上肢康复机器人设计
2016-12-19程秀芳王腾飞李文玉
程秀芳,王腾飞,李文玉
(华北理工大学 机械工程学院,河北 唐山 063009)
上肢康复机器人设计
程秀芳,王腾飞,李文玉
(华北理工大学 机械工程学院,河北 唐山 063009)
机构;康复训练;安全限位;运动空间
随着脑卒中患者的增多,由脑卒中引起的偏瘫受到越来越多的关注。上肢偏瘫严重影响着患者的生活,由于传统治疗方法存在局限性,所以出现了新的康复领域-康复机器人。设计了一款能满足患者肘关节屈、伸运动和前臂旋前、旋后运动的机械机构。
引言
脑卒中也称脑中风,是由于脑部血液循环障碍引起的神经系统损伤。尽管脑外科手术技术在不断进步,患者的死亡率在逐渐降低,但是由脑中风造成的偏瘫患者逐年增多,且多数偏瘫患者失去了生活自理能力,因此给家庭和社会带来了极大的负担。传统的治疗方式是医师和患者进行一对一的单独训练,这种方法效率低,价格比较昂贵,一般家庭难以承受。而且不同医师的治疗水平不同,很难保证每个患者都能得到高效的康复训练。康复机器人是将机器人技术引入到康复医学领域的产物,与传统的康复训练方法相比,康复机器人的出现使医师从繁重的体力劳动中得以解放,不仅减弱了人为因素的影响,提高了康复训练的效率,而且随着人机接口研究的深入,医师还可以根据接口反馈出来的信息进行康复方案的改进,更有助于偏瘫患者的康复训练。
上肢运动功能障碍对患者的日常生活影响很大,所以对上肢康复机器人的研究显得尤为重要。目前多数康复机器人比较庞大,患者只能在医院进行康复训练。针对这些问题,该项研究设计了可以穿戴在患者身上的上肢康复机器人,帮助患者实现肘关节屈伸运动和前臂旋前、旋后运动,患者既可在医院又可在家中进行康复训练。
1 机构总体设计方案
1.1 上肢康复机器人的设计要求
由于设计的康复机构直接作用于患者的肢体,所以首先应满足安全性的条件,防止因为康复训练给患肢带来二次伤害。设计的康复机构要求能适应不同患者肢体的长度,所以设计的康复机构要设有调节件。患者在不同的康复阶段,其运动的范围也有所不同,设计的康复机构要满足患者不同康复阶段的使用。由于患者肢体运动能力的丧失,所以必须考虑增加支撑患者肢体的结构。为了便于康复机构的推广,设计的机构尽量满足经济性要求。还要保证机器人的运动空间和人体上肢的运动空间相一致。
1.2 上肢康复机器人的设计构想
要保证康复机器人的轻便,材料的选择是关键。综合考虑各材料的性能,零件以铝合金作为主要材料。镁为主要元素,添加少量铜、锰、硅、铁等元素的6061-T5铝合金经过热处理后,获得了良好的物理性能、抗腐蚀性能和机械性能,其加工性能优于其他铝合金材料。在康复训练过程中安全是最重要的,所以要在肘关节屈伸和前臂旋转设定限位装置,防止因康复训练造成患者肢体的二次损伤。肘关节屈伸运动和前臂旋前、旋后运动要求的转矩和速度不同,所以要选择不同的电机分别进行驱动。腕部直齿轮采用扇形结构,便于腕部的固定。
1.3 上肢康复机器人运动范围
患者的肢体运动受限,由于其康复训练是在康复机器人的带动下进行的,所以设计的机器人的运动范围应小于人体正常运动时的范围,表1为上肢康复机器人的运动范围。

表1 上肢康复机器人的运动范围
2 上肢康复机器人的结构设计
2.1 上肢康复机器人基本尺寸
根据中国成年人人体尺寸数据GB10000-88,选择身高为1 750 mm的中年男子为参考进行计算,相关数据如表2所示。

表2 中国成年人人体尺寸数据
考虑到设计的康复机器人应适应不同患者的肢体长度,所以该机构应设有可调节件,根据表2中的数据,在大臂长度取280 mm,小臂长度取220 mm的基础上留有50 mm的余量,通过调节螺栓来调节长度,即机械大臂长度范围为260~310 mm,机械小臂长度范围为200~250 mm。
2.2 电机和减速器的选型
电机是机器人的动力源,选择合适的电机对于康复机器人来说尤为重要。电机的转速太快、转矩太小,所以选择电机的同时要选择配套的减速器,两者配合使用来满足康复机器人低转速、大转矩的要求。
(1)
式中:
ρ—人体密度,kg/m3;
l—长度,mm;
C—周长,mm。
小臂质量:小臂长度l=220 mm,小臂周长C=250 mm,由上式可得小臂的质量m1:
(2)
手和腕部质量:将手和腕部看作一整体,并将其简化为一圆柱体,圆柱体的长度l=180 mm,周长C=165 mm,将长度和周长带入上式中,求得手和腕部的总质量m2:
(3)
给定前臂以18°/s的速度进行旋前80°、旋后80°运动,前臂旋转运动时需要克服小臂、手和腕部的负载阻力,力臂为小臂的直径,故负载转矩T:
(4)
前臂旋转运动时转速可由给定的角速度求得:
(5)
前臂旋前、旋后运动的所需的功率:
(6)
考虑到电机功率的储备系数,选择瑞士Maxon公司生产的28SYK电机,电机相关参数如表3所示。

表3 电机相关参数
注:出轴φ4 mm,L=8 mm,质量M=300 g
给定肘关节屈伸运动时的速度为24°/s,电机需要克服的负载包括患者小臂重量、手和腕部的重量、康复机器人带动肘关节屈伸运动装置的重量以及腕关节电机的重量。由Creo软件可得运动装置的质量m3=0.73 kg,腕关节电机的质量由表3可以得到m4=0.3 kg,上臂处于水平位置时计算上臂的力矩,此时重力的力臂最长,运动装置的质量主要集中在腕关节处,前臂和手也视为集中于腕部,所以力臂的长度取l=220 mm,肘关节屈伸运动时的负载转矩为:
(7)
前臂屈伸时的转速可由给定的角速度求得:
(8)
肘关节进行屈伸运动时所需的功率为:
(9)
考虑到电机功率的储备系数,选择Maxon公司的A-max 32无刷直流电机,电机参数如表4所示。

表4 电机相关参数
注:出轴φ6,L=10 mm,质量M=500 g
2.3 康复机器人的本体结构
康复机器人系统简图如图1所示:
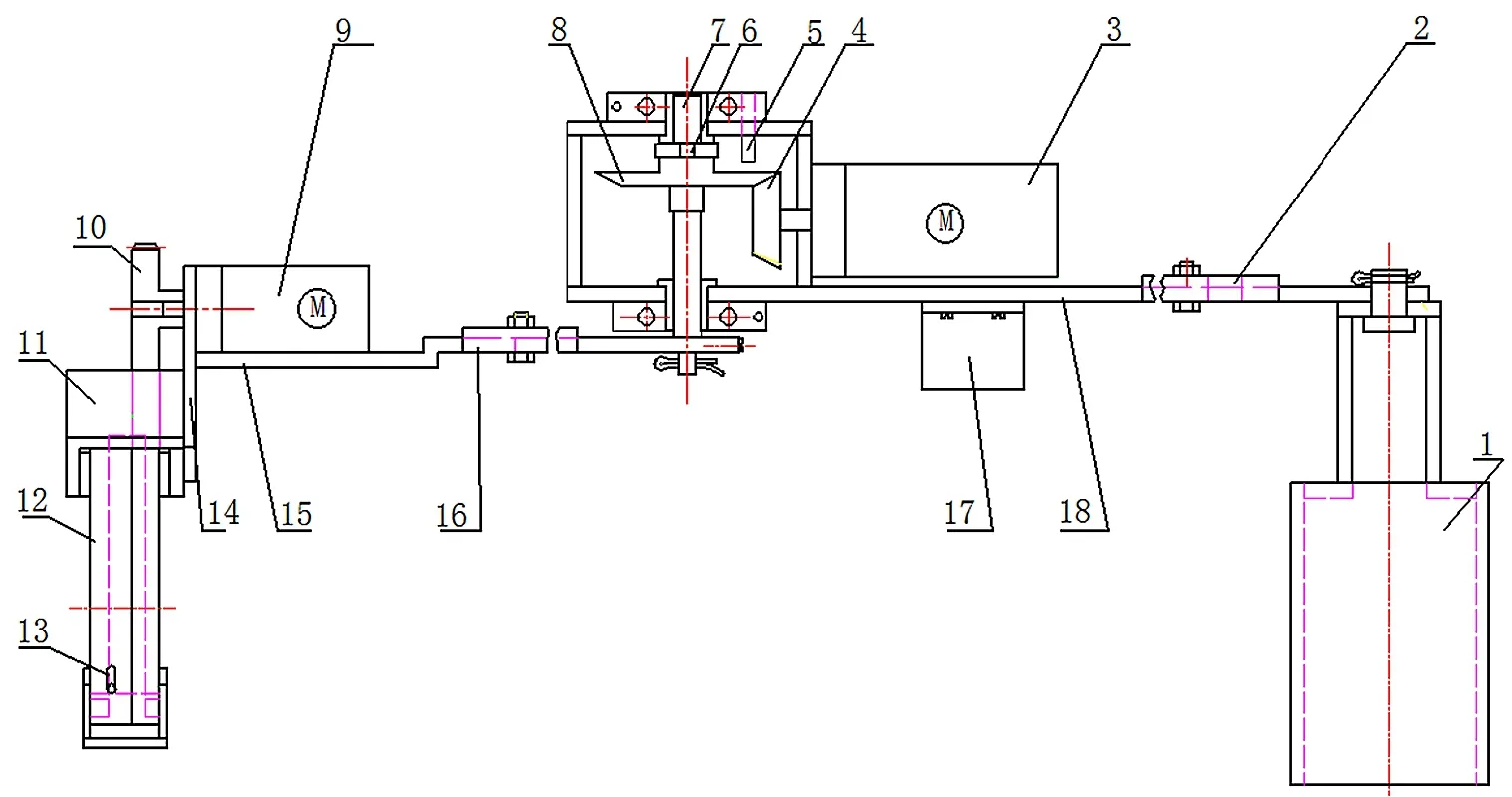
1-肩部支撑;2-上臂长度调节件;3-电机;4-锥齿轮;5-限位销;6-限位挡板;7-轴;8-锥齿轮;9-电机;10-直齿轮;11-导轨;12-直齿轮;13-限位销;14-法兰;15-前臂;16-前臂调节件;17-腕关节绷带固定件;18-上臂。
电机3通过和其配套的减速器驱动锥齿轮4转动,锥齿轮4和锥齿轮8啮合带动轴7转动,轴在转动的同时带动前臂调节件一起转动,实现肘关节的屈伸运动。限位挡板6随着轴一起转动,限位挡板和限位销5一起起到安全限位的作用,改变限位销的位置可以改变肘关节屈伸的角度。
电机9通过和其配套的减速器驱动直齿轮10转动,直齿轮10和在导轨11内的扇形直齿轮12啮合,直齿轮12带动患者的前臂实现的旋前、旋后运动,限位销13随着扇形直齿轮一起转动,当限位销接触到导轨时扇形齿轮停止运动,可起到安全限位的作用。
2.4 传动系统的设计
采用一对直齿轮和一对锥齿轮传动,直齿轮和锥齿轮的精度等级均采用8级,直齿轮的主要参数为:m=1.5 mm,z1=22,z2=88,d1=33 mm,d2=132 mm,i12=3,b1=b2=8 mm。
锥齿轮的主要参数:m=1.5 mm,z1=18,z2=36,d1=27 mm,d2=54 mm,i12=2。
如图2是使用CREO建立的上肢康复机器人3D模型。
图2 上肢康复机器人虚拟样机
3 结论
设计了一种新型上肢康复机器人,其特点是结构简单、穿戴方便、成本低,且符合人体的生理结构,可以很方便地穿戴在患者的肢体上。该装置可以满足患者肘关节屈伸和前臂旋前、旋后的康复训练,可代替治疗师繁重的体力劳动。
[1]赵峰. 上肢康复辅助训练机器人的设计[D]. 西安:西安电子科技大学,2014.
[2]呼昊. 3DOF可穿戴式上肢康复机器人结构设计及仿真研究[D]. 哈尔滨:哈尔滨工程大学,2008.
[2]罗东峰. 桌面式上肢康复机器人控制研究[D]. 西安:中国科学院西安光学精密机械研究所,2012.
[2]梁超. 上肢康复机器人系统的研究与开发[D]. 杭州:杭州电子科技大学,2011.
Rehabilitation Robot Design for Upper Limbs
CHENG Xiu-fang, WANG Teng-fei, LI Wen-yu
(College of Mechanical Engineering, North China University of Science and Technology, Tangshan Hebei 063009, China)
mechanism; rehabilitation training; safety stop; working space
With the increasing number of stroke patients, paralysis caused by stroke has been paid more and more attention. Patient's life is seriously affected by hemiplegia upper limbs. Due to the limitations of traditional treatment methods, rehabilitation robot appeared as a new field of rehabilitation study. A mechanism that is able to meet patient's elbow flexion-extension and forearm pronation-supination was designed.
2095-2716(2016)01-0048-05
2015-09-29
2015-11-25
TH693.9
A