风电安装船运动响应分析及模型试验研究
2016-12-14孙丽萍赵志坚张利军
许 超,孙丽萍,赵志坚,张利军
(1.哈尔滨工程大学 船舶工程学院,哈尔滨 150001;2.中远船务工程集团技术中心,辽宁大连 116600)
风电安装船运动响应分析及模型试验研究
许 超1,孙丽萍1,赵志坚2,张利军2
(1.哈尔滨工程大学 船舶工程学院,哈尔滨 150001;2.中远船务工程集团技术中心,辽宁大连 116600)
为了分析风电安装船在实际海况下的运动响应及阻力性能,基于三维势流理论,本文对风电安装船进行频域和时域运动响应数值分析,并开展风电安装船模型试验,对航行阻力、幅频响应函数和在位运动响应进行试验研究。通过试验得到风电安装船在航速13 kn时阻力为899 kN,RAO响应曲线和不规则波中的运动幅值验证了数值计算的准确性。研究结果表明风电安装船在十年一遇的北大西洋海况中运动幅值较大,不宜进行安装作业。
风电安装船;模型试验;耐波性;阻力
0 引言
海上风电场的开发已受到越来越多的重视和关注,其中的一个难点在于风机整套设备的海上安装。风电安装船是近些年来新发展的一种特种工程船舶,它将运输船、海上作业平台和起重船的各项功能融为一体,可以独立完成整套海上风机设备的运输、安装和维护。中远船务技术中心作为设计单位,对某型号风电安装船母型船进行了优化设计,以满足航行性能和作业性能的要求。本文以中远船务提供的优化船型为研究对象,对新船型进行数值仿真和模型试验研究,以获得新船型在不同航速下的阻力性能和在实际海况中的运动响应。为风电安装船的设计开发和在实际海况中的作业提供参考[1]。
1 水动力性能数值分析
首先根据三维势流理论方法,在整个频域范围内对风电安装船进行辐射和绕射分析,获得在不同频率单位波幅规则波作用下的水动力参数,包括一阶波浪力传递函数 RAO、二阶波浪力传递函数QTF、附加质量以及辐射阻尼等,频域分析的水动力结果为后续风电安装船的时域运动响应分析打下基础[2]。
1.1 频域水动力分析
应用辐射和绕射分析计算理论对无航速的风电安装船在规则波下的运动进行分析,对于流场中的浮体,浮体在流场中的压力根据线性伯努利方程,可得:

对浮体整个湿表面单元进行压力积分,则作用在风电安装船上的波浪激励力为:

式中,fi为i方向的波浪激励力;ni为面元法向量;S为浮体湿表面。
浮体在受到波浪激励力的同时,浮体自身的运动也带动附近流场的变化,即产生了辐射势,则浮体对流体的反作用力可以写成:
式中,μij为浮体附加质量;λij为辐射阻尼[3]。
将波浪激励力和辐射力线性叠加,就得到了入射频率为ω时,作用在风电安装船的单位波幅规则波下的一阶波浪力:
浮体在频域范围内的一阶运动方程为:

式中,M为风电安装船总的质量矩阵;λ为附加质量矩阵;C为系统线性阻尼矩阵;K为系统总刚度矩阵;F(w)为波浪载荷(单位波幅),w为波浪频率;x为幅值响应算子(RAO)。
基于上述理论,用水动力分析程序AQWA对风电安装船进行频域分析,二阶波浪力采用近场方法求得。其中,风电安装船横摇和纵摇的一阶波浪力传递函数RAO,如图1所示,纵荡和横荡的二阶波浪力传递函数QTF如图2所示。

图1 满载状态横摇和纵摇RAO结果

图2 满载状态横荡和纵荡QTF
1.2 时域运动响应分析
频域分析通常只适用于稳态问题,无法解决瞬态问题和强非线性问题。对于风电安装船在恶劣海况下的大幅值运动,须在时域内模拟船体在波浪环境中的运动响应。在时域内建立风电安装船和系泊系统的运动控制方程,所受的外载荷主要包括波浪力和系泊力,运动耦合方程为:

式中,M为风电安装船质量矩阵;λ为附加质量矩阵;C为阻尼矩阵;K为刚度矩阵;Fwave为波浪载荷(包括高频波浪力和低频慢漂力);Fmooring为系泊系统对风电安装船提供的系泊力[4]。
基于上述理论和海洋环境条件,用AQWA软件的DRIFT模块对风电安装船进行时域运动响应分析,计算出结构总力,求得结构加速度,进而求得结构最新位置,重复以上步骤求得模型的运动响应。模型采用四根水平系泊线布置,系泊线刚度为2.78E6(N/m),1号和3号系泊线长度为1 023 m,2号和4号系泊线长度为1 062 m,计算模型如图3所示。波浪为JONSWAP谱波浪,有义波高8.4 m,谱峰周期12.16 s,浪向角为135°和180°,时间步长为0.12,步数为90 000步,每个工况模拟时间为3小时[5,6]。其中图4为风电安装船135°浪向角时横摇、纵摇和垂荡时域运动响应模拟结果。
图3 时域运动响应计算模型
2 模型试验研究
2.1 试验条件介绍
模型试验在哈尔滨工程大学多功能深水池和船模拖曳水池进行。多功能深水池长50 m,宽30 m,深10 m,水池配备75单位的摇板式多单元造波系统,在本次RAO试验和不规则波试验中需要用到。船模拖曳水池长108 m,池宽7 m,水深3.5 m。在本次静水拖航阻力试验中需要用到日本制造的四自由度适航仪。

图4 时域运动响应模拟结果
2.2 试验内容
本次试验主要是为了得到风电安装船的相关水动力特性,为后续设计与分析提供依据。需要开展静水拖航阻力试验、RAO试验和不规则波试验。分别得到风电安装船的阻力性能、RAO特征和实际海况中的运动特征,并与数值计算结果相比较。根据国际海洋工程模型试验相关规范,本次试验按照缩尺比1:50制作模型。模型用玻璃钢材料由倒模技术制成,实船型线如图5所示,模型如图6所示。为了方便调整模型属性参数,将模型沿甲板边线增高350 mm,不影响模型原船体型线,原模型具体参数如表1所示。
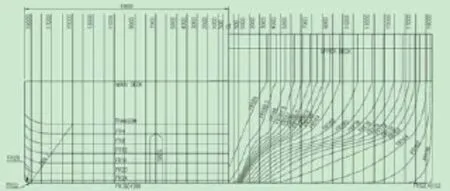
图5 风电安装船横剖线图

图6 风电安装船模型

表1 模型属性值
3 试验结果分析
3.1 阻力试验结果
在哈尔滨工程大学船模拖曳水池开展了风电安装船的拖航阻力试验[7],图7为进行拖航阻力试验的过程。拖航航速由实船航速6 kn~13 kn换算得到,船模吃水分别为压载和满载状态,航向角为180°,船模阻力由测力天平测得。采用傅汝德换算法求得实船阻力,摩擦阻力由1957ITTC公式求得,其中满载状态阻力结果如表2所示。试验过程中发现,船舶首部与平行中体的过渡段附近有较大的兴波,原因在于此处型线变化梯度大。实船阻力曲线如图8所示,阻力曲线为二次抛物线形态,符合理论基础[8]。
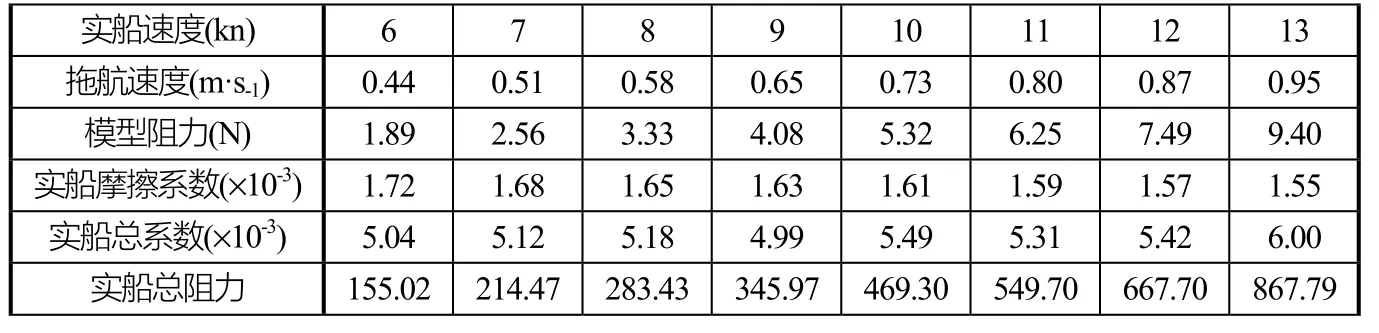
表2 风电船满载状态阻力试验结果

图7 拖航阻力试验
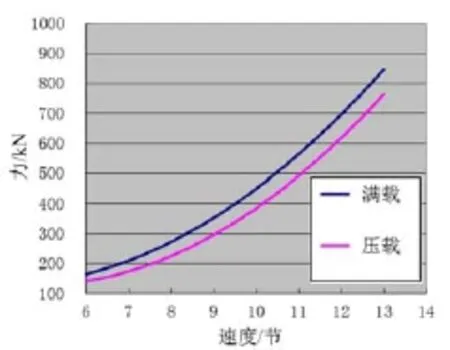
图8 风电安装船阻力试验结果
3.2 RAO试验结果
模型在规则波中的试验,根据线性系统假设,输入的单变量是波浪,记做x,一般由波浪谱密度函数Sx(ω)表示输入波浪的大小。输出的单变量是模型响应(运动),记做y,一般由响应谱密度函数Sy(ω)表示模型运动响应大小,模型在单位波幅下的运动响应幅值(RAO)记作Hj(ω)[9],则:


图9 风电安装船RAO试验过程
RAO试验过程如图9所示。根据模型试验得到风电安装船在白噪声波谱中的运动响应,将时域信号进行傅立叶变换,得到频域信号,再进行平滑处理得到船舶在不同浪向角下各自由度的RAO。限于篇幅有限,选择两种典型工况下的运动状态对比结果进行分析,其中风电安装船 90°浪向角横荡和横摇RAO对比分析结果如图10和图11所示,180°浪向角纵荡和纵摇RAO对比分析结果如图12和图13所示。从图中可以看出,数值计算结果和试验结果比较吻合,验证了数值算法的准确性,风电安装船满载状态下横摇固有周期为13.5 s,纵摇固有周期为11 s。

图10 满载状态90°横荡RAO对比分析

图11 满载状态90°横摇RAO对比分析

图12 满载状态180°纵荡RAO对比分析
3.3 不规则波试验结果
针对风电安装船满载状态,180°和135°浪向角两种工况开展不规则波试验。图10为风电安装船满载状态135°浪向角时不规则波试验过程,系泊布置方式与数值计算的布置方式一致[10]。波浪为JONSWAP谱波浪,有义波高8.4 m,谱峰周期12.16 s。其中对风电安装船满载状态 135°浪向角工况下的运动响应幅值进行统计分析,换算为实船运动响应,并与时域运动响应数值计算结果进行对比分析,所得结果如表3所示。由于数值计算不能准确模拟船舶在恶劣海况下的强非线性运动,所以时域响应计算与试验结果有一定的误差。
图13 满载状态180°纵摇RAO对比分析

图14 风电安装船不规则波试验过程

表3 时域运动响应对比分析结果
4 结论
在阻力试验中,船首与平行中体的过渡区域有较为明显的型波,型波逐渐向船尾及两侧扩散,说明此处型线变化梯度大。通过RAO试验得到风电安装船满载状态下的横摇和纵摇固有周期,并且验证了AQWA程序对RAO计算的可行性,风电安装船在波浪周期为 11 s~13 s的海况下作业非常危险。随着波浪周期的增大,风电安装船在单位波幅下的横荡和纵荡运动趋近于波高。在不规则波试验中,风电安装船的纵横摇角达到10°,船首波浪抨击现象严重,并且船体有较大范围的纵荡运动。时域运动响应计算结果与试验结果误差较大,原因在于AQWA程序不能模拟自由液面的动态变化,模型纵横摇运动角度越大,模拟结果越不准确,这是需要进一步研究的问题。本文的研究结果对风电安装船的设计开发和实际作业具有指导意义。
[1]郝金凤,强兆新,丁君海,等.风电安装船线型设计及性能分析[J].船舶工程,2014(S1): 226-230.
[2]张凤伟.风机安装船海上作业运动及其流体动力分析[D].哈尔滨: 哈尔滨工程大学,2012.
[3]马汝建.任意结构形状的大型海洋结构物的附加质量[J].中国海洋平台,1995,102(2): 65-71.
[4]Zhang X,Zou Z.Estimation of the Hydrodynamic Coefficients from Captive Model Test Results by Using Support Vector machines[J].Ocean Engineering,2013,73(4): 25-31.
[5]赵亚楠.海上自升式安装船环境载荷分析与桩腿驱动控制研究[D].哈尔滨工程大学,2012.
[6]张婷,贺捷,黄锦林.海洋平台波浪荷载数值模拟研究[J].船海工程,2013(5): 150-154.
[7]周广利,黄德波,李凤来.船模拖曳阻力试验的不确定度分析[J].哈尔滨工程大学学报,2006(3): 377-381,390.
[8]闫蕾,宗智,倪少玲,等.半滑行前三体船型模型阻力对比试验研究[J].船海工程,2013(1): 41-44.
[9]杨建民,肖龙飞,盛振邦.海洋工程水动力学试验研究[M].上海: 上海交通大学出版社,2008.
[10]刘建峰.自升式海上风电安装船的模型试验分析研究[J].造船技术,2014(1): 21-25.
中国船级社(CCS)将发布全球首部LNG运输船兼作浮式储存装置实施指南
中国船级社(CCS)制定的《液化天然气运输船兼作浮式储存装置实施指南》顺利通过了来自海事管理机构、航运企业、能源公司、设计单位、科研院所、造船厂、设备厂家等单位的30余位专家和代表的评审,于2016年7月正式发布实施。届时,该指南将成为全球首部LNG运输船兼作浮式储存装置(FSU)实施指南(以下简称LNG-FSU指南)。
LNG-FSU指南主要包括附加标志授予、适应性条件评估、连接系统、通讯系统、应急系统、系泊系统、兼容性评估、货物安全操作及风险评估等方面的技术要求。
从技术要求的安全可靠性、可实现性、可操作性的角度出发,基于中国自主设计建造的首艘LNG运输船“海洋石油301”在印尼作为FSU作业的实例专题研究,CCS对LNG运输船兼作FSU作业进行了全面分析,充分考虑了LNG运输船兼作FSU作业时的风险、作业的兼容性和货物安全操作等问题,以及船舶水动力特性、FSU与补给船之间相对运动对连接系统和系泊系统带来的影响,提出了相应的风险评估内容、评估结果、风险控制措施和技术要求。
该指南紧密联系工业界的最新需求,紧跟全球发展热点,理论与实践相结合,对促进和引导LNG浮式储存装置的发展具有重要意义。
来源:中国船级社
Motion Response Analysis and Model Test Study of Wind Turbine Installation Vessel
Xu Chao1,Sun Li-ping1,Zhao Zhi-jian2,Zhang Li-jun2
(1.Harbin Engineering University,Harbin 150001,China; 2.COSCO Shipyard Group Co.,Ltd.,Liaoning Dalian 116600,China)
In order to study the motion response and resistance performance for the wind turbine installation vessel (WTIV),based on the three-dimensional potential flow theory,the numerical analysis of the vessel’s motion response is conducted in frequency and time domain.The model test of the WTIV is also carried out,including resistance test,RAO test and irregular test.Through the test,the resistance of the WTIV at the speed of 13 kn is 899 kN.The RAO response curve and the motion value of the irregular test verify the accuracy of the numerical calculation.The results show that the WTIV has large motion value in the serious sea condition of ten years on the North Atlantic Ocean,which is not suitable for installation.
wind turbine installation vessel (WTIV); model test; sea-keeping performance; resistance
U661.43
A
10.14141/j.31-1981.2016.04.007
工信部高技术船舶科研项目(工信部联装2011536号)。
许超(1990—),男,硕士研究生。研究方向:海洋工程结构水动力学。