城市环境下BDS+GPS RTK+INS紧组合算法性能分析
2016-12-15章红平牛小骥
李 团,章红平,牛小骥,张 全
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 武汉大学GNSS中心,湖北 武汉 430079)
城市环境下BDS+GPSRTK+INS紧组合算法性能分析
李 团1,2,章红平2,牛小骥2,张 全2
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 武汉大学GNSS中心,湖北 武汉 430079)
城市环境下运动载体接收的GNSS信号会被频繁地干扰和遮挡,GNSS RTK独立工作模式难以连续且可靠地固定模糊度以满足厘米级高精度定位需求。为此,本文设计了一套基于集中式卡尔曼滤波的BDS+GPS RTK紧组合算法,给出了其动力学模型、观测模型和算法架构流程。通过城市环境下的实际车载测试,对比分析了BDS、GPS、BDS+GPS 3种模式下RTK及RTK+INS紧组合的定位性能。试验结果表明,BDS+GPS双系统大大增加了可见卫星数,提高了城市环境下GNSS动态精密定位的可用性和精度;相对于GNSS RTK,紧组合极大地提高了精密定位的可靠性和可用性。
城市环境;BDS+GPS;紧组合;RTK;INS
GNSS/INS紧组合直接使用原始的伪距、多普勒、载波相位等原始观测值作为滤波器的输入,且卫星数小于4颗时仍能正常工作,相较于松组合具备更高的精度和鲁棒性[1]。目前,基于伪距、多普勒的紧组合研究得较多,但是其精度依赖于伪距的精度,无法满足高精度定位需求;基于载波相位的紧组合则可以提供厘米级精度的定位性能[2-3]。城市环境下GNSS信号容易受到干扰和遮挡,单一的GPS系统可见卫星数、定位精度和可用性都会下降。北斗导航卫星系统(BDS)可以大大增加观测卫星数,提高系统的可用性和精度[4-5],且多系统的GNSS/INS紧组合可以大大提高导航系统的可靠性和对故障区分能力[6]。目前,多数研究采取模拟信号中断、观测粗差等手段来研究紧组合性能,使用真实较恶劣城市环境下的数据分析紧组合性能的研究非常有限。
基于此,本文研究了RTK+INS紧组合算法,首先给出了紧组合滤波模型,包括紧组合Kalman滤波的状态方程和量测方程;并设计了数据处理程序,介绍了算法的架构和流程;最后通过实测车载数据,对RTK及其紧组合的定位性能进行了对比分析。
一、BDS+GPS RTK+INS紧组合滤波算法
RTK+INS紧组合算法使用扩展卡尔曼滤波(extended Kalman filter, EKF)将GNSS观测信息和INS测量信息融合后对导航状态误差、IMU误差和双差模糊度等参数进行估计。
1. 状态方程
本文采用基于计算坐标系(c系)扰动分析后得到的Psi角误差模型[7],即
(1)
陀螺和加速度计的零偏误差和比例因子误差通常建模为一阶高斯-马尔科夫过程[8]
(2)
式中,δb、δs分别表示零偏误差和比例因子误差;τb、τs为一阶高斯-马尔科夫过程的相关时间;w为驱动白噪声。
将式(1)和式(2)写成矩阵形式如下
(3)
式中,xINS=[δrcδvcψδbgδbaδsgδsa]T,是与惯导相关的误差状态向量;F为系统矩阵,其表达式可参考文献[9];G为噪声驱动矩阵;w为驱动白噪声。

2. 量测方程
BDS+GPS RTK紧组合中将INS推算的双差距离与双差伪距、双差载波相位观测值之差作为Kalman滤波的观测量,即有
(4)

二、算法架构和流程
图1给出了紧组合算法架构,其主要包括如下模块:惯导机械编排、IMU误差补偿、反馈修正、形成双差观测、紧组合Kalman滤波、模糊度在航解算等处理模块。相较于独立解算模糊度的分散式滤波方法,附加模糊度参数的集中式滤波能提供更优的性能[10-11],因此本文采用集中式滤波方法估计导航状态误差、IMU误差和浮点模糊度。利用估计出来的导航位置误差对惯导机械编排的结果进行反馈修正,同时使用在线估计的零偏和比例因子误差对IMU原始观测值进行误差补偿。模糊度在航解算模块使用LAMBDA方法将紧组合Kalman滤波估计的浮点模糊度固定为整周模糊度。
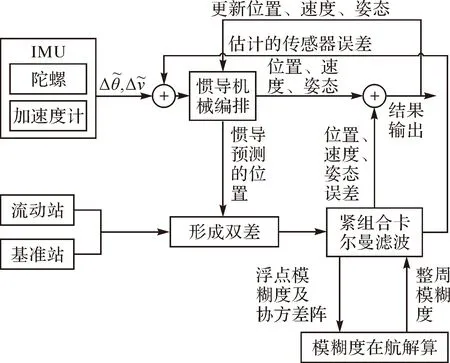
图1 紧组合算法架构
三、算例分析
为了比较和评估城市环境下GNSS RTK及其紧组合算法的性能,2015年8月12日在武汉市区进行了车载试验,其测试轨迹及典型的场景如图2所示。测试中搭载了武汉迈普时空导航科技有限公司的战术级GNSS+INS组合导航系统POS310(陀螺零偏0.5°/h,加速度计零偏50 mGal),该系统是一款中等精度的光纤陀螺定位定姿系统,配置了高精度Trimble BD982 GNSS OEM板卡,基准站采用Trimble Net R9接收机,架设在武汉大学教学实验大楼楼顶,接收机采样率为1 Hz。测试中数据采集时间约为50 min,基线距离为10~20 km。

图2 测试轨迹及典型场景
由于GNSS双系统紧组合可见卫星数绝大多数大于4,模糊度固定成功率为99.9%,且载波双差残差优于3 cm,本文以双系统紧组合反向平滑的结果作为“参考真值”,与GPS、BDS、GPS+BDS RTK及其相应的紧组合正向滤波定位结果进行了对比分析。
图3和图4分别给出了测试过程中的共视卫星数及PDOP值,卫星截止高度角都设置为12°。可以看出,受城市中高楼、高架桥等复杂环境的影响,卫星数变化剧烈,GPS或BDS单系统卫星数不足4颗的情况较多,多数情况下,BDS的卫星数少于GPS,且其PDOP值明显大于GPS系统;而双系统时,可见卫星多,极大地改善了动态情况下的空间几何结构。

图3 共视卫星数
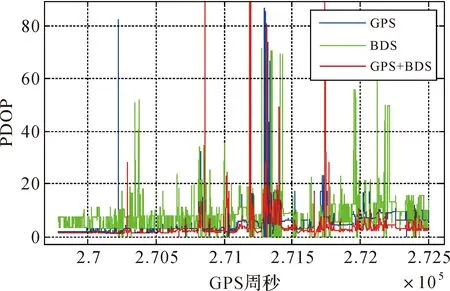
图4 PDOP值
图5—图7分别为GPS、BDS、GPS+BDS RTK的位置误差序列,表明在信号频繁失锁和多路径影响的城市环境下,RTK解算结果很不可靠,GPS+BDS双模较大提升了性能,但仍然有误差较大的浮点解和粗差点。
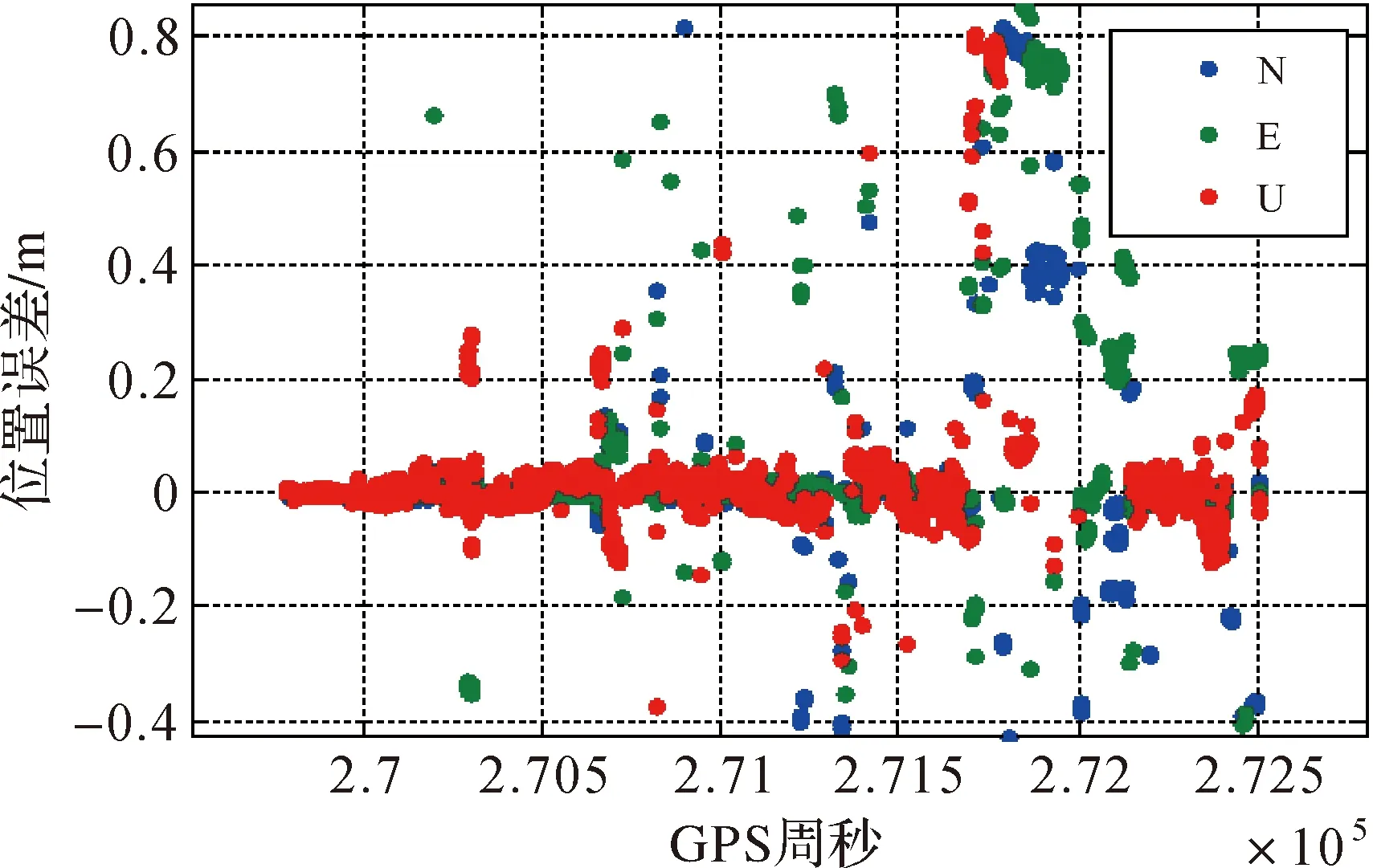
图5 GPS RTK位置误差
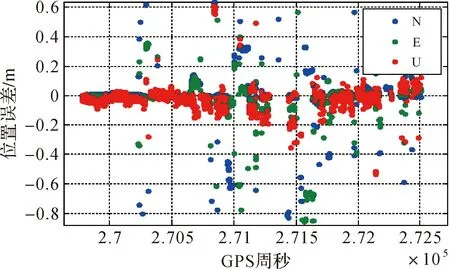
图6 BDS RTK位置误差
图8—图10分别为GPS、BDS、GPS+BDS RTK+INS紧组合的位置误差序列,图8和图9中少数几个历元位置误差较大是由于GNSS信号中断16 s后浮点解收敛阶段。对比可以看出,紧组合算法能大大提高系统的可靠性和精度,其结果更加平滑,极少有粗差点出现。同时,北斗系统的加入则进一步提高了系统的可用性和稳定性。对比图5—图10可知,系统在较开阔的环境下位置差异均为厘米级。
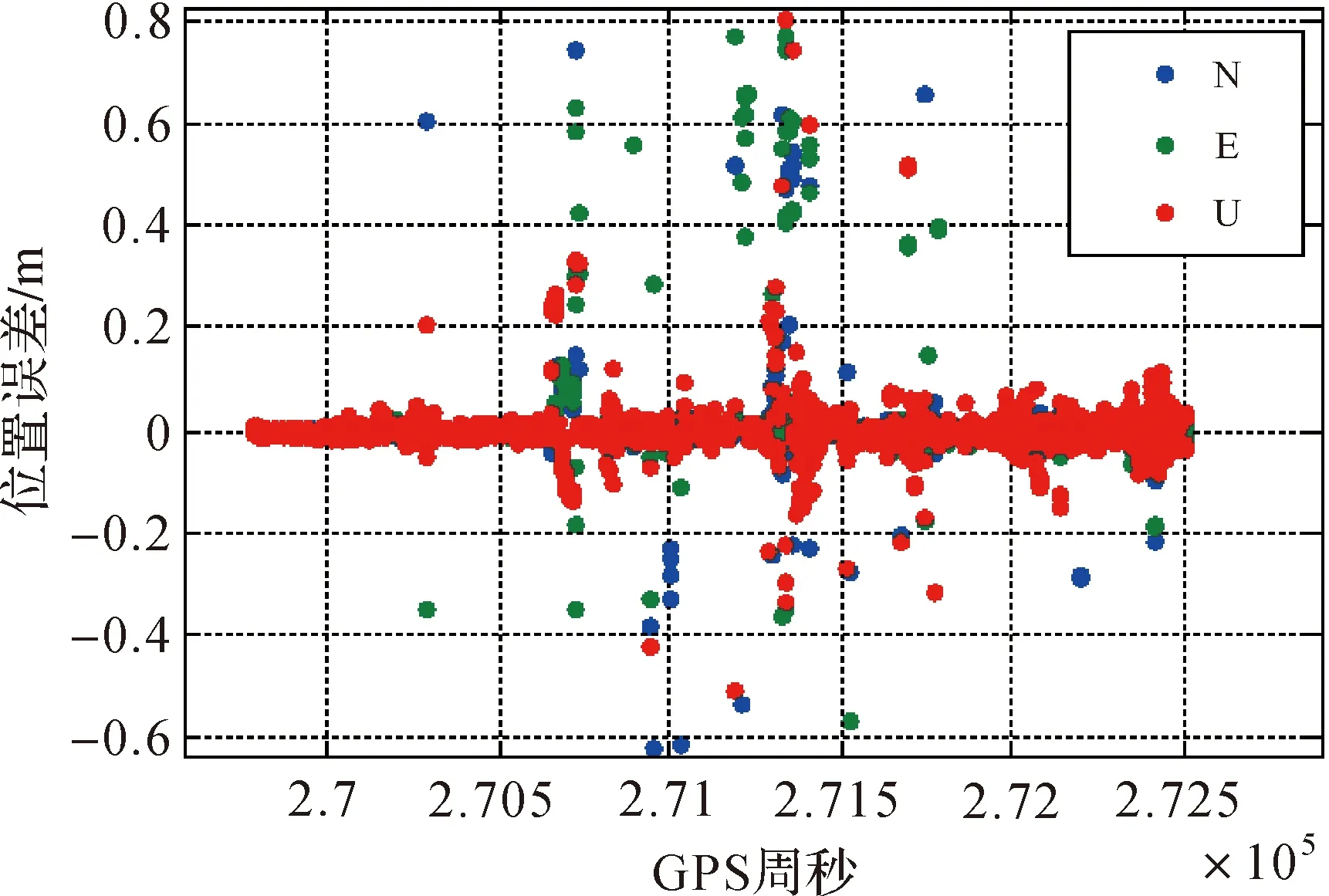
图7 GPS+BDS RTK位置误差
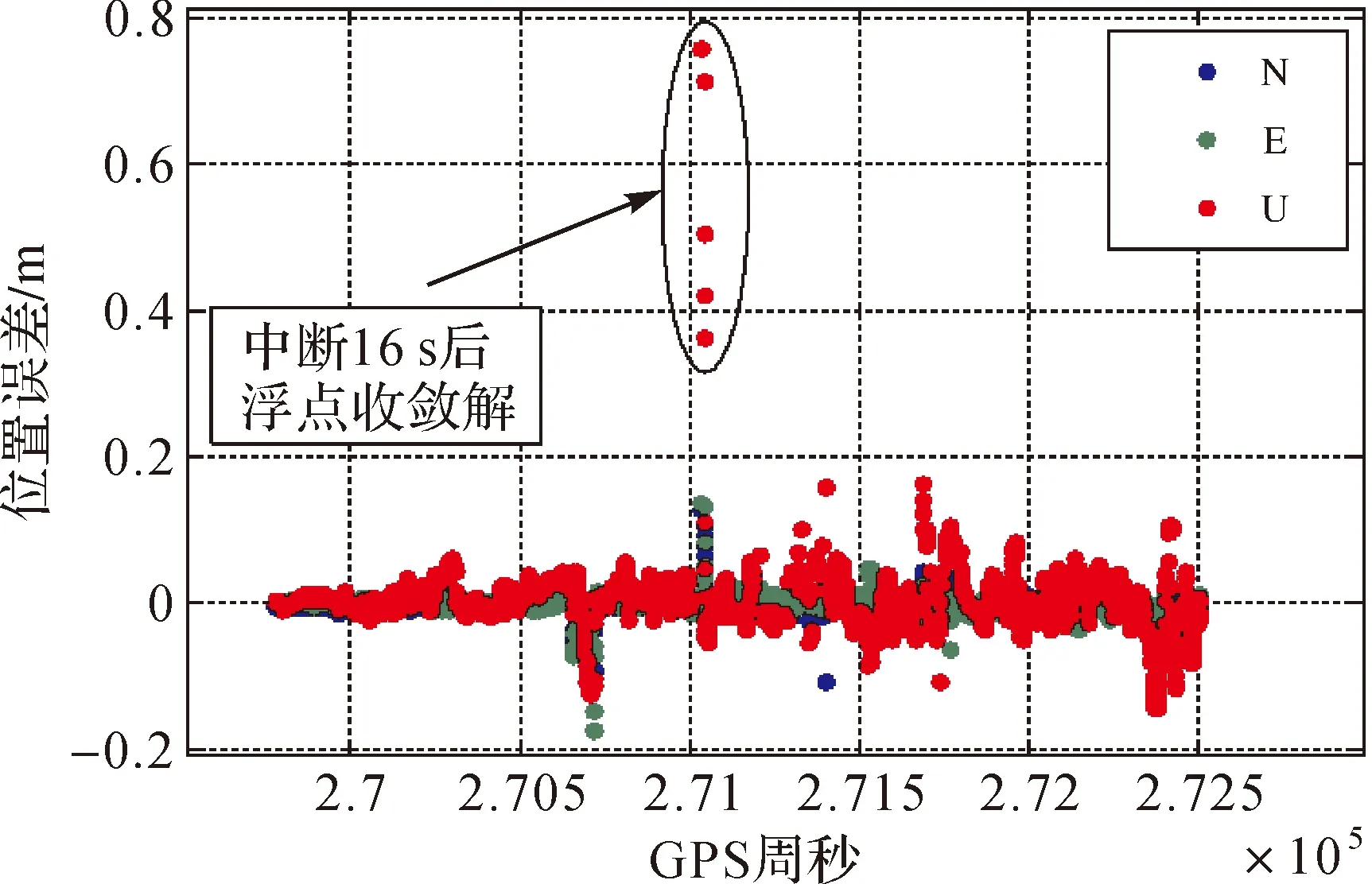
图8 GPS RTK+INS位置误差
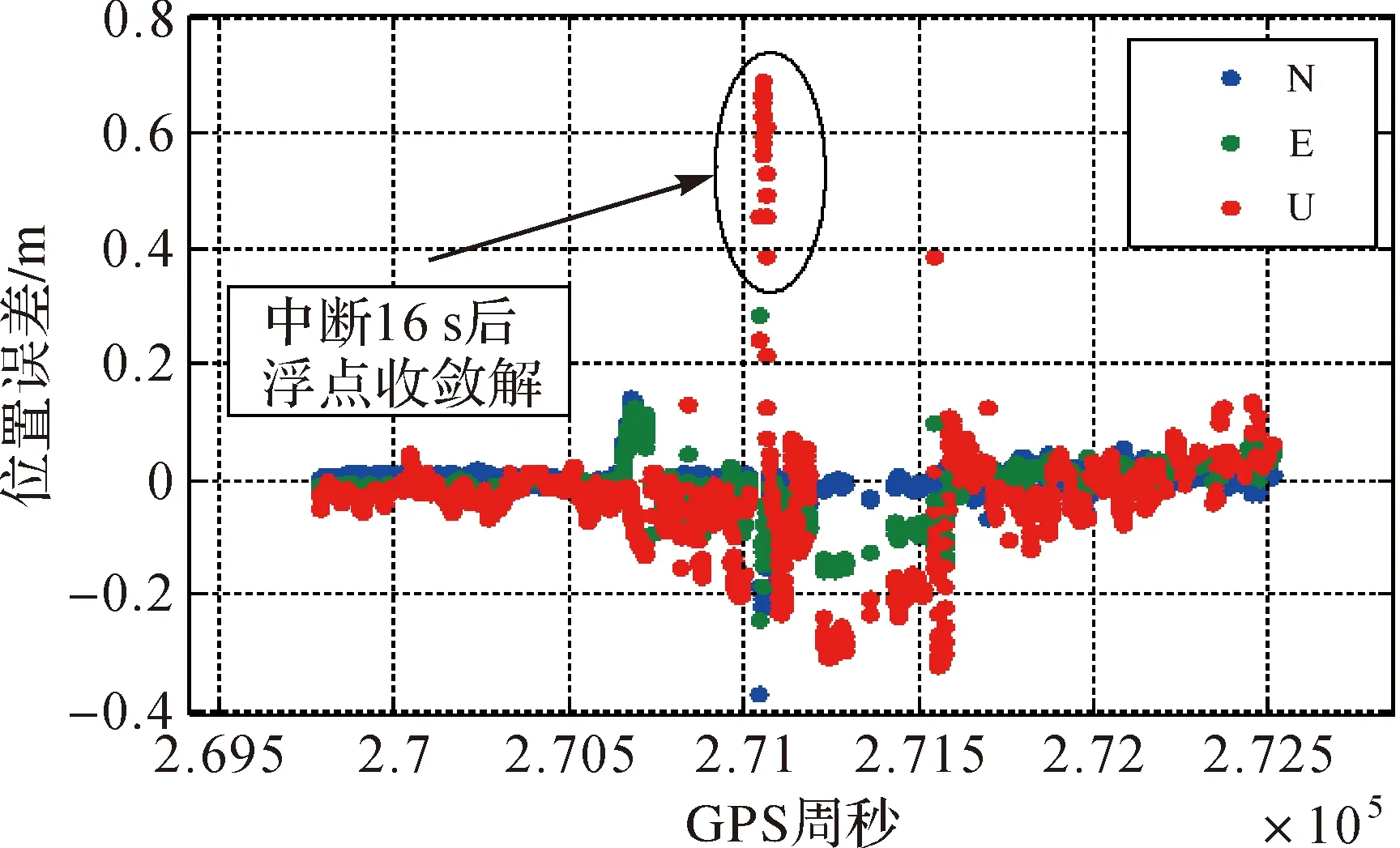
图9 BDS RTK+INS位置误差

图10 GPS+BDS RTK/INS位置误差

表1 不同解算模式下有效解、固定解、位置厘米级差异的历元占比 (%)
表1给出了不同解算模式下有效解占理论历元的比例、有效解中固定解的比例及固定解中位置差异为厘米级的历元所占的比例。对比分析可知,单系统的RTK可用性和固定解比例均较低,RTK+INS紧组合能显著提高相应比例,加入北斗后RTK性能显著提升,RTK+INS紧组合提升有限,这是由于单系统的紧组合性能已经很优越。厘米级差异占比小于固定解比例说明少数固定解中有模糊度错误固定的历元,大于固定解比例则说明紧组合依赖惯导短期高精度特点,提高了浮点解的精度。另外,整组数据中,BDS定位性能明显比GPS差,这与BDS卫星数较少有关。
四、结束语
城市环境下,由于GNSS信号受到遮挡和干扰,RTK的可用性和可靠性均得不到保障,RTK+INS紧组合则可以大大提高系统的可靠性,从而提供更连续的高精度导航定位。北斗系统大大增加了可见卫星数,进一步提高了系统的可用性和可靠性。但是,对于较长时间的GNSS信号失锁,紧组合也不能提供厘米级的高精度定位结果。为此,需进一步研究其他传感器(如视觉、里程计等)辅助信息辅助RTK+INS,以进一步提升城市环境下的厘米级精密定位性能。
[1] GREWAL M S, WEILL L R, ANDREWS A P. Global Positioning Systems, Inertial Navigation, and Integration[M]. [S.l.]:John Wiley & Sons, 2007.
[2] 甘雨,隋立芬,张清华,等. 利用时间差分载波相位的GNSS/INS紧组合导航[J]. 测绘通报,2015 (6): 5-8.
[3] 郝万亮,孙付平. 基于双卡尔曼滤波器的高度POS算法研究[J]. 测绘通报,2015 (6): 12-15.
[4] 唐卫明, 徐坤, 金蕾, 等. 北斗/GPS 组合伪距单点定位性能测试和分析[J]. 武汉大学学报 (信息科学版), 2015, 40(4):529-533.
[5] HAN H, WANG J, WANG J, et al. Performance Analysis on Carrier Phase-Based Tightly-coupled GPS/BDS/INS Integration in GNSS Degraded and Denied Environments[J]. Sensors, 2015, 15(4): 8685-8711.
[6] 吴有龙,王晓鸣,杨玲,等. GNSS/INS 紧组合导航系统自主完好性监测分析[J]. 测绘学报, 2014, 43(8): 786-795.
[7] BENSON Jr D O. A Comparison of Two Approaches to Pure-inertial and Doppler-inertial Error Analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 1975 (4): 447-455.
[8] PARK M. Error Analysis and Stochastic Modeling of MEMS Based Inertial Sensors for Land Vehicle Navigation Applications[D].Calgary: University of Calgary, 2004.
[9] BRITTING K R. Inertial Navigation Systems Analysis[M]. New York:John Wiley & Sons,1971.
[10] WU H. On-the-fly GPS Ambiguity Resolution with Inertial Aiding[D]. Calgary:University of Calgary, 2003.
[11] PETOVELLO M G, CANNON M E, LACHAPELLE G. Benefits of Using a Tactical Grade IMU for High Accuracy Positioning[J]. Navigation, 2004, 51(1): 1-12.
PerformanceAnalysisofBDS+GPSRTK+INSTightly-coupledAlgorithminUrbanEnvironments
LI Tuan,ZHANG Hongping,NIU Xiaoji,ZHANG Quan
李团,章红平,牛小骥,等. 城市环境下BDS+GPS RTK+INS紧组合算法性能分析[J].测绘通报,2016(9):9-12.
10.13474/j.cnki.11-2246.2016.0281.
P228
B
0494-0911(2016)09-0009-04
2015-11-30
国家863项目(2015AA124002);国家自然科学基金(41404029)
李 团(1989—),男,硕士生,研究方向为GNSS/INS组合。E-mail: tuanli@whu.edu.cn