海洋动能发电装置在水下探测航行器的安装位置对发电性能的影响
2016-12-20丁文俊宋保维毛昭勇王科燕
丁文俊,宋保维,毛昭勇,王科燕
(1.西北工业大学航海学院,710072,西安;2.西北工业大学水下航行器研究所,710072,西安)
海洋动能发电装置在水下探测航行器的安装位置对发电性能的影响
丁文俊1,2,宋保维1,2,毛昭勇1,2,王科燕1
(1.西北工业大学航海学院,710072,西安;2.西北工业大学水下航行器研究所,710072,西安)
为了研究海洋动能发电装置在水下探测航行器中的安装位置对其发电性能的影响,根据拉格朗日方程建立了水下探测航行器与晃动摆的耦合非线性运动方程,在不同的阻尼系数和横摇激励频率下,采用龙格库塔方法分别对海洋动能发电装置安装位置对发电性能的影响进行了数值分析。研究结果表明:海洋动能发电装置的安装距离(晃动摆的摆动中心到航行器质心的距离)为零时,在横摇固有频率激励下,系统收集能量为零;安装距离不为零时,能量收集系统在固有频率附近呈现振动系统所有的特性;收集的功率与安装距离为二次方关系,且在不同频率时,在安装距离为零附近都有一零功率点,说明发电装置安装距离应尽量避免为零,且这一安装位置与阻尼系数无关,而与频率有关。研究结果将为后期海洋动能发电装置的安装布放提供借鉴。
海洋动能;水下探测航行器;能量收集;永磁发电机;摆式能量收集装置
水下探测航行器是一种能够自主航行至预定地点,然后锚系于海底,进行数据采集、环境监测等任务的无人任务控制器。水下探测航行器上的探测传感电子设备的常规能源供给为电池,然而水下探测航行器受体积和质量的限制,所携带的电池能源有限,因此水下探测航行器的探测任务时间一般不长。
为了延长水下探测航行器的服务年限,需对水下探测航行器进行能源补给。海洋中蕴藏有储量巨大的可再生能源[1],而水下探测航行器锚系于海底时常受到海流、潮汐等影响,时刻处于晃动状态。这种由于海洋环境引起的晃动能量简称为海洋动能。为了开发海洋动能,国内外相关研究机构与学者已对海洋动能发电技术展开了相关研究。Mccabe等研究了该团队于20世纪90年代发明的内滑块式晃动发电系统Frog与PS Frog[2];Clement等设计了SEAREV海洋晃动发电装置,采用液压输出系统,其功率可达500~1 000 W[3-4];Bracco等利用陀螺效应发明了惯性波能发电装置ISWEC[5-6];Mitcheson等研究了应用于水面无人航行器的摆式惯性波能收集装置[7]。在国内,张颖等研究了AUV用惯性摆式波能系统[8],但只进行了理论研究;王晓明等针对海洋机器人能源补给发明制作了二自由度波能转换装置[9];邓启平等研究了水平摆式波能发电装置[10];丁文俊等研究了应用于水下探测航行器的海洋动能发电装置[11]。
然而,大部分研究集中在对海洋动能发电装置本身的发电性能优化及提高上,而对于安装位置对海洋动能发电装置发电性能的影响少有研究。为了探究海洋动能发电装置在水下探测航行器中的安装位置对发电性能的影响,本文开展了相关研究。
1 海洋动能发电装置设计
所设计的水下探测航行器海洋动能发电装置主要由晃动摆和永磁发电机组成,如图1所示。该装置只包括能量收集和能量转化环节,去掉了一般发电装置的中间能量传递环节[12]。本文设计的海洋动能发电装置中,晃动摆直接与稀土永磁发电机转子相连,并将稀土永磁发电机直接与水下探测航行器固连。当水下探测航行器受到外界扰动时,晃动摆在外界扰动激励下,直接带动发电机转子运动[13-14]。
海洋动能发电装置的主要参数如表1所示,主要通过晃动摆的惯性作用收集海洋动能。水下探测航行器在海洋动能的扰动下产生晃动,晃动摆由于惯性作用产生与水下探测航行器的相对运动,从而带动永磁发电机转子旋转,切割永磁发电机的线圈绕组,使之产生感应电动势[13]。
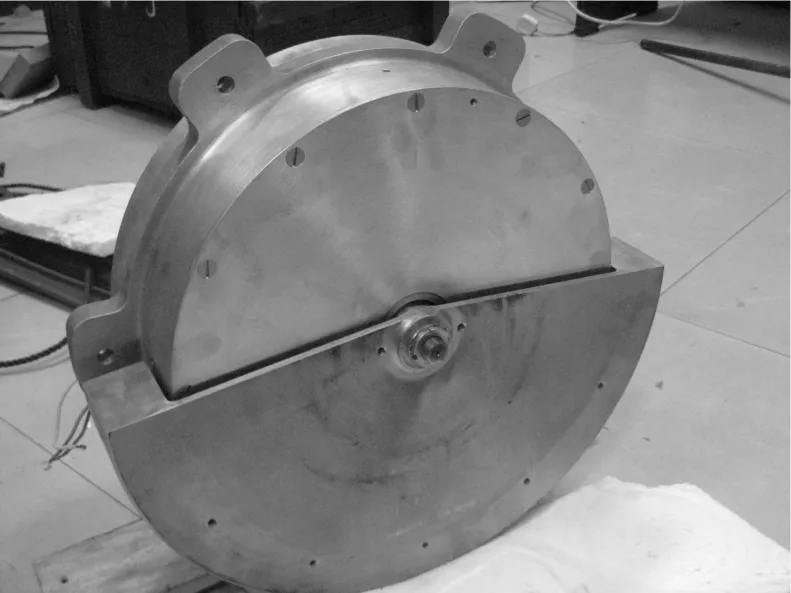
图1 海洋动能发电装置结构图[13]
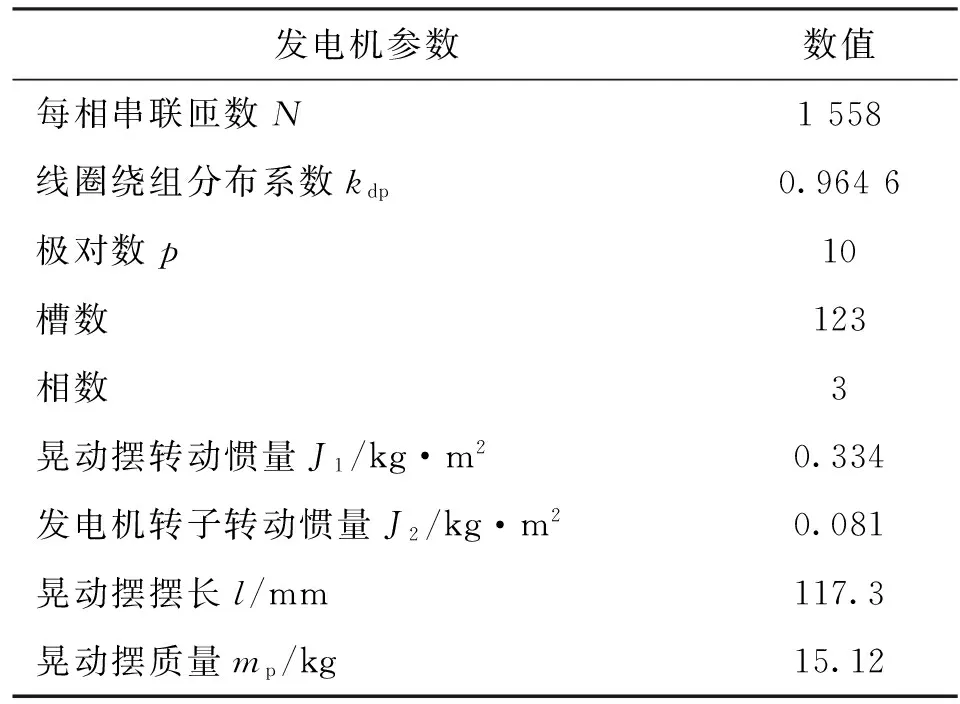
发电机参数数值每相串联匝数N1558线圈绕组分布系数kdp0.9646极对数p10槽数123相数3晃动摆转动惯量J1/kg·m20.334发电机转子转动惯量J2/kg·m20.081晃动摆摆长l/mm117.3晃动摆质量mp/kg15.12
2 海洋动能发电装置的数学模型
假设入射扰动为二维扰动,根据海洋动能发电装置的结构,对整个系统的受力情况进行二维简化后的力学模型如图2所示,数学模型坐标系如图3所示,系统中晃动摆被简化为一个质点,同时水下探测航行器在海洋环境扰动下的诱导运动被当作系统的参数激励。根据拉格朗日方程,推导得到晃动摆的动力学非线性控制方程[12-14]为
(1)
线性系统固有圆频率为
ωn=(mpgl/(Ip+mpl2))1/2
(2)
则线性系统固有频率为
fn=ωn/2π=(mpgl/(Ip+mpl2))1/2/2π=
0.84Hz
式中:x、z、θ分别为水下探测航行器的横向位移、垂向位移及角位移;γ为晃动摆与水下探测航行器的相对角位移,海洋动能发电装置的发电性能主要取决于γ[12-14];Ip为晃动摆和发电机转子的转动惯量,Ip=J1+J2;mp为晃动摆的质量;d为晃动摆的摆动旋转中心点到水下探测航行器质心的距离。为了分析d对发电性能的影响,本文忽略机械阻尼及发电机内阻对能量收集的影响,并假设电磁阻矩为一线性黏性阻尼器[12-14]。
一个激励周期内的发电系统的平均发电功率可表示为
(3)
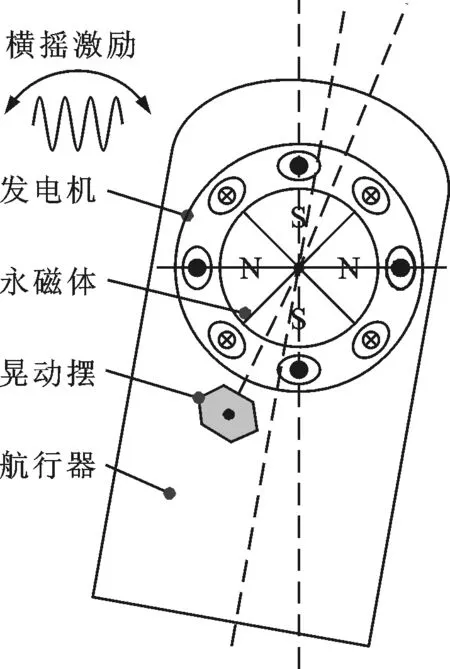
图2 海洋动能发电装置示意简图
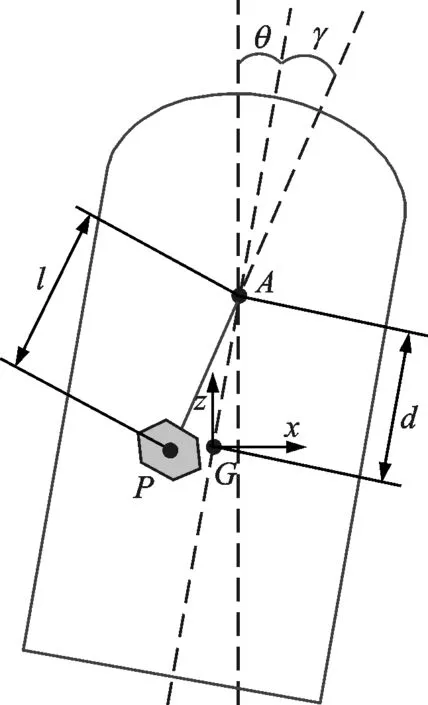
图3 数学模型坐标系
3 安装位置对发电性能影响分析
从式(1)分析可知,安装距离d只有在横摇激励下会对发电性能产生影响,因此本文重点分析在横摇激励下的发电性能,同时忽略横荡及垂荡对发电系统的影响,并假设横摇的激励方程为
θ=Θsin(2πft)
(4)
式中:Θ为横摇激励幅度;f为横摇激励频率。
为了探索安装位置对发电性能直接影响的机理,假设横摇激励为小幅摆动时,线性简化系统在一个激励周期内发电系统的平均发电功率可表示为
(f/fn)2)2+(2ζf/fn)2
(5)
ζ=C/2(Ip+mpl2)ωn
(6)
由式(5)可知,安装距离d对发电功率P有直接影响,即安装位置对系统的发电性能有直接影响,而在不同的阻尼系数C和横摇激励频率f下,所呈现的影响又有所不同。
因此,为了进一步研究安装位置对系统发电性能的影响规律,本文通过MATLAB中的四阶龙格库塔方法数值求解非线性式(1)、(3),分别分析不同的阻尼系数C和横摇激励频率f下,安装位置对发电性能的影响。
3.1 数值计算方法验证
为了验证建立的数学模型及数值求解结果的准确性,本文采用多体动力学软件对本文研究的海洋动能发电装置模型在一定的参数下进行动力学仿真,并将结果与MATLAB中的四阶龙格库塔方法数值求解结果进行对比,结果如图4所示。
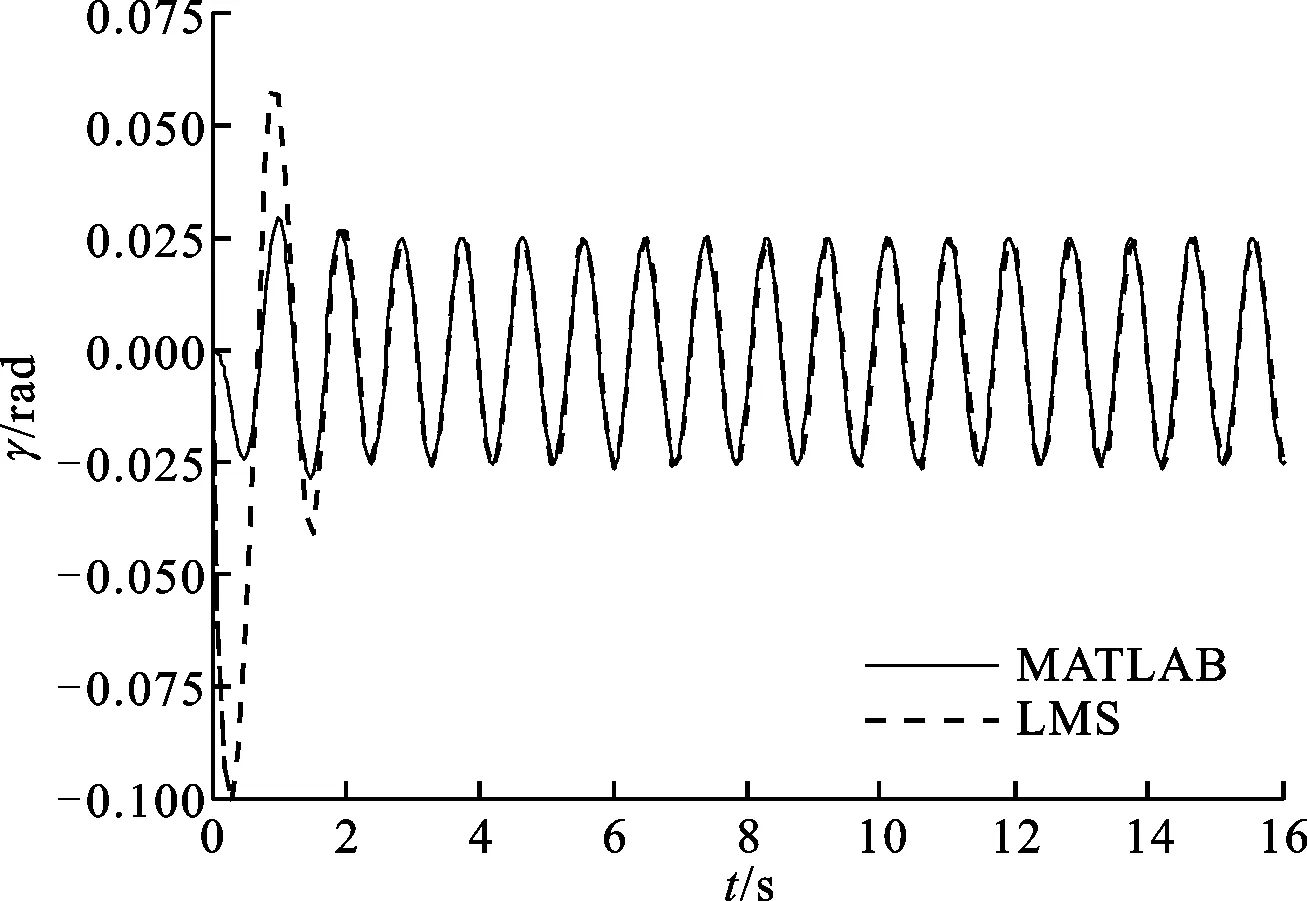
图4 LMS与MATLAB的结果对比
假设海洋动能发电装置在水下探测航行器中的安装距离d为0.2 m,激励频率f为1.1 Hz,激励幅度Θ为6°,阻尼系数为2 N·m·s/rad。
从图4中分析可知,在相同模型参数及相同的激励参数下,MATLAB中的四阶龙格库塔方法数值求解与多体动力学软件LMS Virtual.Lab Motion求解得到的晃动摆摆动响应结果相同,从而可知建立的数学模型正确。
3.2 不同阻尼系数下的影响
为了研究在不同阻尼系数下不同安装位置对发电性能的影响,本文进行了在激励幅度Θ为6°时的相关数值模拟,数值仿真结果如图5所示。
从图5中分析可知,在不同的安装位置时,不同阻尼系数对发电性能的影响大致趋势相同,但是一些细节地方对发电性能的影响却大不相同。
(a)d=0 m
(b)d=0.5 m
(c)d=1 m
(d)d=-0.5 m
(e)d=-1 m图5 不同安装位置在不同阻尼系数下对发电性能的影响
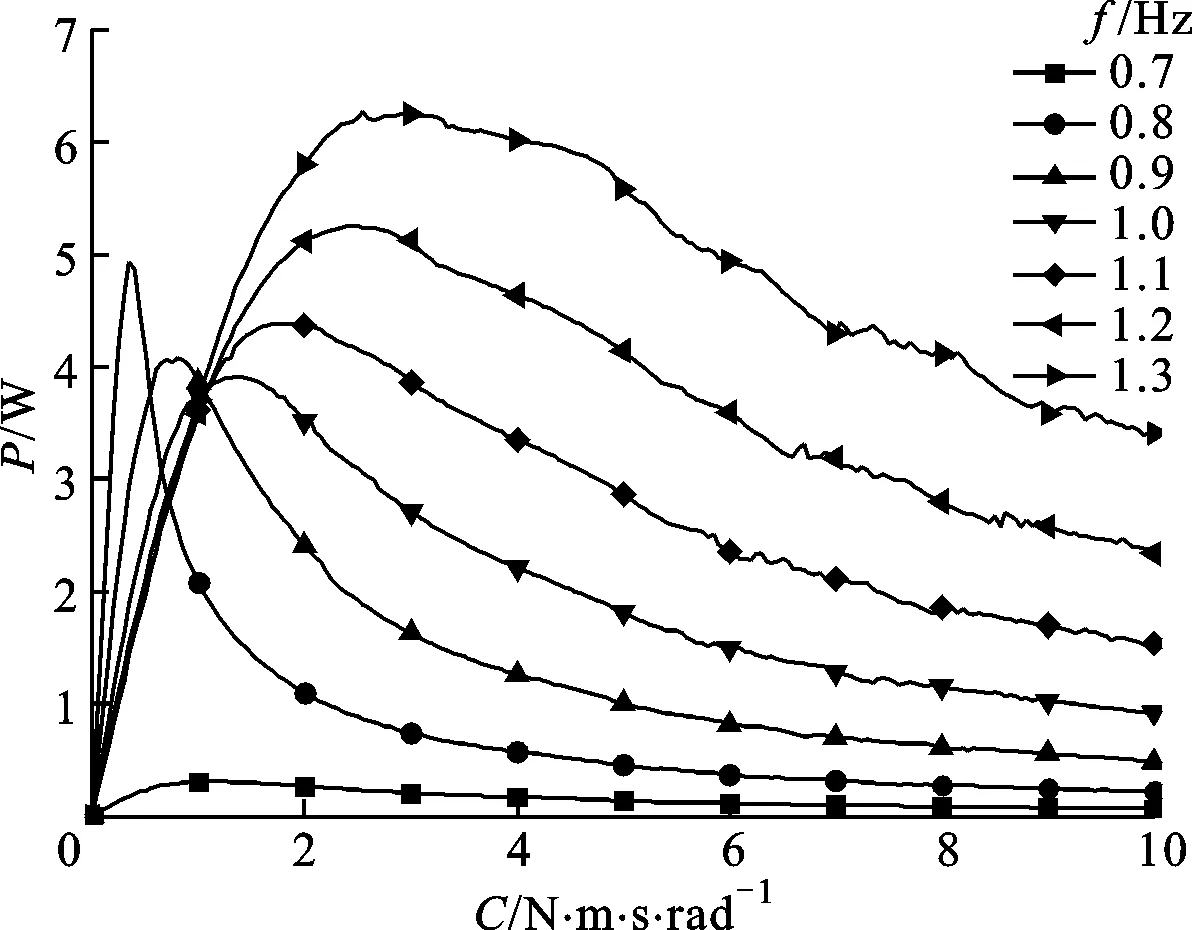
在安装距离d>0(即安装位置位于水下探测航行器质心的上方)时,从图5中分析可知,在阻尼系数0~2 N·m·s/rad的范围内,低频0.8~1 Hz下收集的能量高于高频1.1~1.3 Hz下收集的能量。
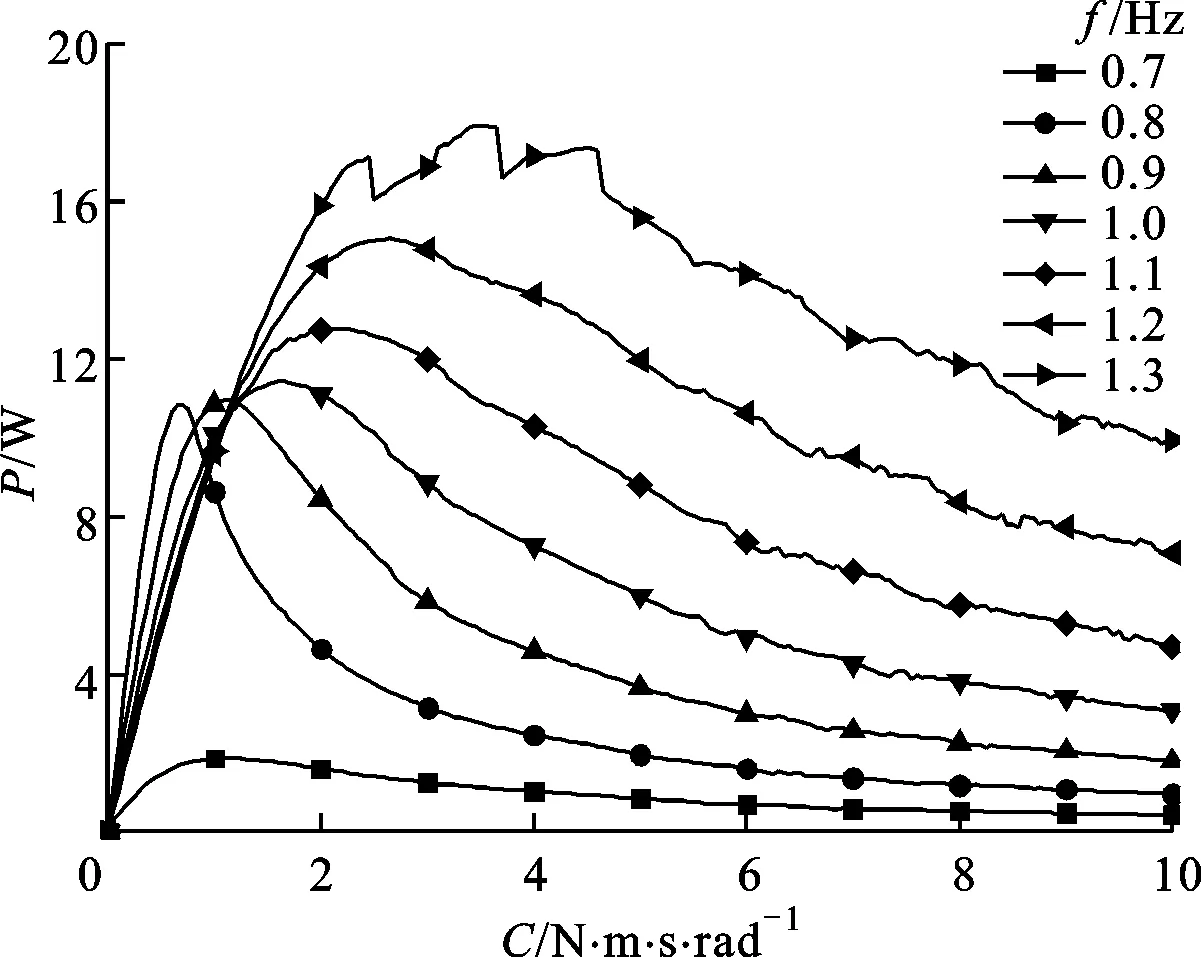
当安装距离d<0(即安装位置位于建立的水下探测航行器质心的下方)时,从图5中分析可知,基本上是频率越高,收集的能量越多。同时,在水下探测航行器质心上下对称的安装位置,安装位置d<0时,收集的能量比安装距离d>0时高。
3.3 不同频率下的影响
为了研究不同频率、不同安装位置对发电性能的影响,本文进行了在激励幅度Θ为6°时的相关数值模拟,数值仿真结果如图6所示。
(a)d=0 m

(b)d=0.5 m
(c)d=1 m
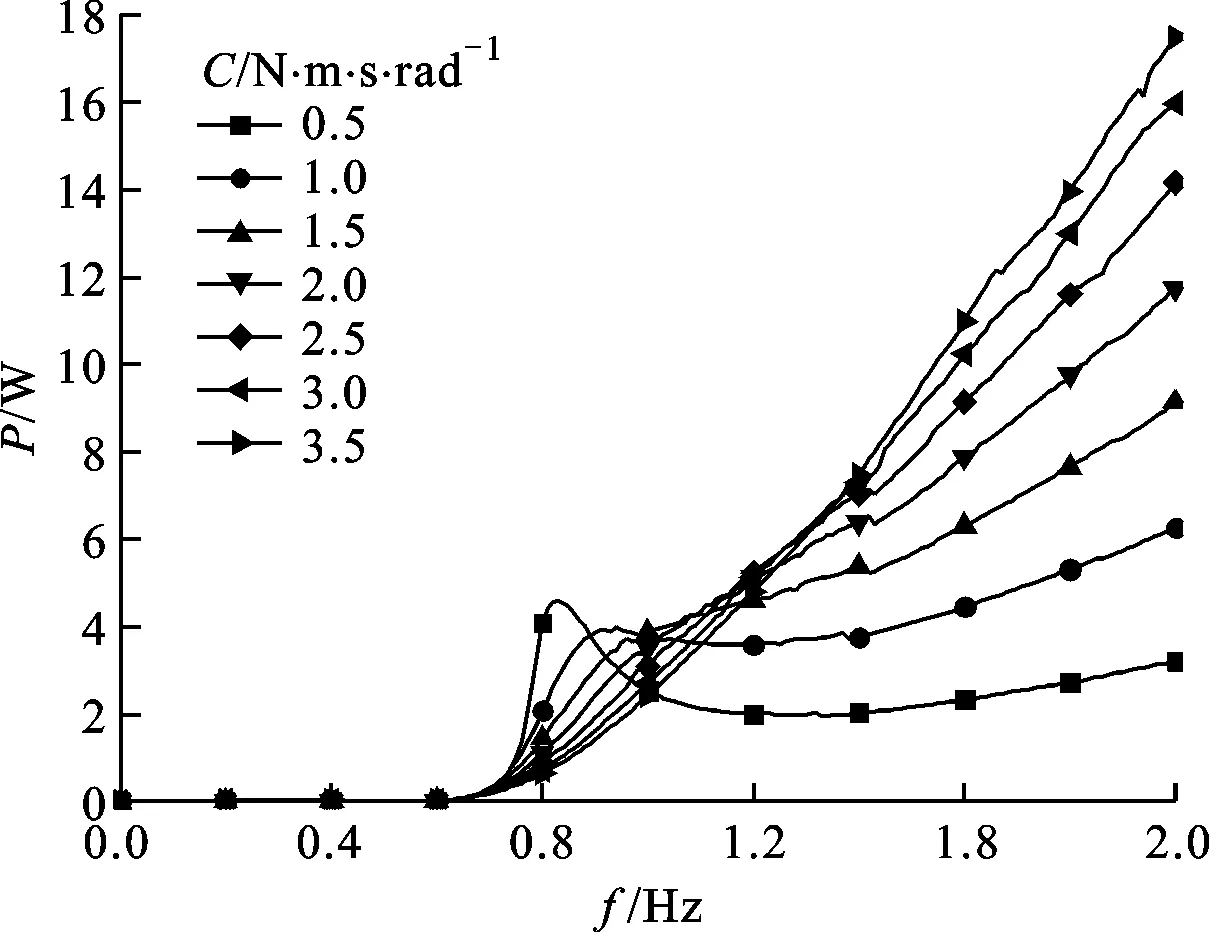
(d)d=-0.5 m
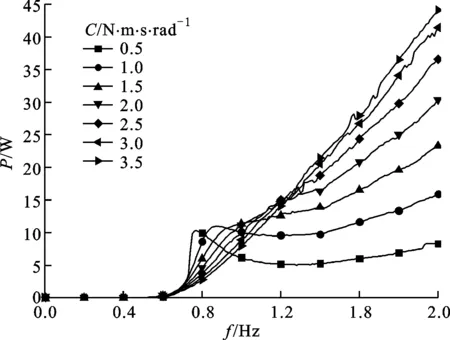
(e)d=-1 m图6 不同安装位置在不同频率下对发电性能的影响
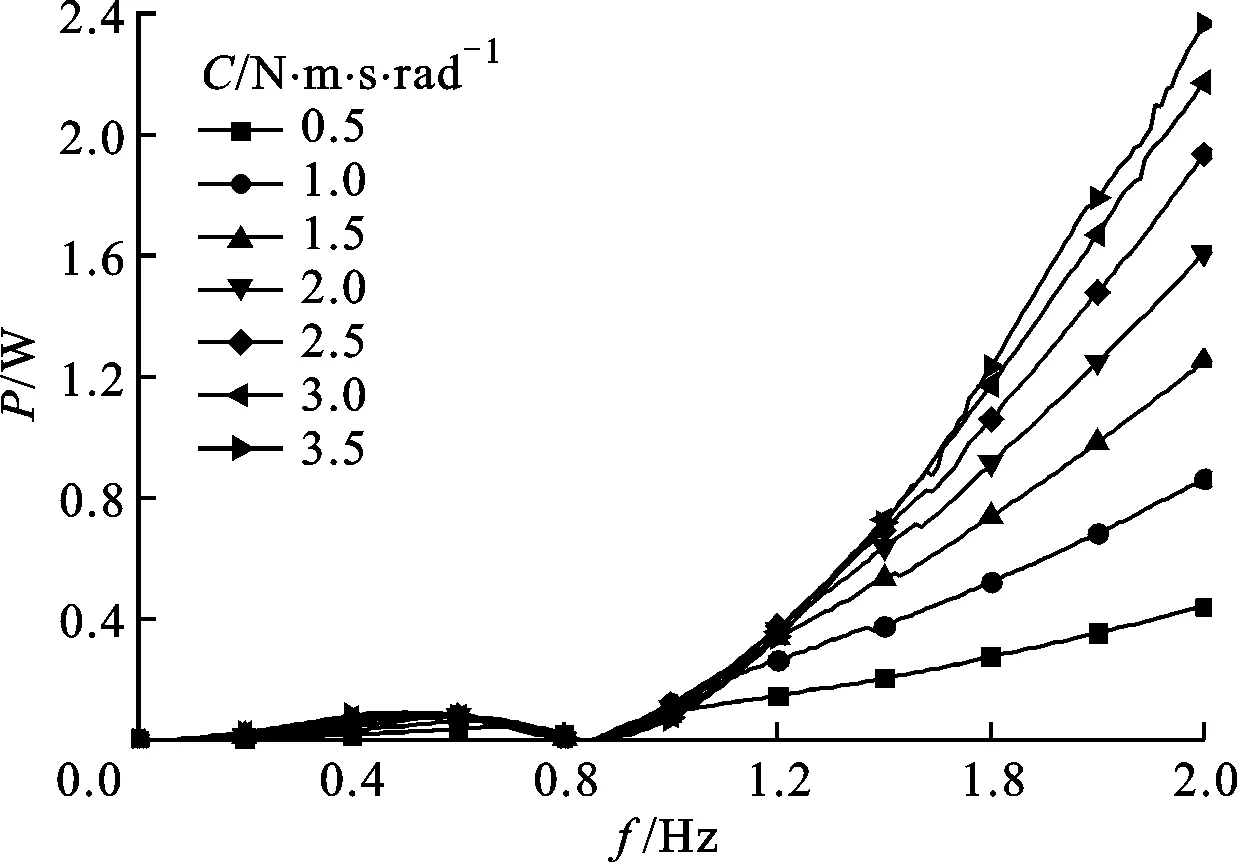
从图6中分析可知,在安装距离d为0时,在固有频率激励处,收集的能量为0。因此,当安装距离d为0时,为了提高能量收集,应当避开发电装置固有频率点。
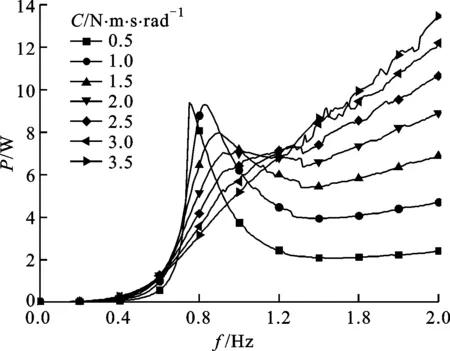
在安装距离d不为0时,当激励频率(0~0.6 Hz)小于固有频率时,收集的能量很小,基本为0;当激励频率(0.7~1 Hz)靠近固有频率时,收集的能量有较大的增加,同时在固有频率附近呈现振动系统所有的特性;而当激励频率大于固有频率1.2 Hz后,收集的能量随激励频率增大而增加。根据振动发电相关文献记载,一般振动能量收集系统运行在激励频率等于固有频率下,系统达到共振状态,收集能量达到最大值。本文研究发现,当海洋动能发电装置的安装位置与建立的坐标系原点较远时,激励频率高于固有频率时,同样能收集较多的能量。
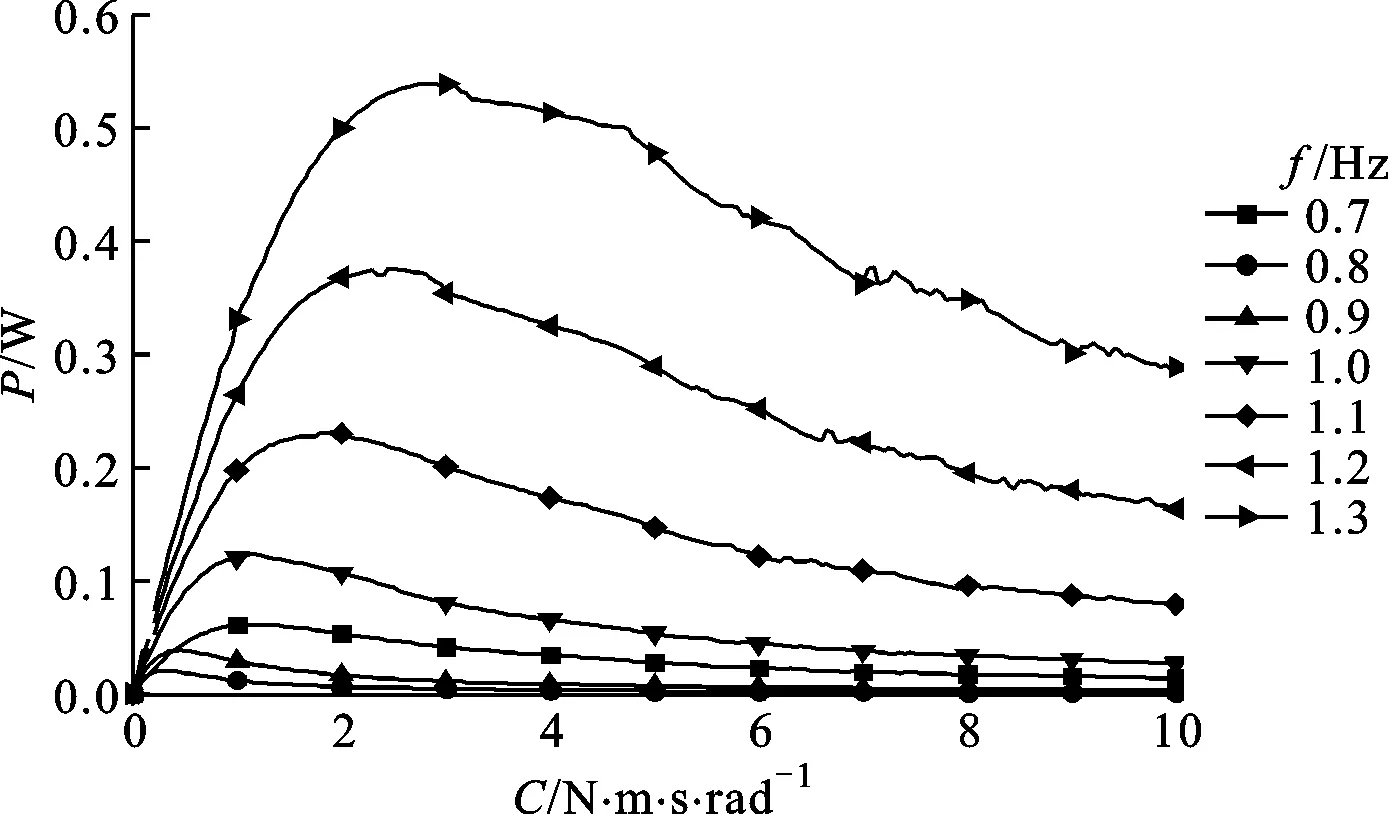
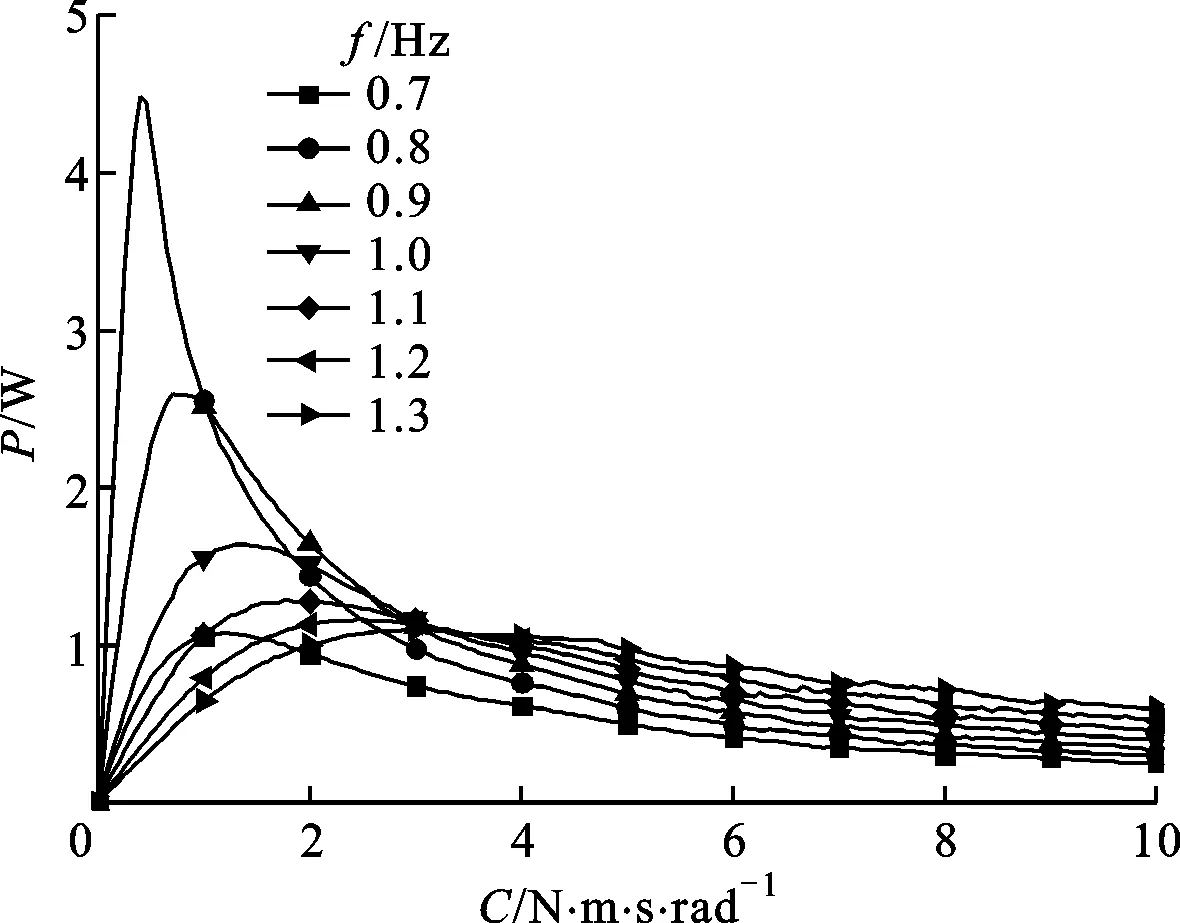
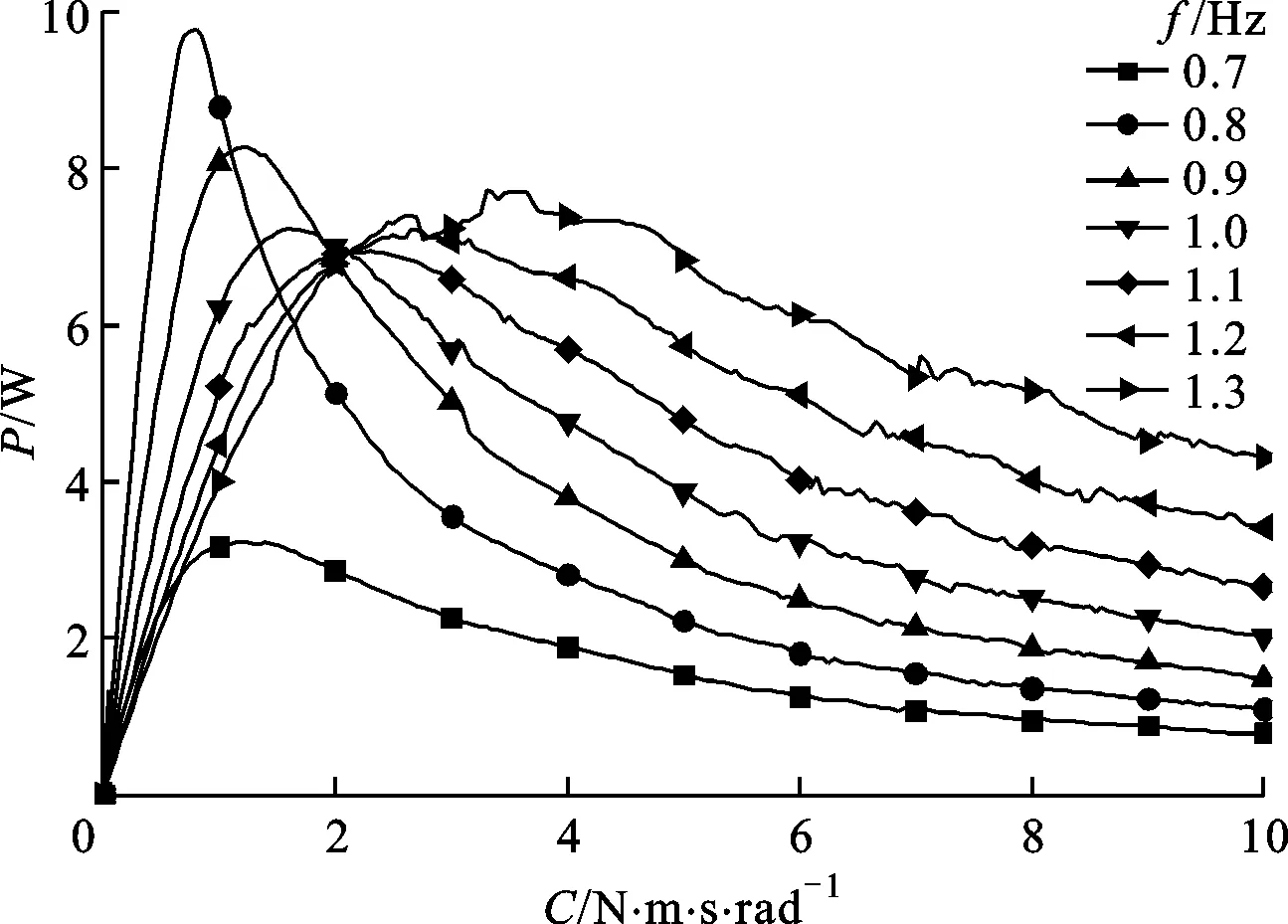
3.4 功率与安装位置的关系
为了研究能量收集功率与安装位置的关系,本文进行了在激励幅度Θ为6°时的相关数值模拟,数值仿真结果如图7所示。
从图7中分析可知:在不同频率时,都有一功率为0的安装位置,该安装位置的安装距离d>0;这一安装距离与阻尼系数无关,而与频率有关,频率越大,对应的零功率安装距离d越大。
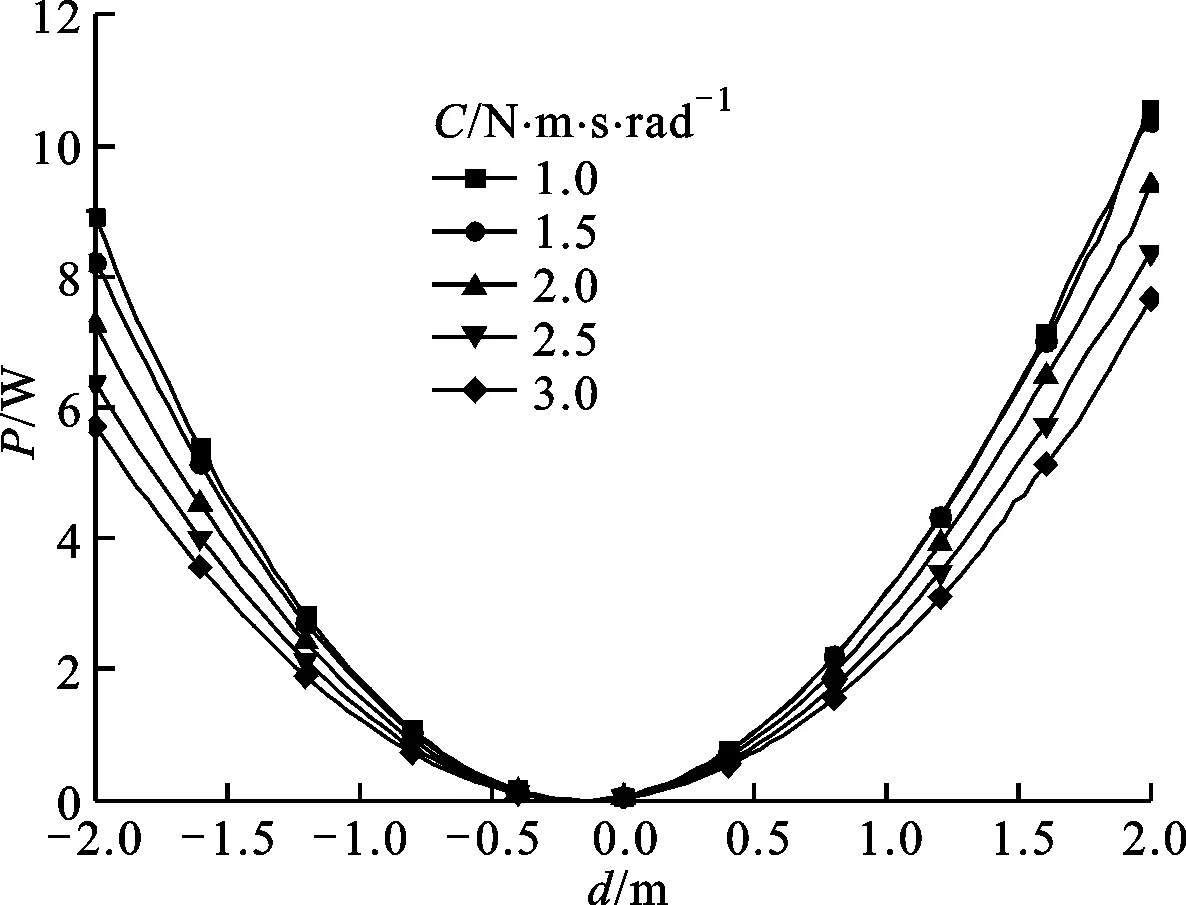
(a)f=0.7 Hz
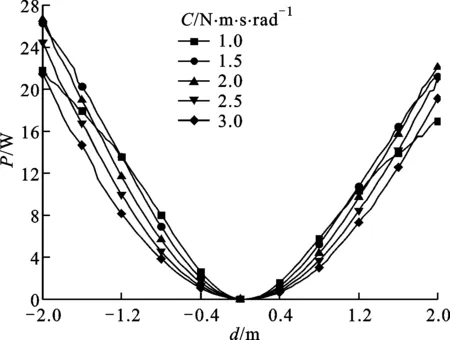
(b)f=0.9 Hz
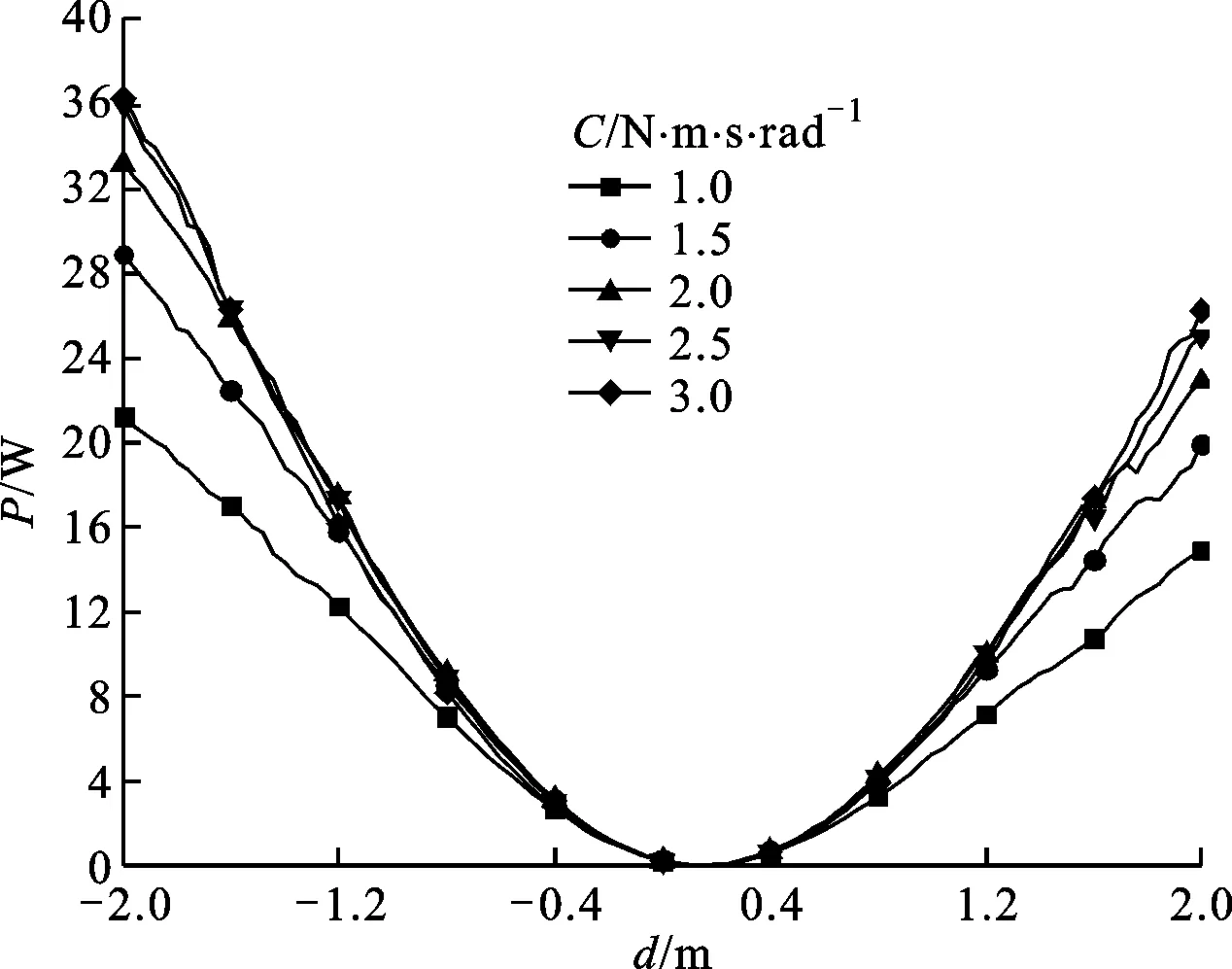
(c)f=1.1 Hz
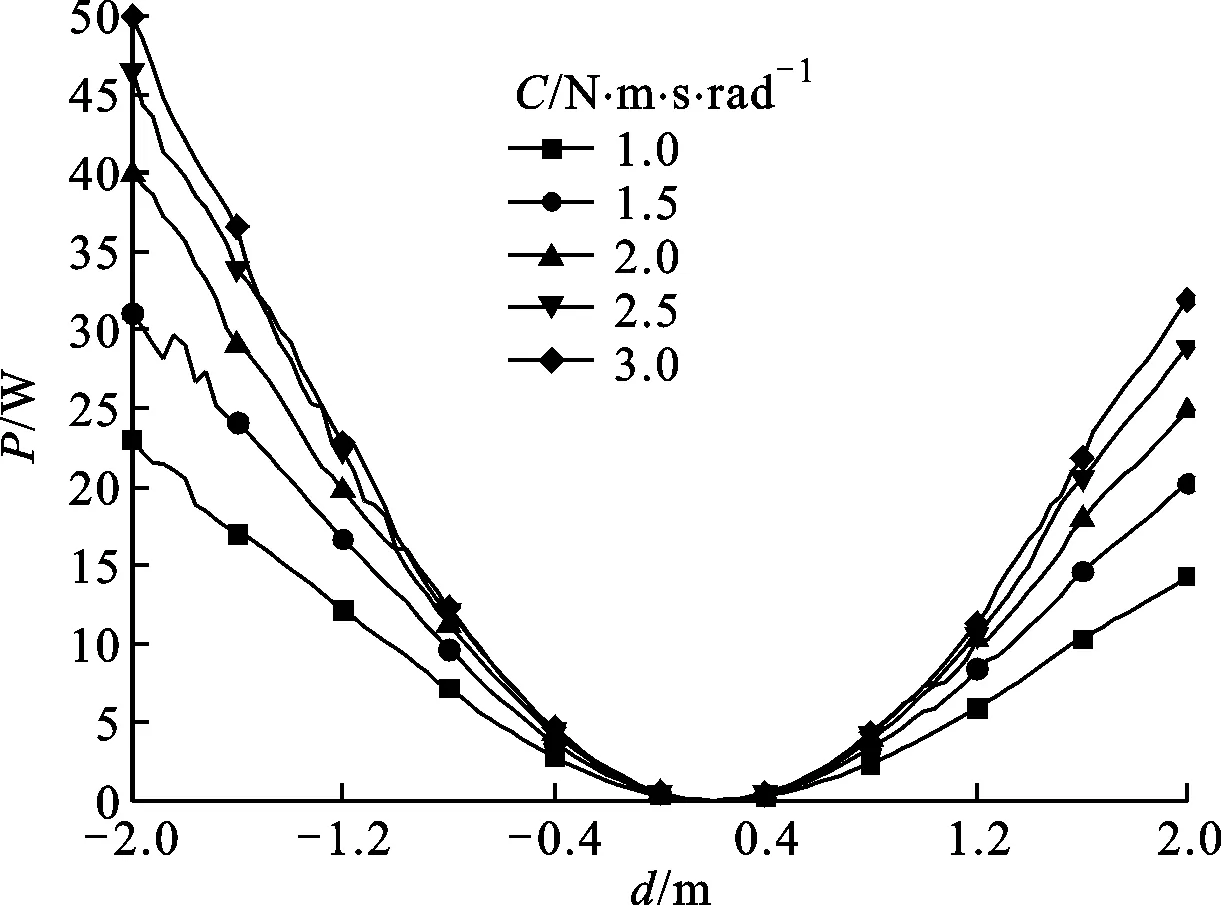
(d)f=1.3 Hz图7 不同频率下功率与安装位置的关系
功率与安装位置的关系曲线在不同频率、不同阻尼系数时,都是抛物线状,说明收集的能量与安装距离d呈二次方关系,且抛物线定点即零功率安装距离d在0附近,说明发电装置安装位置应尽量远离横摇的旋转中心。
4 结 论
本文主要研究了海洋动能发电装置安装位置对发电性能的影响,研究发现安装位置对海洋动能发电装置的发电性能有较大的影响,研究结果如下。
(1)在不同阻尼系数下,不同的安装位置对发电性能的影响大致趋势相同;当安装距离d>0时,在阻尼系数0~2 N·m·s/rad的范围内,低频0.8~1 Hz下收集的能量高于高频1.1~1.3 Hz下收集的能量;当安装距离d<0时,基本上是频率越高,收集的能量越多。
(2)在不同频率下,当安装距离d为0时,为了提高能量收集,应当避开发电装置固有频率点;当安装位置d不为0时,海洋动能发电装置在固有频率附近表现出振动系统所有的特性;当激励频率大于固有频率后,收集的能量随激励频率增大而增加。
(3)收集的功率与安装距离d为二次方关系,在不同频率时,都有一功率为0的安装距离d,该安装位置在0附近且大于0,说明发电装置安装位置应尽量远离横摇的旋转中心,且这一安装距离d与阻尼系数无关,而与频率有关,频率越大,该0功率安装距离d越大。
[1] MUELLER M, WALLACE R. Enabling science and technology for marine renewable energy [J]. Energy Policy, 2008, 36(12): 4376-4382.
[2] MCCABE A P, BRADSHAW A, MEADOWCROFT J A C, et al. Developments in the design of the PS Frog Mk 5 wave energy converter [J]. Renewable Energy, 2006, 31(2): 141-151.
[3] BABARIT A, CLEMENT A H, GILLOTEAUX J C. Optimization and time-domain simulation of the SEAREV wave energy converter [C]∥24th International Conference on Offshore Mechanics and Arctic Engineering. New York, USA: ASME, 2005: 703-712.
[4] MARIE R, HAMID B, BERNARD M, et al. Design methodology for a SEAREV wave energy converter [J]. IEEE Transactions on Energy Conversion, 2010, 25(3): 760-767.
[5] BRACCO G, GIORCELLI E, MATTIAZZO G. ISWEC: a gyroscopic mechanism for wave power exploitation [J]. Mechanism and Machine Theory, 2011, 46(10): 1411-1424.
[6] BRACCO G, GIORCELLI E, MATTIAZZO G. ISWEC: design of a prototype model with gyroscope [C]∥2009 International Conference on Clean Electrical Power. Piscataway, NJ, USA: IEEE, 2009: 57-63.
[7] MITCHESON P D, TOH T T, WONG K H, et al. Tuning the resonant frequency and damping of an electromagnetic energy harvester using power electronics [J]. IEEE Transactions on Circuits and Systems: II Express Briefs, 2011, 58(12): 792-796.
[8] 张颖, 董再励, 吴成东, 等. 基于惯性摆的波能系统研究 [J]. 太阳能学报, 2007, 28(4): 394-400. ZHANG Ying, DONG Zaili, WU Chengdong, et al. Research on the wave energy system based on inertial pendulum [J]. Acta Energy Solaris Sinica, 2007, 28(4): 394-400.
[9] WANG Xiaoming, SHANG Jianzhong, TANG Li, et al. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles [J]. Renewable and Sustainable Energy Reviews, 2012, 16(4): 1958-1970.
[10]宋洪侠, 邓启平, 姜恒甲, 等. 一种新型摆式波浪发电装置的研制 [J]. 可再生能源, 2014, 32(8): 1239-1244. SONG Hongxia, DENG Qiping, JIANG Hengjia, et al. Research and development on a novel pendulum wave energy converter [J]. Renewable Energy Resources, 2014, 32(8): 1239-1244.
[11]丁文俊, 宋保维, 毛昭勇, 等. 浅水域探测型无人水下航行器海洋动能发电装置特性研究 [J]. 西安交通大学学报, 2014, 48(4): 73-78. DING Wenjun, SONG Baowei, MAO Zhaoyong, et al. Research on characteristic of power generation device for detection UUV by ocean kinetic energy in shallow water [J]. Journal of Xi’an Jiaotong University, 2014, 48(4): 73-78.
[12]WATERS R, STÅLBERG M, DANIELSSON O, et al. Experimental results from sea trials of an offshore wave energy system [J]. Applied Physics Letters, 2007, 90(3): 034105.
[13]丁文俊, 宋保维, 毛昭勇, 等. 浅水域探测型UUV波浪能发电系统设计 [J]. 机械工程学报, 2015, 51(2): 141-147. DING Wenjun, SONG Baowei, MAO Zhaoyong, et al. Wave energy conversion system design for detection unmanned underwater vehicle in shallow water [J]. Journal of Mechanical Engineering, 2015, 51(2): 141-147.
[14]JOSSER C, BABARIT A, CLEMENT A H. A wave -to-wire model of the SEAREV wave energy converter [J]. Engineering for the Maritime Environment, 2007, 221(2): 81-93.
(编辑 赵炜 杜秀杰)
Influence of Installation Position of Ocean Kinetic Energy Converter on the Power Generating Performance in Underwater Detection Vehicles
DING Wenjun1,2,SONG Baowei1,2,MAO Zhaoyong1,2,WANG Keyan1
(1. School of Marine Science and technology, Northwestern Polytechnical University, Xi’an 710072, China; 2. Institute of Underwater Vehicle, Northwestern Polytechnical University, Xi’an 710072, China)
At different damping coefficients and rolling motion excitation frequencies, the influence of the installation position of ocean kinetic energy converter on the power generating performance in underwater detection vehicles is studied using the Runge-Kuta method according to the nonlinear coupled equation of the hull and rocking pendulum established by Lagrange equation. The numerical simulation results show that when the installation distance (from the rotating center of the rocking pendulum to the barycenter of the vehicle) of the ocean kinetic energy converter is zero, under the excitation of rolling motion, the harvested energy is zero; when the installation distance is not zero, energy harvesting system shows the characteristics of a vibration system near the natural frequencies. It is also shown that the harvested power has a square relationship with the installation distance. And at each different frequency, there is a zero power point near the zero installation distance, which shows that the installation distance of the ocean kinetic energy converter should not be equal to zero. The zero-power installation distance is related to the excitation frequency and has nothing to do with the damping coefficient. The research results can provide a reference for the installation and deployment of ocean kinetic energy converters.
ocean kinetic energy; underwater detection vehicles; energy harvest; permanent magnet generator; pendulum energy harvester
2015-05-16。 作者简介:丁文俊(1989—),男,博士生;宋保维(通信作者),男,教授,博士生导师。 基金项目:国家自然科学基金资助项目(51179159);国家“863计划”资助项目(2011AA8094401);西北工业大学博士论文创新基金资助项目(CX201405)。
10.7652/xjtuxb201601017
TK71;TJ61
A
0253-987X(2016)01-0108-07
