针对一类非线性系统的多变量线性扩张状态观测器及其收敛性分析
2016-12-17刘晓东
刘晓东
针对一类非线性系统的多变量线性扩张状态观测器及其收敛性分析
刘晓东1
针对一类非线性不确定系统,构造了一种多变量线性扩张状态观测器 (Multi-variable linear extended state observer, MVLESO),用于实时估计非线性系统的不确定动态.采用频域分析方法,剖析了所构造的MVLESO在非线性系统不确定动态估计方面的收敛性,并推导出不确定动态的频域估计误差模型.仿真结果表明,所设计的MVLESO可以较为精准地估计出非线性系统当前的不确定动态,该特性为基于MVLESO鲁棒控制方案的有效实施奠定了基础.
非线性系统,扩张状态观测器,自抗扰控制,收敛性,频域分析
在传统线性控制算法中,PID控制器在工业控制中占有重要的地位,然而随着应用广泛性的增加以及现代工业对控制性能要求的不断提高,其存在的缺点不断地突显出来[1],主要体现在较弱的误差衰减能力和抗干扰能力方面.为了克服线性PID控制器的缺点,韩京清提出了一种自抗扰控制(Active disturbance rejection control,ADRC)技术[2−3],这是一种可以实时估计并补偿系统不确定动态的鲁棒控制技术,其不需要精确的对象模型信息,也不需要假设不确定模型为参数线性化或者是有界的,故而可以应对较大范围的不确定系统.目前,ADRC技术已在许多领域得到广泛研究和应用,如高精度伺服系统控制[4−5]、机器人控制[6−7]、飞行器制导与控制[8−11]等,并展示出传统控制方法不可比拟的效果.文献[12−14]已对ADRC的思想、研究现状和发展方向进行了较为详细的综述和展望.
ADRC控制器主要涉及三个部分的设计问题,分别为安排过渡过程、扩张状态观测器(Extended state observer, ESO)设计以及误差反馈控制律设计,而且我们可以根据工程实际需求独立地研究和设计各个组成部分[2].其中,ESO作为ADRC等非线性控制的重要组成部分,可以较为精准地估计出系统当前的未知不确定动态,估计量将被补偿到控制系统中,从而使控制系统的鲁棒性能得到有效提高,同时补偿之后的控制系统结构简单易于进一步的设计与分析.由于ESO在不确定动态估计方面的收敛性将影响到整个闭环控制系统的性能,因此研究其在不确定动态估计方面的收敛性是非常有必要的.
目前,在研究ESO对非线性系统不确定动态估计方面的收敛问题时,大多数文献所选取的研究对象为某类单输入单输出非线性系统[15−18],其系统状态变量间存在微分关系且其扩展状态变量是单维的.此类非线性系统的结构相对简单,故通过时域分析法证明所构建ESO的估计收敛性是可行的.但对于结构更为一般且较为复杂的多输入多输出非线性系统例如典型的飞行器一体化制导控制系统[9]、高超声速飞行器姿态运动系统[11]、航天器姿态动力学系统[19]等,将难以借助时域分析法完成ESO估计收敛性的证明,而目前尚有的时域分析方法和体系也难以发挥其作用,因此针对此类系统有必要从其他思路来探索ESO估计收敛性的分析方法.另一种控制系统的分析方法—频率分析法,可根据系统传递函数得到相应的频率特性,该频率特性具有较明确的物理意义,并可作为分析控制系统性能的依据.当系统阶数较高时,频域分析法避免了直接求解高阶微分方程带来的困难,具有更优越的实用性和方便性,故而在实际工程设计中得到广泛的应用.鉴于此,本文借助于频域分析方法进行相关问题的探索,研究ESO在一类多输入多输出非线性系统不确定动态估计方面的收敛性.
综合考虑估计精准性、控制平滑性以及算法易于实现性[20],本文构建一种多变量线性扩张状态观测器(Multivariable linear extended state observer,MVLESO),用于实时估计非线性控制系统的多维不确定性向量.为了减轻MVLESO的估计负担,文中将系统已知的内部动态引入其构造过程中.同时,本文研究了MVLESO的估计能力问题,分析了在非线性系统确切模型未知但有界的条件下,所设计的MVLESO对系统不确定动态的估计收敛情况,并给出了频域内的估计误差模型.
1 MVLESO设计
针对具有如下形式的非线性系统

假设非线性系统(1)的一部分内部动态是可知的或可测的,且可以近似获得,则式(1)可以改写为


于是,针对非线性系统(1),构造一种MVLESO,用于系统不确定动态的实时估计.


图1 含MVLESO系统结构图Fig.1 Structure diagram of MVLESO-based system
因此,针对非线性系统(1),可以构造如式(4)所示的MVLESO,用于实时估计非线性系统中的多维不确定性向量.
2 估计收敛性分析
本节通过求解传递函数并采用工程上较为实用的频域分析方法,重点分析设计的MVLESO在非线性系统不确定动态估计方面的收敛性,并给出相应的估计误差模型.
根据式(2)~(4),可以得到:



式中,矩阵表达式为而且,In×n表示n阶单位矩阵,0n×n表示n阶零矩阵.
对具有状态空间方程形式的系统(6)进行拉氏变化,可以得到传递函数表达式

式中,Xa(s)和Ua(s)分别为和对应的拉氏变换向量, I2n×2n表示2n阶单位矩阵.
为了求取逆矩阵(sI2n×2n−Aa)−1的解析形式,可以利用如下的矩阵等式:

即 (sI2n×2n−Aa)−1G=I2n×2n,式中,G11(s),G12(s), G21(s),G22(s)均为n阶传递函数矩阵.

通过求解式(9),可以得到G11(s)和G21(s)的解析表达式,即:

不失一般性,观测增益矩阵可取为β0=2βs,β1=βs2,其中βs=diag{βs1βs2···βsn},且βsi>0(i=1,2, ···,n),将其带入上式可得:

根据式(7)和式(11)可得传递函数关系

式中,E1(s),Z2(s)和(s)分别为和对应的拉氏变换向量,各时域/频域向量定义形式如下:

于是,式(12)可以较为直观地展现出输入变量(即实际不确定性向量)与输出变量(即状态估计误差向量与不确定性估计向量)之间的传递关系,它也可表示为如下标量形式:
将s=jω带入上式,可得:

此时,若假设非线性控制系统第i通道所包含动态特性的最大频率为ωmi(rad/s),故当满足βsi≫ωmi时,有如下关系式成立:

上式说明在满足一定条件时,构造的MVLESO对非线性系统状态变量和不确定动态均具有精确的估计能力,即验证了MVLESO在估计方面的收敛性.值得注意的是,参数βsi的选取将决定着MVLESO对第i通道的估计带宽.与此同时,因为在实际控制系统中难以绝对实现条件βsi≫ωmi,因此必然会存在一定的估计误差.
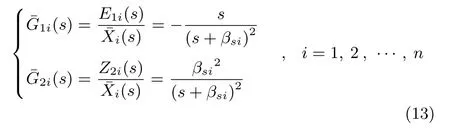
下面具体分析MVLESO对不确定动态的估计收敛情况,首先根据式(12)推导出系统不确定动态的频域估计误差模型,即

类似地,式(16)可以表示为如下标量形式:

以系统第i通道为例,下面给出不同βsi取值时,频域估计误差模型(17)中传递函数的幅频特性曲线图.
由图2可以得出,对于特定取值的增益βsi,估计误差模型传递函数的低频幅值衰减特性较好,表明此时MVLESO的估计能力较强,估计收敛性较好;然而其高频段的幅值衰减特性较差,直至无幅值衰减,此时MVLESO的估计能力较弱,直至估计输出为零,即估计收敛性较差.与此同时,当βsi值增大时,估计误差模型传递函数的幅频特性衰减带宽也随之增大,意味着MVLESO的估计能力增强,估计收敛性也得以改善.
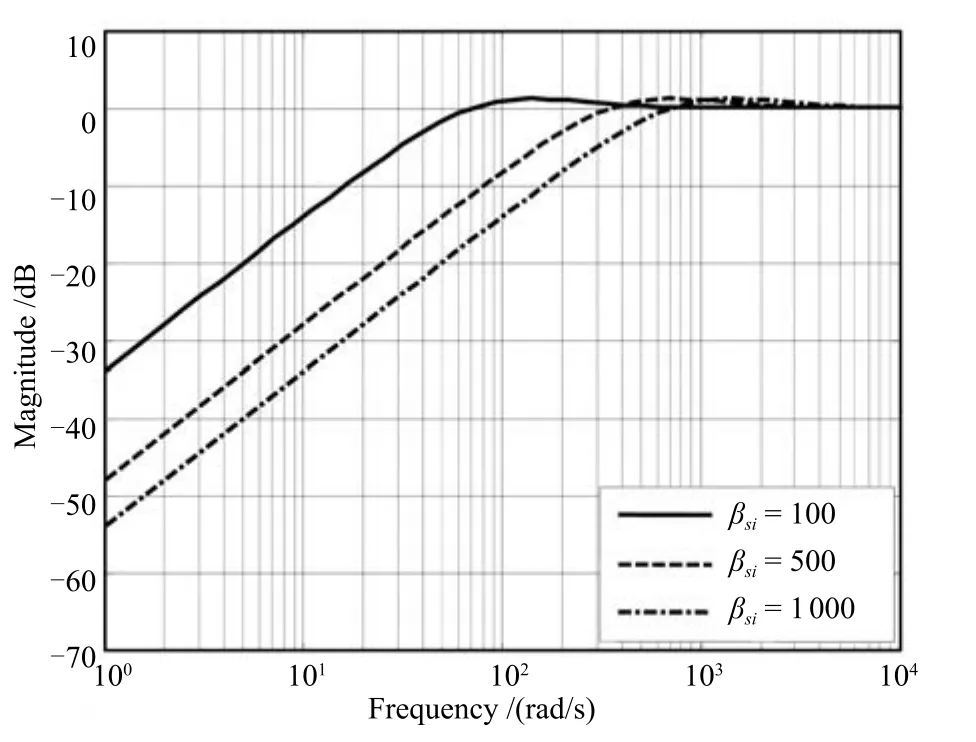
图2 不同βsi取值时估计误差模型传递函数的幅频特性曲线Fig.2 Magnitude-frequency curves of transfer functions in estimation error models with different βsi

对上式进行拉氏反变换,可得到时域响应表达式

进一步,可以得到时域响应的稳态误差为

由此可见,对于阶跃型干扰信号,MVLESO对其估计误差将随时间趋于零.
3 仿真分析
本节通过计算机仿真验证本文构造的MVLESO在非线性系统不确定动态估计方面的有效性和精准性,并通过方案对比分析展现其设计和性能方面的优势.
仿真中,选取的非线性系统如下所示:
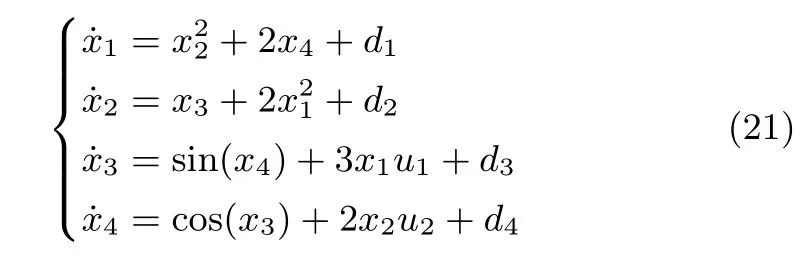
针对所选取的非线性系统,可构造形如式(4)所示的MVLESO,其中

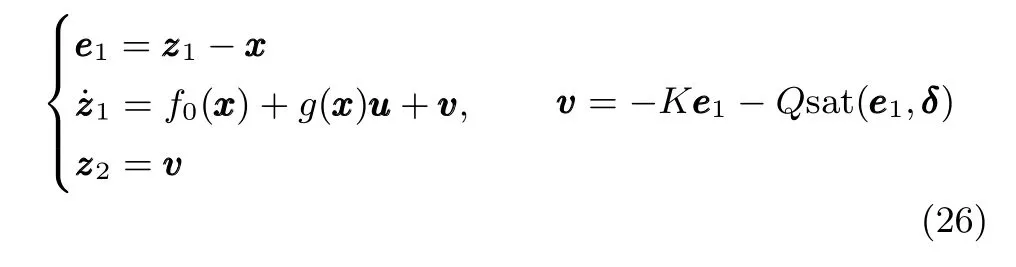
仿真中,对比方案选取为滑模干扰观测器(Sliding mode disturbance observer,SMDO),其基本构造形式如下:

式中,状态观测增益矩阵为K=diag{k1k2···kn},Q=diag{q1q2···qn},且ki>0,qi>0(i=1,2,···,n),向量函数sgn定义为

不失一般性,为了防止符号函数带来的估计量高频抖动问题,此处将采用饱和函数代替式(23)中的符号函数,随之式(22)中的向量函数sgn将替代为向量函数sat,其定义如式(24)和式(25)所示.

式中,边界层向量定义为δ=[δ1δ2···δn]T.这样,原始观测器(22)将转变为改进型滑模干扰观测器(Improved sliding mode disturbance observer,ISMDO),它将作为另外一种对比方案,其构造形式如下:
为了验证MVLESO对时变干扰信号的估计效果,对系统施加控制量

然后,同时加入4个不同的时变干扰信号,并分别选取为
此外,仿真系统的采样步长为0.001s.
本文MVLESO观测增益矩阵选取为

对比方案SMDO观测增益矩阵选取为

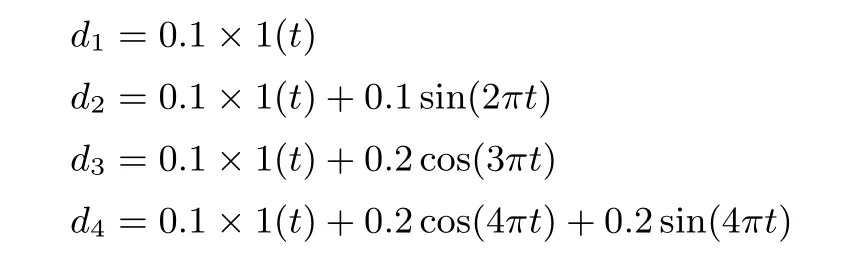
下面首先给出SMDO对4个时变干扰信号的估计曲线,如图3所示.
从图3可以看出,当SMDO中切换项增益取常值时,其对时变干扰的估计曲线中出现高频抖动现象,直观表现出原始SMDO的性能缺陷,进一步体现出引入ISMDO方案的必要性.
采用饱和函数替代符号函数之后,为了从一定程度上降低此处理方法造成的鲁棒性能下降问题,可以适当地提高矩阵Q的元素值,令

下面将对比ISMDO和MVLESO对4个时变干扰信号的估计曲线,如图4所示.

图3 SMDO对各干扰量的估计曲线Fig.3 Estimation curves of different disturbance variables by using SMDO


图4 ISMDO和MVLESO对各干扰量的估计曲线Fig.4 Estimation curves of different disturbance variables by using ISMDO and MVLESO
从图4可以看出,相比原始SMDO方案,ISMDO和MVLESO均可保证干扰估计信号的平滑性.然而,相比ISMDO方案,本文设计的MVLESO可以更为快速、精确地估计出当前的干扰信号值.这样,当采用基于MVLESO干扰补偿的控制策略时,这种特性会大大增强非线性控制系统的鲁棒性能,从而确保控制方案的有效实施.此外,滑模干扰观测器方案在设计时需要预先得知或估计不确定性的上界值,其对干扰的估计精准性在很大程度上依赖于对真实上界值的复现水平,但实际上系统不确定性的上界值是很难预先得知的,采用估计策略实时获取该值也会进一步增加算法的复杂程度和工程实现难度,从而体现出本文MVLESO在设计和性能上的双重优势.
根据之前的分析,采用MVLESO的精准估计并非是绝对的,即势必会存在一定的估计误差,各干扰量的估计误差曲线如图5所示.
此外,仿真还对MVLESO名义估计误差与实际估计误差进行差值比较与分析.对于施加的4种干扰信号,两者的差值结果属于10−15~10−14量级,说明名义估计误差与实际估计误差是完全一致的,进一步体现出不确定动态估计误差模型的正确性.名义估计误差是指直接通过估计误差模型(17)解算出的值,实际估计误差指真实值与估计值之间的差值.


图5 各干扰量的估计误差曲线Fig.5 Estimation error curves of different disturbance variables
4 结论
本文针对一类多输入多输出非线性系统,利用系统部分内部动态构建一种MVLESO,用于实时估计非线性系统的多维不确定性向量.然后,分析其在不确定动态估计方面的有界收敛性,同时推导出频域估计误差模型.计算机仿真结果体现出构造的MVLESO对非线性系统不确定动态的估计精准性,同时验证了本文推导出的频域估计误差模型的正确性.ESO对不确定动态估计误差的有界性,将作为基于ESO闭环控制方案稳定性分析的前提条件.此类MVLESO的构造是在非线性系统(1)状态可测的条件下进行的,当其部分状态不可测时,还需要进一步研究仅基于系统输出信息的MVLESO,关于其构造方法及估计收敛性分析可作为后续研究内容.
1 Wu Lei,Bao Hong,Du Jing-Li,Wang Cong-Si.A learning algorithm for parameters of automatic disturbances rejectioncontroller.Acta Automatica Sinica,2014,40(3):556−560 (武雷,保宏,杜敬利,王从思.一种自抗扰控制器参数的学习算法.自动化学报,2014,40(3):556−560)
2 Han Jing-Qing.Active Disturbance Rejection Control Technique— The Technique for Estimating and Compensating the Uncertainties.Beijing:National Defense Industry Press, 2008. (韩京清.自抗扰控制技术— 估计补偿不确定因素的控制技术.北京:国防工业出版社,2008.)
3 Han J Q.From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics,2009,56(3): 900−906
5 Yao J Y,Jiao Z X,Ma D M.Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping.IEEE Transactions on Industrial Electronics,2014,61(11):6285−6293
6 Ma Hong-Yu,Su Jian-Bo.Uncalibrated robotic 3D hand-eye coordination based on auto disturbance rejection controller. Acta Automatica Sinica,2004,30(3):400−406 (马红雨,苏剑波.基于自抗扰控制器的机器人无标定三维手眼协调.自动化学报,2004,30(3):400−406)
8 Zhu Z,Xu D,Liu J M,Xia Y Q.Missile guidance law based on extended state observer.IEEE Transactions on Industrial Electronics,2013,60(12):5882−5891
9 Xue Wen-Chao,Huang Chao-Dong,Huang Yi.Design methods for the integrated guidance and control system.Control Theory and Applications,2013,30(12):1511−1520 (薛文超,黄朝东,黄一.飞行制导控制一体化设计方法综述.控制理论与应用,2013,30(12):1511−1520)
10 Xiong Shao-Feng,Wang Wei-Hong,Liu Xiao-Dong,Wang Sen,Wu Liang.Impact angle guidance law considering missile's dynamics of autopilot.Control and Decision,2015, 30(4):585−592 (熊少锋,王卫红,刘晓东,王森,武亮.考虑导弹自动驾驶仪动态特性的带攻击角度约束制导律.控制与决策,2015,30(4):585−592)
11 Liu Xiao-Dong,Huang Wan-Wei,Yu Chun-Mei.Dynamic surface attitude control for hypersonic vehicle containing extended state observer.Journal of Astronautics,2015,36(8): 916−922 (刘晓东,黄万伟,禹春梅.含扩张状态观测器的高超声速飞行器动态面姿态控制.宇航学报,2015,36(8):916−922)
12 Huang Yi,Zhang Wen-Ge.Development of active disturbance rejection controller.Control Theory and Applications, 2002,19(4):485−492 (黄一,张文革.自抗扰控制器的发展.控制理论与应用,2002, 19(4):485−492)
13 Xia Yuan-Qing,Fu Meng-Yin,Deng Zhi-Hong,Ren Xue-Mei.Recent developments in sliding mode control and active disturbance rejection control.Control Theory and Applications,2013,30(2):137−147 (夏元清,付梦印,邓志红,任雪梅.滑模控制和自抗扰控制的研究进展.控制理论与应用,2013,30(2):137−147)
14 Gao Zhi-Qiang.On the foundation of active disturbance rejection control.Control Theory and Applications,2013, 30(12):1497−1509 (高志强.自抗扰控制思想探究.控制理论与应用,2013,30(12): 1497−1509)
15 Zheng Q,Gao L Q,Gao Z Q.On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics.In:Proceedings of the 46th IEEE Conference on Decision and Control.New Orleans, USA:IEEE,2007.3501−3506
16 Guo B Z,Zhao Z L.On the convergence of an extended state observer for nonlinear systems with uncertainty.Systems and Control Letters,2011,60(6):420−430
17 Zheng Q,Gao L Q,Gao Z Q.On validation of extended state observer through analysis and experimentation.Journal of Dynamic Systems,Measurement,and Control,2012,134(2): 024505,DOI:10.1115/1.4005364
18 Chen Zeng-Qiang,Sun Ming-Wei,Yang Rui-Guang.On the stability of linear active disturbance rejection control.Acta Automatica Sinica,2013,39(5):574−580 (陈增强,孙明玮,杨瑞光.线性自抗扰控制器的稳定性研究.自动化学报,2013,39(5):574−580)
19 Zhang Hong-Hua,Guan Yi-Feng,Hu Jin-Chang,Wang Ze-Guo.A novel attitude control strategy based on quaternion partition.Acta Automatica Sinica,2015,41(7):1341−1349 (张洪华,关轶峰,胡锦昌,王泽国.分区四元数姿态控制.自动化学报,2015,41(7):1341−1349)
20 Yang Ming,Dong Chen,Wang Song-Yan,Chao Tao.Linear extended state observer based on finite-time output feedback.Acta Automatica Sinica,2015,41(1):59−66 (杨明,董晨,王松艳,晁涛.基于有限时间输出反馈的线性扩张状态观测器.自动化学报,2015,41(1):59−66)
刘晓东 北京航天自动控制研究所高级工程师.2013年获北京航空航天大学博士学位.2013年7月至2015年7月在北京航天自动控制研究所从事博士后研究工作.主要研究方向为飞行器制导与控制,伺服系统控制以及先进控制理论.E-mail:liuxd_aerospace@yeah.net
(LIU Xiao-Dong Senior engineer at Beijing Aerospace Automatic Control Institute.He received his Ph.D.degree from Beihang University in 2013.From July 2013 to July 2015,he was working towards his postdoctoral research at Beijing Aerospace Automatic Control Institute.His research interest covers flight guidance and control,servo control,and advanced control theory.)
Multi-variable Linear Extended State Observer for a Class of Nonlinear Systems and Its Convergence Analysis
LIU Xiao-Dong1
For a class of nonlinear uncertain systems,a multivariable extended state observer(MVLESO)is constructed,and it is employed to estimate the uncertain dynamics of nonlinear system in real time.By means of the analysis method in frequency domain,the convergence property with respect to the estimation on uncertain dynamics of nonlinear system is analyzed.Furthermore,the estimation error model of uncertain dynamics is deduced in the form of frequency domain.Simulation results show that the as-built MVLESO can accurately estimate the current uncertain dynamics in nonlinear systems. This feature lays a foundation for the effective implementation of MVLESO-based robust control scheme.
Nonlinear system,extended state observer(ESO), activedisturbancerejection control(ADRC),convergence, frequency-domain analysis
刘晓东.针对一类非线性系统的多变量线性扩张状态观测器及其收敛性分析.自动化学报,2016,42(11):1758−1764
Liu Xiao-Dong.Multi-variable linear extended state observer for a class of nonlinear systems and its convergence analysis.Acta Automatica Sinica,2016,42(11):1758−1764
2015-10-27 录用日期2016-05-03
Manuscript received October 27,2015;accepted May 3,2016
国家自然科学基金(61403355)资助
Supported by National Natural Science Foundation of China(61403 355)
本文责任编委季海波
Recommended by Associate Editor JI Hai-Bo
1.北京航天自动控制研究所 北京100854
1.Beijing Aerospace Automatic Control Institute,Beijing 100854
DOI 10.16383/j.aas.2016.c150707