离子注入机剂量控制器设计
2016-12-14钟新华彭立波易文杰中国电子科技集团公司第四十八研究所湖南长沙410111
钟新华,彭立波,易文杰(中国电子科技集团公司第四十八研究所,湖南 长沙 410111)
离子注入机剂量控制器设计
钟新华,彭立波,易文杰(中国电子科技集团公司第四十八研究所,湖南 长沙 410111)
剂量控制器是离子注入机的核心部件,主要功能有精确测量离子注入机束流与注入剂量,控制离子束在电场中水平运动,并使离子均匀地分布在水平方向和同步垂直扫描运动完成离子注入的剂量控制。基于这些功能要求,本文提出了一种高精密、多功能和程控式的离子注入机剂量控制器。首先介绍了离子注入机剂量控制器工作原理和功能,然后,详细地阐述剂量控制器的系统构成和各功能模块设计及功能实现。此控制器按功能主要分为多通道、多级量程的高精度束流与剂量测量模块、扫描波形控制模块、垂直扫描同步信号检测与控制模块等。最后,通过实验验证了此离子注入机剂量控制器的性能达到设计要求。
离子注入;剂量控制;扫描波形;位置同步
1 引言
早在20世纪60年代,离子注入技术就应用在半导体器件的生产上。离子注入技术就是将某种元素的原子进行电离,并使其离子在电场中加速,获得较高的速度后植入固体材料的表面,以改变这种材料表面的物理或者化学性能的一种技术。
从1858年世界上第一块集成电路诞生至今的50多年中,世界集成电路技术与产业的飞速发展,经历小规模(数百个元件)、中规模、大规模、超大规模,到今天已进入特大规模(千万以上个元件)的时代。随着集成度的提高和电路规模的增大,电路中单元器件尺寸不断缩小,图形、特征、尺寸成为每一代电路技术的特有表征。20世纪末,集成电路制造技术主流为0.13微米的8英寸硅片;但是经过几年的时间,100纳米、65纳米、32纳米、28纳米的工艺也陆续进入生产;同时受到经济利益的驱动,集成电路制造厂商追求更低的生产成本和更高的生产效率。硅片的尺寸也由200mm增大到300mm,从而可以在单块硅片上生产更多的器件。
随着关键尺寸的减小和硅片尺寸的增大,对晶片掺杂剂量的准确性和均匀性提出了更高的要求。离子注入设备的束流和剂量的测量与控制器是保障注入剂量的准确性和注入剂量的均匀性关键部件。
离子注入机是用于晶片的掺杂工艺,将一定能量的离子植入晶片表面。剂量控制器是离子注入机的关键部件之一,其主要功能是精确实时地采集离子量,并控制离子在电场中移动,将离子按设定剂量、均匀地、精确地植入到晶片表面。根据离子注入机的束斑形状和注入扫描方式的不同,剂量测量与控制方式也不一样,离子注入机有斑状束和带状束,目前,大部分机型都是斑状束,只有低能大束流离子注入机采用的带状束。斑状束须通过二维扫描运动才能将离子植入到整个晶片表面,带状束只需通过一维机械扫描运动就能完成注入功能。而斑状束的二维扫描运动又可分为二维电扫描方式、二维机械扫描方式和电扫描与机械扫描相结合方式。其中,电扫描方式工作原理是在晶片注入时晶片保持固定,改变X、Y轴的扫描电场,控制离子束在扫描电场中作二维运动,将离子束均匀地注入到晶片表面。这种扫描方式的优点是离子注入机靶室机械结构简单,缺点是光路相对复杂,不能满足束平行注入,注入均匀性差等,这种方式只适合小尺寸晶片和对离子注入的均匀性和注入角度要求不高的半导体生产工艺。机械扫描方式是注入时离子束保持固定,控制晶片作二维机械运动达到将离子束均匀地注入到晶片表面。此扫描方式的优点是适合大尺寸晶片或多片晶片同时注入,缺点是运动机构和运动控制复杂以及注入均匀性差等。电扫描与机械扫描相结合方式的特点是离子注入时水平方向采用电扫描,垂直方向采用机械运动扫描,这种扫描方式既避开了前两种方式的缺点,又继承了它们的优点,是一种较为理想的离子注入机扫描方法。目前市场流行的离子注入机机型均采用这种扫描注入方式,如:Varian公司E500、VIIsta900xp和VIIsta810等。本文提出了一种适合于电扫描与机械扫描相结合方式的离子注入机剂量控制器。
2 剂量控制器工作原理
剂量控制器是离子注入机的关键部件之一,其主要功能是精确实量地采集离子量,并控制离子在电场中移动,将离子按设定剂量,均匀地、精确地植入到晶片上。适合于电扫描与机械扫描相结合方式的离子注入机剂量控制器主要由以下部分组成:扫描波形数据存储与扫描波形输出、束流与剂量精密采集、垂直方向扫描位置同步检测与剂量实时控制等。
水平扫描波形发生器工作原理是根据束流在水平方向的分布(如图1所示),通过校准算法修正各点的扫描电压斜率值,使得束流在水平方向分布均匀,并把这些扫描电压斜率值存储到扫描发生器的RAM中,在执行扫描的过程中,扫描发生器从RAM中实时地读出这些数值来产生电压波形(如图2所示)。这样实现了水平方向扫描速度随着水平方向各位置点对应的束流大小成比例调节,从而保证了每次扫描注入离子在水平向分布的均匀性。

图1 水平方向束流分布

图2 水平扫描波形
晶片注入是通过束在水平方向的扫描运动和晶片垂直方向的扫描运动共同完成的,水平和垂直扫描运动不是独立工作的,而是需要同步进行。两者之间的同步方式如下:垂直机械扫描每当运动一个等距离ΔS,向离子注入机剂量控制器发出一个触发脉冲,即位置同步信号。离子注入机剂量控制器检测到此触发信号,上升沿有效,输出一个“W”型扫描波形。并且,每个“W”型扫描波形控制一个剂量积分信号的产生,积分信号宽度(低电平有效)可在扫描波形数据中进行设定。三个信号时序关系如图3所示。

图3 剂量控制时序图
垂直方向机械扫描运动每移动一个ΔS,离子束斑在水平方向完成4次往复扫描,并完成一次剂量Q采集。即单次注入离子密度为D=Q÷(ΔS×W),其中W为法拉第杯开口宽度,注入扫描原理如图4所示[1、2]。
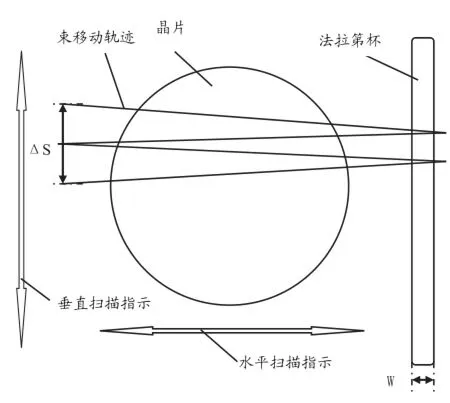
图4 扫描示意图
3 剂量控制器硬件设计
离子注入机剂量控制器是一个专用的计算机控制系统,由CPU单元和一些特殊功能电路组成。主要包括CPU单元、通信接口、波形发生电路、信号调理与发大电路、峰值捕捉电路、剂量积分电路、通道选择电路、档位选择电路和模数转换电路等。其硬件结构如图5所示。
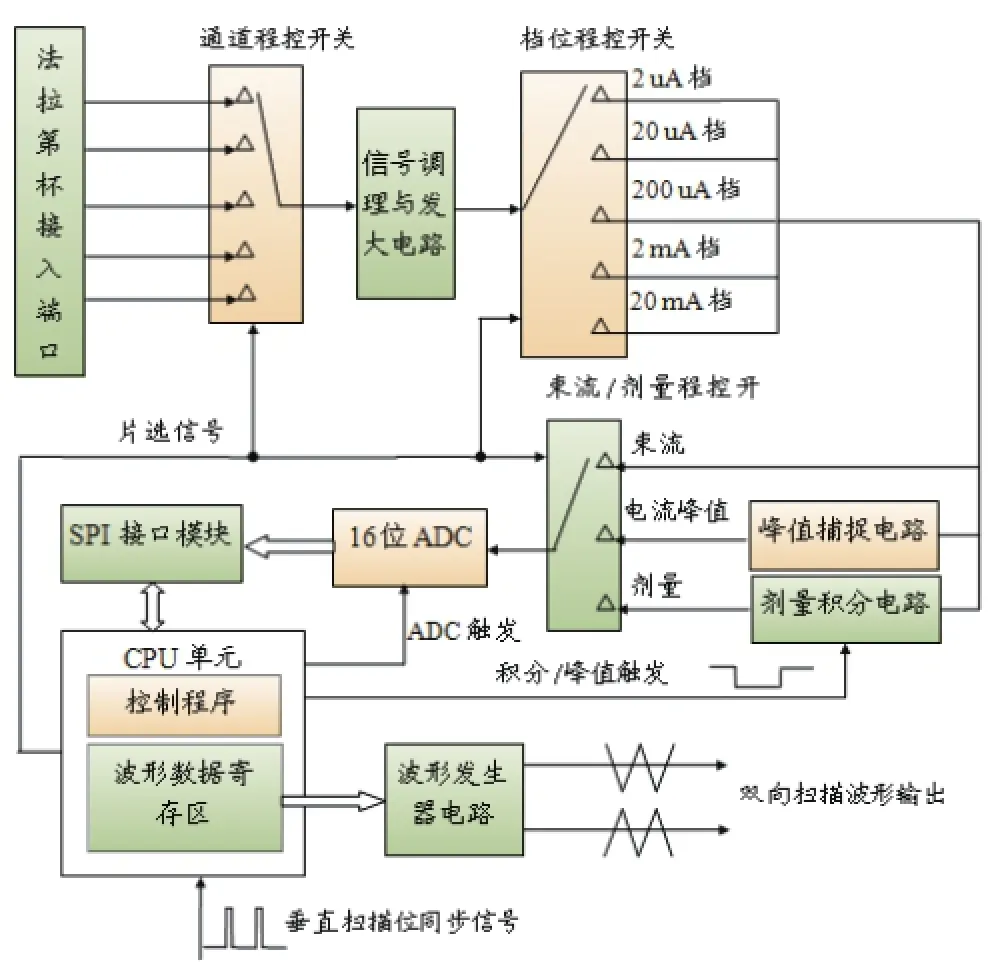
图5 剂量控制器系统构成
所述CPU单元采用16位单片机,主要功能存储扫描波形数据、运行控制程序、接收外部指令及垂直机械扫描同步信号和统一指挥协调其它功能模块工作等。通信接口采用通用的串口通信口(SPI),工作于从属模式,实现与外部数据的交互。信号调理电路主要功能是将法拉第杯获得的束流信号通过调理放大为0~10VDC电压信号,测量范围为0~20mA。为了提高测量精度,全程分为五个档位,分别是2uA、20uA、200uA、2mA和20mA档。测量精度非常高,其中,微安和毫安信号测量精度〈0.5%,纳安信号测量精度〈1.0%。CPU单元通过片选信号与通道程控开关、档位程控开关和束流/剂量程控开关相连,程控开关采用固态继电器组实现,控制法拉第杯通道选择、合适档位选择和采集目标的选择。剂量积分电路主要用于测量一段时间内法拉第杯采集的电荷量?s。束流峰值检测电路用于检测一段时间内束流的峰值,束流峰值主要用于合适的测量档位的选择。波形发生器的波形数据寄存在CPU单片的RAM中,每一点波形数据由4个字节组成,其中有两个字节为电压值,另外两个字节为此点电压对应的斜率值。扫描波形输出通过程序控制,当启动波形输出时,CPU单元会逐个地将电压坐标和斜率坐标送到波形输出执行电路,执行电路按给定的斜率输出扫描电压,并同时比较实际输出电压与给定是电压坐标值,当输出电压到达给定电压时,向CPU单元发出告知信号,CPU单元收到此信号后,将下一组波形数据送到执行电路。以下对剂量控制器主要功能模块进行介绍。
束流积分电路用于测量给定时间内束流离子的数量,其电路原理如图6所示。主要包括束流信号输入、积分控制信号、积分电压基准调节、积分信号零点漂移调节、积分电压泄放和积分信号输出电路等。当积分控制信号为低电平时,选通束流输入端,同时将积分泄放端悬空,启动束流积分功能。当积分控制信号变为高电平时,电流积分结束,积分输出可通过AD电路进行读取,同时泄放电路与地导通,积分电压信号泄放,并且电路具有积分电压基准调节和零漂调节等功能[3、4]。
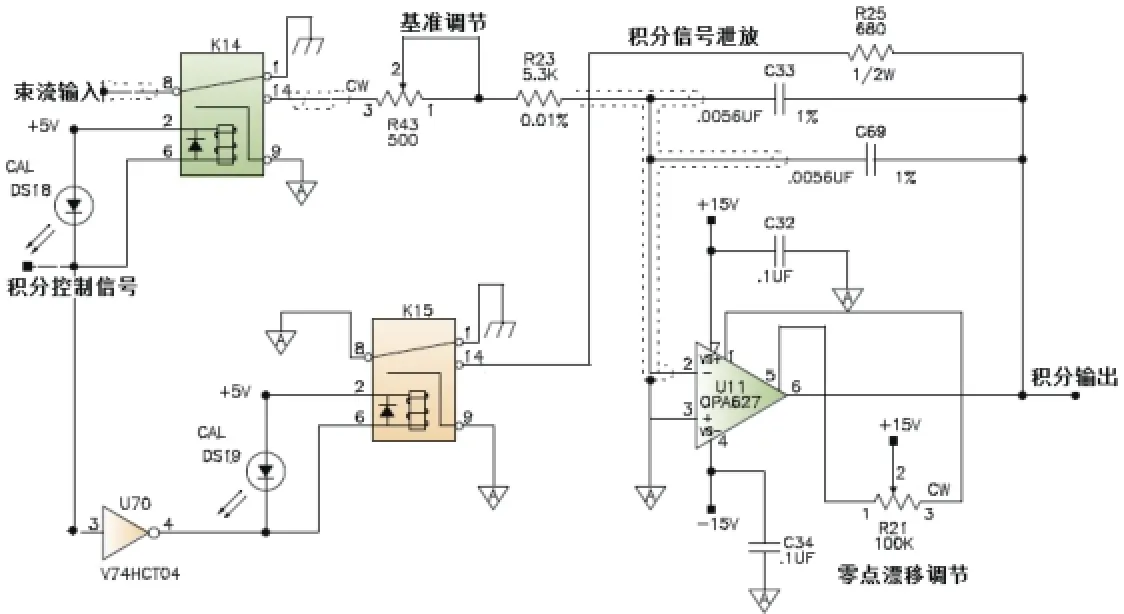
图6 束流积分电路设计
4 剂量控制器程序设计
剂量控制器控制程要实现的功能有与外部进行数据通信、波形数据接收与存储、波形数据上传、控制扫描波形输出和剂量值的标定等。
程序采用汇编语言进行设计。首先是通信接口定义,指令格式是:
[CommandID]:命令号,一个字节;
[DataParameters]:命令参数, 一个U8数据类型数组,不同的命令长度不同;
[CRC校验码]:校验码,2个字节。
例如,命令字:“03” 写波形数据
命令参数:[0] 存储起始地址高字节;
[1] 存储起始地址低字节;
[2] 波形数据组数高字节;
[3] 波形数据组数低字节;
[4] 第1点位置高字节;
[5] 第1点位置低字节;
[6] 第1点斜率高字节;
[7] 第1点斜率低字节;
[8] 第2点位置高字节;
以此类推。
离子注入机剂量控制器程序流程图如图7所示。

图7 控制程序流程图
5 实验与结论
该剂量控制器成功研制出了样机,并对样机的束流采集精度、波形输出特性等主要性能指标进行了测试,测试结果:束流测量纹波噪声小于2mV;束流和剂量测量精度均小于0.5%;在环境温度20±2℃条件下,4小时内测量漂移≤±0.5%;扫描波形输出功能正常,实测波形输出,如图8所示。

图8 扫描波形输出测量结果
通过波形数据构造了一个“W”波形,其形状和周期可通过修改波形数据和周期控制参数而改变。剂量采集功能正常,剂量测量结果如图9所示,当积分控制信号为低电平时,只要测量通道检测到束流,就会对束流进行积分,剂量积分信号累积升高;当积分控制信号变为高电平,剂量积分信号瞬间泄放到零电位。束流峰值捕捉功能正常等。实验验证此剂量控制器达到了设计要求,并将其成功地应用到离子注入机设备。
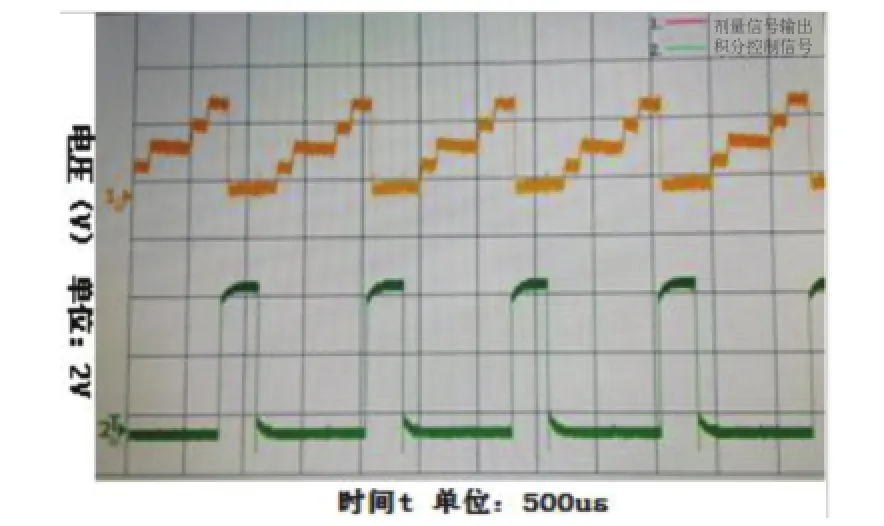
图9 剂量积分输出测量结果
[1] D Sing, Michael Rendon. Implant process control∶ Going beyond particles and RS [J]. Nuclear Instruments & Methods in Physics Research Section B-beam Interactions With Materials and Atoms, 2005, (237)∶ 318 - 323.
[2] Sano, Makoto, Yamada. Accurate Dose Control with Pressure Compensation System On Single - Wafer Ion implants [C]. Ion Implantation Technology∶ 17th international Conference, 2008 (6) ∶ 141 - 144.
[3] 陈淑芳. 一种高精度数据采集系统模拟信号调理电路的设计[J]. 长沙铁道学院学报, 2008 (3) ∶ 66 - 69.
[4] 刘晓东, 施艳艳, 李淑波. 开关线性复合式功率放大器波形发生电路设计[J]. 半导体技术, 2007 (9) ∶ 48 - 51.
Designing of a Dose Controller for Ion Implanter
Dose controller is a very important apparatus for an implantation machine. The main functions of this dose controller is to accurately measure beam current and injection dose, control the ion beam horizontal movement in the electric field, and make the ion evenly distributed in the horizontal direction and synchronous vertical scanning movement complete ion injection of dose controlBased on these functional requirements, a high accurate and multifunctional and programmable control dose controller for implant is presented in this paper. Firstly, the theory and function of the control system are introduced. Second, the hardware architecture and the design of some functional modules, and their function realizations in this control system are described. The control system is composed of three main function modules, such as current and dose accurately measure module, Scan wave generation and control module, a position synchronized sign from vertically mechanical scanning move detect and control module. Finally, the experimental results show that the performance of the ion implanter dose controller meets the design requirements.
Ion implant; Dose control; Scan wave; Position synchronize
B
1003-0492(2016)10-0092-04
TP332.3
钟新华(1975-),男,湖南衡南人,高级工程师,研究生学历,现就职于中国电子科技集团公司第四十八研究所,主要从事工业设备的自动控制技术和工业智能化制造技术方面的工作。
