GPS-ZigBee组合定位在现代有轨电车定位中的应用
2016-12-19武文平王瑞峰
武文平 王瑞峰
(兰州交通大学自动化与电气工程学院,730070,兰州∥第一作者,硕士研究生)
GPS-ZigBee组合定位在现代有轨电车定位中的应用
武文平 王瑞峰
(兰州交通大学自动化与电气工程学院,730070,兰州∥第一作者,硕士研究生)
目前,现代有轨电车定位主要采用GPS(全球定位系统)定位方式,在某些特殊地区其定位精度会受到影响,提出GPS-ZigBee(紫蜂协议)组合定位的方式定位来解决这一问题。并且提出使用联邦卡尔曼滤波器对GPS定位数据和ZigBee定位数据进行滤波融洽,提高GPS-ZigBee定位组合的定位精度。结果表明,经过融合滤波,GPS-ZigBee组合定位在提高现代有轨电车定位精度方面,比较原有的定位系统更具优越性,使现代有轨电车定位系统的定位精度得到有效改善。
现代有轨电车; GPS-ZigBee组合定位; 定位精度; 联邦卡尔曼滤波
Author′s address College of Automatic & Electrical Engineering,Lanzhou Jiaotong University,730070,Lanzhou,China
目前,现代有轨电车主要采用GPS(全球定位系统)结合速度传感器的方式进行定位。在城市高楼密集区、高架桥下、隧道里等地方,GPS信号受到干扰较大,现代有轨电车在这些地方甚至有可能接收不到GPS信号,导致定位误差比较大,因此需要结合其他定位方式来实现现代有轨电车的实时连续定位。ZigBee(紫蜂协议)技术具有高安全性、高可靠性、组网方便等诸多优点,所以选取GPS-ZigBee组合定位方式。文献[1]提出了一种基于ZigBee传感器网络和DGPS定位方式进行协同及数据交换的无缝定位方法,但是只是利用了ZigBee的通信功能对GPS信号进行传输与交互,并没有综合利用两者在定位方面的优势进行归集或数据的综合处理[1]。文献[2]提出了GPS与蜂窝网相结合的无缝定位,但是由于蜂窝网的定位精度较低,只能定位出物体的大概位置,会影响整个无缝定位系统的精度[2]。文献[3]提出了TV-GPS融合技术实现无缝定位,但是提出的实施方案没有用滤波算法或相关算法进行数据的平滑处理,定位效果不能得到保障[3]。文献[4]提出了GPS和无线传感器网络融合定位算法,但是仅仅是通过权重等计算方式进行简单的组合,其实时性较差[4]。
本文将GPS和ZigBee定位技术相结合,将两者应用于现代有轨电车的定位系统中,形成组合定位。使用联邦卡尔曼滤波器中对GPS定位数据和ZigBee定位数据进行融合,实现两者的组合定位。在现代有轨电车运动过程中,当GPS信号受到遮挡或其他因素影响,现代有轨电车定位不准确时,可以对GPS和ZigBee各自采样出来的点通过联邦卡尔曼滤波进行滤波融合,使定位系统的效果能达到最优,有效提高GPS-ZigBee组合定位的定位精度[1]。
1 GPS和ZigBee技术
1.1 GPS定位技术
GPS是当今世界上应用最广泛的全球精密导航、指挥和调度系统[4]。GPS的系统包括三个部分:空间运行系统(由24颗卫星组成)、地面监控系统(包括1个主控站、5个监控站和3个注入站)和用户系统(GPS接收机)。
GPS的定位过程为:卫星连续向地球发射经过编码调制的连续波无线电信号(信号中含有卫星准确的发射信号时间和其空间位置),GPS接收机接收此无线电信号,测量信号的到达时间,计算卫星和用户之间的距离,然后用滤波法解算得到用户的位置[5]。
1.2 ZigBee定位技术
ZigBee技术是一种新型的短距离、低速率无线网络技术,它是一种介于无线标记技术和蓝牙之间的技术方案,在无线传感网络中有着非常广阔的应用前景[6]。ZigBee协议是以IEEE 802.15.4无线通信协议标准为基础,在IEEE 802.15.4定义的物理层(PHA)和介质访问控制层(MAC)之上,将网络层和应用层进行标准化而形成的ZigBee标准。
2 GPS-ZigBee组合定位
现代有轨电车在进入GPS信号接收较差的区域时,使用GPS-ZigBee组合定位。盲节点(待定位节点)置于现代有轨电车的车载设备中,通过感应它的移动来实现现代有轨电车的定位(ZigBee定位方式),进而实现现代有轨电车的组合定位。现代有轨电车的定位过程如图1所示。
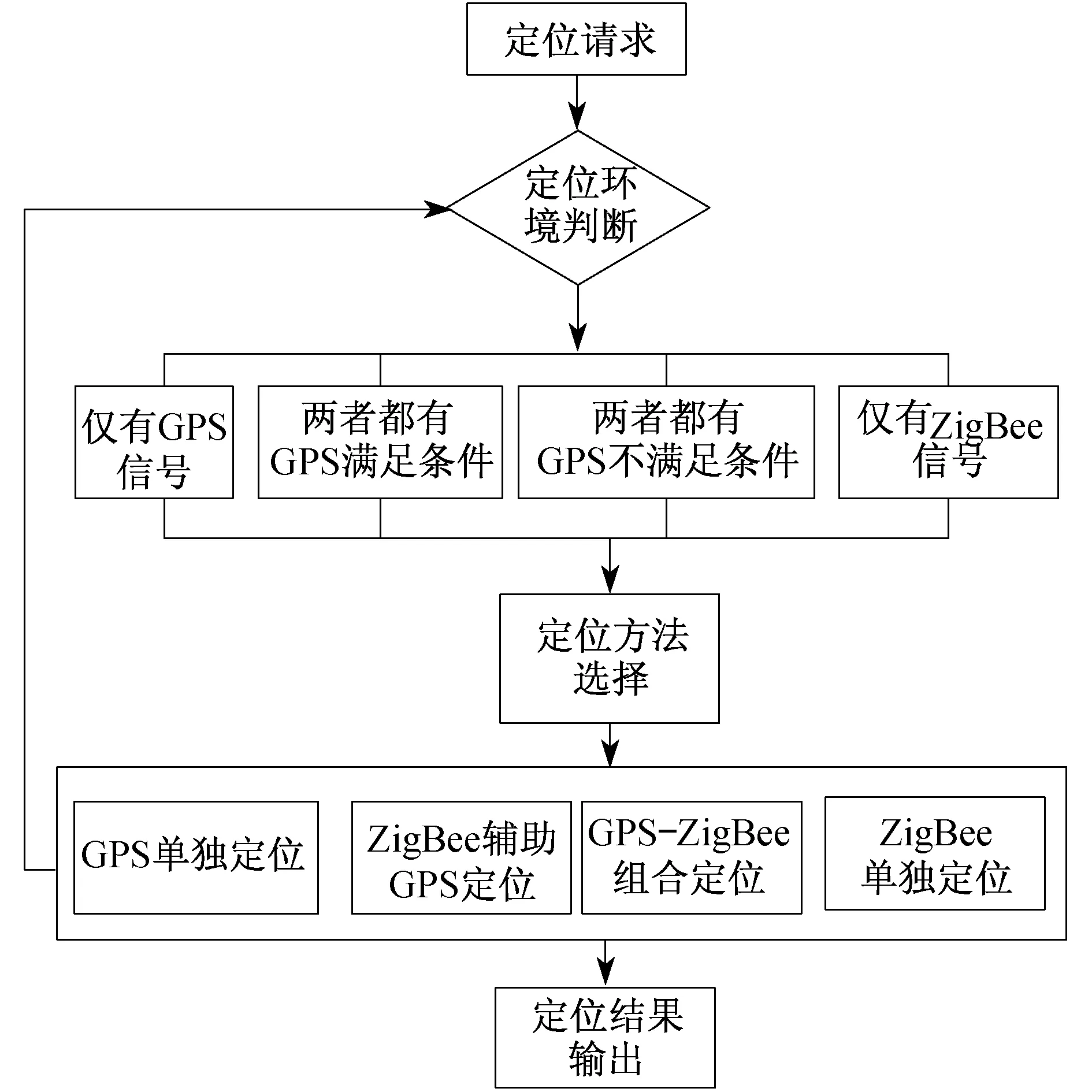
图1 现代有轨电车定位过程
2.1 组合定位原理
一般情况下,GPS定位方式和ZigBee定位方式的定位精度不同,两者的数据格式也不同,而且加入ZigBee测量值后,对系统的定位精度也有影响。所以,要对两种定位方式进行融合滤波计算。GPS-ZigBee组合定位的原理图如图2所示。
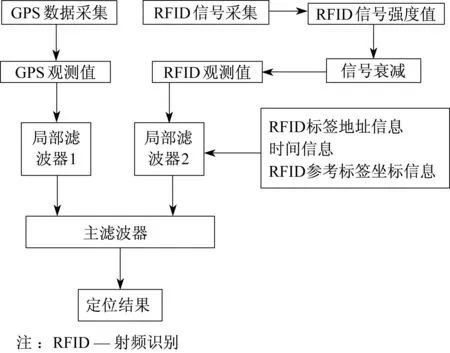
图2 GPS-ZigBee组合定位原理图
但是在现代有轨电车GPS-ZigBee组合定位系统中,由于其四周动态事物的影响,各天线增益在不同方向上会存在差异从而影响到GPS-ZigBee组合定位的精度[7]。本文以增加单个ZigBee测量值对定位系统的定位精度影响为例,作出如下理论分析。
令Hm-1,i,为从m颗卫星中去掉第i颗卫星(i=1,2,…,m)得到的m-1颗卫星测量矩阵,Hm为增加一个ZigBee测量值后的观测矩阵,增加的第i个ZigBee测量矢量为:hi=[exieyiezi0],exi、eyi、ezi分别为x、y、z方向上的第i个ZigBee测量值,两者有如下关系[7]:
(1)
由Sherman-Morrison公式可得:
(2)


(3)

(4)
增加一个ZigBee测量值后,对减小FGDOP(几何精度因子)值的贡献为r,则有:
(5)
一般情况下,GPS定位设备和ZigBee定位设备的定位精度不同,在加入单个ZigBee量测值之后,系统定位误差σx2为:
(6)
2.2 场景分析
假设现代有轨电车在笔直的道路上行驶,电车行驶区域内的局部环境都各不相同。以某市现代有轨电车1号线为例,现代有轨电车的定位场景图如图3所示。
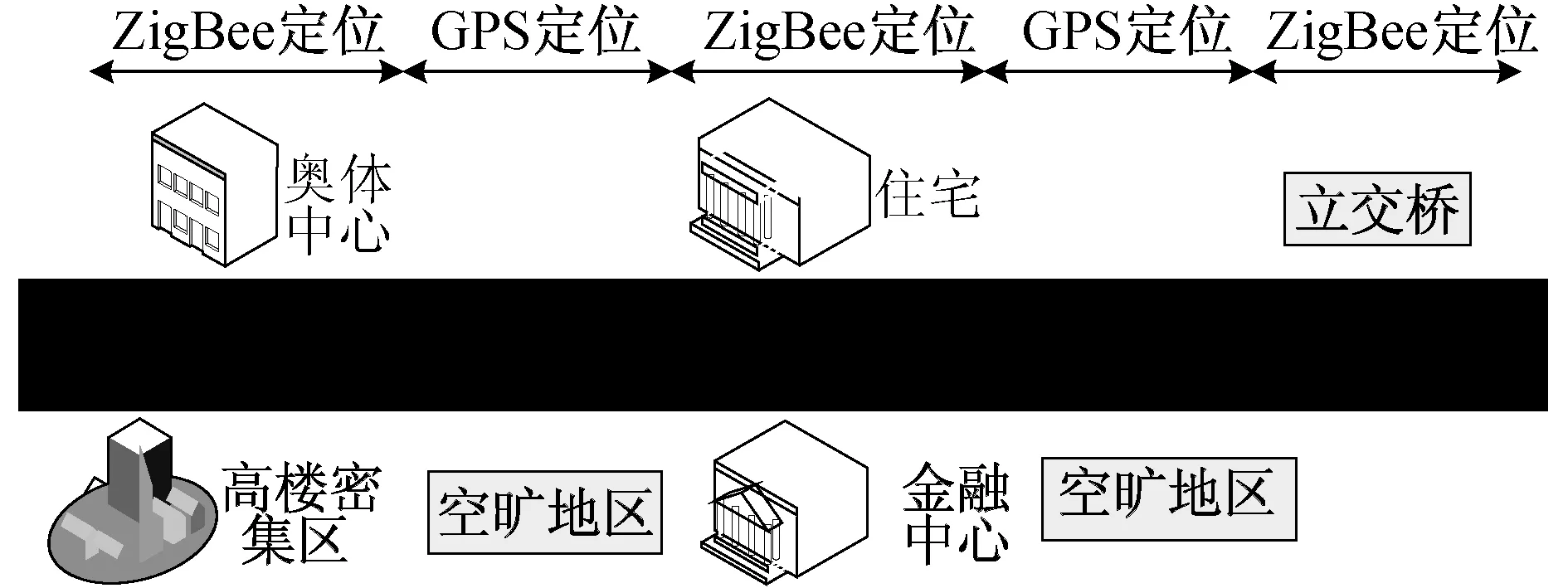
图3 现代有轨电车定位场景图
在城市高楼林立的地方、立交桥下以及隧道里等地方GPS信号接收较差,现代有轨电车甚至有可能接收不到GPS信号,因此使用ZigBee定位设备;在郊区、广场周边等比较空旷的地区,GPS信号接收良好,就使用GPS定位设备;在两区域交界的地方(即过渡地带),使用GPS-ZigBee组合定位设备。
3 结果分析
GPS具有全天候、高效率、功能可靠性高等特点,但是GPS的定位精度受环境因素影响较大[9]。GPS系统的定位误差影响因素较多,而且误差较大,而采用GPS-ZigBee组合定位的方法就可以很大程度上降低定位误差。图4是三种定位方法在不同环境下成功率的比较。从图4中可以看出,GPS定位在隧道里的成功率是最低的,而组合定位的方法可以适用于任何地区。
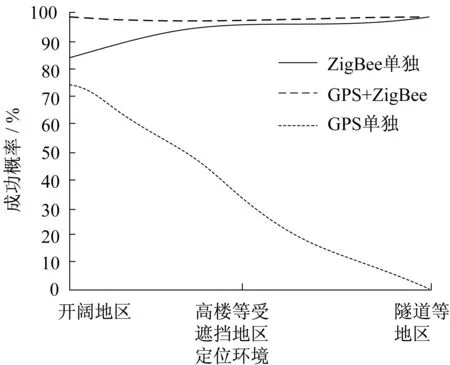
图4 三种定位方法在不同环境下定位结果比较图
选取该市现代有轨电车车载GPS一天的实时定位数据,利用联邦卡尔曼滤波算法进行处理。图5是数据处理后的GPS-ZigBee组合定位与GPS单独定位的定位误差比较图,从5图中可以看出,GPS单独定位的定位误差在3~7 m之间,而GPS-ZigBee组合定位的定位误差可减小至2 m以下。该图反映了GPS-ZigBee组合定位的定位精度大大提高,可以满足现代有轨电车的定位精度需求,实现其实时连续定位,为乘客不间断地提供现代电车的具体位置,方便乘客出行。
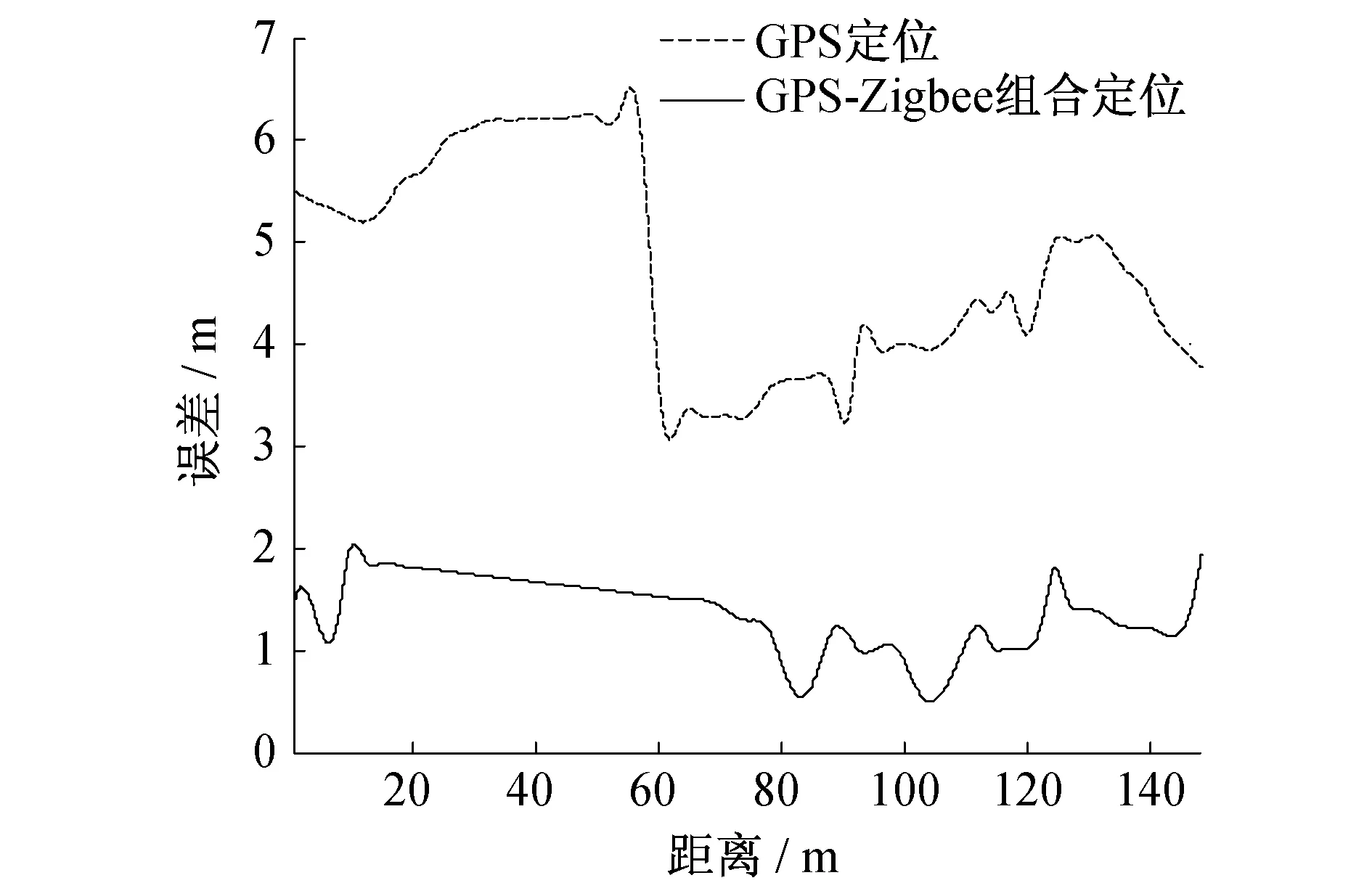
图5 不同定位方式的定位结果比较图
[10]可以将定位精度分为四个等级,如表1所示[10]。

表1 定位精度等级评估表
根据表1所列出的定位精度等级评估标准,对GPS定位和GPS-ZigBee组合定位作出比较。表2列出了比较的结果。
从表2中可看出,GPS-ZigBee组合定位的定位精度远远高于GPS单独定位精度。借助联邦卡尔曼滤波算法,GPS-ZigBee组合定位方案很大程度上提高了现代有轨电车定位系统整体的定位精度,与单独使用GPS定位设备相比,现代有轨电车的定位精度提高了近70%。
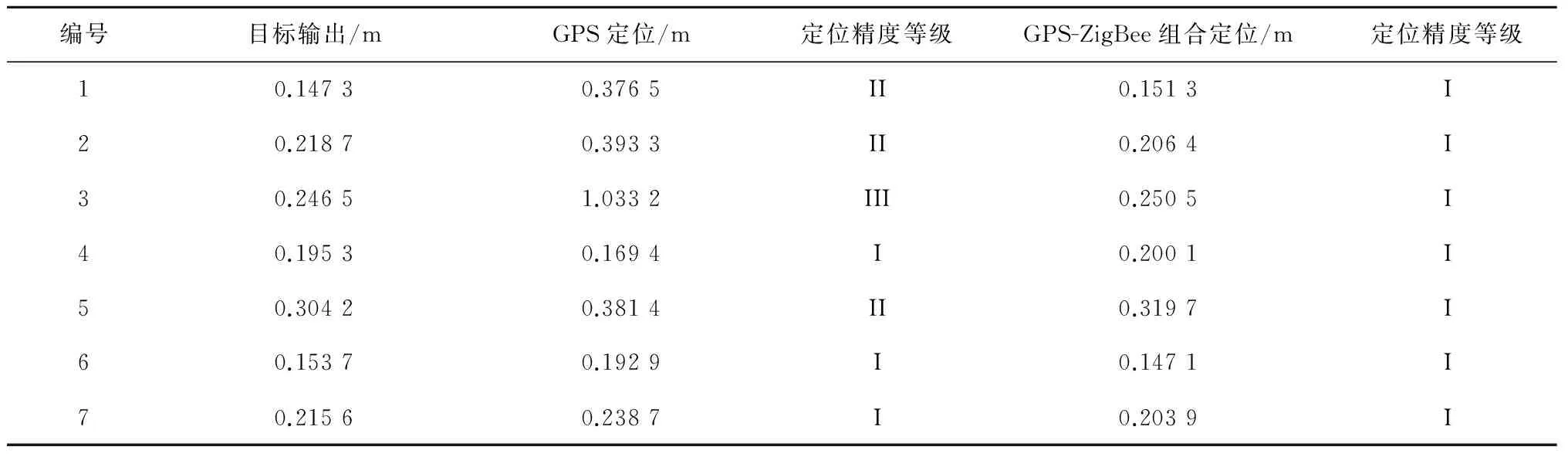
表2 GPS定位与GPS-ZigBee组合定位精度比较表
4 结语
本文提出了一种基于联邦卡尔曼滤波方法的GPS-ZigBee组合定位的方法,充分结合了GPS定位精度相对较高、实时连续定位和ZigBee定位设备网络容量较大、定位精度也很高、频段较灵活等特点,有效地解决了GPS在某些恶劣环境下(隧道、城市高楼密集区等)定位精度受到限制的问题。该定位方法具有定位精度较高、可用性较强等优点,并且具有很广阔的应用前景,实现了现代有轨电车的实时精确定位,能够提供更准确的定位信息,可以有效地保障现代有轨电车的运行安全,能在一定程度上改善城市轨道交通的运营水平,缓解交通状况。
参考文献
[1] 黄一杰,陈佳品,李振波.基于Zigbee的GPS相对定位技术[J].微机计算机信息,2008,24(31):224.
[2] 王视环.蜂窝网与GPS相结合的手机混合技术——GPSOne[J].信息与电子工程,2004,2(3):238.
[3] 田安红,周非,付乘彪.TV-GPS技术融合实现无缝定位分析[J].宽带网络,2009,33(8):54.
[4] 武昊然.GPS和无线传感网络融合定位算法研究[J].计算机仿真,2009,26(11):145.
[5] 王权.全球定位系统(GPS)定位原理及应用[J].中国计算机用户,1996(7):5.
[6] 青岛东合信息技术公司.ZigBee开发技术及实践[M].西安:西安电子工业大学出版社,2014.
[7] 李程,钱松容.射频识别动态定位方法[J].通信学报,2013,34(4):144.
[8] 米根锁,罗淼,牛彦霞.混沌微粒群优化BP神经网络算法在城市有轨电车定位中的应用[J].铁道学报,2015,37(6):67.
[9] 张威奕,陈秀万,李颖,等.基于GPS和ZigBee融合的无缝定位方法研究[J].宁夏大学学报(自然科学版),2013,34(1):40.
[10] WELLENHOF B H,LICHTENEGGWR H,COLLINS I.Global positioning system:theory and practice [M].4st ed.Springer-Verlag,Michigan,1997.Journal of South China University of Technology.
欢迎订阅《城市轨道交通研究》
服务热线 021—51030704
Application of GPS/ZigBee Integrated Positioning System in Modern TramWU Wenping, WANG Ruifeng
At present, modern tram often uses GPS positioning system, but the positoning accuracy is affected in some special areas. To solve this problem, a plan to adopt GPS/ZigBee integrated positioning is proposed, because the positioning accuracy could be increased by using Federal Kalman filter to integrate GPS and ZigBee positioning data. The result reveals that GPS/ZigBee integrated positioning has more advantages than the original positioning system in increasing the accuracy of modern tram's positioning. Consequently, it can enhance the accuracy of modern tram positioning system and improve the modern tram operation.
modern tram; GPS-ZigBee integrated positioning; positioning accuracy; Federated Kalman filter
*甘肃省自然科学基金(1310RJZA046)
U 482.1; TN926+.23; P 228.4
10.16037/j.1007-869x.2016.05.031
2015-12-08)