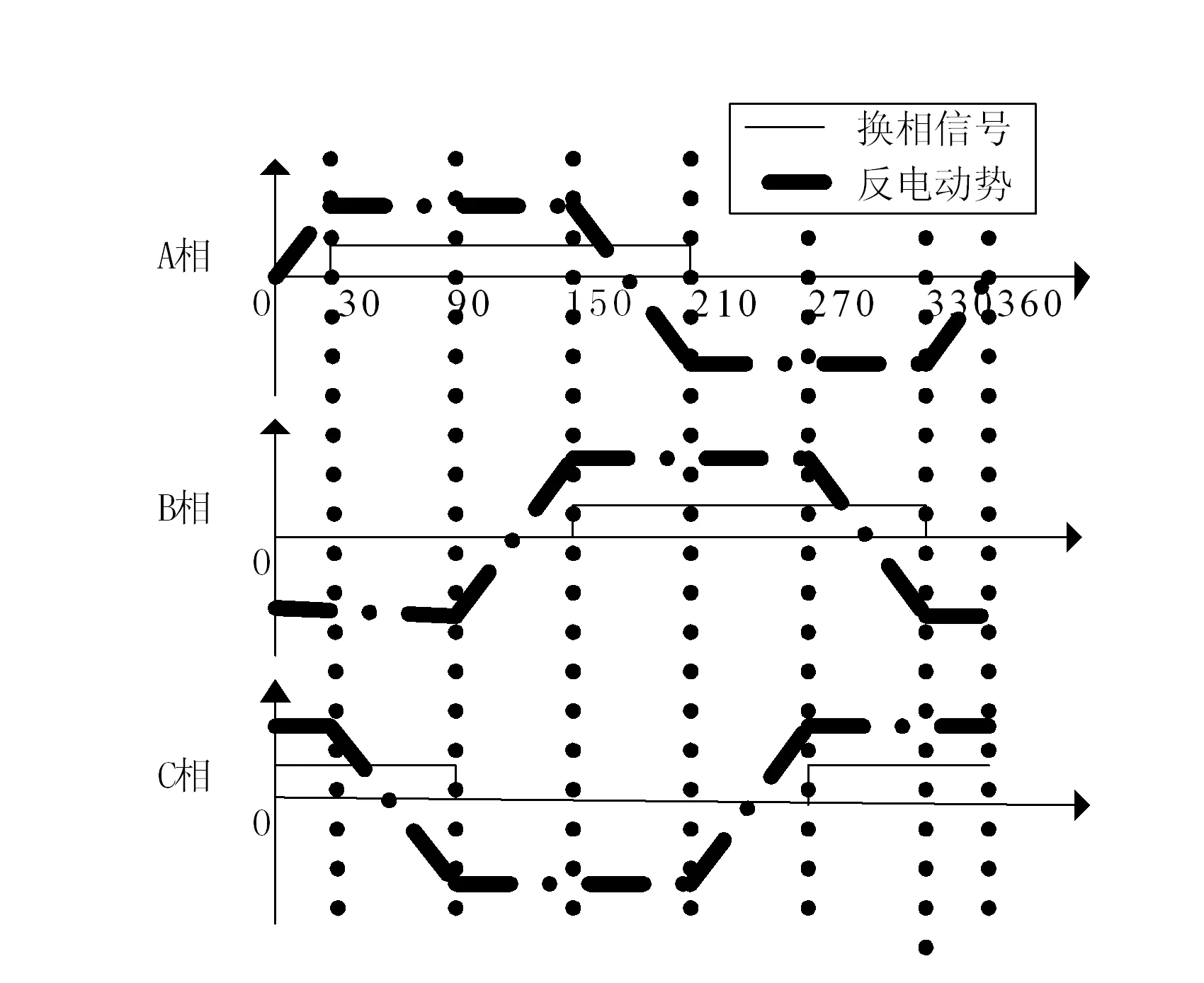
图2 理想情况下反电动势与换相信号
位置传感器在正常工作情况下,只会输出二进制数字信号。所以任一位置传感器在工作过程中,只有两种错误的工作状态:一种是当正确的换相信号为高电平时,实际却输出低电平,本文以变量Hall=0表示这种工作状态,此处以任一霍尔传感器A为例,则以HallA=0表明发生了该错误。当位置传感器正确的换相信号为低电平,实际的换相信号为高电平,此时以Hall=1表达式表示,若此时霍尔传感器B发生该种错误,则以HallB=1表示电机B相发生了该种错误。
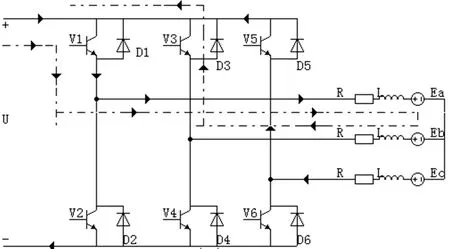
图3 直流无刷电机控制电路图
2 直流无刷电机缺相运行状态分析
直流无刷电机通常采用全桥驱动的方式,如图3所示。任一换相信号出错都会影响一个或两个MOS管的驱动信号,例如霍尔传感器A(HallA)产生了错误的换相信号,假设HallA=0的情况,在正常情况下开通顺序为:V1V4→V1V6→V3V6→V2V3→V2V5→V4V5,此时三相位置传感器输出信号组合应为:100→110→010→011→001→101,如图4所示。
如果发生霍尔传感器A输出的信号一直为0,即发生HallA=0错误。此时开通顺序变为:无MOS开通→V3V6→V3V6→V2V3→V2V5→V2V5,这将导致电机的迅速发热,电机的电磁转矩、转速以及相电流等参数都将受到严重的影响。图5为霍尔传感器A发生HallA=0出错前后的转速对比。

图4 直流无刷电机换相图
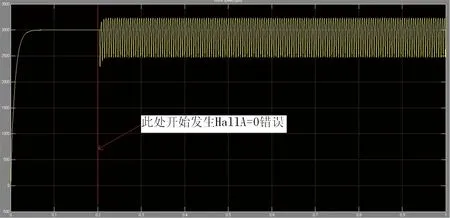
图5 转速对比
3 纠错控制算法
在一个电周期内,正常情况下三个位置传感器输出值的和为1或为2。如果为0或3,则说明某一换相信号发生了错误。下面将利用变量Htotal来表示它们的和。
Htotal=Ha+Hb+Hc
(1)
当Htotal=0时,说明某相传感器的输出信号一直为0,反之,若Htotal=3,则说明某相传感器的输出信号一直为1。接下来需要确定的是哪一相霍尔传感器出现什么问题,仍然以A相霍尔传感器为例进行分析。
FFT是离散傅立叶变换的快速算法,可以将一个信号变换到频域。电机反电动势信号在时域很难看出什么特征,如图6所示,图6中上面一个图为电机A相反动电势波形,中间为B相反电动势波形,下面为C相反电动势波形。但是如果变换到频域之后,就很容易看出特征了。FFT变换后每一个点就对应着一个频率点,该信号的模值,就是该频率值下的幅值特性,具体和原信号的峰值A的关系为:假设信号的峰值为A,那么FFT的结果的每一点的模值就是A的N/2倍。由图4可知,当电机在0.5s处发生换相错误时,反电动势的幅值发生了明显变化,因此,可以通过FFT的方法判断出该相出现问题。由于FFT结果的对称性,通常我们只使用前半部分的结果,即小于采样频率一半的结果。
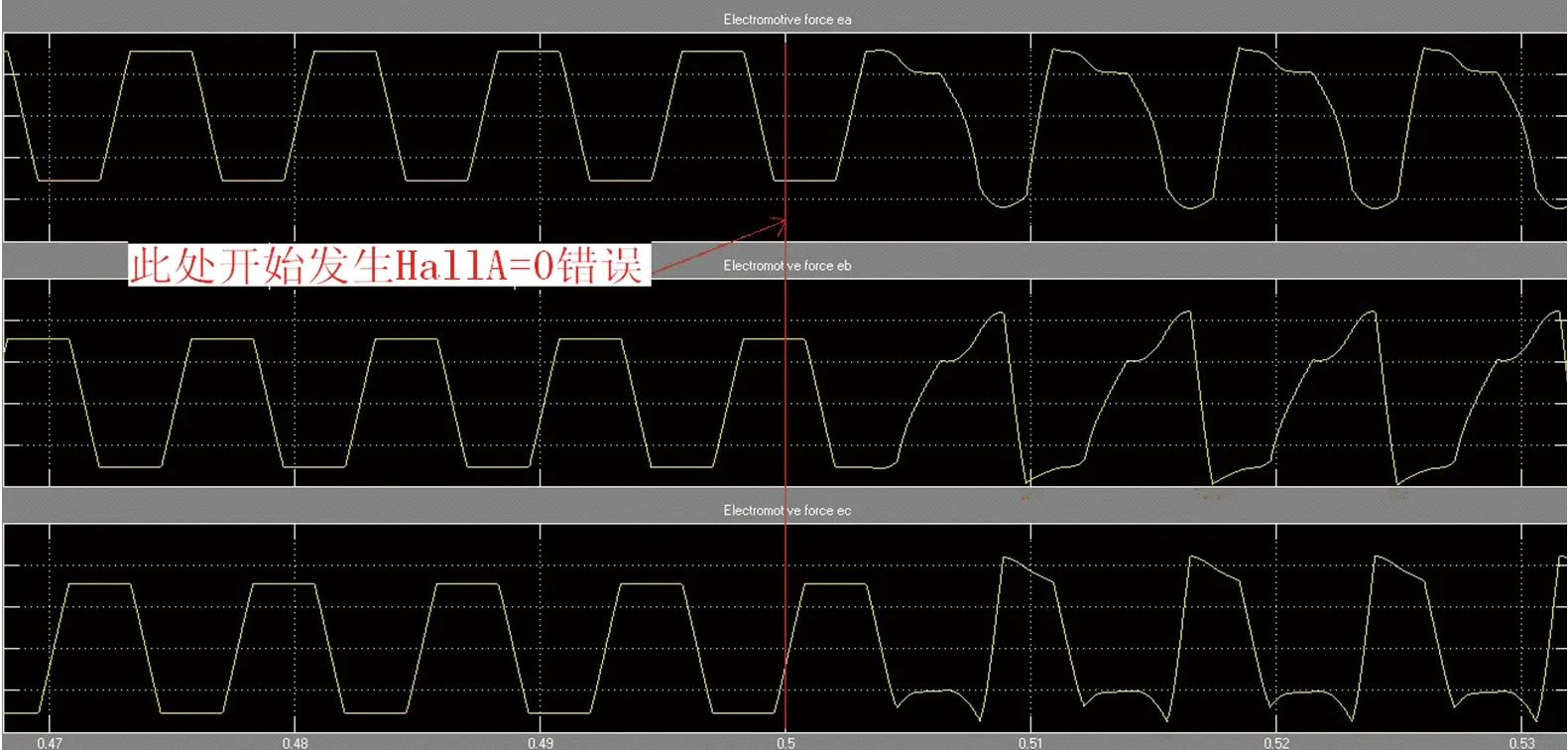
图6 反电动势信号
直流无刷电机反电动势中包含有换相信号的信息,所以利用FFT运算得到三相电机反电动势的频谱,然后计算其功率谱。图7中第一行两个图分别表示的是:当电机正常运行时,A、B相反电动势Ea、Eb的功率谱;第二行分别表示:当出现HallA=0错误时,Ea的功率谱,Eb的功率谱。
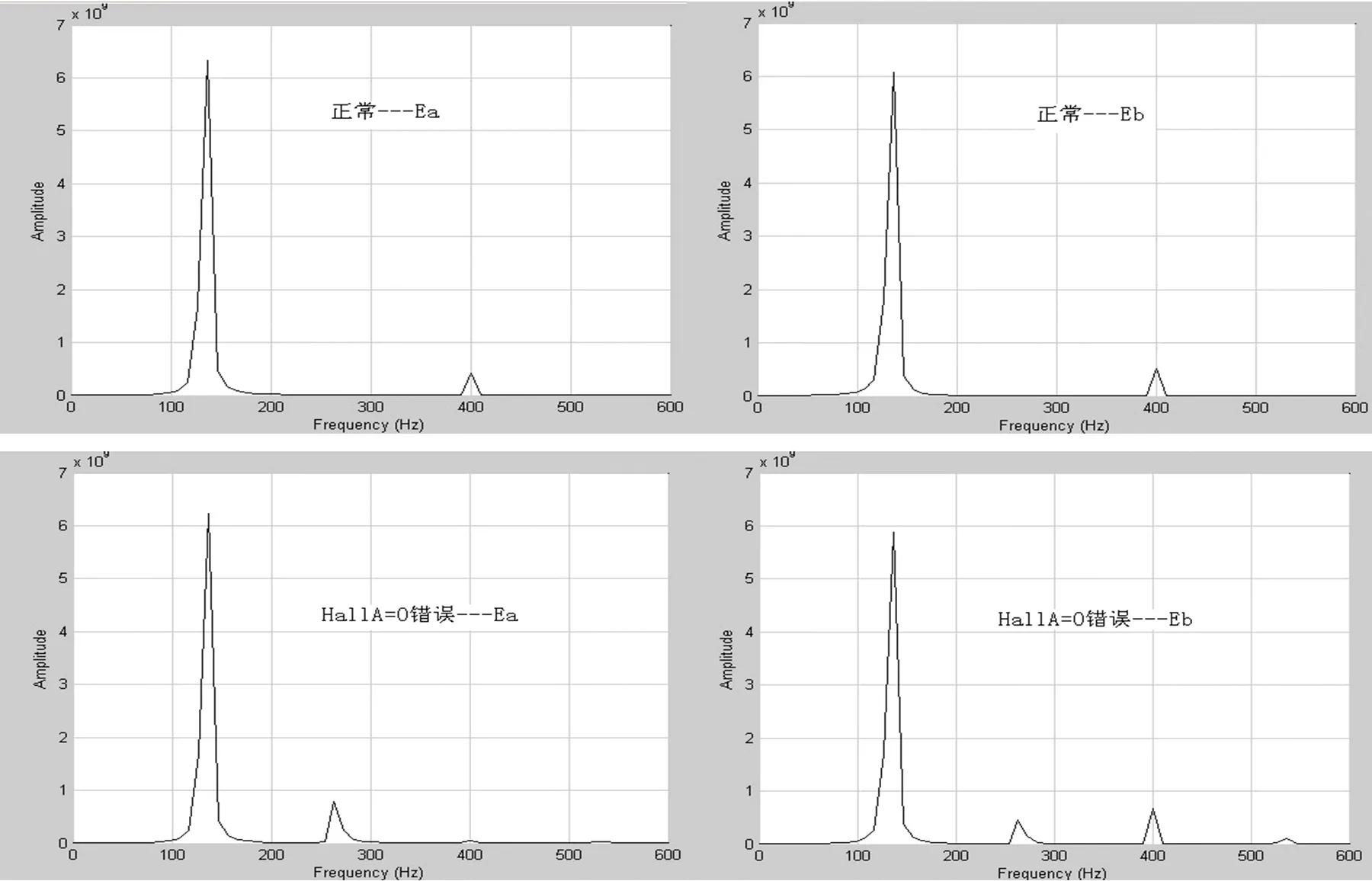
图7 电机正常运行与发生HallA=0错误
由图7可见,当发生HallA错误时,电机反电动势与正常运行相比最大的区别在频率为260Hz左右时的幅值大小不同,当发生HallB错误时(图6所示),反电动势Eb在频率为260Hz左右时的幅值大小,同理当发生HallC错误时,验证Ec在频率为260左右Hz左右时对应的幅值。因此利用上述方法可以很方便的分辨出是哪一相换相信号出现了错误。
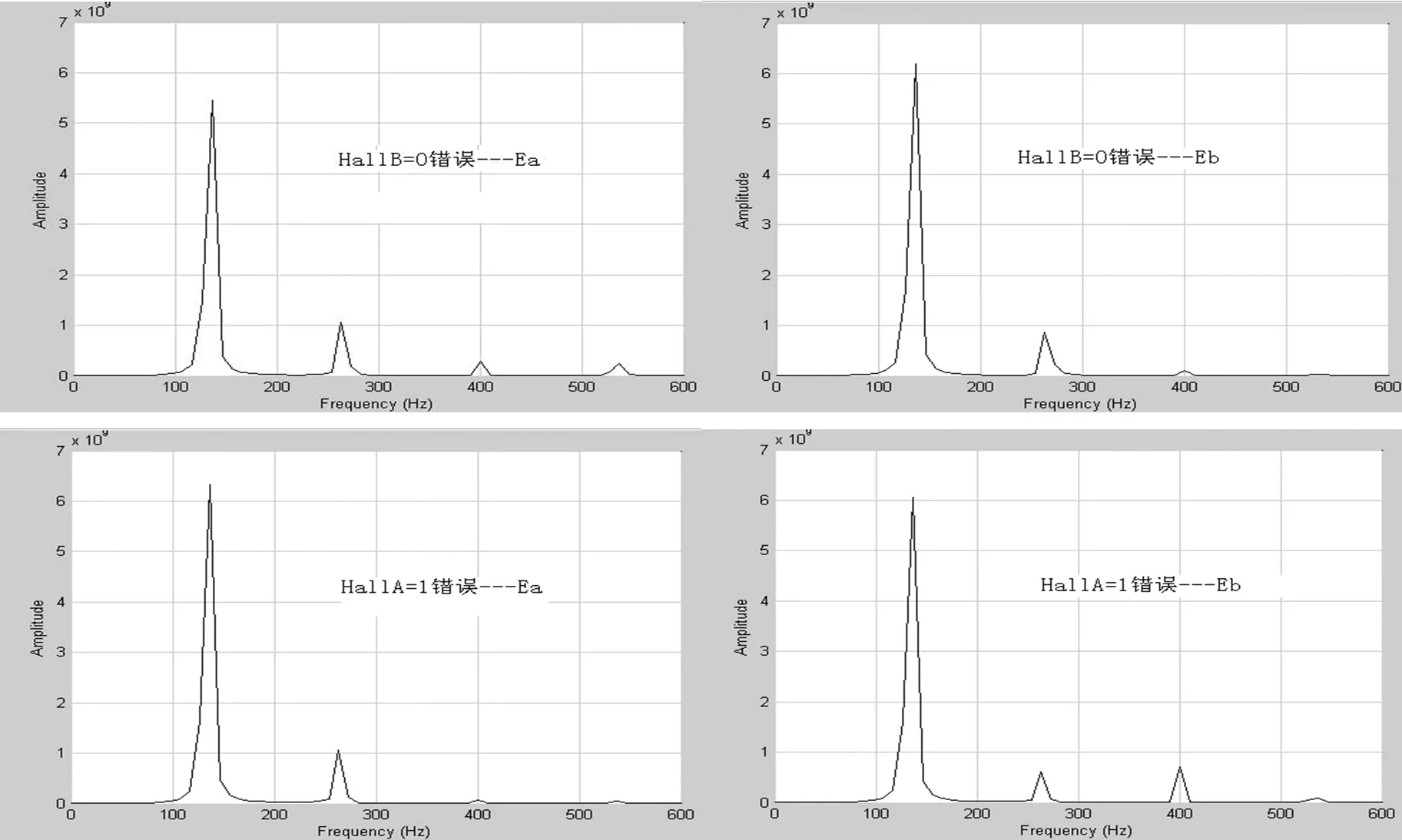
图8 HallB=0错误以及HallA=1错误
表1 HallA错误功率谱幅值

反电动势频率(Hz)HallA=0幅值(V)HallA=1幅值(V)Ea13662346320264787105040051.5665303254
由仿真图可见,当发生HallA=0错误与HallA=1错误时,功率谱基本相似,但几个关键点的幅值大小有所不同,HallA=1错误时在136Hz、264Hz、400Hz以及530Hz处功率谱的幅值明显大于HallA=0错误时的幅值,下表列出了实验测试值。
当控制器没有获得正确的换相信号时,控制系统的性能将大大降低。本系统首先通过检测三个霍尔传感器的和,若值不等于1或2,说明系统没有得到正确的换相信号,其次,通过检测三相反电动势的功率谱,以确定具体是哪相传感器出现差错,最后通过计算相应功率谱的幅值,区分HallA=0于HallA=1错误。
4 实验结果
系统通过Matlab/Simulink软件对容错控制方法进行仿真,仿真参数如下:当电机正常运行时,电机负载转矩TL=3,定子电阻Rs=1ohm,相电感Ls=0.001H,转动惯量J=0.8×10-3kg·m2,电机极对数P=4,电机在0.2s处发生HallA=0错误,测试电机在2000 rad/min条件下运行,电机正常运行一个电周期的时间t360=0.0075s。
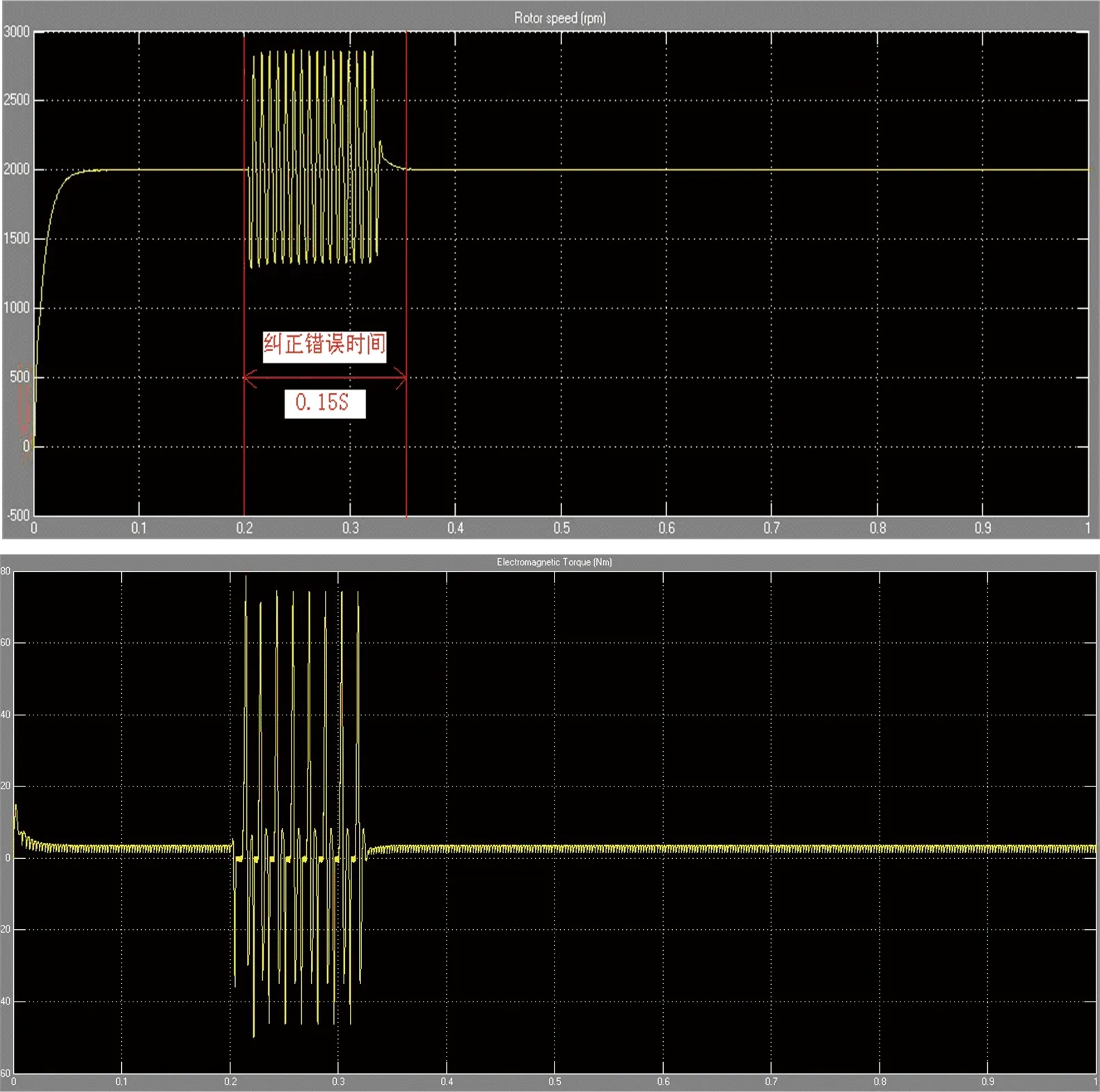
图9 容错系统中转速与转矩情况
由图9可知,该方法能0.15s左右的时间输出正确的换相信号,在纠正输出之后,电机转速波形依然平滑,纠正错误输出的时间很短,基本满足日常应用,另外纠正输出后电机转矩波动明显减小,与电机正常运行时一致,证明了该方法的可行性。
4 小结
本文介绍了直流无刷电机容错控制系统,该系统能够实现在位置传感器无法正确输出换相信号时系统依然正常工作,在分析电机在发生获得错误换相信号时的运行状况后,详细讲解了一种简单处理错误换相信号的方法,该方法通过分别采样电机三个相的反电动势,对其进行FFT变换,然后得到器功率谱,通过对功率谱分析可以方便的得到具体是哪一相换相信号出现错误,出现什么错误。该方法实现简单,使电机运行平稳,提高了控制系统的整体性能。
[1] Lai Yen-Shin,Lin Yong-Kai.Novel back-EMF detection technique of brushless DC motor drives for wide range control without using current and position sensors[J].IEEE Transactions on Power Electronics,2008,23(2):934-940.
[2] A.Tashakori, M.Ektesabi.Position sensors fault tolerant control system in BLDC Motors [J].International Association of Engineers, 2014, 22(1):39-47.
[3] Gui-Jia Su,McKeever J W.Low-cost sensorless control of brushless DC motors with improved speed range[J].IEEE Transactions on Power Electronics,2004,19(2):296-302.
[4] Dan M Ionel.Finite element analysis of brushless DC motors for flux weakening opreration[J].IEEE Trans.on Magneties,1996,32(5):5040-5042.
[5] 薛林锋,罗隆福,杨晨.基于 DSP 的无位置传感器无刷直流电机控制技术[J].长沙电力学院学报:自然科学版,2005,20(4):1-4.
[6] 吴雪梅,景占荣,史永奇.基于DSP的直流无刷电机控制技术研究[J].机械与电子,2005(3):50-52.
[7] 张磊,肖伟,瞿文龙.直接检测无刷直流电机转子位置信号的方法[J].清华大学学报:自然科学版,2006,46(4):453-456.
[8] 韦鲲,任军军,熊宇,张仲超. 无位置传感器无刷直流电机SIMULINK仿真模型的建模[J].微电机,2004,37(5):26-29.
Commutation Signal's Correction Control of Brushless DC Motor
CHEN Bingbing, ZHANG Zhongxiang, ZHOU Yuanyuan
(School of Electronic and Information Engineering, Hefei Normal University, Hefei 230601, China)
Aiming at the lack phase of permanent magnet brushless DC motor (BLDCM) control system, which can not run normally, and the motor back EMF, which contains rotor position information, the fault-tolerant control system was proposed for brushless DC motor. After analyzing the various error commutation with brushless DC motor under operating conditions, using FFT computation for the motor back EMF signal, analysis of the power spectrum was made according to the appropriate rules to identify errors commutation signals, and output the correct commutation signals. The system is simple and does not require external circuitry. Finally, Matlab/ Simulink software were used to verify the proposed method, the experimental results show that the algorithm can get the motor's correct commutation signals in the wrong position, significantly improved the performance of the motor controller.
BLDCM; Matlab/Simulink; FFT
2016-05-20
2015年合肥师范学院校级青年基金项目(项目号:2015QN01);安徽省高校优秀人才支持重点项目(项目号:gxyqZD2016232);安徽省高校优秀人才支持重点项目(项目号:gxyqZD2016233)资助
陈兵兵(1986-),男,安徽安庆人,讲师,硕士,研究方向:无刷直流电机控制。
O442
A
1674-2273(2016)06-0017-04