双馈风力发电机转子电流滑模变结构观测器运行研究
2016-12-21钟泽航杨俊华
钟泽航,杨俊华
(广东工业大学,广州 510006)
双馈风力发电机转子电流滑模变结构观测器运行研究
钟泽航,杨俊华
(广东工业大学,广州 510006)
传感器故障下,为实现海上双馈风电系统的重构控制和不间断运行,需要精确的转子电流观测信号,研究参数鲁棒性好、动态响应速度快的转子电流状态观测策略。在分析同步坐标系下双馈风力发电机数学模型基础上变换电机模型,选取定子电流为状态向量;通过控制定子电流估计值的偏差,设计滑模控制器,跟踪定子电流;系统进入滑动模态后,通过低通滤波器滤波,去除控制器输出信号中的高频失真信号,获得转子电流观测值。基于PSCAD/EMTDC仿真平台,搭建双馈电机滑模观测器矢量控制系统模型。仿真结果表明,该观测器估算方法能够快速跟踪电机转子电流变化,并可在一定程度上抑制参数误差对电流观测精度的影响,算法简单、易实现。
双馈发电机;转子电流观测器;滑模变结构;重构控制;矢量控制
0 引 言
与陆地相比,海上风速高、湍流强度小、风速风向稳定,但海上风电系统的维护是制约海上风电发展的主要原因之一[1]。根据国家电力监管委员会公布的2010年风电系统故障分类统计数据显示,传感器故障率达9.4%,在各类部件中排第4位[2]。研究传感器故障下海上风电系统的状态观测与重构控制策略,实现故障期间的不间断运行,可提高系统可靠性、降低维护成本和增加有效发电时间。
根据能观性标准,文献[3]提出了双馈风电系统传感器故障监测、诊断和重构控制策略,但过度依赖于电流、电压、转速和位置精确观测结果。针对系统传感器故障、参数不确定性以及随时间变化的未知输入等问题,文献[4]提出一种专用模糊观察器(FDOS)方案,但需构造线性矩阵不等式(LMI),其设计方法较复杂,不利于系统实现。文献[5]提出了一种电流传感器容错控制方法,电流观测器以电压信号为输入,构建改进的电流传感器故障检测算法,并可考虑其自适应阈值和不同的故障持续时间。文献[6]将双馈发电机非线性模型中的系统矩阵简化为两个线性矩阵,设计双线性Luenberger电流观测器,实现对定、转子电流的观测,但要求定、转子电流全部可测,无法实现传感器故障下的电流观测和重构控制。为减小发电机参数变化对观测结果的影响,基于扩展卡尔曼滤波器方法,文献[7]设计了包含参数估计的电流观测策略,但滤波器收敛速度较慢,难以满足转子电流闭环控制对观测器动态响应速度的要求。文献[8]提出了一种FDI传感器系统设计方法,采用卡尔曼滤波器组设计多观测策略,检测多个传感器故障,提高风电系统稳定性,但该电流观测策略仅适于系统故障检测方面。
滑模变结构方法的一个重要研究方向是用来设计非线性观测器[9],为解决传感器故障诊断和重构问题,文献[10]设计了一类滑模观测器,应用H∞理论设计滑模运动,使得一个对故障重构的不确定性的影响上限将被最小化并应用于垂直起落飞机上。利用传统的常值切换滑模控制方法,文献[11]进行了反电动势观测器设计,实验结果表明,该观测器可较为准确地估算位置,对被控对象的参数摄动及扰动有较好的鲁棒性。文献[12-13]设计了一种滑模观测器用于估算电机转子位置和速度,仿真结果显示该观测器具有鲁棒性强、动态响应快等特点。
为提高观测器的鲁棒性和动态响应速度,本文提出双馈电机转子电流滑模变结构观测方案,应用滑模变结构控制理论,设计定子电流滑模跟踪控制器,通过控制定子电流估计值的偏差实现转子电流观测。为双馈型风电系统在传感器故障期间的重构控制和不间断运行提供精确的转子电流观测信号,有助于提高海上风力发电系统的运行可靠性。
1 双馈电机数学模型
采用发电机惯例,双馈电机在同步旋转坐标系下的数学模型[14]的电压方程:
(1)
磁链方程:
(2)
式中:uds,uqs,udr,uqr为定转子绕组的d,q轴电压;ids,iqs,idr,iqr为定转子绕组的d,q轴电流;ψds,ψqs,ψdr,ψqr为定转子绕组的d,q轴磁链;Ls,Lr为dq坐标系中等效的两相定转子绕组自感;Lm为等效定,转子绕组间的互感;rs,rr为定转子电枢绕组电阻;ω1,ωr为d,q轴系统及转子的旋转角速度;p=d/dt为微分算子。
2 状态方程变换
令
(3)
及
(4)
将式(2)代入式(4),并根据式(3)整理:
(5)
令:
(6)
将式(1)代入式(6)并结合式(3)和(4)整理得:
(7)
将式(5)代入式(7)有:
(8)
(9)
整理式(9)可得:
(10)
将式(10)代入式(8)并简化:
(11)
选择定子d、q轴电流为状态变量,整理式(11):
(12)
(13)
3 滑模观测器设计
采用恒定误差反馈增益的全阶观测器,虽可实现传统观测,但系统参数矩阵及扰动量变化较大时,其观测值存在较大误差。而滑模变结构控制策略,对参数变化、建模误差及外部干扰等不确定性有较强鲁棒性。设计滑模观测器控制定子电流估计值偏差,可观测双馈电机转子电流,并能有效抑制由双馈电机运行所引起的系统参数变化及各种扰动的影响,保证状态观测精度,动态响应速度较快。滑模观测器的结构如图1所示。

图1 滑模观测器结构
定义滑模观测器的滑模面:
(14)
根据双馈电机在同步旋转坐标系下的数学模型,由式(12)和(13)可构造如下滑模观测器:
(15)
(16)

(17)
式中:kd,kq为滑模增益。sign(x)为符号函数:x>0,sign(x)=1;x <0,sign(x)=-1。由式(12)~式(17)可得:
(18)
(19)
定子电流误差开关信号中包含有转子电流信息,但滑模过程存在不连续性,开关切换会引入高频信号,使式(19)中的转子电流存在失真,可选用一类低通滤波器,只要其截止频率足够高,去除控制器输出信号中的高频失真信号,进而获得转子电流的观测值:
(20)
式中:ωc为低通滤波器的截止频率,则有:
(21)
根据式(21)解得:
(22)
由式(20)可知,通过低通滤波器可获得转子电流,但存在相位延迟,这与低通滤波器的相位响应直接相关,其截止频率越低,对应固定频率的相延迟越大,可用式(23)计算。运行时对应的相移角Δθ:
(23)
4 滑模存在和稳定性证明

(24)
则Lyapunov函数V是正定的,对V求导得:
(25)
将式(18)代入式(25)得:
(26)

(27)
根据系统仿真电机数据,可计算:
(28)
由式(27)、式(28)求解得:
(29)
所以,只要选取合适的kd,kq,即可保证滑模存在,系统能够到达滑模面,且渐进稳定。
5 仿真验证
仿真采用双馈风力发电系统,其转子侧变换器运用磁链定向矢量控制技术,实现有功功率和无功功率的解耦,电流控制采用滞环电流PWM控制方案。网侧变换器釆用电网电压定向矢量控制技术,并由此构建电流内环、电压外环的双闭环PI-SVPWM控制系统。建立了PSCAD/EMTDC仿真实验平台。
由图2与图3可知,滑模观测器控制的定子电流估计值能够快速地收敛于真实值,为实现转子电流观测做好准备。


图2 滑动模态曲线图

(a) d轴电流

(b) q轴电流图3 定子d,q轴电流估计值与实际值的比较



图4 总运行时段的转子电流仿真波形
由图5可知,系统启动时,电机转子电流有少许波动并在短时间内进入稳定运行状态,此时电流观测器能很快跟踪上实际转子电流变化。

图5 系统启动时的转子电流波形
双馈风力发电系统在0.5 s时由转速控制切换为转矩控制,图6给出了该工况下的双馈电机转子电流的实际值与观测值变化曲线,跟踪良好。

图6 电机切换控制方式时的转子电流波形
如图7所示,在0.5 s处,双馈电机切换为转矩控制,之后在整个运行阶段电机转速均在变化,但可看出,该工况下转子电流仍能获得良好的快速跟踪,以下为系统正常运行时电机转子电流实际值及其观测值在电机变转速下的详细波形图。


图7 电机转速变化时对应电流波形
图8~图10是各时间段内双馈电机转子电流观测值与实际值的对比图,在双馈电机转子电流出现变化时,转子电流观测值均能小误差地快速跟踪实际值变化,由此验证了双馈电机转子电流滑模变结构观测策略的可行性。

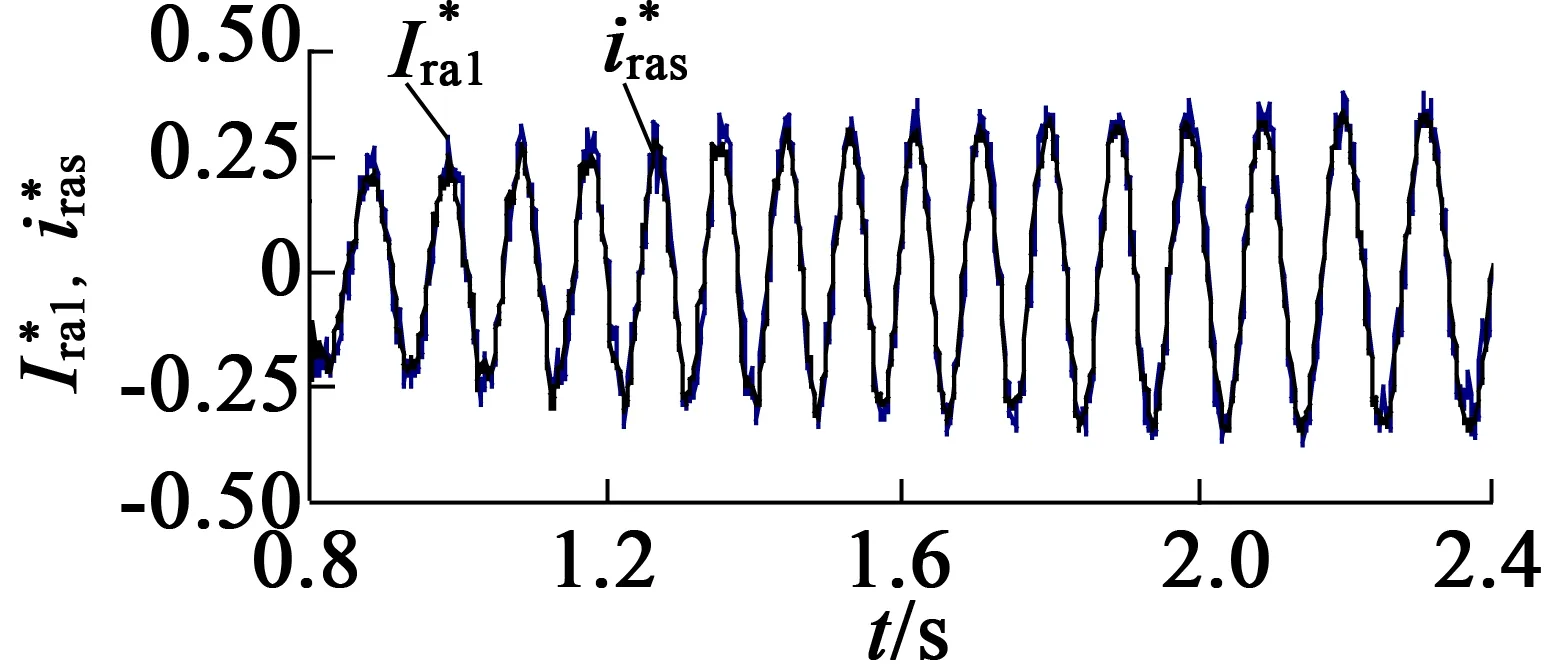
图8 0.8~2.4 s的转子电流实际值与观测值


图9 2.0~3.0 s的转子电流实际值与观测值

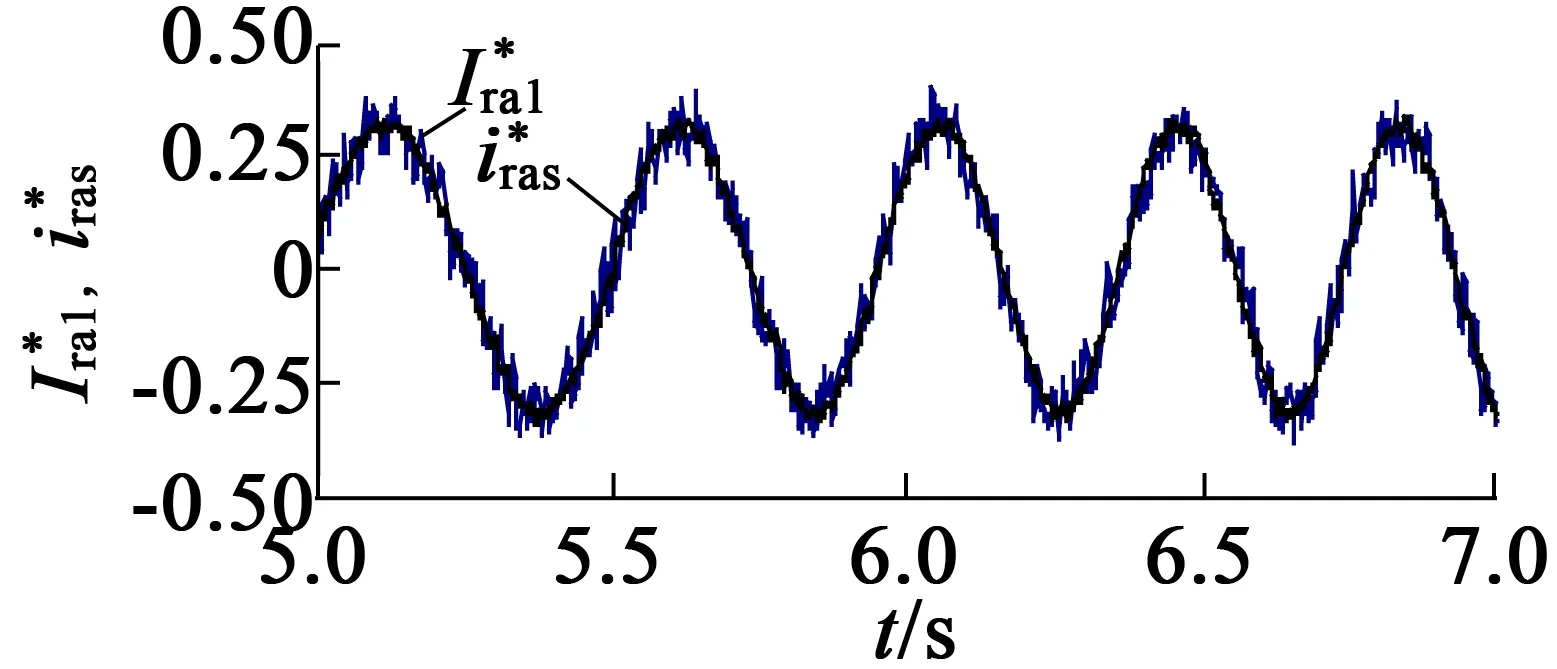
图10 5.0~7.0 s的转子电流实际值与观测值
6 结 论
本文提出了一种基于滑模变结构的双馈电机转子电流观测方法,设计转子电流滑模状态观测器,采用李亚普诺夫理论证明了该算法的收敛性。在PSCAD/EMTDC仿真环境下搭建了其系统模型,仿真结果表明双馈电机稳定运行时滑模观测器可以对转子电流进行正确的估算,能够快速跟随电流的变化,具有较强的鲁棒性,为传感器故障下的系统重构控制和不间断运行奠定了基础。
[1] 林鹤云,郭玉敬,孙蓓蓓,等.海上风电的若干关键技术综述 [J].东南大学学报(自然科学版),2011,41(4):882-888.
[2] 国家电力监管委员会.风电安全监管报告(2011第4 号)[R].北京:电监会办公厅,2011.
[3]ROTHENHAGENK,FUCHSFW.Doublyfedinductiongeneratormodel-basedsensorfaultdetectionandcontrolloopreconfiguration[J].IEEETransactionsonIndustrialElectronics, 2009,56(10):4229-4238.
[4]KAMALE,AITOUCHEA.RobustfaulttolerantcontrolofDFIGwindenergysystemswithunknowninputs[J].RenewableEnergy,2013(56):2-15.
[5]LIH,YANGC,HUYG.Fault-tolerantcontrolforcurrentsensorsofdoublyfedinductiongeneratorsbasedonanimprovedfaultdetectionmethod[J].Measurement, 2014,47(1):929-937.
[6]ROTHENHAGENK,FUCHSFW.Currentsensorfaultdetectionbybilinearobserverforadoublyfedinductiongenerator[C] // 32ndIEEEAnnualConferenceonIndustrialElectronics,Paris,France.IEEE,2006:1369-1374.
[7]MANUELGC,MICHELK.Sensorfaultdetectionandisolationindoubly-fedinductiongeneratorsaccountingforparametervariations[J].RenewableEnergy,2011,36(5): 1447-1457.
[8]SARAVANAKUMARAR,MANIMOZHIM,KOTHARIDP.SimulationofsensorfaultdiagnosisforwindturbinegeneratorsDFIGandPMSMusingKalmanfilter[J].EnergyProcedia, 2014,54:494-505.
[9]YUXH,XUJX,Ed.Variablestructuresystems:towardsthe21thCentury[M].BerlinHeidelberg:Spring-Verlag, 2002.
[10]TANCP,EDWARDSC.Slidingmodeobserversforrobustdetectionandreconstructionofactuatorandsensorfaults[J].InternationalJournalofRobustandNonlinearControl,2003, 13(5):443-463.
[11] 吴春华,陈国呈,孙承波.基于滑模观测器的无传感器永磁同步电机矢量控制系统 [J].电工电能新技术,2006, 25(2):1-3.
[12] 鲁文其,黄文新,胡育文.永磁同步电动机新型滑模观测器无传感器控制 [J].控制理论与应用,2009,26(4):429- 432.
[13] 苏健勇,李铁才,杨贵杰.PMSM无位置传感器控制中数字滑模观测器抖振现象分析与抑制 [J].电工技术学报, 2009,24(8):58-64.
[14] 赵栋利,许洪华,赵斌,等.变速恒频风力双馈发电机并网电压控制研究 [J].太阳能学报,2004,25(5): 587-59.
[15] 王丰尧,滑模变结构控制[M].北京:机械工业出版社,1995.
[16] 杨淑英,张兴,张崇巍.基于转子电流偏差角的双馈感应电机速度观测 [J].电力系统自动化,2009,33(4):92-95.
[17] 朱自芳,李先祥,皮佑国.永磁同步电机无位置传感器的滑模观测器设计 [J].微特电机,2008,36(3): 29-32.
[18]ELBULUKM,LIChangsheng.Slidingmodeobserverforwide-speedsensorlesscontrolofPMSMdrive[C]//38thIASAnnualMeetingConference,USA.IEEE,2003:480-485.
[19]ZHENGYH,FATTAHHAA,LOPAROKA.Non-linearadaptiveslidingmodeobserver-controllerschemeforinductionmotors[J].InternationalJournalofAdaptiveControlandSignalProcessing,2000,14(3):245-273.
[20]LEESS,PARKJK.Designofpowersystemstabilizerusingobserver/slidingmode,observer/slidingmode-modelfollowingandH/slidingmodecontrollersforsmall-signalstabilitystudy[J].InternationalJournalofElectricalPower&EnergySystems,1998,20(8):543-553.
[21] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究 [J].中国电机工程学报, 2007,27(3):24-27.
[22] 黄晟,廖武,黄科元.双馈风力发电系统无速度传感器控制 [J].电气传动,2010,40(3):3-5.
[23] 刘丛伟,李崇坚,苏鹏声.双馈电机无速度传感矢量控制调速系统的研究 [J].清华大学学报(自然科学版),1999, 39(5):54-57.
Operation of DFIG Rotor Current Observer Based on Sliding Mode Variable Structure Controller
ZHONGZe-hang,YANGJun-hua
(Guangdong University of Technology,Guangzhou 510006,China)
To realize reconfiguration control and continuous operation of the offshore doubly-fed wind generator systems, the accurate observation of rotor current signals must be provided under sensor fault. The observation strategy of rotor current status was studied with strong robustness of parameters and fast dynamic response. The mathematical model of DFIG was transformed to select the stator currents as state vectors by analyzing the machine model in synchronous coordinate. The sliding controller was designed to track stator current though regulating the bias of the estimated value of the stator current. The high frequency distortion section of the controller's output signal was removed through a low pass filter to obtain rotor current observation value as the system entered the sliding mode. The simulation model of DFIG vector control system with a sliding mode observer was built in PSCAD/EMTDC simulation environment. The results of simulation show that the changes in the rotor current of DFIG can be quickly tracked in this observer estimation method, and the parameter errors' influence on the accuracy of current observation value is repressed. The algorithm is simple and easy to implement.
doubly-fed induction generator; rotor current observer; sliding mode variable structure control; reconfiguration control; vector control
2015-08-31
国家自然科学基金项目 (51307025,51117050, 51407035); 广东省高等学校科技创新项目(2013KJCX0059);广东高校优秀青年创新人才培养计划项目资助(2013LYM_0019)
TM315
A
1004-7018(2016)07-0072-05
钟泽航(1991-),男,硕士研究生,研究方向为风力发电机控制。