基于模型切换策略的无刷直流电动机调速研究
2016-12-21陈鹏展
陈鹏展,刘 曦
(华东交通大学,南昌 330013)
基于模型切换策略的无刷直流电动机调速研究
陈鹏展,刘 曦
(华东交通大学,南昌 330013)
提出了一类基于模型切换策略的无刷电机宽范围调速方法,根据电机特性给电机速度目标值定义高/低速运行区间,当电机在低速区运行时,采用积分分离PID控制策略;电机在高速区运行,采用增量式PID控制策略,结合预先设定的速度过渡区,通过滞后切换实现控制模型转换。实验表明,提出的模型切换控制策略在低速和高速运行区域均能实现无刷直流电动机精确速度闭环控制,且模型间切换控制过程稳定,实现了无刷直流电动机的宽范围调速。
无刷直流电动机;多模型控制;滞后切换;宽范围调速
0 引 言
随着无刷直流电动机(以下简称BLDCM)在工业自动化、汽车、家电领域的广泛应用,BLDCM的控制策略已成为业内研究的热点。各类应用场合对BLDCM的系统性能要求越来越高,单一模型的控制策略已无法满足被控对象的稳定性、准确性、快速性要求。继而,多模型控制策略受到广泛的关注与研究[1-5]。传统电机控制策略多为单一PID控制,面对现代复杂系统,此类控制策略已无法满足业内需求。
多模型控制策略可根据对象参数的变化建立多个控制模型,通过改变控制策略,逼近复杂系统的动态特性,这样使得系统整体性能满足控制需求。
在电机调速过程中,系统参数会发生变化,为提高电机的控制性能,现将多模型控制策略应用于无刷直流电动机控制系统。本文将对基于多模型切换控制策略的BLDCM宽范围调速进行研究。
1 模型切换控制原理
1.1 低速积分分离PID控制
针对电机特性,电机在低速启动、运行时由于系统有惯性和滞后,超调量和调节时间都会较大。为使BLDCM闭环系统在低速时获得最大低速调速范围,需尽量减小超调量,避免由于电机在闭环PID调节中PWM输出控制响应过慢而使电机停机。
低速积分分离PID控制能减小超调量,有效增大低速调速范围,积分分离PID控制算法如下[6]:
(1)

(2)
当|error(k)|>ε时,采用PD控制,避免产生过大超调,系统响应较快。
当error(k)|≤ε时,采用PID控制,以保证系统控制精度。
式中:T为采样时间,β为积分开关系数。
1.2 高速增量式PID控制
由于增量式PID算法不需累加,控制增量仅与最近采样点有关,误动作时影响较小。在电动机处于高速运行区时,采用增量式PID控制,能有效保证BLDCM处于高速运行区的调速闭环响应。增量式PID控制算法如下[6],根据递推原理可得:

(3)
则增量式PID控制算法:

(4)
Δu(k)=kp[error(k)-error(k-1)]+kierror(k)+
(5)
1.3 BLDCM多模型协同闭环系统
多模型切换控制[7]为多模型控制的主要控制策略。多模型切换控制的核心在于切换逻辑,切换逻辑的优劣决定着控制系统性能的好坏,主要切换逻辑有:状态切换[8]、滞留时间切换[9]、滞后切换[10]。基于BLDCM控制系统的特性,将采用滞后切换方式实现电机低速/高速控制模型的切换。通过传统BLDCM单一PID控制性能测试,结合控制系统反馈的性能指标,将电机转速小于1 000 r/min定义为低速运行区域;电机转速位于1 000 r/min至1 200 r/min之间定义为切换过渡区;电机转速高于1 200 r/min 定义为高速运行区。
最初采用在低速和高速直接设定一个限定速度作为控制方式的切换点,但实验测试点切换控制方式时,如果调速过快,电动机容易出现速度跳变、系统不稳定现象。考虑此点,本文为提高系统在控制方式切换时的稳定性,将在控制方式切换时设置过渡区进行滞后切换。模型切换控制策略示意图如图1所示。

图1 控制策略示意图
根据图1模型切换控制策略示意图,当系统由低速控制方式切换至高速控制方式时,在过渡区采用低速控制方式;当系统由高速控制方式切换至低速控制方式时,在过渡区采用高速控制方式,在本控制系统中设定v1为1 000 r/min,v2为1 200 r/min。
根据BLDCM调速过程中不同转速阶段,将BLDCM调速过程分为低速运行区和高速运行区,分别建立相应控制模型,实现BLDCM多模型切换控制[11]。低速运行区域,应用积分分离PID控制策略;高速运行区域,应用增量式PID控制策略。则BLDCM模型切换控制系统框图如图2所示。
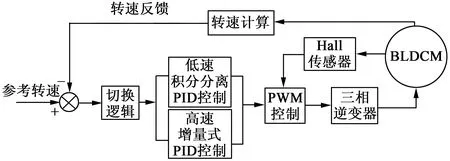
图2 BLDCM模型切换控制系统框图
2 模型切换策略平台构建
实验平台采用STM32F103RBT6作为控制系统主芯片,MOSFET驱动电路采用N+N结构,以IR2101作为MOSFET驱动芯片。以42BLF02 BLDCM作为被控对象。电子换向采用“二相导通星形三相六状态”方式[12]。BLDCM控制系统等效框图如图3所示。

图3 BLDCM控制系统等效框图
图4为实验平台,直流稳压电源为BLDCM驱动板提供24 V直流电压,上位机通过JTAG仿真器与BLDCM驱动板实现通信,BLDCM驱动板在霍尔传感器的基础上实现对电机的驱动与电机转速的计算, FT232RL将电机转速实时传递给上位机,上位机在LabVIEW中对电机转速进行实时监控。通过转速表测量电机转速,对比监控数据,校验上位机数据的准确性。

图4 实验平台
3 BLDCM控制性能测试
针对本实验平台,电动机闭环速度最低250 r/min,最高转速4 200 r/min。为了验证本文中基于多模型滞后切换BLDCM控制系统的性能,在实验平台上调速测试。实验过程中的数据采样周期为15 ms。
图5、图6为控制系统在80 Hz斜坡信号下多模型滞后切换控制。图5为电机在80 Hz频率斜坡信号下,BLDCM控制系统通过滞后切换实现低速区至高速区切换;图6为电机在80 Hz频率斜坡信号下BLDCM控制系统通过滞后切换实现高速区至低速区切换。系统稳定、无抖动。

图5 滞后切换80 Hz斜坡信号控制系统测试 (低速切换至高速)

图6 滞后切换80 Hz斜坡信号控制系统测试 (高速切换至低速)
图7为多模型点切换控制电机频率响应。由图可见,控制系统执行点切换时,系统出现抖动、电机速度跳变、系统不稳定的现象,表明本文提出的多模型切换控制策略的有效性。

图7 点切换80 Hz斜坡信号控制系统测试
图8 为BLDCM控制系统低速外界扰动测试。由测试结果可见,在外界扰动情况下系统能快速通过闭环系统调节,回归稳态设定速度;在外界扰动消失后,闭环系统能快速回归稳态设定速度。表明本文提出的多模型协同控制系统在低速运行时具有良好的抗外界扰动性能。

图8 BLDCM控制系统低速外界扰动测试
图9为图8所示低速外界扰动误差曲线,如图所示,控制系统对低速运行时外界扰动调节性能良好,最大超调量在20%以下。
图10为BLDCM控制系统高速外界扰动测试。由测试结果可见,在外界扰动情况下系统能快速通过闭环系统调节,回归稳态设定速度;在外界扰动消失后,闭环系统能快速回归稳态设定速度。表明本文提出的多模型协同控制系统在高速运行时具有良好的抗外界扰动性能。

图9 低速扰动误差曲线

图10 BLDCM控制系统高速外界扰动测试
图11为图10所示高速外界扰动误差曲线,如图所示,控制系统对高速运行时外界扰动调节性能良好,最大超调量在15%以下。
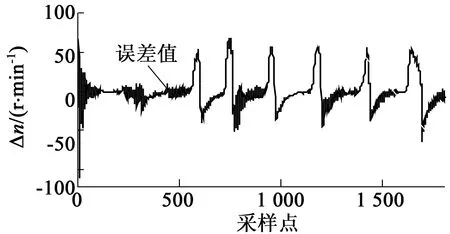
图11 高速扰动误差曲线
图12为高速启动电机转速响应曲线,在实验中,设置1 600 r/min高速启动,曲线表明, 45个采样点系统达到稳态,调整时间为0.675 s。说明本BLDCM控制系统具有良好的高速启动特性。

图12 高速启动特性
图13为低速启动电机转速响应曲线,在实验中,设置500 r/min低速启动,实验数据表明, 80个采样点后达到稳态,调整时间为1.2 s。说明本BLDCM控制系统具有良好的低速启动特性。

图13 低速启动特性
4 结 语
本文在传统BLDCM调速控制系统的基础上,提出多模型切换控制策略,实现了BLDCM宽范围调速。根据实验结果,可得出以下结论:
(1)文中提出BLDCM低速/高速分区调速控制,通过滞后切换逻辑实现低速/高速控制策略柔性转换,避免了常见多模型切换控制过程中出现的控制系统抖动、崩溃等现象。
(2)本文提出的BLDCM控制系统在低速运行、高速运行过程中,均具有良好的抗扰动性能,证明了多模型控制策略的稳定性。
(3)文中提出的多模型控制策略,可保证BLDCM控制系统的整个速度运行区间内均能保持良好的准确性,实现电机宽范围闭环控制。
[1]AADERSONBDO,DEHGHANIA.Challengesofadaptivecontrol-past,permanentandfuture[J].AnnualReviewsinControl,2008,32(2):123-135.
[2]NARENDRAKS,HANZ.Thechangingfaceofadaptivecontrol[J].AnnualReviewinControl,2011,35(1):1-12.
[3] 胡国龙, 孙优贤. 多模型控制方法的研究进展及其应用现状[J].信息与控制,2004, 33(1):72-76.
[4] 李晓理,王伟,孙维.多模型自适应控制[J].控制与决策,2000,15(4):390-394.
[5] 刘琳琳.多层次多模型预测控制算法的模型切换方法研究[J].自动化学报,2013,39(5):626-630.
[6] 潘新民.微型计算机控制技术[M].北京:高等教育出版社,2001.
[7] 陈杰,陈伟,孙健.多模型自适应控制研究概述[J].系统科学与数学,2014,34(12):1421-1437.
[8]PERSISCD,SANSISRD,MORSEAS.Supervisorycontrolwithstate-dependentdwell-timelogicandconstraints[J].Auotmatica,2004,40(2):269-275.
[9]CAOM,MORSEAS.Dwell-timeswitching[J].System&ControlLetters, 2010,59(1): 57-65.
[10]HESPANHAJP.Logical-BasedSwitchingAlgorithmsinControl[D].NewHaven:YaleUniversity,1998.
[11] 王世虎,沈炯,李益国.多模型控制方法及其研究进展[J].工业仪表与自动化装置,2008:13-17.
[12] 叶金虎,徐思海,张明颉,等.无刷直流电动机[M].北京:科学出版社,1982.
Research on Speed Control of Brushless DC Motor Based on Model Switching Strategy
CHENPeng-zhan,LIUXi
(East China Jiaotong University,Nanchang 330013,China)
A wide range speed adjustment method of brushless DC motor based on model switching strategy was proposed. According to the motor characteristics the high/low speed operating range was defined for a target value of motor speed, using integral separation PID control strategy when the motor running in low speed region and using the incremental PID control strategy when the motor in high speed. Combined with the preset speed transition region, t he control model was transformed by hysteresis switching. Experimental results show that the proposed model switching control strategy in the region of the low-speed and high-speed operation can achieve precise speed closed-loop control of brushless DC motor, wide speed range, and stable model switching.
brushless DC motor; multi-model coordinated control; hysteresis switching;wide speed control
2015-10-02
国家自然科学基金项目(61164011);江西省自然科学基金项目(20114BAB201023);江西省研究生创新专项基金项目(YC2014-X006);江西省博士后科研择优项目
TM33
A
1004-7018(2016)07-0056-03
陈鹏展(1975-),男,博士,副教授,研究方向为智能化自动化装置及汽车电子控制、现场总线控制及网络控制。
