基于ACS800变频器的泥浆泵软泵控制技术
2016-12-14李崇博西安宝美电气工业有限公司陕西西安710077
李崇博(西安宝美电气工业有限公司,陕西 西安 710077)
基于ACS800变频器的泥浆泵软泵控制技术
李崇博(西安宝美电气工业有限公司,陕西 西安 710077)
为保证钻井作业中的岩屑通过泥浆循环系统带出,钻井作业中都会配有泥浆泵,大型钻机一般都会配置2~3台泥浆泵。在钻井过程中多台钻井泵同时运行时,由于各个泵体的活塞无规律运动易引起管汇共振、水龙带跳动、随钻信号偏差和地层坍塌等问题。为解决这一问题,提出通过泵冲传感器采集活塞位置,ACS800变频器自定义编程功能设计专用程序控制变频器输出的软泵控制技术,从而实现整个管汇的压力波动平稳,减小对钻井过程的影响。
钻机;泥浆泵;软泵;ACS800
1 引言
在石油钻机系统中,为了将井底钻头破碎的岩屑及时携带到地面上来以便继续钻进,系统都配置了2~3台泥浆泵,每台泥浆泵有三个活塞,三个活塞分别按照120度相位差进行交错运动。当两台或者三台泥浆泵需要同时作业运行时,司钻操作启动泥浆泵是随意的,因此当泥浆泵运行时,泥浆泵的各个活塞向管汇里注入泥浆的运动是无规律的,相邻两次活塞向管汇注入泥浆的时间差都不一样。这样无规律地向管汇注入泥浆,对于泵体或者管汇系统来说会出现共振或者管路跳动,从而影响高压管路上的阀件、空气包、加速泵组件的疲劳,严重的甚至会由于压力的剧烈冲击造成井壁以及软地层出现塌方,造成井下事故,进而影响钻井作业生产。
近些年来无论在直流驱动钻机还是交流驱动钻机,都在探讨软泵技术的应用,有通过PLC系统控制,也有通过专用的控制模块控制,控制方式比较多。结合实际项目应用,提出通过泵冲传感器采集活塞位置进行时序判断,采用ACS800变频器自定义编程功能设计专用程序控制变频器输出的软泵控制技术。
2 软泵功能的控制原理
石油钻机每台泥浆泵有三个活塞,在一个周期运行时间内,每个活塞之间存在120度相位差。当系统配有两台泵,共计六个活塞,在一个周期的运行时间内,两台泵同时运行时每个活塞之间如果保证60度的相位差,对钻井作业的影响最小。同理,三台泵时保证每个活塞之间40度的相位差,对钻井作业的影响最小。
以两台泵的运行为例,为保证两台泵运行时活塞运动规律相差60度,在每台泵的同一个位置各安装一个泵冲传感器来检测泵杆的位置信号,以便于判断两台泵同一位置活塞的相位差。
对于1号泵的控制系统而言,2号泵的接近开关信号定义为MP2,当活塞运动到泵的顶端时我们定义为MP2=1,未到达顶端时我们定义MP2=0。
对于2号泵的控制系统而言,1号泵的接近开关信号定义为MP1,当活塞运动到泵的顶端时我们定义为MP1=1,未到达顶端时我们定义MP1=0。
两台泥浆泵同时运行时,泵冲传感器采集到的信号通过叠加计数,MP1=1的间隔时间定义为Tx。MP2=1和MP1=1的间隔时间定义为Ty,如图1所示。
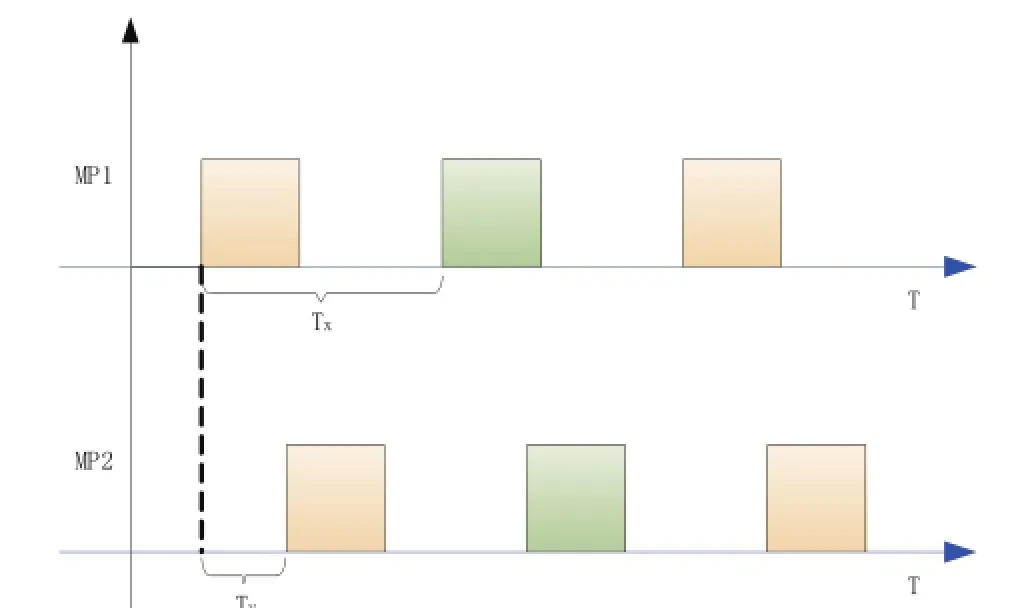
图1 泵冲接近开关信号时序示意图
为满足相位角的要求,当Ty〈Tx/6,就需要2#泥浆泵速度减慢,从而让Ty无穷接近Tx/6,当Ty〉Tx/6,就需要2#泥浆泵速度提升,从而让Ty无穷接近Tx/6。
理论上Ty=Tx/6是最理想的状态,但实际运行时会存在一定程度的偏差。系统定义最终的偏差控制10%以内,即,则认为软泵功能控制精度满足要求。
3 软泵功能实现的要求
在正常钻井作业过程中,泥浆泵运行泵冲设定都较高,并且泵冲给定相差不太大,因此在实现软泵功能时需要满足以下条件∶
(1)MP1和MP2的泵冲超过30冲,且泵冲之间的差小于10冲。
(2)软泵功能以MP1为基准,MP1的速度给定只接受PLC的调整,传动内部不进行调整。
(3)满足第一条的条件后,假如软泵功能投入,MP2的速度给定自动调整到与MP1相同的速度给定.
(4)对MP2的速度进行微调,使得两个泵六个活塞之间存在60度的相位差。
4 实例应用
在钻机50DBT的项目中,采用两台1200kW的交流变频电动机驱动分别驱动F1600的泥浆泵,驱动电机的变频器选用ABB公司生产制造的ACS800系列多传动交流传动装置。多传动系统的特点就是公共直流母线,所有的逆变器都从公共直流母排上来取电,选用两台ACS800-107-1740,进行一对一地驱动两台泥浆泵。
根据软泵的功能要求、控制原理和控制精度,使用变频器实现软泵功能时,主要利用变频器进行泵冲传感器数据的采集、相位角计算、数据处理和传输。系统设计采用变频器的RMIO主控板数字量输入端口采集泵冲传感器信号,使用ABB的自定义编程PC工具DriveAP对变频器进行自定义编程的创建、整理、编辑和下载,实现速度的同步、相位角的计算和速度的微调。
4.1 泵冲传感器的安装
为实现数字量端口接收信号,泵冲传感器选择安装在泥浆泵同侧的相同位置。软泵功能主要是控制泥浆泵2的速度,按照ABB项目图纸的定义,泵冲传感器的接线统一接到MP2柜中的数字量端口4(DI4)和端口5(DI5)。
4.2 软泵功能的实现
硬件条件满足后,软泵功能的实现主要依靠软件来实现。当司钻将每台泵的泵冲和泵冲差设置满足条件,然后启用软泵功能,系统首先判断是否满足前面提到的软泵功能要求的第一条,当满足条件后,变频器内部预先编写好的自定义编程程序将按照以下过程进行软泵的实现:
(1)将PLC发给MP1的速度给定值和实际速度值通过ABB的主从控制传输给MP2;
(2)自定义编程的程序检测MP1和MP2的当前速度差,然后调整使MP2的速度和MP1速度给定相同,从而达到泵冲相同;
(3)自定义编程的程序通过MP2柜内的RMIO数字量端口DI4和DI5的状态计算两个泵冲传感器信号的相位差时间,以MP1为基准,按照Ty和Tx/6的关系,对MP2的速度进行相位修正,将相位修正的速度给定值发送到MP2的附加给定,不断进行微调MP2的速度,使Ty无穷接近Tx/6。
软泵功能启动后,使用DriveWindow软件对泵冲传感器的信号进行监测。如图2所示,通过监测8.05组参数(DI状态字)的值,可以得到是DI4变化还是DI5变化,监测数据定义8.05为第四条曲线,即[4]曲线是ACS800的DI端口状态,16h和36h是DI4和DI5有信号的状态,DI4前后两次信号对应的时间为272.9s和274.37s,DI4和DI5对应的时间为273.13s和273.13s。

图2 泵冲信号采集图
按照图1中软泵信号时序定义的关系:
Tx =274.37-272.9=1.47s Ty =273.13-272.9=0.23s
精度计算:
Tx/6=1.47/6=0.245s 1.1×Tx=1.1×0.245=0.2695s 0.9×Tx=0.9×0.245=0.2205
5 结束语
使用泵冲传感器采集的信号作为时序控制的基础,通过开放的自定义功能进行变频器的控制,达到控制时序的目的。经过现场的试验、曲线监测和时序计算,软泵功能启用后,经过约17秒左右的时间调整,系统达到稳定运行状态,达到了软泵控制功能的要求和精度。这种控制方法线路简单、便于操作,对于减少钻井泵活塞无规律运行产生的负面影响有很好的作用,现在已经大面积在进行推广使用。
[1] 张奇志. 电动钻机自动化技术[M]. 北京∶ 石油工业自动化出版社, 2006.
[2] 赵芳豹. 电动钻机实现钻井泵软泵运行的控制技术研究[J]. 石油机械, 2003, 31 (6) ∶ 9 – 11.
[3] 北京ABB电气传动系统有限公司, 固件手册[Z]. 2009.
[4] 北京ABB电气传动系统有限公司, Multi Block Programming Application 7.x [Z]. 2006.
Based on the ACS800 Inverter Soft Mud Pump Control Technology
In order to ensure the cuttings in the drilling through out of the mud circulating system, the drilling operationwill be equipped with mud pump in the drilling operation, some large rigs are typically configured with 2~3 sets of mud pump. In the drilling process, when multiple drilling pumps are running simultaneously, the irregularity of the pistons of each pump body causes the problem of manifold resonance, water hammer jump, MWD signal deviation and formation collapse. Mud pump operation at the same time, the piston of the mud pump movement, but there is no rule, the movement cause resonance mud line even beat, and exerted a great potential safety hazard, high pressure manifold to solve this problem, we draw out soft pump solution, which uses the pump sensor to obtain the piston position, ACS800 inverter custom programming function designed to control the inverter output of the soft-pump control technology. Finally, it can achieve the entire manifold pressure fluctuations, and reduce the drilling process Impact.
Rig; Mud pump; Soft mud pump; ACS800
B
1003-0492(2016)10-0088-03
TP29
李崇博(1981-),男,工程师,陕西咸阳人,2005年毕业于西安理工大学机电系统智能控制专业,现就职于西安宝美电气工业有限公司,主要从事石油钻机电驱动控制系统设计、研究及服务工作。
