双站无源定位和跟踪算法研究
2016-12-20江利中谭姗姗
江利中,邹 波,谭姗姗
(上海无线电设备研究所,上海 200090)
双站无源定位和跟踪算法研究
江利中,邹 波,谭姗姗
(上海无线电设备研究所,上海 200090)
为提高无源定位和跟踪的性能,弥补传统技术信息量少、定位速度慢和跟踪精度低的缺陷,研究了针对空中目标的基于联合信号到达角(DOA)与到达时间差(TDOA)的双站无源定位算法,以及基于联合到达时间差与到达频率差(FDOA)的双站无源跟踪算法。无源定位算法利用空间几何关系解析目标位置,无源跟踪算法利用无色卡尔曼滤波(UKF)持续跟踪目标并获得更高精度的目标位置信息,给出了两种算法模型。仿真结果表明:联合DOA,TDOA的无源定位算法在基线较短的条件下,对距离100 km内的目标定位精度优于10%,联合TDOA,FDOA的无源跟踪算法的收敛速度较快且跟踪精度能达百米级。
双站; 无源定位; 无源跟踪; 到达角; 到达时间差; 到达频率差;空间几何关系; 无色卡尔曼滤波
0 引言
无源定位是观测站在自身不发射任何电磁波信号条件下,完全被动地接收辐射源目标的电磁波,根据这些电磁波的各项参数确定目标的位置和运动状态信息。与有源定位相比,无源定位的优势主要有:隐蔽性好;可获得远大于主动雷达的探测距离,能提早发现目标;系统成本较低。对对海作战的武器来说,无源定位制导技术能使武器尽早探测并发现海面远程空中目标、隐身目标等,提高武器系统在电子战环境中的生存与作战能力。根据观测站数量无源定位可分为单站无源定位和多站无源定位[1-2]。近年来快速发展的单站无源定位方法主要包括传统定位法和新型高精度定位法两类[3-7]。单站无源定位避免了时间同步和复杂的数据处理,具隐蔽性强、设备量小和系统相对独立等优点[2]。不同类型空中目标发射信号频率、信号形式各异,如美国E-3A预警机工作频率为S波段,而E-2C工作频率为UHF波段,单站无源定位基本无法满足此类型空中目标无源定位的应用需求。双站无源定位对探测信号无限制,具定位速度快、精度高等优势,非常适于上述应用场景。目前,对双站无源定位和跟踪技术已有较多研究[8-11]。文献[8-9]采用测向交叉定位方法,天线尺寸较大、定位精度有限;文献[10]研究了双基地MIMO雷达目标定位及幅相误差自校正算法;文献[11]使用迭代求解方法,定位精度较高但定位速度慢且计算量大。本文基于空中目标无源定位的应用需求,研究了一种联合DOA,TDOA的双站无源定位算法,对其中一个单站测向精度要求较低,可实现天线小、系统简单、定位速度快;研究了一种联合TDOA,FDOA的双站无源跟踪算法,可实现对目标的持续跟踪和更高精度的目标位置测量。
1 DOA和TDOA双站无源定位
单站无源定位的定位性能和灵活性较差,无法满足对空中目标无源定位的应用需求。本文研究了基于双站的联合信号DOA,TDOA的无源定位算法,主要利用空间几何关系,DOA表现为一条直线,TDOA表现为一条曲线,两线相交于两点,通过另一传感器测得的DOA(精度要求相对较低,天线小、系统简单,可作为机动传感器)即可选取其中一站作为目标的位置,定位模型如图1所示。其中:双站可分为放置的浮标(传感器1)和制导系统(传感器2),位置分别为s1,s2,目标位置为x(x,y,z),目标方位和俯仰角分别为α,β。

图1 DOA和TDOA联合双站无源定位分析模型Fig.1 Analysis model for passive localization using jointed DOA and TDOA information from double observers
根据几何关系有

(1)
式中:Δt为信号到达制导系统和到达浮标的时间差TDOA;c为光速。式(1)的第一式为TDOA方程,第二式为过点s1(定义为坐标原点)和信号到达方向确定的空间直线方程。由空间几何关系,TDOA方程得到的双曲面与DOA确定的直线有交点2个,其中一个即为目标位置。
定义n=[cosβcosαcosβsinαsinβ]T,则有
cΔt+‖s2-ng‖=‖s1-ng‖.
(2)
两边平方可得
2cΔt‖s2-ng‖=2(s2-s1)Tng+
‖s1‖2-‖s2‖2-c2(Δt)2.
(3)
定义h=‖s1‖2-‖s2‖2-c2(Δt)2,式(3)两端再平方得
a0g2+b0g+c0=0.
(4)
式中:

(5)
由式(4)、(5)可得

(6)
由式(1)第二式可得目标位置
x=ng.
(7)
根据某一站测量的DOA与双站测量的TDOA获得上述两个定位结果,再根据另一站测量的DOA选择其中一个结果为目标的位置。为获得更高的定位精度,上述方法中,可利用制导系统测量的DOA和双站测量的TDOA计算目标定位结果,根据浮标测量的DOA选取目标的估计位置,同样可利用浮标测量的DOA计算,根据制导系统测量的DOA选取。由此得到两个目标位置的估值,取平均即可得更高精度的目标位置坐标。
2 TDOA和FDOA双站无源跟踪
DOA测量技术已较成熟,但联合DOA,TDOA的定位精度受DOA的测量精度影响较大。被动接收到目标发射信号后,除可获得TDOA测量信息外还能同时得到信号到达频率差(FDOA)信息。联合TDOA,FDOA测量信息,可实现对目标更高精度的被动无源跟踪和被动制导系统精确制导。
目标跟踪中常用算法有卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)、无色卡尔曼滤波(UKF)和粒子滤波(PF)等[11-17]。文献[13]根据TDOA,FDOA测量信息,用EKF对目标进行无源跟踪。本文基于TDOA,FDOA测量信息,用UKF对目标进行被动式无源定位。UKF的核心是无色变换(UT),根据前一时刻的状态选择一组Sigma点,再通过非线性变换得到相应的伪随机变量,统计分析该变量在当前时刻的均值和方差[15]。联合TDOA,FDOA的双站无源跟踪算法主要利用TDOA,FDOA观测值和UT变换对目标位置进行迭代预测与更新,实现对目标的持续跟踪和更高精度的目标位置测量。
设双站仍分别为制导系统和放置的浮标,位置分别为s1,s2,速度分别为v1,v2,目标位置和速度分别为x(x,y,z),v(vx,vy,vz),则信号到达制导系统和到达浮标的TDOA,FDOA分别为
(8)

a)选取Sigma点:按文献[16]方法选取一组χ(i)及其权值w(i)。此处:i=0,1,…,(2Nx+1)。其中:Nx为状态向量的维数。
b)状态预测。根据式(6)状态方程预测每个Sigma点的状态

(9)
式中:dt为观测量采样时间;( )(i)表示( )的i列。
c)预测状态的均值和方差矩阵。由文献[7]可得预测状态的均值和方差矩阵分别为

(10)

(11)
式中:Qk为状态预测误差的方差矩阵。
d)观测值预测。由式(8)预测观测值

(12)
e)预测观测值均值和方差矩阵。有

(13)

(14)
式中:Rk为观测噪声的方差矩阵。
f)预测状态和观测值的协方差矩阵。有

(15)
g)用KF方程一步更新。有

(16)

(17)

(18)
式中:Kk为卡尔曼滤波增益;zk为时刻k真实的观测值。
时刻k最终估计的目标位置为

(19)
3 仿真与分析
3.1 DOA和TDOA无源定位
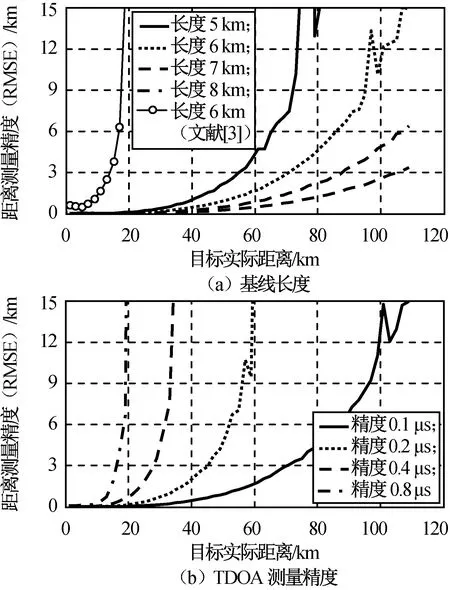
图2 DOA,TDOA联合双站无源定位结果Fig.2 Results of passive localization using jointed DOA and TDOA information from double observers
设信号DOA方位和俯仰角测量精度5°,TDOA测量精度0.1 μs,在基线长度(制导系统至浮标的距离)分别为5,6,7,8 km条件下目标距离测量精度仿真结果(10 000次蒙特卡罗)如图2(a)所示;基线长度6 km,在TDOA测量精度分别为0.1,0.2,0.4,0.8 μs条件下的目标距离测量精度仿真结果如图2(b)所示。由图可知:基线长度对DOA,TDOA双站无源定位结果影响较大,基线长度越大定位精度越高,基线长度为6 km时可实现作用距离100 km时的距离测量误差小于10%;TDOA的测量精度对定位结果影响较明显,当测量精度0.1 μs时,基本能满足作用距离100 km时距离测量误差小于10%;本文联合DOA,TDOA的双站无源定位方法性能明显优于文献[3]传统测向交叉双站无源定位法。
基于DOA,TDOA的双站定位可适应目标发射的任意信号。对TDOA的测量,需制导系统与浮标的时间同步,常用的方法有两种:一是利用GPS时间同步和主站发出同步信号。GPS的授时精度为30 ns,以GPS参考码元前沿为参考,可实现制导系统与浮标间同步精度为数十纳秒至0.3 μs。二是利用制导系统发出同步信号,可实现更高的同步精度,对系统时钟100 MHz(0.01 μs)能实现的同步精度优于0.1 μs。
3.2 TDOA和FDOA无源跟踪
设目标距离为50 km,速度为零,制导系统以1Ma飞行,信号到达制导系统和浮标的FDOA测量误差为TDOA测量误差的0.5倍,dt=0.01 s,基线长度为3,6 km的TDOA和FDOA跟踪结果如图3(a)所示,TDOA测量精度为0.1,0.4 μs的TDOA和FDOA跟踪结果如图3(b)所示。图中:CRLB为跟踪结果的克拉美-罗界,其确定跟踪过程中状态估计的二阶最好的估计性能[13]。由图可知:基线长度对跟踪有一定的影响,但远小于利用DOA和TDOA定位。基线长度6 km时,跟踪10 s后,UKF算法收敛性较好,跟踪精度达到205.2 m,且逐渐逼近克拉美-罗界的性能;EKF收敛性和跟踪性能均较差。TDOA和FDOA测量精度对UKF算法跟踪性能的影响较大,但测量精度0.1 μs较易实现。
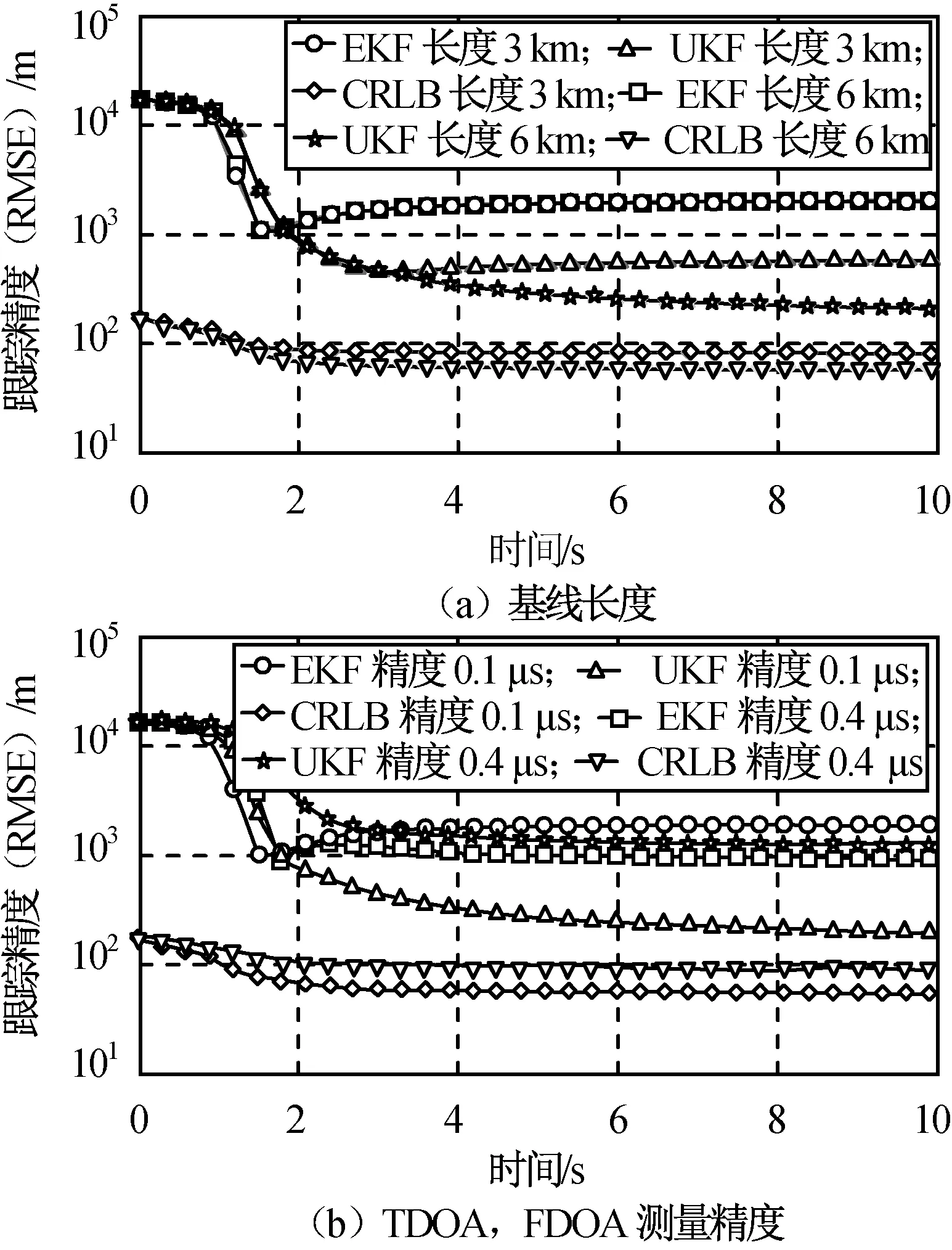
图3 TDOA,FDOA双站无源跟踪结果Fig.3 Results of passive tracking using jointed TDOA and FDOA information from double observers
4 结束语
根据对空中目标被动定位和跟踪的应用需求,本文研究了一种基于DOA,TDOA的双站无源定位算法和一种基于TDOA,FDOA的双站无源跟踪算法。与单站定位和传统双站定位方法相比,双站无源定位算法具定位精度高、定位速度快、对自身运动轨迹与目标发射信号形式等条件要求低、系统简单易实现的优势;双站无源跟踪算法充分利用双站可测量的TDOA,FDOA信息,实现对目标的稳定持续跟踪和目标位置的更高精度测量。由仿真结果可知:基于DOA,TDOA的双站无源定位性能明显优于仅利用DOA交叉定位等普通的双站无源定位算法;基于TDOA,FDOA利用UKF的双站无源跟踪算法收敛性好,被动跟踪精度能达百米级。两种算法均适应任意形式的接收信号,可用于具有隐蔽性好、作用距离远的制导系统,且对其中一观测站要求较低,易于实现一机动一静止的双站无源定位和跟踪。在工程实现时,TDOA测量对双站的时间同步要求较高,因此后续需对双站的无线时间同步和TDOA的高精度测量进行研究。
[1] 华铁洲. 单站无源定位关键技术研究和误差分析[D]. 郑州: 中国解放军信息工程大学, 2010.
[2] 刘建, 安智国. 固定单站对运动目标的无源定位[J]. 中国电子科学研究院学报, 2008, 3(1): 60-64.
[3] 李望西, 黄长强, 王勇, 等. 一种利用相位差变化率的机载单站无源定位方法[J]. 电讯技术, 2012, 52(1): 13-17.
[4] 陆效梅. 单站无源定位技术综述[J]. 舰船电子对抗, 2003, 26(3): 20-23.
[5] 华阳. 电子侦察无人机单站无源定位研究[J]. 舰船电子对抗, 2009, 32(2): 14-17.
[6] GORDON N, SALMOND D. Novel approach to non-linear and non-Gaussian Bayesian state estimation[J]. Proc of IEE, 1993, 140(2): 107-113.
[7] 牛新亮, 赵国庆, 刘原华, 等. 基于多普勒变化率的机载无源定位研究[J]. 系统仿真学报, 2009, 21(11): 3370-3373.
[8] 郭路, 齐润东, 郑学合. 一种新的基于特征值分解的双站无源定位算法[J]. 现代防御技术, 2004, 32(1): 56-61.
[9] 王本才, 何友, 王国宏, 等. 双站无源定位最佳配置分析[J]. 火力与指挥控制, 2012, 37(2): 120-123.
[10] 李洪兵, 姜军, 田海林, 等. 双基地MIMO雷达目标定位及幅相误差自校正算法[J]. 上海航天, 2014, 31(4): 11-16.
[11] 李程. 快速双站无源定位技术研究[J]. 南京: 南京理工大学, 2005.
[12] 赵树杰, 赵建勋. 信号检测与估计理论[M]. 北京: 清华大学出版社, 2005.
[13] TAKABAYASHI Y, MATSUZAKI T, KAMEDA H. Target tracking using TDOA/FDOA measurements in the distributed sensor network[C]// SICE Annual Conference, 2008.
[14] JULIER S J, UHLMANNJ K. Unsented filtering and nonlinear estimation[J]. Proceeding of the IEEE, 2004, 92(3): 401-422.
[15] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filter for online onlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174-188.
[16] SIMON J, UHLMANN J, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transaction on Automatic Control, 2000, 45(3): 477-482.
[17] RISTIC B, ARULAMPALAM S, GORDON N. Beyond the Kalman filter: particle filter for tracking applications[M]. Norwood: Artech House, 2004.
Research on Passive Localization and Tracking Based on Double Observers
JIANG Li-zhong, ZOU Bo, TAN Shan-shan
(Shanghai Radio Equipment Research Institute, Shanghai 200090, China)
To improve the performance of passive localization and tracking and solve the disadvantages of little information, slow localization and low tacking accuracy, the passive location algorithm using the information of direction of arrival (DOA) and time difference of arrival (TDOA) to get the location of target and the passive tracking algorithm using the TDOA and frequency difference of arrival (FDOA) information to track the target were studied in this paper. Among them, the spatial geometric relationship was used in the passive location algorithm to resolve the target location and the unsented Kalman filter was used in the passive tracking algorithm to keep tracking the target and get more accurate location information. The simulation results showed that the proposed localization algorithm had the characteristic of high accuracy in the condition that the radar base line was short and the target range within 100 km, the range estimation error would be smaller than 10%, and the proposed tracking algorithm had the advantage of fast convergence rate and its tracking accuracy would be hundreds meters. Both algorithms are adaptive to receive any kinds of signals and can be used in the guidance system with good hiding and long operation distance.
Double observers; Passive localization; Passive tracking; Direction of arrival; Time difference of arrival; Frequency difference of arrival; Spatial geometric relationship; UKF
1006-1630(2016)04-0045-05
2015-10-13;
2015-11-26
江利中(1986—),男,工程师,主要研究方向为微波探测和测量雷达技术。
TN95
A
10.19328/j.cnki.1006-1630.2016.04.008