数控机床高速无轴承异步电动机悬浮子系统RBFNN逆独立解耦控制
2016-12-15孙宇新钱忠波
孙宇新, 钱忠波,2
(1.江苏大学 电气信息工程学院,江苏 镇江 212013;2.华域汽车电动系统有限公司 技术研发部, 上海 200120)
数控机床高速无轴承异步电动机悬浮子系统RBFNN逆独立解耦控制
孙宇新1, 钱忠波1,2
(1.江苏大学 电气信息工程学院,江苏 镇江 212013;2.华域汽车电动系统有限公司 技术研发部, 上海 200120)
为了实现对数控机床用高速无轴承异步电动机(Bearingless Induction Motor, BIM)动态解耦控制以实现降低悬浮电主轴抖动,提出了一种基于径向基函数神经网络(Radial Basis Function Neural Network, RBFNN)的悬浮子系统自适应独立控制方法。首先,基于RBFNN构建了气隙磁链观测器,因为RBFNN具有较强的自学习和自适应能力,所以辨识的气隙磁链较为精确;其次,基于Hamilton-Jacobi-Isaacs (HJI)原理设计RBFNN逆系统鲁棒控制器,应用基于HJI不等式的RBFNN辨识系统模型不确定和外界干扰,提高系统的稳定性,悬浮子系统动态独立解耦控制得以实现;最后,将磁链辨识器和逆系统鲁棒控制器组成双RBFNN悬浮子系统逆独立控制系统。仿真和实验结果表明,采用该控制方法BIM系统能获得良好的动、静态性能。
无轴承异步电动机;解耦控制;径向基函数神经网络;磁链辨识;鲁棒控制器; 数控机床
依靠转矩绕组和悬浮力绕组产生磁场的共同作用,无轴承异步电动机(Bearingless Induction Motor, BIM)可以实现其鼠笼转子的稳定悬浮,具有结构简单、易于弱磁、可靠性高等优点,非常适合在注入高速精密数控机床、高压密封泵等高速驱动的高新技术领域,因而受到了国内外学者的广泛关注。然而,BIM的多套绕组之间存在复杂的电磁关系,使得解耦控制成为了实现BIM稳定的悬浮和转矩输出关键问题。
自BIM被提出以来,众多专家学者已经对悬浮力和转矩解耦控制进行了大量的研究。转矩绕组气隙磁场定向控制方法是目前控制无轴承异步电动机较为成熟的控制方法之一,但该方法需要在两套绕组控制子系统之间传递转矩绕组的气隙磁链信息,所以并没有实现真正意义上的独立解耦控制[1],而且因其本身机理的制约而存在最大转矩限制[2],从而影响其在重载和大功率功率条件下的应用。此外,逆系统、支持向量机和静态神经网络方法也被陆续应用到非线性系统解耦控制中[3-7]。然而,传统逆系统解耦控制方法需要获得被控对象的精确数学模型,而无轴承异步电动机属于多变量、非线性、强耦合系统,其数学模型随其运行状态随时发生改变,导致传统逆系统方法很难在实际中得到应用。基于静态神经网络的逆系统解耦控制方法能够使无轴承异步电动机系统获得良好的动静态性能[8],但其系统结构复杂,输入变量多,实现相对困难。文献[9]提出将滑模观测器应用到无位置和无速度传感器控制中,摆脱了传统基于电机模型的无速度、无位置传感器对电机参数的依赖,增强系统的鲁棒性能。文献[10]对短路容错控制在无轴承永磁同步电机中应用进行了可行性分析,为提高无轴承电机控制安全性和鲁棒性提供了一条新的思路。文献[11]提出了一种悬浮子系统独立控制的方法,通过电压模型辨识方法辨识出悬浮绕组独立控制条件下的转矩绕组气隙磁链幅值和相位,使转矩绕组摆脱悬浮原理约束,提高了调速方法的灵活性。更为重要的是,这种方法不仅能够实现悬浮力和转矩之间解耦,使得BIM具有良好的动静态性能,而且该方法具有算法简单、极易实用化的特点。但是该方法存在积分环节固有的初值误差和直流偏移问题,使其在低速环境下磁链辨识不够精确,从而影响对电机运行的稳定控制,鲁棒性和自适应能力有待进一步提高。
针对上文所述传统悬浮子系统独立控制存在的缺点,本文提出了一种基于径向基函数(Radial Basis Function Neural Network, RBFNN)悬浮子系统逆独立控制方法。该方法通过基于RBFNN的气隙磁链辨识器辨识出实现独立控制所必须的精确气隙磁链,并构建了基于Hamilton-Jacobi-Isaacs (HJI)不等式原理的RBFNN鲁棒控制器,实现悬浮绕组子系统的独立控制,使控制系统具有更强的抗干扰能力;转矩绕组子系统则通过普通变频器控制,增强了控制方法的实用性。仿真结果表明该独立控制方案能够使无轴承异步电动机系统具有良好的控制性能和较强的鲁棒性。
1 无轴承异步电动机基本机理
1.1 基本原理
BIM集磁轴承和电机功能为一体,能同时实现转子悬浮和旋转功能,是特种传动应用领域无轴承支承运行中最具有发展前途的方案之一[12]。从结构上分析,无轴承异步电动机是通过在原有的定子绕组中添加一套径向力绕组,通过两套不同极对数绕组磁场的相互作用,改变异步电机气隙合成磁场的对称分布,在转子上产生可控径向力,实现转子的稳定悬浮和旋转。
悬浮绕组的引入打破了电机原有旋转磁场的平衡,使得电机气隙中一个区域里的磁场增强,其对称区域的磁场减弱,产生的麦克斯韦力指向磁场增强的方向。如图1所示,分别向转矩控制绕组和悬浮控制绕组中通入电流I1和I2,产生磁链ψ1和ψ2。在忽略负载情况下,由于在气隙上侧ψ1和ψ2同向,合成磁密会增加;在气隙下侧ψ1和ψ2反向,则合成磁密就会减少,从而磁拉力的分布发生改变,产生沿y正方向的径向悬浮力Fy。在悬浮控制绕组中通入反向电流,可产生沿y负方向的径向悬浮力。同理,沿x轴方向的径向悬浮力Fx可以通过在悬浮控制绕组中通入与I2垂直的电流获得。
1.2 径向悬浮力数学模型
当悬浮绕组的极对数P2与转矩绕组极对数P1满足P2=P1+1时,洛伦兹力(下文中其大小用F1表示)和麦克斯韦力(下文中其大小用Fm表示)方向相同,令F=Fm+Fl为悬浮力的可控分量,在d,q轴旋转磁场坐标系下的用磁链表示的悬浮力公式
(1)
式中:ψd1,ψq1为气隙磁链分量;K=Km+Kl,Km为麦克斯韦常数,Kl为洛伦兹力常数;下标1,2分别为对应转矩绕组和悬浮控制绕组;下标s,r分别为对应定子和转子分量。
当转子发生偏心时,因气隙不均匀造成气隙磁场的不平衡会产生偏心磁拉力,这是一种固有的麦克斯韦力,其表达式为:
(2)
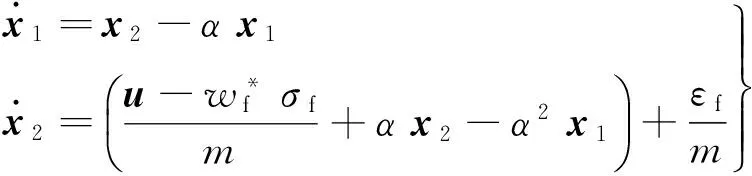
传统BIM径向悬浮力模型多基于理想情况下建立,从而忽略了系统模型不确定性和外界干扰。本文将系统模型不确定性和外界干扰考虑其中,转子在径向力和外界力作用下的位移运动方程表示为:
(3)
式中:m为转子质量;dx、dy为模型不确定性以及外界干扰。
对气隙磁场进行定向控制,则有
ψd1=ψ1,ψq1=0
(4)
将式(4)代入式(1)可简化为:
(5)
由式(5)可以得出悬浮绕组电流与悬浮力之间关系,根据悬浮绕组电压、电流之间非线性关系再映射出Ud2s、Uq2s。上述模型为下文控制器设计提供了理论基础。
2 基于RBFNN的气隙磁链辨识方法
由于径向悬浮力的控制只与转矩绕组气隙磁链的幅值和相位相关,因此若能有效地探测或辨识该磁链的幅值和相位,便能够实现悬浮子系统的独立控制[11]。因此,对气隙磁链幅值和相位的精确辨识是能够实现独立控制的关键。
2.1 转矩绕组气隙磁链数学模型
转矩绕组的定子磁链在静止等效α、β坐标系下有:
(6)
式中:ψα1s、ψβ1s分别为定子磁链在α、β轴方向分量;Uα1s、Uβ1s分别为定子电压在α、β轴方向分量;iα1s、iβ1s分别为定子电流在α、β轴方向分量;R1s为转矩绕组的定子电阻。
转矩绕组气隙磁链在α、β坐标系中满足
(7)
式中:L1sl为转矩绕组的定子漏感。
2.2 气隙磁链辨识及离线训练方法
传统电压模型法通过式(6)、式(7)计算气隙磁场的幅值和相位时,由于纯积分环节的直流增益为无穷大,辨识精度必然会影响。为了提高辨识精度以及增强自学习和泛化能力,本文提出了一种新颖的基于RBF神经网络气隙磁链辨识方法。
首先通过对BIM进行气隙磁场定向控制,通过带高通滤波器和坐标变换环节的气隙磁链观测器辨识得出气隙磁链数据,已有实验证明该辨识方法具有良好的精度[13]。记录在各个状态下的气隙磁链在α、β轴分量,再通过对离散的数据进行处理分析,选取若干组稳定数据按如下步骤进行RBF神经网络训练:
j=1,2,…,m
(8)
式中:bj为为一个正值标量,表示高斯基函数的宽度,m是隐层的节点数量。
(9)
式中:ωj_i是隐层第j个输出到网络第i个输出的权值。
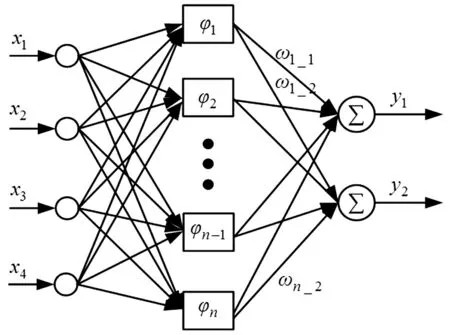
图2 RBFNN拓扑结构图Fig.2 Topological structure diagram of RBFNN
(2) 计算误差‖E(i)‖=‖Z(i)-y(i)‖,式中Z(i)为目标输出,即系统经采样调理后的数据,yi)为网络实际输出。并计算出样本与已存在的隐层的距离
dj=‖x(i)-cj‖,j=1,2,…,m
(10)
式中lm为已存在的隐层单元个数。
令
dmin=min(dj)
(11)
(3) 令λ(i)=max(λmaxγi,λmin)
若
‖Ei‖>ε,dmin>λ(i)
(12)
式中:ε为网络期望的精度。λ(i)为第i个输入时网络的拟合精度,随着学习的进行λ(i)从λmax减小到λmin。γ为衰减因子,0<γ<1。
则增加一个隐层单元,其参数为:
ck=xi
(13)
(14)
式中:cj为离输入样本最近的p个隐层单元的中心,这里取p=2。
(4) 否则,就按递推最小二乘法调节网络连接权。
(6) 输入第i+1组样本,重复上述过程。
最终,训练至误差满足要求时,训练完成的RBF神经网络即为气隙磁链的辨识器。
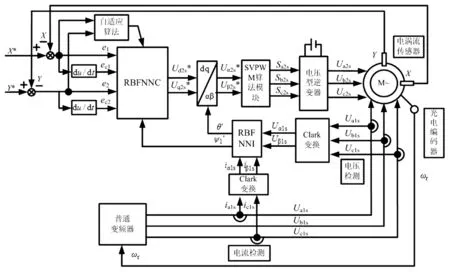
图3 双RBFNN自适应悬浮子系统独立控制系统框图Fig.3 Adaptive levitation subsystem independent control system with double RBFNN
3 独立解耦控制系统
3.1 鲁棒控制器设计
将HJI不等式应用于神经网络鲁棒控制器中,能有效改善系统稳定性[16],因此本文提出一种基于HJI不等式原理的RBFNN逆系统鲁棒控制器,通过RBFNN辨识系统模型不确定因素以及外界因素,并基于HJI不等式原理构建悬浮子系统的逆系统,以实现对BIM悬浮子系统的独立解耦控制。
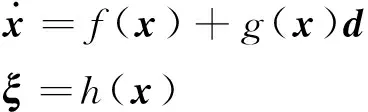
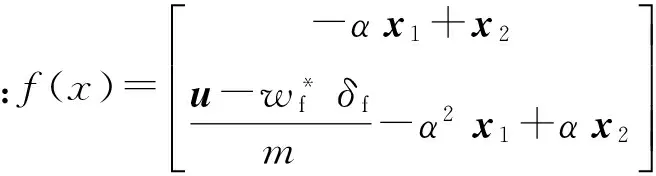
将闭环系统式(3)改写为向量形式
(16)
式中:z为位移向量。
假设理想跟踪位移为zd,跟踪误差e=z-zd,设计前馈控制律为:
(17)
式中:u为反馈控制律。
将式(17)代入式(16)可得

(18)
采用RBF神经网络逼近d(z),其表达式为:
(19)
式中:εf为逼近误差;σf为高斯函数;wf*为理想神经网络的权值。
综合式(18)和式(19)得
(20)
定义
(21)
其中α>0,则
利用HJI不等式将式(22)写成如下形式
(23)
设计如下自适应律:
(24)
式中:η为正实数。
设计反馈控制律为:
(25)
由HJI不等式定理可得,设计后的闭环系统满足J≤γ,是稳定的[16]。
3.2 控制系统设计
为了实现系统良好的动、静态性能,本文提出了一种包括基于RBFNN的气隙磁链自适应辨识器和基于RBFNN和HJI不等式的自适应鲁棒控制器的双RBFNN自适应悬浮子系统独立控制系统,图3为该独立控制系统框图。
与传统气隙磁场定向以及传统悬浮子系统独立控制系统相比,本文对逆系统独立控制系统的基于RBFNN气隙磁链辨识方法和基于HJI不等式原理逆系统鲁棒控制器进行了设计,具有如下特点:首先运用神经网络具有很强的泛化能力和自适应能力,能在定子电信号频率变化和负载变化情况下实现较为精确的气隙磁链观测,使实现高性能独立控制成为可能,最终转矩子系统可以使用通用变频器控制,增强了BIM的实用性。其次设计基于HJI原理和RBFNN的逆系统鲁棒控制器取代传统的PID控制器,减少参数调节,增强系统的鲁棒性能和自适应能力,最终真正实现BIM动态解耦控制。
4 系统仿真与实验
以一台无轴承异步电动机试验样机为研究对象,先通过Matlab建立了仿真模型来验证本文提出的控制策略的有效性。系统参数如表1所示。
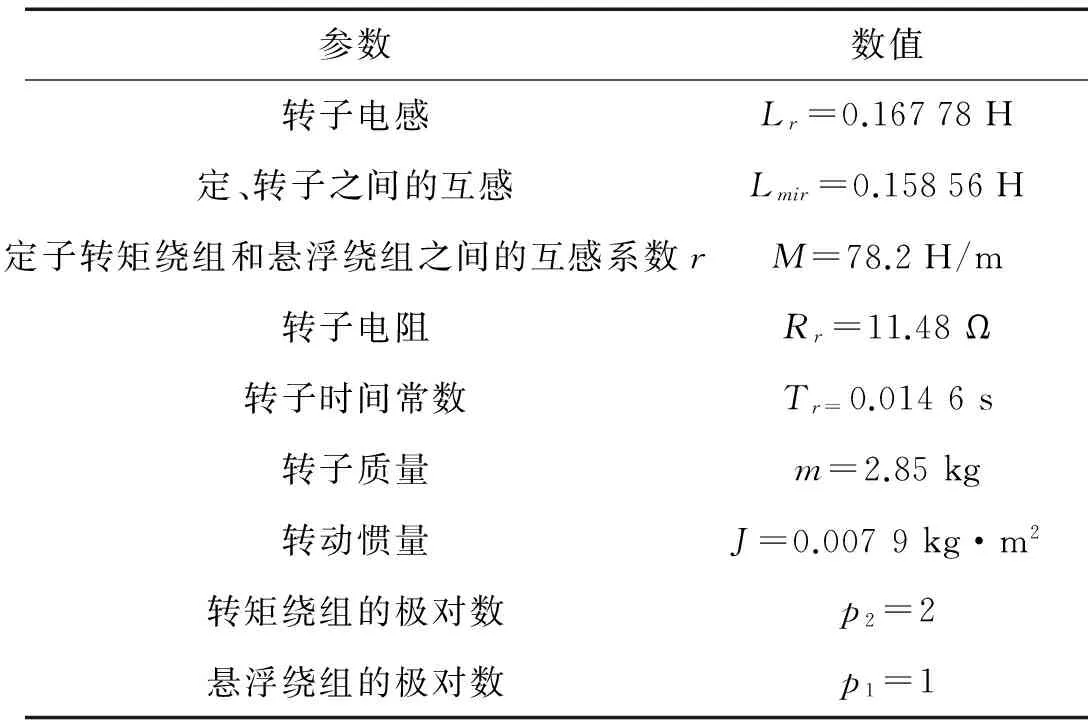
表1 系统参数
首先,对采用带高通滤波器和坐标变换环节的气隙磁链观测器辨识得出的数据进行分析,选取其中150组数据按文章中方法进行离线训练,设定目标最小误差为0.01。由图4可知,训练结束后隐层结点个数为28,辨识误差为0.007 154 3。
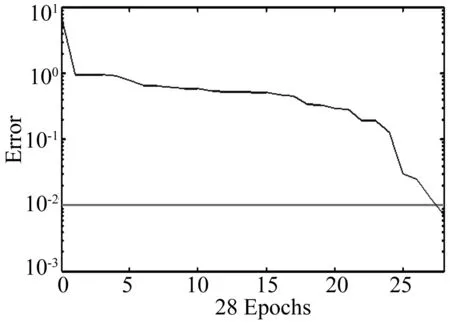
图4 离线训练结果Fig.4 Result of off-line training
为验证该气隙磁链观测器辨识值在BIM调速过程中的是否具有较高辨识精度,设置初始给定转速为1 500 r/min,在0.1 s调速至3 000 r/min,仿真结果如图5所示,其中实际值为无轴承异步电动机精确数学模型气隙磁链输出值,估测值为本文磁链观测器辨识值。低速时气隙磁链辨识误差约为0.06 Wb,在0.02 s之后辨识误差小于0.01 Wb,满足设计精度要求。此外,在辨识过程中避免了传统磁链辨识出现的积分饱和。
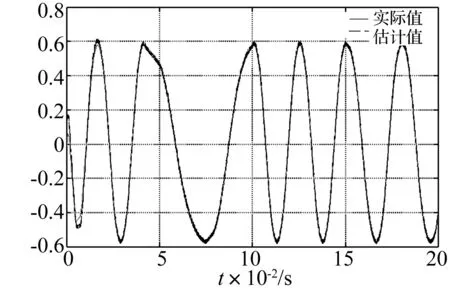
图5 α轴气隙磁链实际和辨识波形Fig.5 True and estimated waveform ofair gap flux in the α axle
将训练完成的RBF神经网络作为气隙磁链辨识器应用到本文控制系统中。鲁棒控制器中RBFNN取4-5-2结构,η=1 500,α=200,γ=20,高斯函数参数ci和bi分别为[-2 -1 0 1 2]和50,并进行仿真实验。
由于径向悬浮力的控制只与转矩绕组气隙磁链的幅值和相位有关,采用独立控制后转矩子系统摆脱悬浮原理束缚,所以转矩绕组就近似于一个独立的异步电机模型,仿真中采用传统直接转矩控制方法进行控制研究,结果如图6。在0.5 s给定转速由3 600 r/min突加至7 200 r/min。图6(a)中,电机启动后,转子转速迅速到达给定转速3 600 r/min,调节时间约为0.01 s,几乎没有超调,且保持稳定;当转速给定突变至7 200 r/min,转子转速迅速响应,调节时间约为0.01 s,同样几乎没有超调,具有良好的动、静态性能。
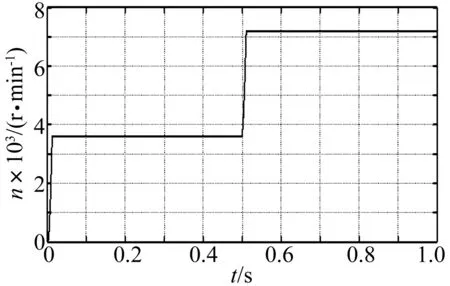
图6 转矩绕组采用直接转矩控制转速波形Fig.6 Waveform of torque winding controlled by DTC
悬浮绕组由本文提出独立解耦控制算法控制。设置转子质心x轴径向位移初始值为-0.08 mm,y轴径向位移初始值为-0.25 mm,初始期望径向位移都为0 mm。由图6(b)、(c)可知,电机启动后,转子质心迅速到达给定中心点位置,并保持稳定,几乎没有位移超调,约为0.02 s转子质心就达到给定位置。由图6、图7(a)和图7(b)可见当转速发生突变时,径向位移并没有发生明显变化;当径向位移发生突变时,转速也没有发生明显变化,仿真表明悬浮绕组RBFNN逆独立控制方法能够实现转矩和悬浮力之间解耦。
为了检验径向悬浮力子系统在x,y轴方向上的径向悬浮力(径向位移)是否实现解耦控制,在0.8 s调整x轴径向位移到0.15 mm,在0.6 s调整y轴径向位移给定到-0.15 mm,结果如图7。比较图7(a)和图7(b)可以发现当x轴径向位移发生突变时,y轴径向位移并没有受到影响;当y轴径向位移发生突变时,x轴径向位移也没有受到影响,因此可以得出使用RBF自适应鲁棒控制器能够实现x轴和y轴径向力解耦,且系统具有良好的动,静态性能。
图8为悬浮子系统采用传统PID控制时转子径向位移波形图,径向位移最大超调约为0.11 mm,最大超调时间约为0.12 s。比较图7和图8可得:在本文提出的方法控制下,悬浮子系统在运行时电主轴抖动更小,悬浮性能优异,快速性和准确性更强,控制性能更好且具有更好的抗干扰能力。
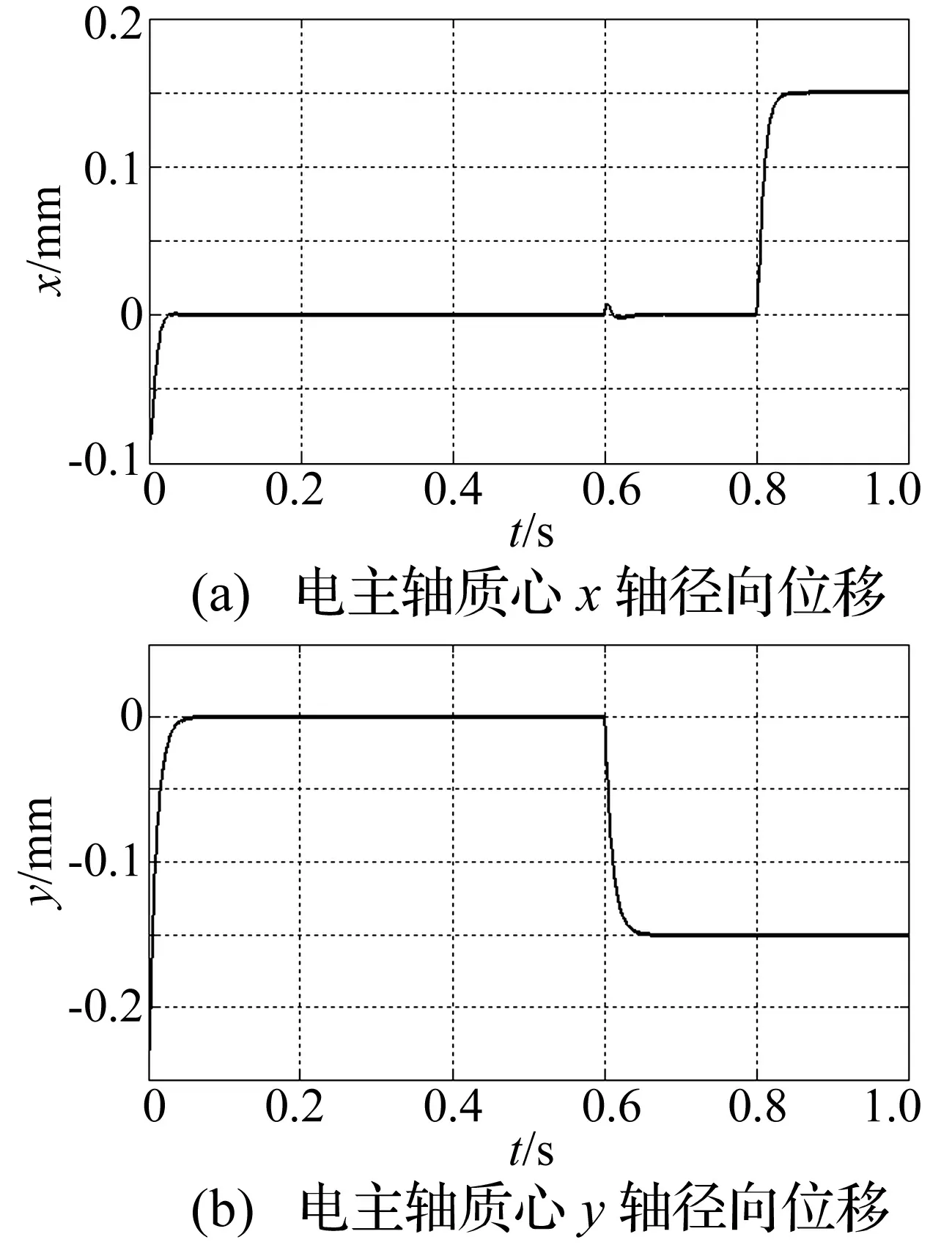
图7 采用本文逆系统独立控制方法仿真结果Fig.7 Simulating results using inverse system independence controlmethod in this paper
采用本文控制策略,利用实验室无轴承异步电动机数字控制平台对样机进行控制。如图9所示实验结果表明电机转子实现了稳定悬浮且电主轴位移抖动小于±50 μm,证明了文中所提方法有效,但是比较仿真波形和实验波形发现仿真波形波动不大而实验较大,分析后原因后可知仿真时电机模型理想化,而实际中电机加工准确度不高引起转子质量分布不平衡,导致实验中出现质心偏移。为了验证本文控制方法的控制性能,在轴上突加扰动,并与传统PID控制方法进行比较,实验波形如图9和图10。比较图9和图10可知采用本文控制方法的鲁棒性能和快速性能明显优于传统PID控制方法。
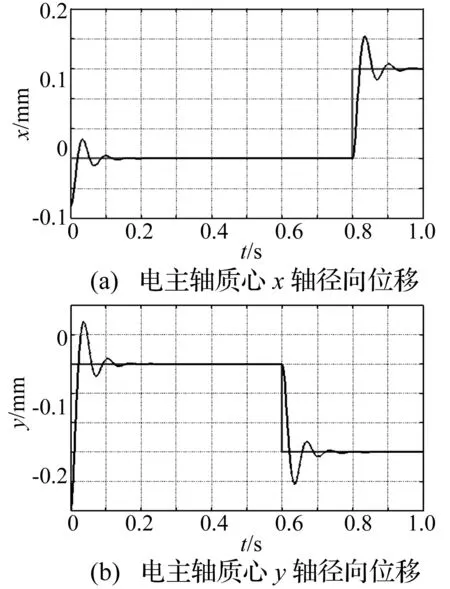
图8 采用传统PID控制方法仿真结果Fig.8 Simulation results using PID control method
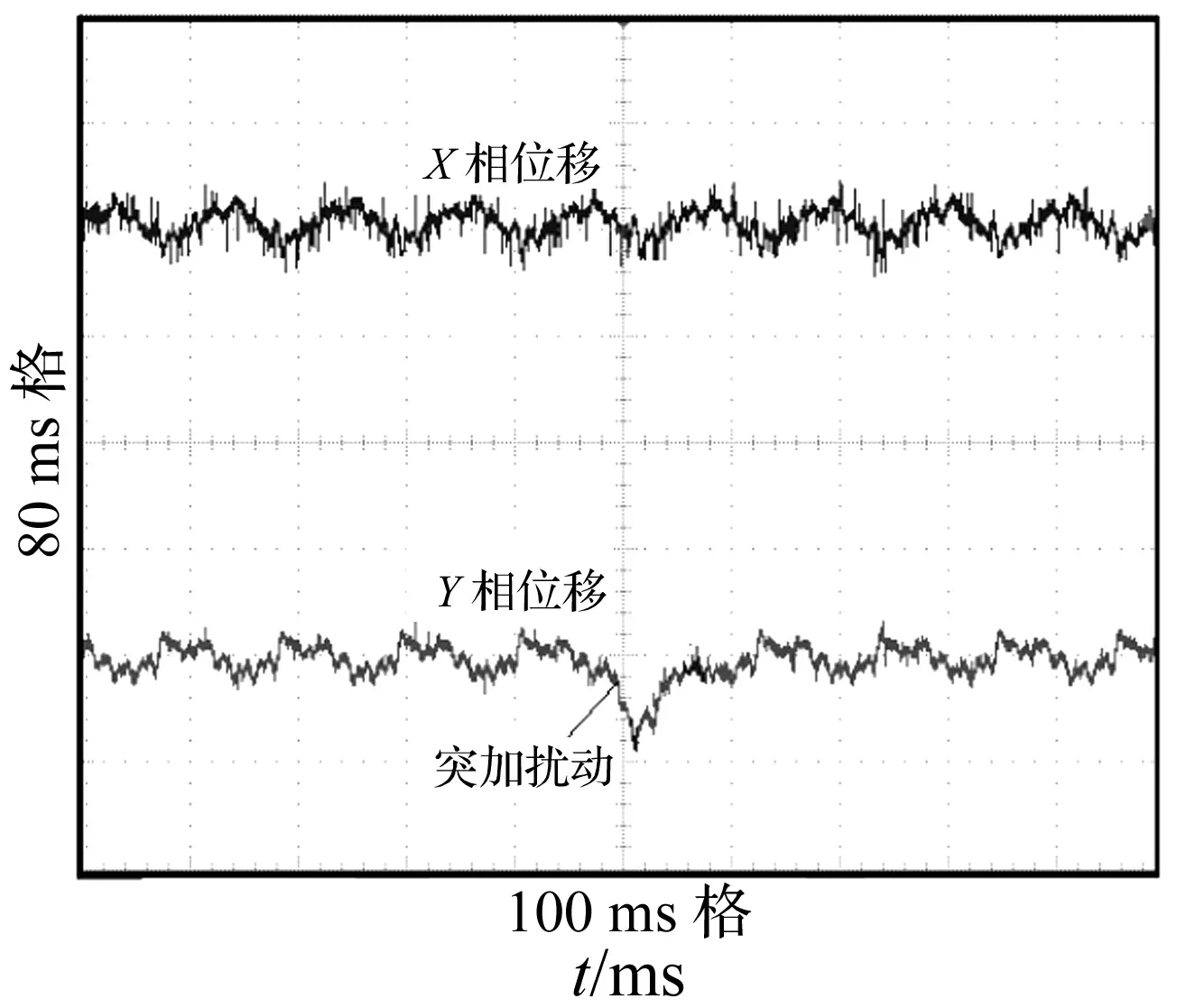
图9 采用本文方法控制电主轴质心位移实验波形Fig.9 Experimental waveform of the electric spindle using method in this paper
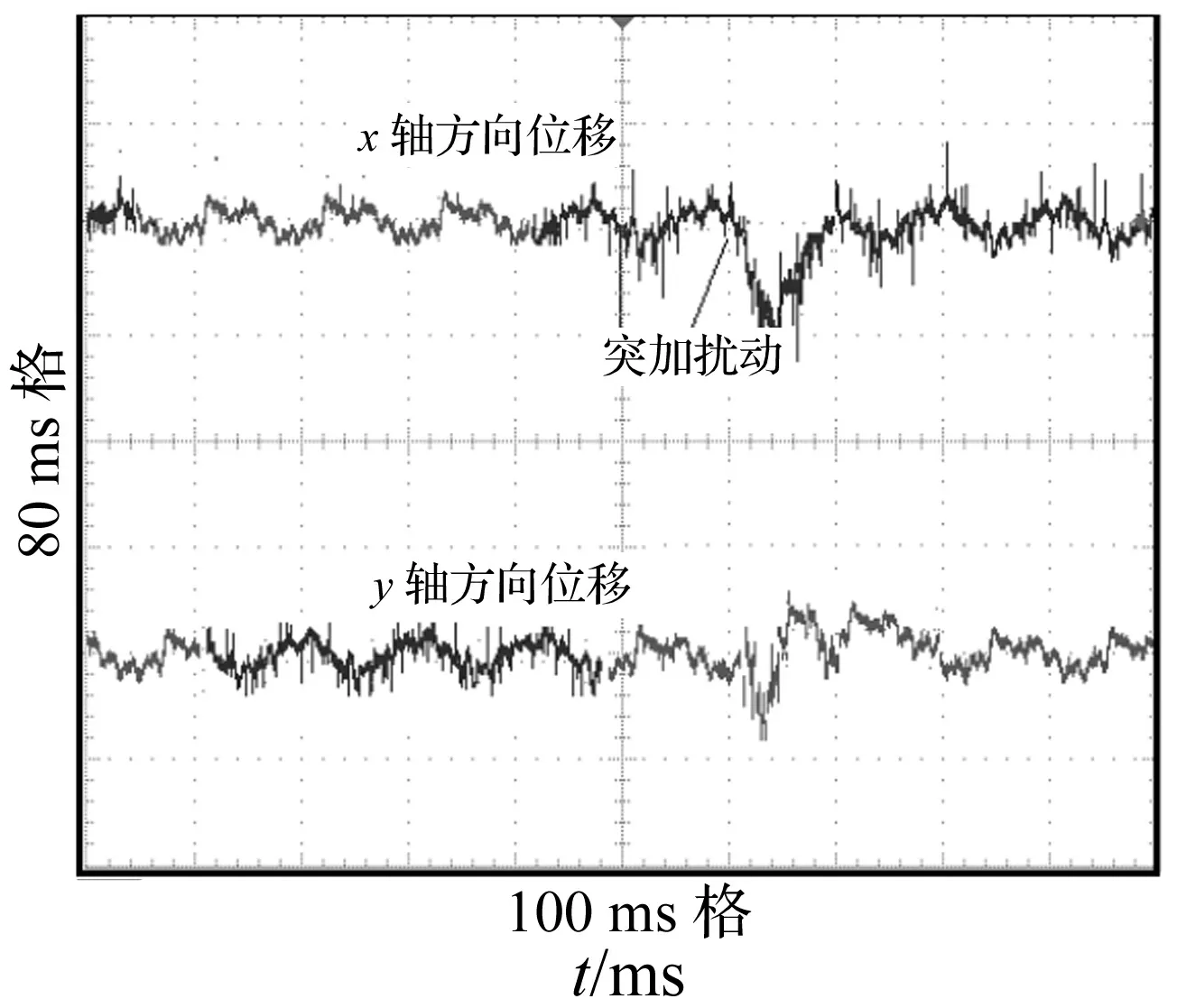
图10 采用传统PID控制电主轴质心位移实验波形Fig.10 Experimental waveform of the electric spindle using PID control method
5 结 论
针对无轴承异步电动机传统悬浮力绕组独立控制系统中磁链辨识精度不高、鲁棒性不好等缺陷,本文提出了悬浮力子系统RBF神经网络自适应控制方法。该控制方法运用RBF神经网络的快速逼近能力构建RBFNN磁链观测器替代传统电压型磁链观测器,从而提高了气隙磁链的观测精度;同时基于HJI原理和RBF神经网络设计了RBFNN自适应鲁棒控制器来替代传统PID控制器,减少参数调节并提高控制系统的抗干扰能力及控制性能。仿真结果表明,该控制方法不仅能够实现BIM电磁转矩和悬浮力解耦控制,且能实现x、y方向径向力之间的悬浮力解耦控制,使得控制系统具有良好的动静态性能。仿真和实验结果表明,采用文中所提方法能够实现BIM解耦控制且电主轴抖动幅度小,但是由于加工精度原因电主轴会产生抖动,对抖动进行补偿的控制方法是一个潜在的研究方向。
[1] CHIBE A, AKAMATSU D, AZIZUR RAHMAN M. An improved rotor resistance identification method for magnetic field regulation in bearingless induction motor drives[J]. IEEE Transactions on Industrial Electronics, 2008, 55(2):852-860.
[2] 邓智泉, 王晓琳, 张宏荃, 等. 无轴承异步电机的转子磁场定向控制[J]. 中国电机工程学报, 2003, 23(3):89-92. DENG Zhiquan, WANG Xiaolin, ZHANG Hongquan, et al. The nonlinear control of bearingless induction motors based on the motor rotor flux orientation[J]. Proceedings of the CSEE, 2003, 23(3):89-92.
[3] SUN Xiaodong, CHEN Long, YANG Zebin, et al. Speed-sensorless vector control of a bearingless induction motor with artificial neural network inverse speed observer[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(4):1357-1366.
[4] CHIBA A, SANTISTEBAN J A. A PWM harmonics elimination method in simultaneous estimation of magnetic field and displacements in bearingless induction motors[J].IEEE Transactions on Industry Applications, 2012, 48(1): 124-131.
[5] 孙晓东, 朱熀秋. 基于神经网络逆系统理论无轴承异步电动机解耦控制[J]. 电工技术学报, 2010, 25(1): 43-49. SUN Xiaodong, ZHU Huangqiu. Decoupling control of bearingless induction motors based on neural network inverse system method[J]. Transaction of CHINA Electrical Society, 2010, 25 (1): 43-49.
[6] 孙玉坤, 周云红,嵇小辅. 磁悬浮开关磁阻电机的神经网络逆解耦控制[J]. 中国电机工程学报, 2011, 31(30): 117-123. SUN Yukun, ZHOU Yunhong, JI Xiaofu. Decoupling control of bearingless switched reluctance motor with neural network inverse system method[J]. Proceedings of the CSEE, 2011, 31(30): 117-123.
[7] 刘国海, 孙玉坤, 张浩, 等. 基于神经网络逆系统的磁悬浮开关磁阻电动机的解耦控制[J]. 电工技术学报, 2005, 20(9):39-43. LIU Guohai, SUN Yukun, ZHANG Hao, et al. Decoupling control of bearingless switched reluctance motors based on neural network inverse system[J]. Transactions of China Electrotechnical Society, 2005, 20(9): 39-43.
[8] ZHU Huangqiu, ZHOU Yang, LI Tianbo, et al. Decoupling control of 5 degrees of freedom bearingless induction motors usingα-th order inverse system method[J]. Acta Automatica Sinica, 2007, 33(3): 273-278.
[9] 程帅, 姜海博, 黄进, 等. 基于滑模观测器的单绕组多相无轴承电机无位置传感器控制[J]. 电工技术学报, 2012, 27(7): 71-77. CHENG Shuai, JIANG Haibo, HUANG Jin, et al. Position sensorless control based on sliding mode observer for multiphase bearingless motor with single set of windings[J]. Transaction of CHINA Electrical Society, 2012, 27(7): 71-77.
[10] 王晓琳, 任新宇, 邓智泉, 等. 短路容错控制在多相无轴承永磁同步电机中的可行性分析[J]. 电工技术学报, 2012, 27(3): 105-118. WANG Xiaolin, REN Xinyu, DENG Zhiquan, et al. Feasibility of fault-tolerant control of multi-phase permanent magnetic bearingless motors with short-circuited phases[J]. Transaction of CHINA Electrical Society, 2012, 27(3): 105-118.
[11] 邓智泉, 王晓琳, 李冰, 等. 无轴承异步电机悬浮子系统独立控制的研究[J]. 中国电机工程学报, 2003, 23(9): 107-111. DENG Zhiquan, WANG Xiaolin, LI Bing, et al. Study on independent control of the levitation subsystem of bearingless induction motors [J]. Proceedings of the CSEE, 2003, 23(9): 107-111.
[12] 孙晓东, 陈龙, 杨泽斌, 等. 考虑偏心及绕组耦合的无轴承永磁同步电机建模[J]. 电工技术学报, 2013, 28(3): 64-70. SUN Xiaodong, CHEN Long, YANG Zebin, et al. Modeling of a bearingless permanent magnet synchronous motor considering rotor eccentricity and coupling relationship of windings[J]. Transaction of CHINA Electrical Society, 2013, 28(3): 64-70.
[13] 王宇, 邓智泉, 王晓琳. 一种新颖的电机磁链辨识算法[J]. 中国电机工程学报, 2007, 27(6): 39-44. WANG Yu, DENG Zhiquan, WANG Xiaolin. A novel algorithm of motor flux estimation [J]. Proceedings of the CSEE, 2007, 27(6): 39-44.
[14] 夏长亮, 祁温雅, 杨荣,等. 基于RBF神经网络的超声波电机参数辨识与模型参考自适应控制[J]. 中国电机工程学报,2004,24 (7): 117-121. XIA Changliang, QI Wenya, YANG Rong, et al. Identification and model reference adaptive control for ultrasonic motor based on RBF neural network [J]. Proceedings of the CSEE, 2004,24(7): 117-121.
[15] DONCKER D, NOVOTNY R W. The universal field oriented (UFO) controller[J]. IEEE Trans. Industry Applications, 1994, 30(1): 92-100.
[16] 刘金琨. RBF神经网络自适应控制MATLAB仿真[M]. 北京:清华大学出版社, 2014.
Independent RBFNN inverse decoupling control for levitation subsystem of bearingless induction motor of NC machines
SUN Yuxin1, QIAN Zhongbo1,2
(1. College of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China;2. Technology research and Development Department,?Huayu Automotive Electric System CO., LTD., Pudong New Area, 200120, China)
To realize the dynamic decoupling control of high speed bearingless induction motor (BIM) of NC machines, a self-adaptive independent control method based on radial basis function neural network (RBFNN) was proposed here. Firstly, with this method, an air-gap flux observer was built to obtain a more accurate air-gap flux identifier due to stronger self-learning and self-adaptive ability of RBFNN. Furthermore, a RBFNN self-adaptive robust controller based on Hamilton-Jacobi-Isaacs (HJI) was designed to realize the decoupling control of the levitation subsystem of BIM stably and reliably. Finally, the self-adaptive independent control system with double RBFNN was composed of the proposed air-gap flux observer and the self-adaptive robust controller. The simulation results showed that the proposed system has good dynamic and static performances; in addition, this proposed method not only realizes the decoupling control of torque and radial suspension forces, but also realizes that of radial suspension forces in both two degrees of freedom of the system.
BIM; decoupling control system; RBFNN; flux identification; robust controller; NC machine
国家自然科学基金(61174005)
2015-10-15 修改稿收到日期:2016-03-11
孙宇新 女,硕士,副教授,1968年生
钱忠波 男,硕士生,1991年生
TM343
A
10.13465/j.cnki.jvs.2016.21.031
