地铁高密度行车时救援组织优化
2016-12-16郑晓民
郑晓民
(广州地铁集团有限公司 广州 510430)
地铁高密度行车时救援组织优化
郑晓民
(广州地铁集团有限公司 广州 510430)
通过对广州地铁2号线历年发生的救援事件进行简要统计,得知故障源主要来自牵引控制系统,分析主要故障原因,以及救援组织中存在的主要问题,包括司机不熟悉车辆故障处理指南,调度发布救援命令不及时,现场信息沟通不畅等。结合地铁高密度行车阶段的特点,计算受到救援影响的列车数量并分析晚点情况。有针对性地提出救援组织优化方案,包括优化改造旁路开关;改造断电区;优化救援旅行速度,以减少列车增晚;优化救援路径,避免二次中断;优化救援组织流程,提高效率,尝试“裸车”动车等,并将优化措施应用于广州地铁6号线,取得很好的效果。
地铁运营;高密度行车;救援组织;优化;广州地铁
地铁列车故障救援是地铁运营常见的突发事件之一,故障救援事件对乘客出行的影响越来越大。地铁系统进入2 min的高密度行车阶段后,内外部环境都有了较大的变化,原有的部分组织方式已经不再适合,有必要进行针对性的优化。
1 历年救援案例的统计分析
1.1 车辆故障类型
广州地铁原2号线从2004年开通至2006年,3年共发生11起电客车故障救援事件,其中2004年4起,2005年3起,2006年4起,故障系统分析见表1。

表1 2号线列车故障系统分析
从以上分析知,2号线故障较高的系统是列车牵引控制系统(即110 V控制回路),其原因是该控制回路主要采用继电器或行程开关连接,比较容易出现机械卡滞,导致回路断路,从而直接影响整列车的运行。
1.2 救援动车时间
从11起救援事件中可以看出,中断行车时间在25 min以下的有10件,占总数的91%。随着故障处理能力、行车指挥水平和员工业务素质的提高,列车故障救援的影响时间将不断缩短(详见表2)。
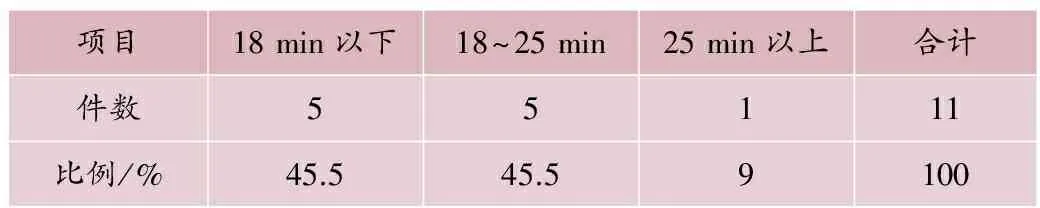
表2 2号线救援中断行车时间比例
1.3 组织救援时的主要问题
1) 司机对《车辆故障处理指南》不熟悉。错误判断、汇报故障类型,或者未严格按《车辆故障处理指南》流程操作,人为失误扩大影响。
2) 救援命令发布不及时、不简洁。在故障处理过程中,行调存在让司机再试一试的心理,没有按节点时间发布救援命令,或发布救援命令时由于命令内容不简洁、不清晰,导致发令时间过长。
3) 现场信息沟通不畅,直接影响到事件处理方向的正确性。主要表现在司机上报的信息前后不一致时没有进一步核实,无线调度台使用全呼频时另一电台无法使用、三方通话不成功等。
2 高密度行车时救援面临的困难
2.1 上线列车逐年增多,行车控制难度增大
随着客流的增长,地铁增加上线列车,运输提升至系统最大能力,高峰期的行车间隔压缩至2 min,30 km的线路上线列车超过45列。2015年广州地铁的1、2、3、5号骨干线路,高峰期的行车间隔都已经达到2~3 min,满载率最高达152%(详见表3)。

表3 2015年10月广州地铁高峰期行车间隔
2.2 救援晚点影响的乘客数量扩大了数倍
假定计划行车间隔4 min,晚点后为避免故障点后方的载客列车在区间滞留,行调将按照每站1列车控制列车间隔,即行车间隔约2 min。救援动车时间20 min,则影响的列车数量见表4[1-3]。

即发生4min间隔20min救援时,救援影响了9列车并程度递减。但是2min间隔时,分母接近0,即高密度行车时救援几乎影响了全 线 列 车,即 若 5号 线 高

表4 晚点影响的列车情况
峰期发生救援,则全线45列车都将受到影响,故障影响扩大了5倍以上。
3 广州地铁6号线的救援组织优化
3.1 优化车辆旁路设计,最大限度避免救援
部分电气、硬线故障无法旁路,广州地铁对其他主要的多项继电器完成了旁路改造以避免救援,结果地铁5号线3年(2013—2015年)无列车救援。
3.2 接触轨断电区改造,减少断电区救援
采用接触轨供电的线路,由于线路上的道岔、人防门等设备限制,接触轨不能连续布置,使得线路上存在全列车无电的地点,列车故障停在接触轨断电区也会导致救援。改造方案是列车每侧转向架上都加装集电靴,或在断电区上方加装架空接触网。广州地铁6号线采用终点站加装接触网的方式,解决了该问题。
3.3 优化救援速度,减少后续列车增晚
3.3.1 6号线救援速度优化
救援列车多数情况是后续列车担任救援[4],连挂后推进运行,救援列车必须切除ATP(列车自动保护系统)改URM(不受限人工驾驶)模式运行,司机凭信号灯显示运行并控制速度。URM列车在线路运行时需人工瞭望进路安全,遇突发情况需人工紧急制动。为确保列车安全,广州地铁规定列车采用URM模式运行时,没有URM监控员添乘时限速为45 km/h,有URM 监控员添乘时限速为60 km/h。
原规章限定救援限速为25 km/h,而优化救援速度到达线路旅行速度,可以避免推进过程中限制后续正常载客列车运行。因为未超过前方列车速度,所以理论上救援列车也不会追尾前方正常列车(见表5)。

表5 广州地铁6号线救援速度优化
3.3.2 车辆设备满足救援提速要求
1) 车钩强度。6号线车钩抗压强度为800 kN,抗拉强度为640 kN,车钩本身抗压能力强于抗拉能力。地铁列车紧急制动减速度为1.2 m/s2(切除1列车制动的救援连挂列车平均减速度明显降低),AW3状态整车重量为200 t,救援AW3载荷列车紧急制动车钩拉力为F=ma=200 t×1 000(t/kg)×1.2 m/s2=240 kN。可见,车钩在最恶劣情况下承受的拉力为240 kN,远小于640 kN的抗拉强度,所以车钩承受能力不影响推进救援限速的提高。
2) 牵引能力。列车采购合同规定“在损失1/2动力时,在AW2状态下,可在60‰的坡道上起动,并能使列车行驶到最近车站”,这已在正线得到验证。
3) 制动距离。救援25 km/h优化至35 km/h后,制动距离增大了96%,但最长制动距离不超过150 m。经核对,6号线进路信号机前的安全瞭望距离基本满足制动距离的要求。部分小曲线半径线路的瞭望距离不良,可以维持25 km/h限速。救援提速后制动距离增加,司机可以采取持续瞭望、进站前提前降低速度等措施进行控制。制动距离详见表6。
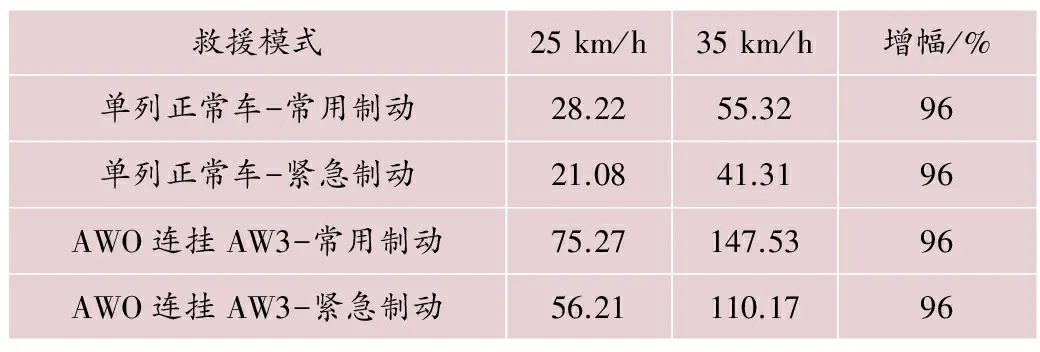
表6 不同救援模式下的制动距离 m
3.3.3 安全注意事项
根据目前状态,救援时客车车钩不使用电气连接,影响列车车载对讲机和前车紧急停车的装置不能使用。在救援过程中,前端瞭望司机与救援车司机将采用手持无线对讲机联系,并由后端司机操纵列车运行,需做好司机提醒,确保救援推送时对讲机状态良好,对紧急情况下救援车组紧急停车操作进行细化要求[5-6]。
3.4 优化救援路径,避免二次中断影响
广州地铁线路设计约每5 km(3至5个站)设置1条辅助线(渡线或者存车线),每10 km设置1条存车线,中间站存车线仅能满足1列车存放[7-8]。优化前的救援方案是组织列救援推进到中间站存车线后摘钩,或者列车救援经渡线折返到邻线(上行或者下行线),发生第二次中断行车约5 min。优化后直接组织救援列车推进到终点站或者车厂,仅故障列车发生故障时所在车站有存车线,且故障列车能够换端凭自身动力动车时才考虑进入中间站存车线。当终点站存车线无法避免二次中断时,配套组织救援车后方列车从起点站空车运行、小交路折返、载客越站等行车调整方案[9],可以有效减少救援影响。6号线救援路径优化详见图1。
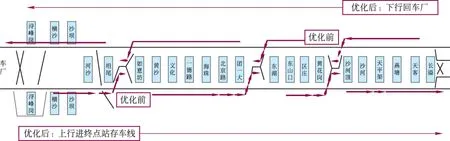
图1 6号线救援路径优化
3.5 优化救援组织流程,控制在15 min以内动车
救援连挂组织进行了优化,取消了之前的办理闭塞进路,规范调度组织确保安全。根据原规章要求,区间列车故障救援时,行调需要发布区间封锁命令,然后办理闭塞进路,组织救援列车进入封锁区域进行救援。优化后行调组织救援车以ATO模式运行到目标点为零,确认进路安全后授权救援列车切除ATP限速25 km/h前往连挂。行调将故障车车尾位置公里标通知救援车,救援车到达故障车前15 m处一度停车,然后再进行连挂。
车辆故障处理阶段简化沟通环节,前4 min的故障处理阶段授权司机进行安全相关操作。司机进行复位开关、旁路开关、转换驾驶模式等操作时不需报行调,相应旁路开关可在确认相应条件满足的情况下进行操作,司机可尝试0.5 m以内动车试验,但不能越过信号机。4~6 min组织进行“裸车”操作(空车加全旁路),最大限度地避免误救援,同时也要准确控制救援动车时间。“裸车”救援优化详见图2。
3.6 救援优化实例分析
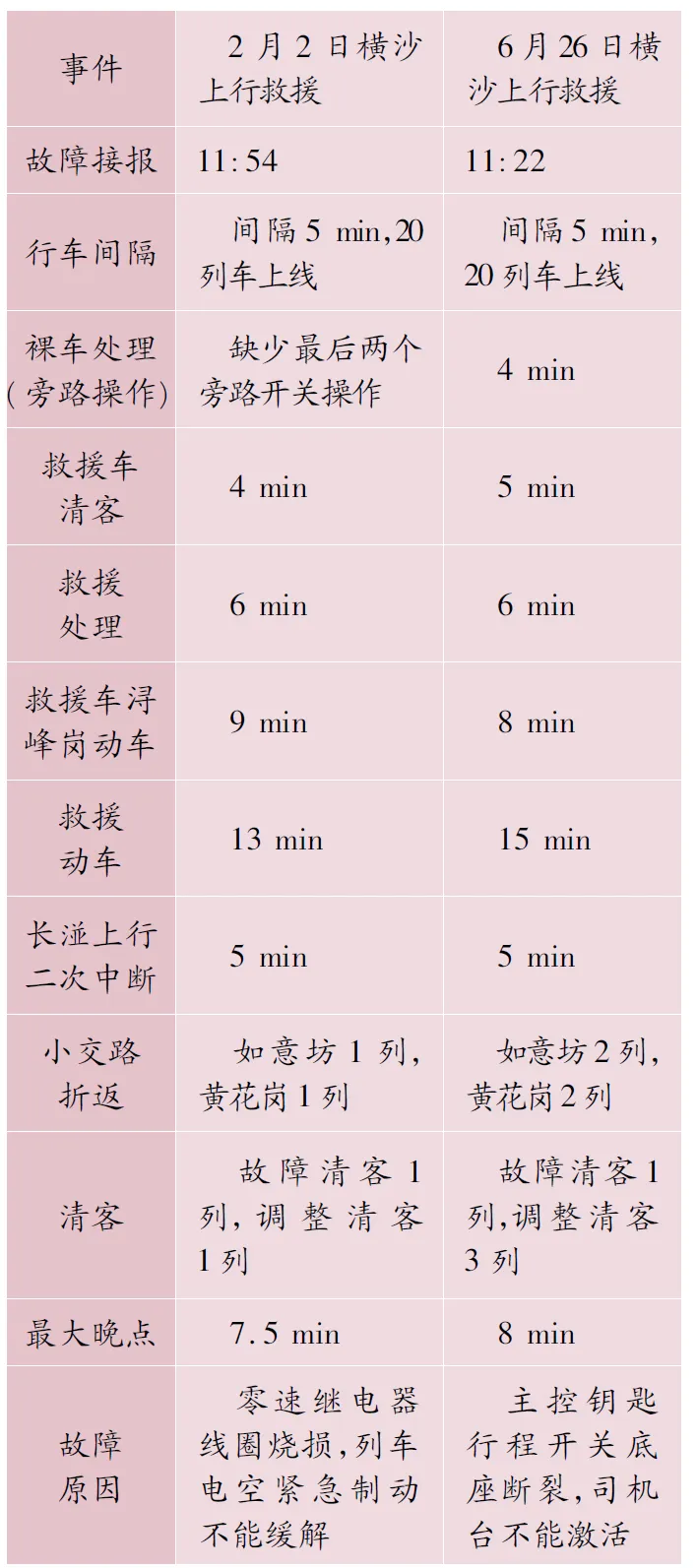
2015年,广州地铁6号发生2次救援事件,2次救援的速度和路径都已经优化,6月26日的救援进一步优化了“裸车”程序和联控用语,2次救援效果对比详见表7。
由表7可以看出:优化救援速度,使得对救援车后方的列车不再增晚,控制在8 min内;优化救援路径,使得中间站没有二次中断晚点,而终点站的二次中断距离故障点时间和空间都比较远,也可以通过小交路折返和空车运行的方式进行缓解;优化“裸车”程序,减少了沟通环节,整体时间控制在15 min内,同时“裸车”程序也能够避免2月2日的误救援。
图2 6 号线“裸车”优化救援流程
表7 2 次救援对比分析
4 结语
救援优化后可以有效减少正线列车晚点,缓解故障期间车站客流压力。优化后对行车各岗位的要求更高,各行车岗位应充分预想,制定细化方案,组织员工培训。在确保安全的前提下,救援优化措施可以提高故障情况下的行车效率,减少故障对运营的影响。
[1] 张国宝.城市轨道交通运输组织[M].北京:中国铁道出版社,2000:83-87.
[2] 毛保华,姜帆, 刘迁,等.城市轨道交通[M].北京:科学出版社,2001:134-137.
[3] 张秀媛,王英. 城市轨道交通客运管理[M]. 北京: 北京交通大学出版社,2011.
[4] 地铁设计规范:GB 50157—2013[S].北京:中国建筑工业出版社,2014.
[5] 梁强升. 提高地铁列车故障救援效率的探讨[ J]. 城市轨道交通研究, 2007,10(8):23-25.
[6] 毛报华.城市轨道交通系统运营管理[M].北京:人民交通出版社,2006.
[7] 谢正光.新形势下北京地铁的运营管理实践与思考[J].现代城市轨道交通,2008(6):9-13.
[8] 谢正光.北京地铁管理模式分析[J].中国铁路,2006(11):25-30.
[9] 侯晓丽,许红.轨道交通运营安全风险预控管理体系的建立[J].都市快轨交通,2016,29(2):18-21.
(编辑:曹雪明)Optimizing Rescue Organization for a Metro System with High-density Operation
Zheng Xiaomin
(Guangzhou Metro,Guangzhou 510430)
The historical data on metro rescue emergency were statistically analyzed, based on which the main reasons about rescues were identified, as well as the main problems were presented including drivers being unfamiliar with the vehicle fault manual, delayed dispatch release, unclear information, etc. Considering the characteristics of the metro system with high-density operation, the trains and their corresponding delays due to rescue were calculated in detail. Based on the abovementioned, the corresponding optimization measures were proposed, including optimizing the running speed and route for the rescue vehicle, adjusting the rescue procedure, etc. These measures were applied to Line No.6 of Guangzhou Metro.
metro operation; high-density operation; rescue organization; optimization;Guangzhou metro
10.3969/j.issn.1672-6073.2016.04.015
2016-03-08
2016-03-29
郑晓民,男,大学本科,工程师,从事地铁运输管理工作,xmzheng2000@126.com
F530.7
A
1672-6073(2016)04-0067-04