非共振型压电电机驱动的大行程精密定位旋转平台的建模和实验
2016-12-19黄卫清孙梦馨
黄卫清,陶 杰*,孙梦馨,王 寅,2,卢 倩
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,江苏 南京 210016;2.华侨大学 精密测量技术及仪器研究中心,福建 厦门 361021)
非共振型压电电机驱动的大行程精密定位旋转平台的建模和实验
黄卫清1,陶 杰1*,孙梦馨1,王 寅1,2,卢 倩1
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,江苏 南京 210016;2.华侨大学 精密测量技术及仪器研究中心,福建 厦门 361021)
针对目前光波导封装使用的精密定位平台行程小,结构与控制系统复杂的问题,提出了非共振型压电电机驱动的大行程精密旋转定位平台。该平台通过压电电机的连续作动和步进作动两种工作模式来满足大行程和高精度要求。首先对该精密旋转定位平台进行动力学建模,确定了系统运动方程。然后,分析其作动机理,研究影响旋转平台转速的不同因素。最后,实验研究该精密旋转定位平台的速度、步距、分辨率与负载特性,确定平台连续作动与步进作动的驱动方式。实验结果表明,在直流偏置为60 V,峰峰电压为120 V,频率为180 Hz的正弦波电压激励下,该精密旋转定位平台最大转速可达47 963.2 μrad/s, 分辨率和最大负载分别为3 μrad和60 g。与现有的大行程精密定位旋转平台相比,设计的平台具有行程大,精度高,结构简单,稳定可控,且装配调试方便,易于批量化生产等优势。
大行程旋转平台;非共振压电电机;精密定位;光波导封装
1 引 言
光波导封装作为光通信工程中的关键环节,亟需高精度和高效率的封装设备。压电作动器驱动的精密定位平台具有精度高、响应快、刚度大、能耗低等优点[1-2],能够满足光波导对接的精准度,有利于实现封装过程的自动化。但压电作动器作动范围在微米级,现有精密定位平台大多不能同时满足高精度与大行程的要求[3-4]。
目前,国内外学者对精密旋转定位平台作了一定研究,一方面受到驱动器作动范围和柔性铰链的输出位移的限制[5-8],大部分精密旋转定位平台不能满足大行程要求;另一方面,现有的大行程精密旋转定位平台存在结构和控制系统复杂、加工装配困难等问题[9-15]。
目前大行程精密旋转定位平台主要分为宏微两级驱动式、钳位式和粘滑式等。Zheng等人[11]设计了一种具有双平台的旋转定位平台,音圈电机作为宏观运动驱动器,压电陶瓷作为微动驱动器,但该平台控制系统较为复杂,尤其是宏观与微观运动的配合需要进一步研究。Haas[12]等人设计了一种用于太空中的钳位式压电驱动精密旋转定位平台,利用布置在圆周外侧2个驱动机构的配合实现旋转,每个驱动机构中包含2个压电叠堆,分别用于钳位和驱动。Huang[13]等人设计了一种单压电驱动器驱动的旋转定位平台,该平台基于连带运动原则,利用单个压电驱动器实现平台的钳位和驱动,但该设计中具有较长的悬臂梁结构,容易因振动影响驱动效果,且单个压电驱动器完成钳位功能不理想。Wang[14]等人提出一种具有史考特-罗素机构的精密旋转定位平台,该平台基于粘滑原理,依赖于摩擦力与惯性作动,粘滞-滑移过程较难控制,对实现高分辨率产生不利影响。而且该平台转动中心不在圆心,在驱动点将产生转动和平移,导致驱动力不能完全用于驱动转动。温建明[15]等人设计了对称压电叠堆为动力转换原件的旋转驱动器,利用惯性冲击力实现旋转。因为制造装配不能保证对称性,导致旋转过程中受力不均匀。
本文提出了非共振型压电电机驱动的大行程精密旋转定位平台,通过该压电电机的连续作动和步进作动两种工作模式,实现高精度和大行程的功能,研究了该平台动力学模型,实验测试该平台速度、分辨率、负载等特性,证实该精密旋转定位平台的可行性,为旋转平台的研究提供了新思路。
2 非共振型压电电机原理与结构[16]
本研究团队于2014年提出一种非共振型双足步进作动压电电机,该电机采用4路正弦波信号驱动4组压电叠堆,使驱动足产生微椭圆运动推动动子运动,具有响应快、精度高、行程大等特点。
图1分别表示非共振型双足步进作动压电电机的作动周期内,t1=0,t2=T/4,t3=T/2,t4=3T/4的典型状态。图2所示为一个周期内在各压电叠堆(对应图1中1~4)上施加的电压信号,为防止压电叠堆出现退极化,驱动电压应完全正向偏置。
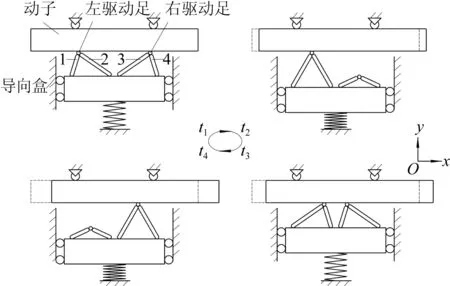
图1 电机工作原理图
(1)t1时刻,左驱动足开始接触动子,右驱动足脱离动子,动子在左驱动足摩擦力作用下,沿x正方向运动。
(2)t2时刻,动子随左驱动足在x方向速度达到最大,右驱动足离动子最远。
(3)t3时刻,右驱动足开始接触动子,左驱动足脱离动子,动子在右驱动足摩擦力作用下,沿x正方向运动。
(4)t4时刻,动子随右驱动足在x方向速度达到最大,左驱动足离动子最远。
一个周期内,两驱动足交替驱动动子,使动子向X轴正向运动。驱动足椭圆运动轨迹足够小,可以驱动旋转运动。

图2 周期内在压电叠堆上施加的电压信号
依照电机原理,设计电机结构如图3所示。电机主要包括导向盒与2个作动单元。为实现驱动旋转平台(即圆形动子),电机两作动单元垂直布置,通过装配螺钉安装在导向盒上。作动单元垂直布置方式,在原理、功能上与左右布置方式一致。每个作动单元包括2个垂直布置的压电叠堆,通过螺杆拉拔驱动足的方式实现压电叠堆的预紧。

图3 电机结构示意图
3 大行程精密旋转定位台设计与分析
3.1 大行程精密旋转定位台结构设计
图4、图5所示为非共振型压电电机驱动的大行程精密旋转定位平台,主要由非共振型压电电机、旋转平台、角接触球轴承、轴和基座组成。角接触球轴承选用NSK公司7004AC P5,轴承内圈与轴过盈配合,外圈与旋转平台内孔过盈配合。旋转平台设计4个沿Φ40 mm圆周均布的螺纹孔,主要用于安装平台载荷和拆卸轴承。非共振型压电电机的驱动足与旋转平台圆柱面接触,直接驱动平台运动。非共振型压电电机的驱动足与旋转平台的预压力通过电机夹持装置调节。

图4 大行程精密旋转定位平台实物图

图5 大行程精密旋转定位平台结构图
3.2 动力学建模分析
对应图1中4组压电叠堆的激励电压信号分别为:
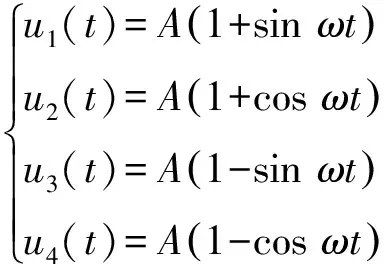
(1)
建立该压电电机纵向振动模型如图6所示。

图6 非共振型驱动压电电机纵向振动模型
Fig.6 Longitudinal vibration model of non-resonant piezoelectric motor
其中,m1、m2分别为上、下驱动足质量,记m1=m2=m,m0为作动单元其余部分与导向盒总质量。
k1、k2为上、下驱动单元压电叠堆纵向刚度,记k1=k2=k,则k=ks+kT,其中ks、kT分别为压电叠堆与预紧弹性机构刚度。k0为夹持装置中预压机构刚度。
F1(t)、F2(t)为压电叠堆的纵向输出力,F为预压力,FN1(t)、FN2(t)为上、下驱动足与旋转平台的接触正压力。
y1(t)、y2(t)为上、下驱动足的纵向位移,y0(t) 为压电电机其余部分纵向位移。
由压电学理论可知,压电叠堆输出力为[17]:

(3)
其中:kT为压电叠堆等效刚度,ks为外部载荷刚度,在模型中指压电电机其他部分总刚度。n为压电叠堆的层数,d33为压电叠堆的压电常数,则4组压电叠堆输出力为:

(4)
由几何关系可知:

纵向振动方程为:

(2)
压电电机处于工作状态时,预压力F几乎不发生变化,则:
F=FN1(t)+FN2(t)=kcy1(t)+kcy2(t),
(6)
其中:kc为驱动足与平台之间纵向接触刚度。由式(2)~(6)可得纵向位移方程为:

(7)
电机结构的横向特性与纵向特性相似,可得横向位移方程为:

(8)
消去时间参数t,得驱动足运动位移方程为:

(9)
其中:

(10)
可得,两驱动足的运动轨迹为大小相同的椭圆,两驱动足交替驱动旋转平台转动。
式(8)两边对时间t求导,可得驱动端线速度函数:

(11)
根据文献[16]提出的准静态假设,假设驱动足的驱动频率足够低,驱动足与旋转平台之间无相对滑动,驱动足与旋转平台之间为静摩擦力。则旋转平台角速度为:

(12)
其中:R为旋转平台半径。
由式(12)可知,在压电叠堆特性与旋转平台结构确定的情况下,旋转平台角速度只与驱动电压幅值A,频率f及旋转平台半径R有关。
一个周期内,旋转平台转速呈周期性变化,但旋转平台宏观运动由压电电机驱动足连续周期性驱动,因此宏观运动速度表现为周期内精密定位旋转平台平均速度,为匀速运动。精密定位旋转平台平均速度为:

(13)
则其精密定位旋转平台周期内转角为:

(14)
驱动电压峰峰值为100 V,偏置为50 V,精密定位旋转平台理论转速如图7所示。

图7 电压峰峰值100 V,偏置50 V,精密旋转平台理论转速
Fig.7 Theoretical rotation speed under a driving voltage of 100 V with 50 V offset
4 实 验
4.1 实验系统
图8所示为旋转平台输出特性实验系统,主要包括气浮隔振平台(ZDT10-08)、信号发生器(MHS-2300A)、功率放大器(XE500-A4)、示波器(Tektronix DPO2014)、激光位移测量仪(KEYENCE LK-HD500)。在旋转平台转角极小的情况下,可以使用激光位移测量仪测得直线位移代替弧长,经计算后得到转角及转速。

图8 精密旋转平台输出特性实验系统
Fig.8 Experiment system of output characteristics of precision rotary positioner

图9 精密旋转平台负载特性实验系统
Fig.9 Experiment system of load characteristics of precision rotary positioned
图9所示为旋转平台负载特性实验系统,除输出特性实验系统中所需仪器,还包括定滑轮、砝码及吊绳等。
4.2 连续作动模式实验
连续作动模式是指施加连续的驱动电压信号,使精密旋转平台快速到达预定工位的作动模式。连续作动模式实验主要在宏观与微观上,研究精密旋转平台转动速度与驱动电压频率、峰峰值的变化关系,并确定连续作动模式合适的电压峰峰值和频率,以及对应的旋转平台转速。
4.2.1 转速与电压频率、峰峰值测试
图10所示为精密定位旋转平台转速与电压频率、峰峰值的变化关系。总体趋势上,随着电压峰峰值的增加,精密旋转平台转速呈增加趋势。在电压峰峰值分别为80 V、90 V和100 V时,随着电压频率增加,精密旋转平台转速随之增大,且精密旋转平台转速与电压频率呈较好的线性关系。在峰峰值为100 V,偏置为50 V,频率为200 Hz 的正弦波电压激励下,精密旋转定位平台转速可达35 498.2 μrad/s。
比较图7中,驱动电压峰峰值为100 V,偏置为50 V 下理论计算转速,平均误差约为11%。误差原因是横向振动模型忽略了交变摩擦力,因交变摩擦力对平台运动影响较小且作用机理复杂,故动力学建模将其忽略。另外一个原因是理论转速计算基于准静态假设,事实上随着驱动电压的频率增加,驱动足与转动平台之间存在滑动。
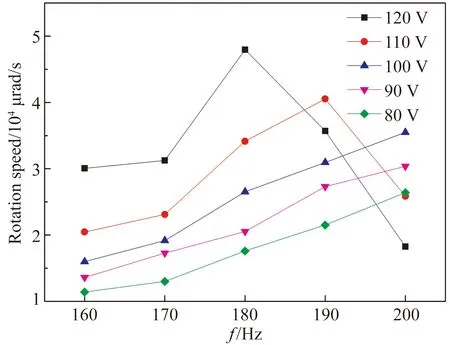
图10 精密旋转平台转速与频率、电压的变化关系
Fig.10 Rotation speed of precision rotary positioner under different frequency and voltage
在电压峰峰值分别为110 V和120 V时,随着电压频率增加,精密旋转平台转速先增大后减小。在直流偏置为60 V,峰峰值为120 V,频率为180 Hz 的正弦波电压激励下,精密旋转定位平台达到最大转速47 963.2 μrad/s。当电压峰峰值与频率过大时,压电叠堆输出特性会发生改变,因此压电电机驱动足无法产生预想的椭圆驱动轨迹,此时精密旋转平台转速出现较大下降。
通过分析精密旋转平台转速与频率、电压的变化关系可知,在电压峰峰值分别为90 V和100 V时,精密旋转平台转速较大且与电压频率呈较好线性关系。通过调节电压频率,可以稳定地调节精密旋转平台转速。在电压峰峰值为120 V时,虽可达到平台最高转速,但不能实现稳定调节转速。因此,考虑精密旋转平台连续作动模式优选电压峰峰值为90 V,偏置为45 V或电压峰峰值为100 V,偏置为50 V。
4.2.2 步进转角测试
微观上,连续作动模式下精密旋转平台的转角在每个驱动周期内作往复运动,但是由于前进转角大于回撤转角,因此在一个周期内精密旋转平台实现向前转动。
图11所示为驱动电压峰峰值为90 V,偏置为45 V时,在不同频率下步进转角特性。随着电压频率从160 Hz增加到200 Hz,步进转角从86.5 μrad 增加到151.25 μrad。

图11 电压峰峰值90 V,偏置45 V转角步进特性
Fig.11 Stepcharacteristics under a driving voltage of 90 V with 45 V offset
图12所示为驱动电压峰峰值为90 V,偏置为 45 V 时,在不同电压频率下转角步进特性。随着电压频率从160 Hz增加到200 Hz,步进转角从101.5 μrad增加到165.6 μrad。
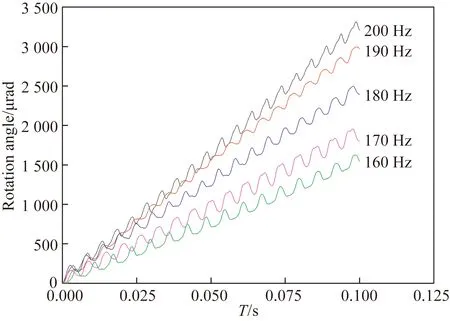
图12 电压峰峰值100 V,偏置50 V转角步进特性
Fig.12 Step characteristics under a driving voltage of 100 V with 50 V offset
可以看出,在100 V驱动电压下,相比于90 V 时精密旋转平台的回撤转角显著减小。如前述分析,理想情况下,双驱动足压电电机,在一个驱动足开始驱动旋转平台时,另一驱动足恰好离开旋转平台。但因为加工装配误差的存在以及压电叠堆的迟滞特性,在一个驱动足开始驱动旋转平台时,另一驱动足仍然接触旋转平台,且带动旋转平台回撤。驱动电压峰峰值增加,压电叠堆伸长量增加,因此压电电机驱动足振幅增大。压电电机一个驱动足驱动旋转平台时,因为驱动足振幅增大,将压电电机预压机构顶回一定距离,导致另一驱动足的回撤效应减小。精密旋转平台的连续作动模式,应选择驱动电压峰峰值为100 V,偏置为50 V,此时旋转平台作动平稳,速度特性稳定。
4.3 步进作动模式实验
精密旋转平台步进模式是指在旋转平台到达预定工位后,通过施加脉冲电压信号,驱动旋转平台实现更加精确的位置调整的作动模式。施加的脉冲电压波形如图13所示,在每个驱动波形后设置较长的间歇段,可测得旋转平台分辨率。步进作动模式相对于连续作动模式,由于弱化了惯性作用,驱动精度显著提高。

图13 脉冲信号波形
平台分辨率指实验中的最小稳定步距。图14 所示为脉冲电压峰峰值为50 V,偏置为25 V,频率为1 Hz时,平台转角输出曲线。5步累积转角约为15 μrad,即每步平均转角约为3 μrad。如图14所示,每周期运动开始时转角发生较大的跳变并快速回位,导致这一现象的主要原因是脉冲电压信号导致的冲击振动。
通过实验可知,随着驱动电压峰峰值的不断降低,步进作动模式中旋转平台步距随之减小,定位精度提高。当电压峰峰值低于50 V时,精密旋转平台无法稳定转动。可以确定,本精密旋转平台分辨率约为3 μrad。因此精密旋转平台的步进作动模式,选择驱动电压峰峰值为50 V,偏置为25 V,频率为1 Hz,能够实现较高的分辨率和定位精度。

图14 脉冲电压50 V, 频率1 Hz转角输出曲线
Fig.14 Output curve of rotation angle under a pulse voltage of 50 V with the frequency of 1 Hz
4.4 负载特性实验
负载特性是衡量精密旋转平台的重要指标之一,采用连续作动模式下峰峰值为100 V,偏置为50 V,频率为200 Hz的驱动电压研究负载特性。

图15 精密旋转平台负载特性
如图15所示,随着负载质量的增加,精密旋转平台转速呈线性减小趋势,其中负载质量为60 g 时,旋转平台转速为17 730.8 μrad/s。负载质量大于70 g时,旋转平台运动不稳定,负载质量大于90 g时,负载大于压电电机与旋转平台间的静摩擦力。精密旋转平台最大负载为60 g,基本满足光波导对接要求。
5 结 论
本文设计了非共振型压电电机驱动的大行程精密旋转定位平台,确定了连续作动和步进作动两种工作模式,实验证明该精密旋转定位平台能够达到大行程和高精度的要求。通过对该精密旋转定位平台进行动力学建模,确定系统运动方程,详细分析其作动机理。通过实验,研究该精密旋转定位平台的速度、步距、分辨率与负载特性。实验结果表明,精密旋转定位平台最大转速可达47 963.2 μrad/s,旋转平台分辨率为3 μrad,最大负载为60 g。本精密旋转定位平台具有大行程,高精度,结构简单,稳定可控,响应快等特点,相对于现有大行程精密定位旋转平台具有方便装配调试、易于批量化生产等优势,有利于实现光波导封装的自动化,提高光波导产业的生产效率。目前电机驱动力较小,导致平台负载能力偏小等问题,需要进一步改进电机结构,方能应用在其他负载要求较大的领域。
[1] 赵淳生. 超声电机技术与应用[M]. 北京:科学出版社,2007. ZHAO CH SH.UltrasonicMotorsTechnologiesandApplications[M]. Beijing: Science Press, 2007. (in Chinese)
[2] KARL S, BURHANETTIN K. Piezoelectric motors, an overview [J].Actuators, 2016, 5(1):6.
[3] ZHAO H, FU L, REN L,etal.. Design and experimental research of a novel inchworm type piezo-driven rotary actuator with the changeable clamping radius [J].ReviewofScientificInstruments, 2013, 84(1):15006.
[4] 于月民, 冷劲松. 新型压电旋转驱动器的设计与性能测试[J]. 机械工程学报, 2015(8):185-190. YU Y M, LENG J S. Design and performance testing of a new type piezoelectric rotary actuator [J].JournalofMechanicalEngineering, 2015, 51(8):185-190.(in Chinese)
[5] DONG W, SUN L N, DU Z J. Design of a precision compliant parallel positioner driven by dual piezoelectric actuators [J].SensorsandActuatorsA:Physical, 2007,135(1):250-256.
[6] 赵荣丽, 陈新, 李克天. 双柔性平行六连杆微动平台结构的设计及测试[J]. 光学 精密工程, 2015, 23(10):2860-2869. ZHAO R L, CHEN X, LI K T. Design and experiments of micro motion platform based on a pair of flexible parallel six-bar linkages [J].Opt.PrecisionEng., 2015, 23(10):2860-2869. (in Chinese)
[7] 付锦江, 颜昌翔, 刘伟,等. 快速控制反射镜两轴柔性支撑平台刚度优化设计[J]. 光学 精密工程, 2015(12):3378-3386. FU J J, YAN CH X, LIU W,etal.. Stiffness optimization of two-axis flexible supporting platform for fast steering mirror [J].Opt.PrecisionEng., 2015(12):3378-3386. (in Chinese)
[8] NA T W, KANG D H, JUNG J Y,etal.. Linear-to-rotary motion converter using asymmetric compliant mechanics and single-crystal PMN-PT stack actuator [J].JournalofIntelligentMaterialSystemsandStructures, 2014,25(18):2221-2227.
[9] LI C W, MA G, PEI X,etal.. A precise rotary actuator based on small perimeter difference using parallel compliant mechanism [C].MechanismsandMachineScience, 2016:405-417.
[10] SUN X, CHEN W, ZHANG J,etal.. A novel piezo-driven linear-rotary inchworm actuator[J].SensorsandActuatorsA:Physical, 2015,224:78-86.
[11] ZHENG J, AURELIO S, FU M. A novel rotary dual-stage actuator positioner [C].Joint48thIEEEConferenceonDecisionandControland28thChineseControlConference,Shanghai:IEEE, 2009:5426-5431.
[12] EED H, BARSINGERHORN W, DER VRRN J F V. Piezoelectrically driven rotary stage for use in ultrahigh vacuum [J].ReviewofScientificInstruments, 1996. 67(5): 1930-1934.
[13] HUANG H, FU L, ZHAO H,etal.. Note: A novel rotary actuator driven by only one piezoelectric actuator [J].ReviewofScientificInstruments, 2013,84(9):96105.
[14] WANG Y C, CHANG S H. Design and performance of a piezoelectric actuated precise rotary positioner [J].ReviewofScientificInstruments, 2006,77(10):105101.
[15] 温建明, 马继杰, 曾平, 等. 压电旋转驱动器制作及性能测试[J]. 光学 精密工程, 2013,21(1):131-136. WEN J M, MA J J, ZENG P,etal.. Machining and functional testing of piezoelectric rotary actuator [J].Opt.PrecisionEng., 2013,21(1):131-136. (in Chinese)
[16] 王寅, 孙梦馨, 黄卫清, 等. 双足步进作动压电直线电机的工作机理及试验[J]. 振动·测试与诊断, 2015(2):388-393. WANG Y, SUN M X, HUANG W Q,etal.. Principle and experimental research on piezoelectric linear stepping motor with double driving feet [J].JournalofVibration,Measurement&Diagnosis, 2015(2): 388-393. (in Chinese)
[17] 陈西府. 摩擦驱动型非共振压电叠层直线电机的研究[D].南京:南京航空航天大学,2014. CHEN X F.ResearchonFrictionDriveTypeNon-resonancePiezoelectricStackLinearMotors[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014. (in Chinese)

黄卫清(1965-),男,江苏南通人,博士,教授,博士生导师,1987年、1990年于南京航空航天大学分别获得学士、硕士学位,1999年于香港理工大学获得博士学位,主要从事超声电机技术研究。E-mail: mehwq@nuaa.edu.cn

陶 杰(1990-),男,江苏宿迁人,硕士研究生,2013年于重庆科技学院获得学士学位,主要从事压电精密驱动方面研究。E-mail: taojiemech@nuaa.edu.cn
(版权所有 未经许可 不得转载)
Modeling and experiment of precision rotary positioner with large stroke driven by non-resonant piezoelectric motor
HUANG Wei-qing1, TAO Jie1*, SUN Meng-xin1, WANG Yin1,2, LU Qian1
(1.State Key Laboratory of Mechanics and Control of Mechanical Structure,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,China;2.CenterforPrecisionMeasurementTechnologiesandInstruments,HuaqiaoUniversity,Xiamen361021,China)
A precision rotary positioner with a large stroke driven by the non-resonant piezoelectric motor was proposed to solve the problem of short stoke, complicated structure and control of the precision positioner in optical waveguide packaging. The precision rotary positioner could meet the needs of large stroke and high precision by two driving modes of continuous actuating and stepping actuating. Firstly, the dynamic model of the rotary positioner was established and the kinematics formula of system was presented. Then, the principle of movement was analyzed and the impact factors of rotate speed were researched. Finally, the characters of rotate speed, step displacement, resolution and load were tested, and driving modes of continuous actuating and stepping actuating were discussed. The experimental results indicate that the top speed of precision rotary positioner reaches about 47 963.2 μrad/s at the driving sinusoidal voltage in a peak-peak value of 120 V, an offset of 60 V and a frequency of 180 Hz. Moreover, the rotary resolution of precision rotary positioner is about 3 μrad and the maximum load is 60 g. This precision rotary positioner has characteristics of large stroke, high precision, simple structure, stable controllability and fast response. As compared with the existing precision rotary positioner, the new one presented in the paper has more larger stroke, higher precision, simpler structure and is more convenient to be assembled, adjusted, and produced in batch.
rotary positioner with large stroke; non-resonant piezoelectric motor; precision positioning; waveguide packging
2016-05-12;
2016-06-25.
国家自然科学基金资助项目(No.51375224);国家自然科学基金重大研究计划资助项目(No.91223201);国家自然科学基金青年基金资助项目(No.51405420); 江苏省自然科学基金青年基金资助项目(No.BK20140474);江苏高校优势学科建设工程资助项目
1004-924X(2016)11-2712-09
TH703;TP273
A
10.3788/OPE.20162411.2712
*Correspondingauthor,E-mail:taojiemech@nuaa.edu.cn
