双纽线型起重机两种类型变幅机构的比较
2016-12-13李克勤姜翠香
李克勤,姜翠香
(1湖北工业大学机械工程学院,湖北 武汉,430068; 2武汉科技大学理学院,湖北 武汉,430065)
双纽线型起重机两种类型变幅机构的比较
李克勤1,姜翠香2
(1湖北工业大学机械工程学院,湖北 武汉,430068; 2武汉科技大学理学院,湖北 武汉,430065)
双纽线型变幅机构的特点是臂架和后摇杆活动范围大、外观和几何形态特别、重心低.该双纽线型变幅机构有两种型式:一种是后摇杆驱动型,另一种是臂架驱动型.运用反求设计和机构学原理来分析该双纽线型的两种类型变幅机构,分析和研究它们的运动学和变幅力矩,并以一台起重量为160 kN的该类型起重机加以验证.
变幅机构; 运动学分析; 变幅力矩; 双纽线型起重机
LI Ke-qin1,JIANG Cui-xiang2
(1.School of Mechanical Engineering,Hubei University of Technology,Wuhan 430068,China;2 College of Science,Wuhan University of Science & Technology,Wuhan 430065,China)
针对欧洲的专利[1]产品,运用反求设计和机构学原理来分析双纽线型起重机的两种类型的变幅机构的运动学和变幅特性.双纽线型起重机的变幅机构的特点是臂架与后摇杆的活动范围大、外观和几何形态特殊、重心低.双纽线型起重机已在欧洲一些重要港口的转载、过驳等装卸作业中发挥着显著作用,作业效率高.以一台起重量为16 t的双纽线型起重机为例,抓取铁矿石时,700 t·h-1,抓取散粮等时,500 t·h-1[2].现在已经开发有16,25,36,50 t等系列的产品[3].
双纽线型起重机的变幅机构有两种类型:一种为后摇杆驱动型[2],另一种为臂架驱动型[1,3].
1 双纽线型变幅机构的驱动形式比较
1.1 后摇杆驱动型
后摇杆驱动型双纽线型变幅机构的最大特点是臂架和后摇杆的活动范围很大,自重平衡系统设在后摇杆的尾部,后摇杆既受拉力又受弯矩作用.后摇杆由特殊装置驱动,实现水平平衡变幅作业.图1所示为后摇杆驱动型双纽线型变幅机构.
1.2 臂架驱动型
臂架驱动型双纽线型变幅机构的最大特点是驱动臂架,且臂架的活动范围很大,使后摇杆的受力情况大为改善.臂架有专门装置驱动,可实现水平平衡变幅作业操作.图2为臂架驱动型双纽线型变幅机构.

图1 双纽线型变幅机构(后摇杆为主动件)

图2 双纽线型变幅机构(臂架为主动件)
2 吊点的水平分速度比较
2.1 后摇杆驱动型的吊点水平分速度
后摇杆驱动型双纽线型变幅机构的运动简图如图3所示.图3中,X1为臂架;X2为象鼻架后臂;X3为后摇杆(主动件);X4为象鼻架前臂;X5为后摇杆下铰点O3与臂架下铰点O1之水平距离;X6为后摇杆下铰点O3与臂架下铰点O1之铅垂距离;X7为象鼻架的下沉量;X8为回转中心线与臂架下铰点O1之水平距离;R为幅度;γ为臂架与象鼻架后部之夹角;θ1为臂架与水平线之夹角;θ3为后摇杆与水平线之夹角;β为A点速度向量与水平线之夹角;β0为象鼻架前臂与后臂之夹角;α为象鼻架前臂与水平线之夹角;ω3为驱动后摇杆之角速度.
后摇杆驱动型的吊点水平分速度对变幅作业的影响直接,铰接点C为共同点,其水平分速度可由式(2)得到.
(1)
式中:vC为铰接点C的线速度;ω3为驱动后摇杆之角速度;ωP为绕速度瞬心P的瞬时角速度.
(2)
式中:vA为吊点A的线速度;vAX为吊点A的水平分速度.

图3 后摇杆驱动双纽线型变幅机构运动简图
2.2 臂架驱动型的吊点水平分速度
臂架驱动型双纽线型变幅机构的运动简图如图4所示.同样,臂架驱动型的吊点水平分速度对变幅作业性能的影响很大,铰接点B为共同点,吊点A的水平分速度vAX可由式(4)得到.
(3)
式中:vB为铰接点B的线速度;ω1为驱动臂架之角速度.
(4)
3 两种变幅机构的变幅力矩的比较
3.1 后摇杆驱动型的变幅力矩
从图3可知,后摇杆驱动型的变幅机构的变幅力矩[4-9]是对铰接点O3的.

图4 臂架驱动双纽线型变幅机构运动简图
其变幅力矩MQ可由式(5)求得.
(5)
式中:Q为起重量.
(6)
式中:XA,XP为吊点A、速度瞬心P的横坐标.
3.2 臂架驱动型的变幅力矩
从图4可知,臂架驱动型的变幅机构的变幅力矩[10-11]是对铰接点O1的.
其变幅力矩可由式(7)求得.
(7)
(8)
4 两种变幅机构的实例分析与比较
由文献[12],后摇杆驱动型变幅机构的已知数据有:X1=19.3 m,X2=6.5 m,X3=14.7 m,X4=16 m,AC=22.3 m,X5=6.4 m,X6=5.3 m,最大外伸距(从回转中心线算)30 m时θ3=49°,最小外伸距10.5 m时θ3=132°.
但是,臂架驱动型变幅机构就找不到原始数据.由于其两者外形的相似,可以将后摇杆驱动型变幅机构的相关信息借鉴过来用于臂架驱动型变幅机构,故可推测得到θ1=60~120°.
通过MATLAB软件包编程计算求解得两种变幅机构的水平分速度VAX、变幅力矩MQ,其结果见图5和图6.

图5 水平分速度的比较(假设驱动角速度为1)
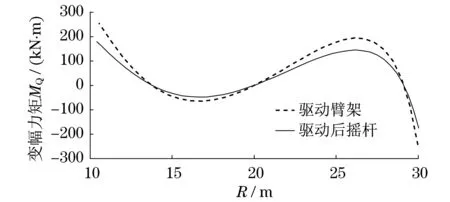
图6 变幅力矩的比较
5 结论
双纽线型起重机的象鼻架为长型,加之其构型特别,非常适宜带载变幅作业.
其后摇杆驱动型,虽然水平分速度和变幅力矩均很理想,适合带载变幅作业,但是,后摇杆既受拉力作用又受弯矩的作用,受力状况复杂,不利于后摇杆的结构设计.
其臂架驱动型,虽然水平分速度和变幅力矩都有所增大,但是,使得后摇杆的受力状况大为改善.
[1] NIEUWENHUIS G,DORRESTEIJN J J.Crane:Netherland,EP1048606A1 [P].2000-11-02.
[2] 李克勤.后摇杆驱动臂架型起重机变幅系统分析与优化设计的研究[D].武汉:武汉交通科技大学,1993.
LI Keqin.Research on analysis and optimal design of luffing system of jib type crane with back-rocker driving [D].Wuhan:Wuhan University of Water Transportation,1993.
[3] KENZ-FIGEE B V.Brochure of Kenz-Figee:offshore & harbour cranes[EB/OL].2011-02-08.http:// www.Kenz-Figee.com.
[4] 李克勤,姜翠香.后摇杆驱动臂架起重机的变幅机构反求设计[J].起重运输机械,2002(5):8-9.
LI Keqin,JIANG Cuixiang.Inverse design of luffing mechanism of jib type crane with back-rocker driving[J].Hoisting and Conveying Machinery,2002(5):8-9.
[5] 李克勤.具有近似水平直线运动轨迹双摇杆变幅机构的运动学分析与计算[J].港口装卸,2002(2):5-7.
LI Keqin.Kinematics analysis and calculation of a double-rocker luffing mechanism(with back-rocker driving) with approximately horizontal Locus[J].Port Operation,2002(2):5-7.
[6] 李克勤,姜翠香.一种新型四连杆变幅机构的反求与MATLAB实现[J].湖北工业大学学报,2008(3):76-77,80.
LI Keqin,JIANG Cuixiang.An inverse design of a new double-link luff mechanism and realization on MATLAB[J].Journal of Hubei University of Technology,2008(3):76-80.
[7] LI Keqin,JIANG Cuixiang.Inverse design of a new double-link luffing mechanism and realization on MATLAB [C].Proceedings of the Third International Conference on Mechanical Engineering and Mechanics,Monmouth Junction:Science Press USA Inc.,2009:301-304.
[8] 李克勤,姜翠香.新型后摇杆驱动四连杆变幅机构的传力特性与变幅力矩分析[J].科学技术与工程,2011(35):8723-8730.
LI Keqin,JIANG Cuixiang.Transmission characteristic and luff moment of a new double-link luff mechanism with back-rocker driving[J].Science Technology and Engineering,2011(35):8723-8730
[9] 李克勤,姜翠香.新型后摇杆驱动四连杆变幅机构的受力分析与程序实现[J].科学技术与工程,2012(13):3231-3234.
LI Keqin,JIANG Cuixiang.Force analysis and implementation of a new double-link luffing mechanism with back-rocker driving[J].Science Technology and Engineering,2012(13):3231-3234.
[10] LI Keqin,LI Junning.Kinematics and luffing moment of lemniscate type crane with boom driving[J].Advanced Materials Research,2012,503-504:923-926.
[11] LI Keqin,LI Junning.Force analysis of luffing mechanism of lemniscate type crane with boom driving[J].Advanced Materials Research,2012,538-541:2618-2621.
[12] UICKER J,PENNOCK G R,SHIGLEY J E.Theory of machines and mechanisms [M].4th ed,New York:Oxford University Press Inc.,2010.
Comparative study on two luffing mechanismsof lemniscate type cranes
Due that the luffing mechanism of lemniscate type cranes possesses such features as bigger range of boom and rear rocker,special pattern of shape and geometric and low height of weight,two types of luffing mechanisms regarding boom and rear rocker are analyzed using the inverse design and mechanism theory.Based on the kinematics and luffing moment,a crane with 160 kN loading capacity is used for verification.
luffing mechanism; kinematical analysis; luffing moment; lemniscate type crane
李克勤(1965-),男,副教授.E-mail:leekeqin@163.com
TH 218
A
1672-5581(2016)01-0050-04