基于FSA-ACO混合改进算法的蜗轮蜗杆故障识别
2016-12-19朱灵康高国伟
杨 雷,朱灵康,高国伟,许 恺,杨 晗,金 昊
(上海理工大学 机械工程学院,上海 200093)
基于FSA-ACO混合改进算法的蜗轮蜗杆故障识别
杨 雷,朱灵康,高国伟,许 恺,杨 晗,金 昊
(上海理工大学 机械工程学院,上海 200093)
针对蜗轮蜗杆故障诊断问题,提出基于FSA-ACO混合改进算法的蜗轮蜗杆故障识别的研究方法。该方法提出了FSA-ACO混合改进策略,在谋求一个优势互补的基础上,对算法相关参数优化。同时针对该算法与蜗轮蜗杆故障识别结合构建算法模型问题,提出利用近邻函数准则作理论桥梁策略,寻找一种新的基于FSA-ACO混合算法的蜗轮蜗杆故障诊断技术研究方法。以WPA40型号的蜗轮蜗杆为测试对象,验证了该研究方法的可行性和有效性。
蜗轮蜗杆;鱼群算法;蚁群算法;故障识别;近邻准则
在蜗杆传动时,由于蜗轮蜗杆摩擦严重,发热大、产生高周疲劳,发生齿轮面点蚀、剥落、及轮齿疲劳折断等故障[1]。可能会带来不可预知的经济损失、人身安全等灾难性后果。因此,蜗轮蜗杆减速器的状态监测与及时故障诊断,不仅能增加减速机的使用周期,减少其维修时间,同时还能降低维修费用和事故发生率。
近年来,国内外学者致力于设备的状态检测与故障诊断技术的研究,将ANN(人工神经网络)等智能算法应用于蜗轮蜗杆的故障识别,取得较好的成果,但现阶段将鱼群及蚁群对蜗轮蜗杆故障识别方法研究较少。即本文对鱼群和蚁群两种算法提出混合改进策略,并利用近邻函数准则的聚类问题将该算法与蜗轮蜗杆故障识别有机地结合策略,寻找出一种基于改进FSA-ACO的故障优化识别处理的诊断方法[2-7]。
1 FSA-ACO算法的混合改进
算法初期利用鱼群算法有较快的收敛品质,避免算法初期过早集结到信息素浓度高的路径上,如图1所示。后期引入蚁群算法混合策略,不仅增强了算法的全局寻优和邻域搜索能力,且避免限于局部最优解,实现各算法之间的优缺点互补。如基于TSP问题的图2蚁群算法迭代过程所示。又因两算法遵循的运动规律具有一定的相似性,即人工鱼随着拥挤度浓度高的方向游动,蚂蚁随着信息素浓度高的方向迁移,同时在人工鱼的聚群行为及蚂蚁的更新信息素均取决于伙伴中心或最优个体状态的最优解[3]。综上所述,FSA及ACO算法融合是行之有效的。
将两者算法混合后,利用鱼群的觅食行为,聚群行为和将全局搜索范围缩小。拥挤度与信息素的相似性,在范围缩小后,将其过度到蚁群算法,通过其分布并行式计算和启发式搜索方式,不仅提高收敛速度,还能适当提高收敛的精度,在一定程度上克服局部极值的问题。

图1 鱼群算法寻优过程
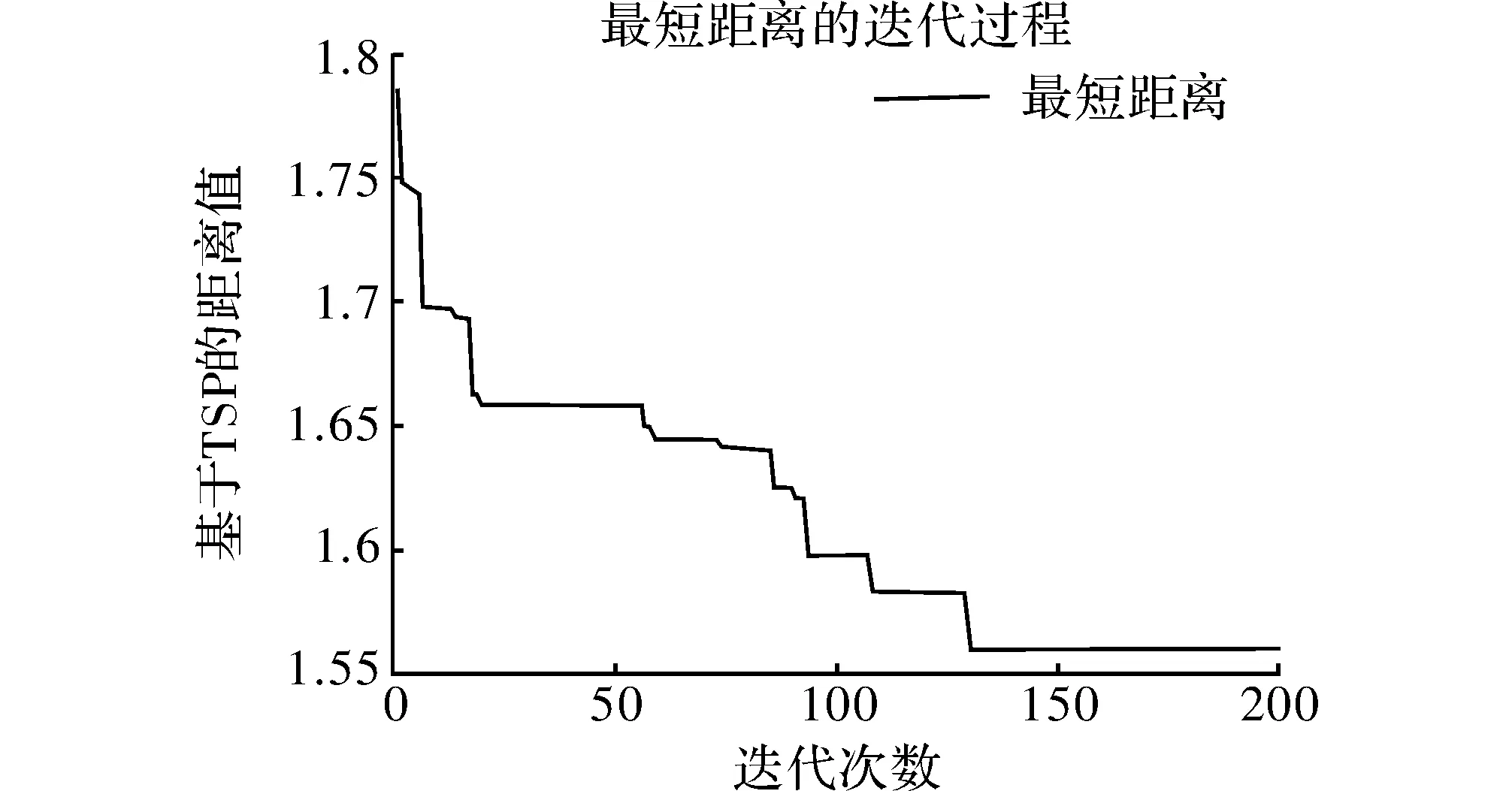
图2 蚁群算法迭代过程
2 基于FSA-ACO的故障识别算法
2.1 蜗轮蜗杆的故障识别
本文蜗轮蜗杆是基于振动信号分析与处理的故障识别方法来完成的故障诊断,如图3所示。即通过传感器采集蜗轮蜗杆减速器传动的振动信号,进而对获得的信号经过分析和处理,提取其中与故障类型判别有关的特征向量,再根据所提取得到的故障特征按照某种规律对故障的形态、部位和原因作为样本进行定位、训练和分类,最后构造某种机器学习算法,形成一个诊断网络去识别故障[10-13]。

图3 蜗轮蜗杆传动故障诊断流程图
基于FSA-ACO混合改进算法的蜗轮蜗杆故障识别可看作一种模式识别,通过测量一些过程参数,然后利用改进的FSA-ACO算法建立一个从测量集合到故障集合的映射关系,从而实现蜗轮蜗杆的故障识别。在蜗轮蜗杆系统发生故障时,其运转与正常状态下是不同征兆的集合,这些不同的征兆对应不同的振动信号特征[2]。
2.2 近邻函数准则
设D={D1,D2,…,DN}为被测系统所有故障的非空有限集合,F={F1,F2,…,FM}为故障集合D引发的所有征兆的非空集合[2]。在蜗轮蜗杆故障诊断中,对故障特征的提取后,征兆集合F中的各个元素与故障集合D是一种复杂的、非比例的对应关系,即其征兆F不能用简单的函数关系或核函数来映射故障D,进而本文引入近邻函数准则策略解决上述故障分类映射问题,同时有效地解决如何在FSA-ACO混合改进的算法与蜗轮蜗杆故障识别联系及融合问题[2-6]。
对于数据集中的任何两个样本yi,yj,若yj是yi的第N个近邻,则称yj对yi的近邻系数为N。若yi是yj的第M个近邻,则称yi对yj的近邻系数为M。当yi和yj互为近邻时则近邻系数为0[2]。因此,近邻函数值τij表示为
τij=N+M-2
(1)
在聚类的过程中,规定类内会损失,即当yi和yj被规分同一类时,两者相互“连接”关系,对于每一个这样的连接存在着一个相应的连接损失。这里连接损失规定为这两个样本间的近邻函数值。即总类内损失规定为
(2)
当yi和yj被规分不同类时,两者不存在“连接”关系,即τij=0,即总类间损失规定为
(3)

(4)
进而蜗轮蜗杆的诊断识别问题转化为求解计算聚类结果的准则函数JNN最小值。
3 构建算法的故障诊断模型
3.1 基于改进算法模型的建立
由故障特征提取的每个蜗轮故障样本数据类似于人工蚂蚁将要访问的地点,而每个人工蚂蚁根据样本数据的之间的信息素的大小及近邻函数,以一定的概率适当选择下一个地点的访问,同时加入自身的数据列表里。每只蚂蚁对全部数据样本均进行一次访问,构成一个有序连接路径,在每个数据列表里,每只蚂蚁的数据列表根据其样本之间的近邻函数值的大小打断近邻函数值较大的两个样本数据的连接,同时计算每一类故障之间的连接损失,形成初步蜗轮蜗杆的故障分类。如此循环类推,寻求样本数据之间的连接损失的最小解为终止条件,进而形成最终的蜗轮蜗杆故障分类结果[2-3]。
3.2 算法具体步骤
通过以上分析,本文算法首先通过故障样本数据建立加权欧氏空间,前期利用鱼群算法寻优特点,淘汰部分与加权距离指标所反映 较大的故障样本数据,后期再利用蚁群算法,通过对 的最优解求解,进而获得与映射关系相近的蜗轮蜗杆故障征兆,实现对蜗轮蜗杆的故障特征进行分类识别。FSA-ACO混合改进算法具体步骤如下:
步骤1 算法初始化,设定种群数、感知距离、初始状态位置、循环最大迭代次数、及拥挤度等参数;
步骤2 通过蜗轮蜗杆故障样本数据,建立加权欧氏距离矩阵A,并做近故障样本的邻矩阵M。其中
(5)
Pk为故障征兆样本数据中不同特征的加权因子,Mij为样本yi对yj的近邻函数值;
步骤3构建近邻函数矩阵L,其元素为Lij-Mij+Mji-2。在每条“连接关系间”初始化信息素浓度τij(0)=C,C为拥挤度。其目的是种群觅食的向导融合,促使鱼群算法正常过度到蚁群算法;
步骤4 种群数K(k=1,2,3,…,m)根据加权欧氏空间里被测数据加权距离指标的对应点,通过鱼群算法对该点的觅食行为、聚群行为,淘汰部分故障样本数据的搜索,其目的是简化后期求JNN的最优解,提高寻优的效率;
步骤5种群数K(k=1,2,3,…,n(n 步骤6 基于精英策略蚂蚁算法改进策略,将信息素进行如下更新 (6) 步骤7 种群按照式 (7) 步骤8 在数据列表里,根据其样本之间的近邻函数值的大小,打断近邻函数值较大的两个样本数据的连接,同时计算每一类故障之间的连接损失,形成初步蜗轮蜗杆的故障分类; 步骤9 重复步骤8操作,直至找到每一只蚂蚁的JNN(k)最小,完成一次故障的识别。取所有蚂蚁中JNN(k)最小的识别结果作为本次循环的求解结果。直至m只蚂蚁都选择这个同一条结果路径或达到指定最大迭代次数为止。 4.1 试验台振动测试系统 采用蜗轮蜗杆WPA40型号为试验对象,对蜗轮蜗杆减速机进行振动测试,搭建如图4蜗轮蜗杆减速机振动测试系统试验台。该试验台上主要由伺服驱动电机、蜗轮蜗杆减速器、磁粉制动器、振动传感器、扭矩传感器、温度传感器、联轴器、NI采集卡及计算机等组成[10-13]。 图4 蜗轮蜗杆减速机振动测试系统试验台 该测试系统中,伺服驱动电机给定输入扭矩6 N·m,转速1 000 rpm,由联轴器连接蜗轮蜗杆减速器的蜗杆,磁粉制动器的加载作为蜗杆传动的负载,结合扭矩传感器测量蜗轮轴的扭矩,并用温度传感器测量蜗轮蜗杆减速机中润滑油的温度。振动传感器通过NI采集卡对减速器的振动信号的采集。再由计算机存储减速器的实时振动信号,给予进一步的时域、频域分析和处理。 在试验时须确保:(1)实验台上的两相连的轴向在一条直线上;(2)装配后需要充分磨合一段时间,同时减速机的润滑油温度达到相对稳定状态后,再进行数据采样和测试;(3)保证运转平稳,各密封处,接合处无漏油,渗油,润滑充分,检查油池和轴承温度;(4)蜗轮齿面初始接触斑点应符合有关标准或设计要求。 4.2 仿真研究 本文基于上述试验对蜗轮蜗杆减速器的振动信号采集,并通过时域、频域分析等方法对其故障特征提取。列出表1不同时域指标与蜗轮故障类型关系。 表1 不同时域指标与蜗轮故障类型关系 上述试验均通过伺服驱动电机给定输入扭矩6 N·m,在转速1 000 rpm时,平行于蜗杆的轴向上不同故障类型减速器信号的特征提取,并通过特征提取获得蜗轮蜗杆传动状态征兆与故障数据样本的映射关系[14]。同时再通过上述试验,采集不同故障的蜗杆输入信号数据。 由所得的蜗轮信号输入测量数据样本,通过特征时域指标提取后,加载到本文算法诊断仿真,其中蜗轮蜗杆时域故障指标X1k,X2k…X7k分别为第K个蚂蚁的平均值、均方差、峰值指标、波形因子、峭度指标、裕度指标、脉冲指标的7个指标参数。任意建立一组加权距离指标:(X1k,X2k),(X2k,X4k),(X3k,X6k,X7k),(X3k,X4k,X5k),(X3k,X5k,X6k,X7k)。结合表1不同时域指标与蜗轮故障类型关系,建立故障样本数据。进而利用算法进一步与蜗轮信号输入测量数据样本测试对比。获得如表2所示的指标对故障征兆诊断正确率。 表2 指标对故障征兆诊断正确率 4.3 试验仿真结果 基于上述分析,该算法在不同时域指标与蜗轮故障类型关系作为样本征兆样本数据时,利用不同的蜗轮信号输入时域图去仿真测试,其结果故障征兆诊断识别的正确率均在84%以上,误差在可接受范围内。其发生误差的原因可能是:实验台上拆装时的轴向间的同轴度较难保证一致,蜗轮蜗杆润滑油内部和油温等不确定因素,在建立故障征兆类型关系初期本身会因其特征提取等因素导致误差存在。针对部分因素需要对其进一步优化,本文旨在论述该方法的有效性和可行性,并且误差在可接受范围。 (1)本文通过测试实验将获得的振动信号经过预处理,及时域、频域分析等方法对其故障特征提取,与本文提出的改进鱼群与蚁群的混合算法去搭建的故障识别模型作比较。实验结果表明,该实验方法的有效性和可行性; (2)本文提供了一种蜗轮蜗杆的故障诊断技术研究方法,仅对时域特征下诊断分析。为后续提出一种利用频域等特征分析提高诊断率的方法。为蜗轮蜗杆的疲劳寿命试验研究打下诊断识别基础,避免拆装减速机,保证试验精度。 [1] 闻邦椿.机械设计手册[M].5版.北京:机械工业出版社,2010. [2] 孙京诰,李秋艳,杨欣斌,等.基于蚁群算法的故障识别[J].华东理工大学报:自然科学版,2004,30(2): 194-198. [3] 修春波,张雨虹.基于蚁群与鱼群的混合优化算法[J].计算机工程,2008,34(14):206-207. [4] 张荣法,李东升,胡佳成,等.蜗轮蜗杆减速机齿形变化故障特征提取方法研究[J].机械传动,2014,38(6):30-33. [5] 李擎,张超,陈鹏,等.一种基于粒子群参数优化的改进蚁群算法[J].控制与决策,2013(6):873-883. [6] 史峰,王辉,胡斐,等.Matlab智能算法30个案例分析[M].北京:北京航空航天大学出版社,2011. [7] 陈长征,张省,虞和济.基于神经网络的旋转机械故障诊断研究[J].机械强度,2000,22(2): 104-106. [8] Stutzle T D M.A short conver- gence proof for a class of ant colony optimization algorithms[J].IEEE Trasactions on Evolutionary Computation,2002,6(4):358-365. [9] Zheng Tonglei. Failure analysis and solution of worm and gear in push steel machine[J].Industrial & Science Tribune, 2013, 12(11): 84-85. [10] 郑同雷.推钢机蜗轮蜗杆减速机的故障分析与解决方法[J].产业与科技论坛,2013,12(11): 84-85. [11] Dorigo M,Gambardella L M.Ant colony system:a cooperative learning approach to the traveling salesman problem [J].IEEE Trasactions on Evolutionary Computation,1997,1(1):53-66. [12] Antoni J.Cyclostationarity by examples[J].Mechanical Systems and Signal Processing, 2009, 23(4):987-1036. [13] Antoni J,Randall R B.The spectral kurtosis: application to the vibratory surveillance and diagnostics of rotating machines[J].Mechanical Systems and Signal Processing,2006,20(2):308-331. [14] 胡劲松,杨世锡.基于自相关的旋转机械振动信号EMD分解方法研究[J].机械强度,2007,29(3):376-379. Worm Gear Fault Identification Based on FSA-ACO Mixed Improved Algorithm YANG Lei, ZHU Lingkang, GAO Guowei, XU Kai, YANG Han, JIN Hao (School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China) A new method for fault identification of worm gears based on mixed improved FSA-ACO (fish swarm algorithm-ant colony optimization) algorithm is proposed. The method first proposes mixed improved FSA-ACO strategies to optimize the relevant parameters of the algorithm in seeking a complementary of advantages. Meanwhile, in constructing the algorithm model that combines this algorithm with fault identification for worm gears, a strategy guideline based on the neighbor function theory is proposed, looking for a new fault diagnosis technology for worm gears based on mixed FSA-ACO algorithm. Worm gears of WPA40 are taken as the test model to testify the feasibility and effectiveness of the research method. worm gear; fish swarm algorithm; ant colony optimization; fault identification; neighbor theory 2016- 01- 19 杨雷(1992-),男,硕士研究生。研究方向:信号处理,智能控制。 10.16180/j.cnki.issn1007-7820.2016.11.038 TP206.3 A 1007-7820(2016)11-133-05

4 算法仿真测试与分析



5 结束语
