ETLS干扰力矩抑制及加载性能改善方法
2016-12-12赵文德唐琪张铭钧
赵文德, 唐琪, 张铭钧
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
ETLS干扰力矩抑制及加载性能改善方法
赵文德, 唐琪, 张铭钧
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
本文研制了ETLS的实验样机,建立了考虑加载系统摩擦非线性的ETLS综合数学模型。本文研究舵机系统位置扰动造成的多余力矩干扰问题,提出基于舵机系统输出角速度的前馈补偿控制进行抑制;考虑到加载系统的摩擦非线性问题,本文采用基于死区逆的方法进行补偿。接着,本文在力矩加载中存在幅值衰减和相位滞后问题上,采用基于最小均方差(leastmeansquareerror,LMSE)的幅相控制算法进行抑制以提高ETLS的加载性能,并提出基于Sigmoid函数变步长LMSE的幅相控制算法减小算法中收敛速度和稳态精度对步长需求相互矛盾,以提高算法整体改善。最后,通过仿真和实际实验,验证本文干扰力矩抑制和加载性能改善方法的有效性,在0.5Hz和5Hz频率下,基于本文方法的跟踪精度分别提高了87.0%和64.9%。
电动式扭矩加载系统;多余力矩;死区逆;幅相控制;前馈补偿控制;最小均方差
电动式扭矩加载系统(electricaltorqueloadingsystem,ETLS)用于实验室环境中模拟飞行器舵机系统在正常运行或调整自身姿态时受到的外界阻力矩[1],通过实验数据的分析完成对舵机系统性能的测试。在测试实验中,ETLS的加载性能影响着实验数据的精确度,从而直接关系着测试实验结果是否可信。因此,研究ETLS干扰力矩抑制和加载性能改善方法具有重要的研究意义和实用价值[2]。
多余力矩是ETLS输出力矩为零时,由舵机系统的位置扰动而产生的不必要的力矩输出[3]。文献[4]将扰动观测器补偿算法应用于ETLS中,提出了基于扰动观测器的双回路控制系统设计方法,但是该方法只适合处理连续的信号;文献[5]提出辅助同步补偿的方法消除多余力矩,但是不同舵机系统的位置闭环特性造成加载系统和舵机系统难以实现运动完全同步。
摩擦现象是ETLS中的一个典型的非线性时变因素,摩擦现象的存在会降低控制系统的线性控制度[6]。文献[7]对基于非模型的摩擦补偿方法中的高增益PID和小信号振荡等方法进行了详细阐述,该类方法原理较为简单,在工程上应用较为广泛,但难以适用于参数时变的系统;文献[8]探讨了基于模型的摩擦补偿方法,该类方法的关键在于摩擦模型的建立,在实际使用中需要在摩擦模型的精确度和算法运行速度方面综合考虑。
在上述分析基础上,针对本文所研制的ETLS实验平台,本文提出干扰力矩抑制和加载性能的改善方法,并通过本文所研制的ETLS实验平台上的实际实验,对本文所提方法的有效性进行实验验证。
1 ETLS的硬件组成
本文将自行研制的ETLS分为加载系统和舵机系统,其中加载系统由D/A控制卡、A/D控制卡、脉冲计数卡、加载驱动器、直流力矩电机、扭矩传感器、信号处理模块等组成,是一个力矩伺服系统;舵机系统由永磁同步电机、角度传感器、舵机驱动器、减速器和控制电路组成,是一个位置伺服系统。系统的整体组成框图如图1所示。多余力矩为永磁同步电机和减速器输出的位置扰动造成的;试验中通过控制永磁同步电机的角相位置来模拟舵机的位置扰动。本文的舵机系统加入减速器是为了模拟真实的飞行器舵机系统的位置扰动而设计的,在真实系统中并不存在,故文中没有考虑减速器的摩擦力矩,此外,文中联轴器视为刚性连接环节,可忽略其摩擦力矩。
2 ETLS数学模型的建立
为了针对性的解决ETLS中存在的多余力矩和摩擦非线性问题,本文考虑加载系统的摩擦非线性,并基于ETLS的线性数学模型建立ETLS的综合数学模型。
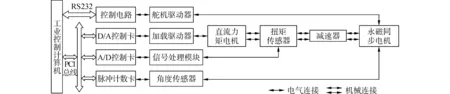
图1 ETLS硬件组成框图Fig.1 Hardware architecture of ETLS
2.1 ETLS的摩擦非线性模型
本文进行了摩擦力矩测试实验,以便为建立摩擦非线性模型提供数据支持。
摩擦力矩测试实验:以本课题组研制ETLS作为实验载体,通过联轴器将舵机系统和加载系统连接,使舵机系统以速度模式进行运转。实验得到摩擦力矩与角速度的关系曲线,如图2所示。
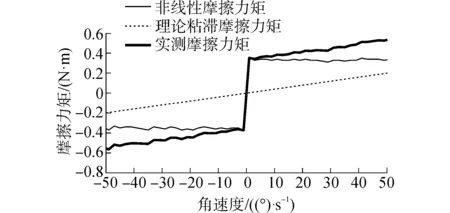
图2 角速度与摩擦力矩关系曲线Fig.2 Relationship between angular velocity and friction
分析图2可知,图中粗实线为实测摩擦力矩,其中包含着非线性摩擦力矩和粘滞摩擦力矩,为了将加载系统中的非线性摩擦力矩分离出来,本文进行了如下工作:通过计算得到理论粘滞摩擦力矩曲线(如图2中虚线所示),并将实测摩擦力矩减去粘滞摩擦力矩,得到加载系统的非线性摩擦力矩如图中细实线所示。由非线性摩擦力矩曲线可知,加载系统在角速度50~0(°)/s范围内的非线性摩擦力矩为0.33~0.37N·m,可见非线性摩擦力矩大小基本为一个定值,因此本文用库伦摩擦模型对非线性摩擦模型进行简化。
得出加载系统的摩擦非线性模型的表达式:
(1)

基于库伦摩擦模型推算摩擦死区模型,得到摩擦死区表达式为

(2)
式中:x(t)表示死区输入信号,y(t)表示死区输出信号,0.35为死区大小。
2.2 ETLS的综合数学模型
本文对直流力矩电机的力矩平衡方程式进行分析可得,当考虑加载系统的摩擦非线性时,本文的力矩平衡方程可转化为
Tm(s)=JmsΩm(s)+BmΩm(s)+Tj(s)+Tf(s)
(3)
式中:Tm(s)为直流力矩电机电磁转矩,Tj(s)为加入的库伦摩擦力矩。
根据加载系统开环模型和以永磁同步电机为执行机构的舵机系统的位置闭环模型[9]各物理量之间的相互关系,建立了ETLS的综合数学模型,如图3所示。
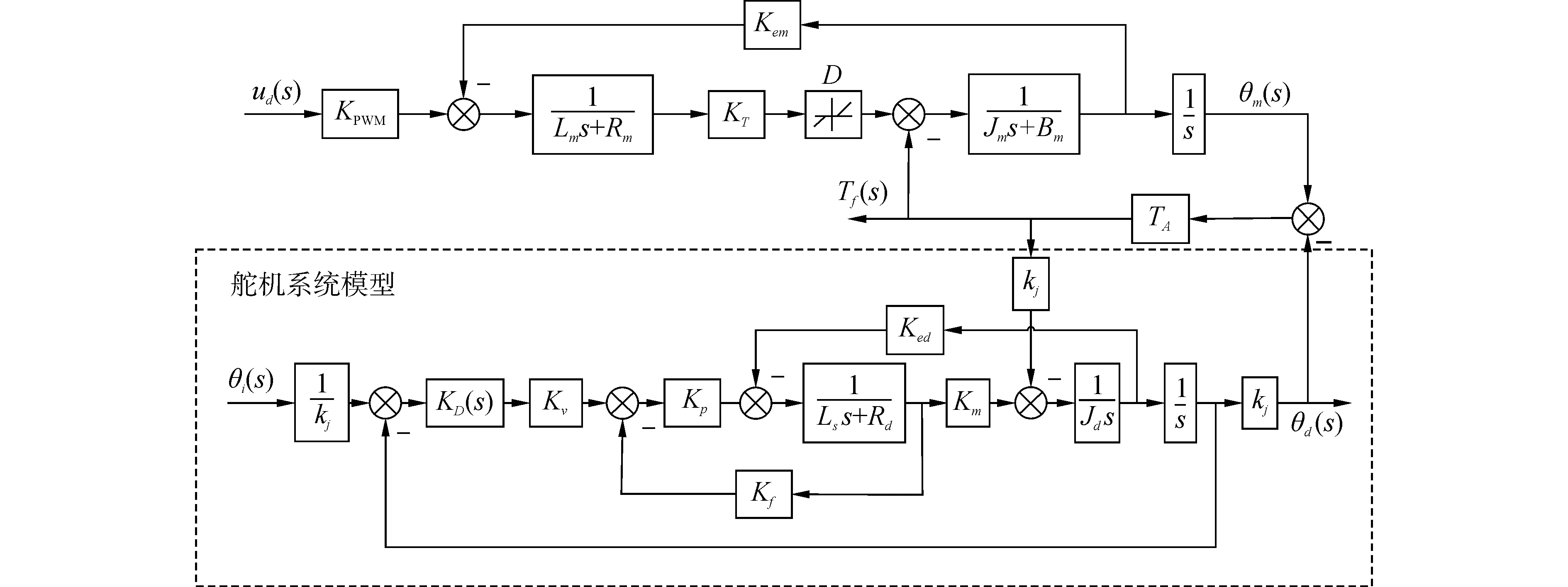
图3 ETLS综合模型框图Fig.3 Integrated block for ETLS
图3中,D为摩擦非线性因素形成的摩擦死区环节,ud(s)和Tf(s)分别加载系统的输入控制电压和输出力矩,θi(s)和θd(s)分别为舵机系统的输入角位移指令和输出角位移。
3 ETLS干扰力矩抑制方法研究
针对ETLS中存在的干扰力矩问题,本文提出采用基于舵机系统输出角速度前馈补偿控制和死区逆补偿相结合的方式实现干扰力矩的抑制。
3.1 多余力矩抑制方法研究
对于本文研制的ETLS而言,其系统参数变化相对较少,同时加载频率在10Hz以下,因此本文采用经典控制理论中的前馈补偿控制来抑制多余力矩,并通过仿真实验进行了验证。
1)前馈补偿环节的设计
前馈补偿环节的设计需要一个可以测量的外界扰动,以抵消外界扰动对系统输出的影响。本文采用基于舵机系统的输出角速度的前馈补偿控制实现多余力矩的抑制。
将基于舵机系统输出角速度的前馈补偿环节Gw(s)加入到加载系统的控制框图中,得到加入前馈补偿环节后的加载系统控制框图如图4所示。

图4 引入前馈补偿环节后加载系统控制框图Fig.4 Feedforwad compensation for loading system
根据图4,本文得到加载系统输入输出表达式:
Tf(s)=G1(s)ud(s)+[G1(s)Gw(s)s-G2(s)]θd(s)
(4)
式中:G1(s)为加载系统的控制电压与加载系统的输出力矩的传递函数,G2(s)为舵机系统的输出角位移与加载系统的输出力矩的传递函数,Gw(s)为前馈补偿环节的传递函数,G1(s)、G2(s)表达式分别为

(5)
(6)
Gw(s)由式(4)可得到本文前馈补偿环节的理论形式为
Gw(s)=
(7)
为了物理可实现,本文在前馈补偿环节基础上串联一个二阶滤波环节[9],得到:
Gw(s)=
(8)
通过仿真得到,对于本文所研究的ETLS,当a=0.000 01时多余力矩的抑制比最高,将其和加载系统模型参数代入式(8)可得:
(9)
在实际使用中,高次微分的存在会造成舵机系统位置信号检测的滞后,在一定程度上降低了多余力矩的抑制效果[9]。针对该问题,本文对式(9)进行降阶处理[10],得到最终的前馈补偿环节为
(10)
2)前馈补偿环节降阶的仿真实验
在仿真试验中,加载系统的力矩输入指令为0,舵机系统输入正弦位置指令:幅值为5°,频率分别为0.5、2和5Hz,得到多余力矩的抑制效果指标如表1所示。
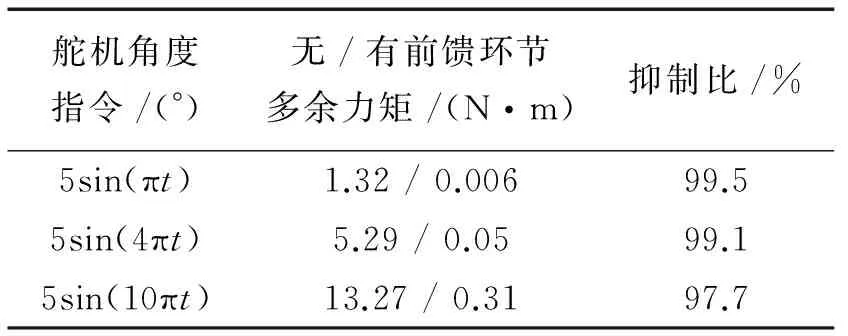
表1 不同频率下多余力矩抑制指标
由表1知,加入前馈补偿环节之后,各频率下多余力矩幅值分别减小99.5%、99.1%、97.7%,可见,前馈补偿环节对多余力矩的抑制效果很明显。
3.2 摩擦非线性抑制方法研究
在ETLS中,摩擦非线性的存在会造成力矩加载的死区,影响力矩输出的精度[11]。针对这一问题,本文在2.1节ETLS摩擦模型的基础上,采用基于死区逆的补偿控制从死区的补偿角度研究摩擦非线性的抑制方法,并通过仿真实验进行了验证。
1)基于死区逆的补偿环节设计
根据死区逆的补偿原理,若是能在死区环节前直接串联死区逆补偿环节,如图5所示,则死区环节可以被完全消除。

图5 死区逆补偿原理Fig.5 Compensation principal for dead zone inverse
由图5可知,摩擦非线性造成的死区环节串联在加载电机模型的前向通道上,而死区逆补偿环节只能通过控制电压ud(s)对死区进行补偿,因此,本文通过在ETLS的控制电压ud(s)上施加偏移量来近似实现死区逆的补偿。根据加载系统控制电压与输出力矩之比1∶70,本文所设计的死区逆的实现方式是在给定输入信号的时候,在原来的输入信号上加入±0.05V的信号偏移量。具体实现过程如下。
本文将所设计的死区逆环节串联至控制电压的输出端,如图6所示,图中D1为本文设计的死区逆补偿环节,同时根据上文对死区逆补偿环节的描述,本文得出其数学表达式为
(11)
式中:ud(t)为死区逆的输入,u(t)为死区逆的输出。

图6 加入死区逆补偿环节的控制系统框图Fig.6 Control block with dead zone inverse compensation
2)死区逆补偿环节的仿真实验
仿真实验中,加载系统输入正弦力矩指令:幅值为5N·m,频率分别为0.5、2、5Hz,舵机系统的角度指令为0,得到不同频率下加入死区逆前后死区引起的跟踪误差增加值,如表2所示。
由表2可知,有本文设计的死区逆时,跟踪误差相比无死区逆时分别减小了95.9%、94.9%和82.3%,验证了死区逆补偿环节对由摩擦非线性引起的死区的抑制效果。
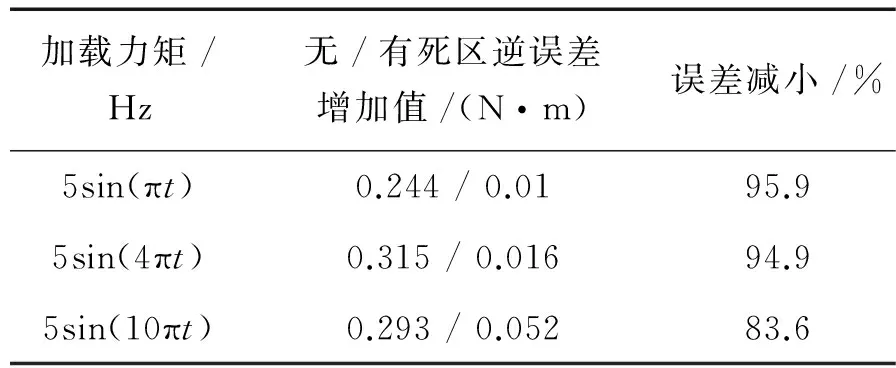
表2 不同频率下死区逆补偿效果指标
4 基于LMSE幅相控制算法改善ETLS加载性能的研究
针对ETLS力矩加载中存在的幅值衰减和相位滞后问题,文献[12]采用开闭环同一性原理提升了系统的频带宽度,但忽略了系统的力矩跟踪精度;文献[13]利用虚拟采样的方法拓展系统的频带宽度,但对采样频率本来就较高的系统效果有限。针对以上问题,本文基于LMSE算法设计幅相控制器,并针对幅相控制算法中存在的收敛速度和稳态精度无法同时满足的问题,提出改进的幅相控制算法,并通过仿真对比实验进行验证。
4.1 ETLS幅相控制算法补偿网络设计
1)ETLS幅相控制算法的补偿网络构建
幅相控制算法的原理是通过在系统输入信号的相位上提前α,使系统的输出信号在相位上也提前α,令输入信号u′(t)为[14]
u′(t)=Arsin(wt+α)=
Arw1sin(wt)+Arw2cos(wt)
(12)
基于幅相控制原理,本文构建了ETLS幅相控制算法的补偿网络,如图7所示,以期望指令构造出输出信号μ′作为ETLS的给定信号,并将ETLS的跟踪误差e作为幅相控制器的参考信号来实时调整算法的权值w1和w2。
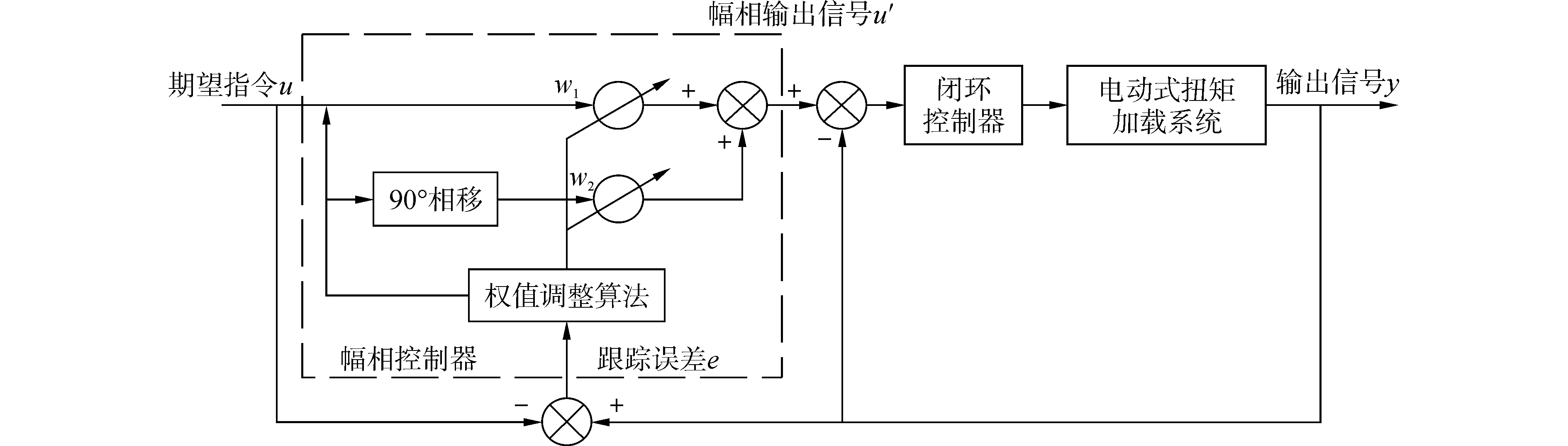
图7 幅相控制器补偿网络Fig.7 APC compensation network
2)权值调整算法
LMSE算法由于运算高效和各种运行条件下良好的性能而被广泛应用[15],因此,本文采用LMSE设计幅相控制器的权值调整算法。权值调整如下:
W(n+1)=W(n)+μu(n)e(n)
(13)
式中:W(n)为权值向量的当前值,μu(n)e(n)为权值向量当前值的调整值,μ为算法的调整步长,u(n)为滤波器的输入向量,e(n)为估计误差。
3)ETLS幅相控制器的设计
本文对式(12)、(13)进行了处理,将理论参数用实际系统中可直接获得的参数代替,处理之后的公式为
W1(n+1)=W1(n)+μsin(wn)e(n)
(14)
W2(n+1)=W2(n)+μcos(wn)e(n)
(15)
u′(n)=Arsin(wn+α)=
ArW1(n)sin(wn)+ArW2(n)cos(wn)
(16)
式中:sin(wn)、cos(wn)分别为系统的正弦期望指令和由正弦期望指令90°相移之后的余弦指令,μ为算法的调整步长,e(n)为力矩的偏差值,n为系统的采样时刻,w1(n)和w2(n)为权值。
4.2 基于固定步长LMSE的幅相控制算法仿真研究
本文首先通过仿真实验研究步长μ固定时LMSE幅相控制算法对ETLS幅值衰减和相位滞后的改善效果。
本文将幅相控制器加入到ETLS的力矩闭环中,得到基于LMSE幅相控制算法的ETLS仿真模型,如图8所示。
仿真实验中,步长μ分别取0.1、0.01、0.001、0.000 1、0.000 01,初始权值向量为W(0)=[2 0]T,加载系统输入正弦期望指令:幅值为5N·m,频率分别为2、5Hz。以步长μ为0.000 1,频率为5Hz时的力矩输出曲线为例进行分析,如图9所示。
由图9可知,在加入幅相控制算法之后,系统的幅值衰减为0.002%,相位滞后为1.8°,相比未加幅相控制算法下的幅值衰减和相位滞后数据4.07%和9.180°,幅值衰减和相位滞后分别降低了99.95%和80.39%,可见,加入幅相控制算法之后力矩输出曲线的幅值衰减和相位滞后均得到了很好的抑制。
本文将不同步长μ下幅相控制算法的力矩跟踪效果进行统计,以5Hz下的数据为例进行分析,如表3所示。
由表3可知,对本文研究的ETLS来说,小步长虽然保证了算法的稳定性和稳态精度,但是收敛速度不够,大步长收敛速度加快,但存在系统不稳定的风险,幅相控制算法中的收敛速度和稳态精度两个指标对步长μ来说是相互矛盾的。因此,当对收敛速度和稳态精度均有较高的要求时,有必要对基于固定步长LMSE的幅相控制算法进行改进。

图8 ETLS幅相控制仿真模型Fig.8 Simulation model of APC

图9 有无幅相控制输出对比曲线Fig.9 Comparative results with/without APC
Table3Comparativeperformanceofmagnitudeandfrequencycontrollerindifferentsteps
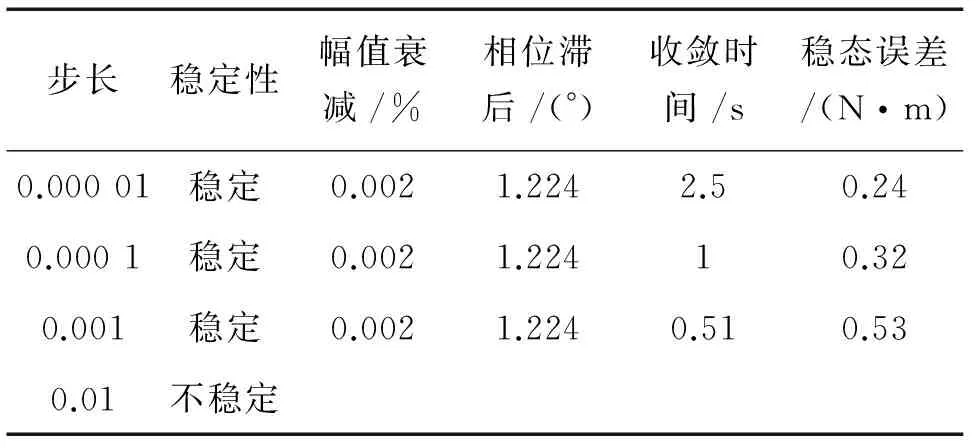
步长稳定性幅值衰减/%相位滞后/(°)收敛时间/s稳态误差/(N·m)0.00001稳定0.0021.2242.50.240.0001稳定0.0021.22410.320.001稳定0.0021.2240.510.530.01不稳定
4.3 基于变步长LMSE的幅相控制算法仿真研究
针对固定步长LMSE的幅相控制算法存在的缺点,本文基于变步长的基本思想[16],提出基于Sigmoid函数变步长LMSE的幅相控制算法进行改善,并通过仿真实验验证改进后算法的有效性。
本文以可变函数μ(n)代替固定步长μ,使其能够随着均方差的变化情况实时调整步长的大小,减小最终的稳态误差,从而同时满足幅相控制算法对收敛速度和稳态精度的要求。
本文将函数μ(n)代入固定步长的权值调整公式(14)、(15),可得变步长LMSE的权值调整函数为
W1(n+1)=W1(n)+μ(n)sin(wn)e(n)
(17)
W2(n+1)=W2(n)+μ(n)cos(wn)e(n)
(18)
本文采用Sigmoid函数作为LMSE算法的步长调整公式[16]:
μ(n)=β[1-exp(-α|e(n)|2)]
(19)
式中:β为限制步长最大值所设置的参数,|e(n)|2为误差绝对值的平方,α为控制函数形状所设置参数。
本文进行基于Sigmoid函数变步长LMSE和固定步长LMSE算法的对比实验,实验中,α分别取1、2、4,β分别取0.005、0.002、0.001,步长为0.001,初始权值向量为W(0)=[2 0]T,正弦期望指令为:幅值为5N·m,频率分别为2、5Hz。
表4为不同α和β时幅相控制算法在5Hz频率下的收敛时间和稳态误差统计,基于对收敛速度和稳态精度的综合考虑,本文确定变步长LMSE的幅相控制算法中α=2,β=0.002。
表4 不同α和β幅相控制算法收敛时间和稳态误差
Table4Convergenttimeandstableerrorindifferentαandβ
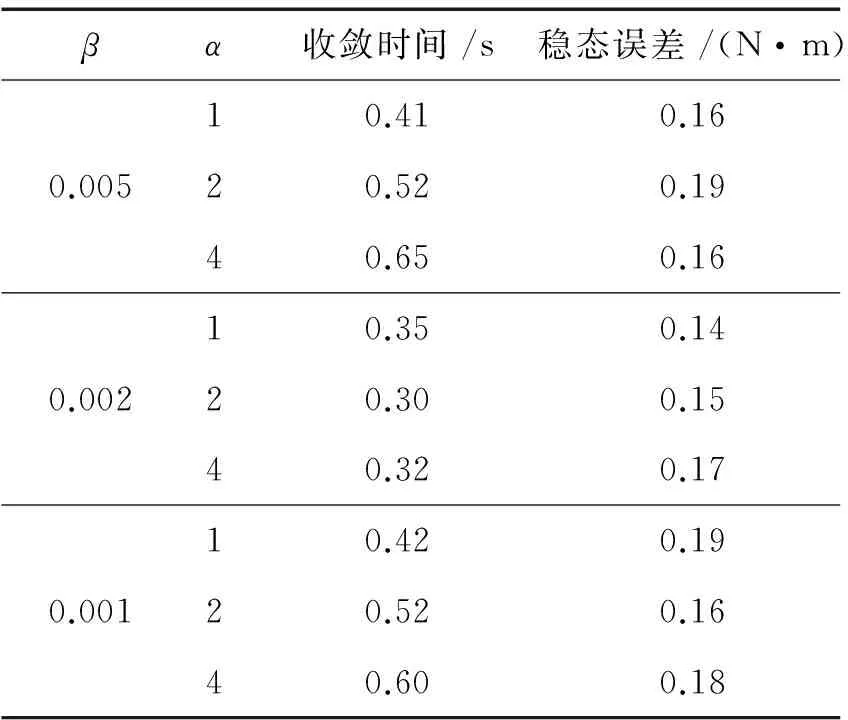
βα收敛时间/s稳态误差/(N·m)10.410.160.00520.520.1940.650.1610.350.140.00220.300.1540.320.1710.420.190.00120.520.1640.600.18
在确定α和β的取值后,本文以频率为5Hz下的力矩输出曲线和权值调整曲线为例对基于固定步长和变步长最小均方差的幅相控制算法的收敛速度进行对比分析,如图10所示。由图10可知,基于Sigmoid函数变步长LMSE幅相控制算法的收敛时间为0.3s,较基于固定步长LMSE幅相控制算法0.51s的收敛时间减小了0.21s,收敛速度提升了41.2%。同时由图11可知,基于Sigmoid函数变步长LMSE幅相控制算法的稳态误差为0.15N·m,较基于固定步长LMSE幅相控制算法0.53N·m的稳态误差提高了71.7%。

图10 固定步长和变步长权值调整曲线Fig.10 Results of weight with fixed step or varied step

图11 固定步长和变步长误差曲线Fig.11 Errors with fixed step or varied step
Table5Comparativeresultswithfixedsteporvariedstepindifferentfrequencies

加载指令/(N·m)收敛时间/s固定步长变步长最大误差/(N·m)固定步长变步长5sin(4πt)3.121.220.380.135sin(10πt)0.510.300.530.15
表5为各频率下固定步长与变步长算法性能参数对比,由表可知,不同频率下基于Sigmoid函数变步长LMSE幅相控制算法均具有较快的收敛速度和较高的稳态精度。
5 ETLS的实验研究
为了验证本文干扰力矩抑制及加载性能改善方法对ETLS加载性能的整体提升效果,本文在实验平台上进行动态加载性能实验。
在实验中,用联轴器使加载系统和舵机系统同轴连接,设置舵机系统的角度指令为正弦角度摆动,幅值为5°,频率分别为0.5Hz和5Hz,加载系统输入同频率的正弦力矩指令,幅值为5N·m,位置指令和力矩指令始终方向相反,得到各频率下单独闭环控制和加干扰力矩抑制及幅相控制算法下的动态加载力矩跟踪性能对比如图12所示。


图12 动态加载性能曲线对比Fig.12 Comparative results of dynamic loading performance
由图12可知,当频率分别为0.5Hz和5Hz时,加入干扰力矩抑制和幅相控制算法之后,幅值偏差分别为1.2%和6.4%,较单独闭环控制下分别减小了51.4%和89.9%,各频率下相位滞后分别为1.8°和0°,较单独闭环控制下分别减小了94.0%和100%,相位滞后基本消失,各频率下的跟踪误差幅值为0.31N·m和2.37N·m,较未加幅相控制算法分别减小了87.0%和64.9%,由此可见,加入干扰力矩抑制和幅相控制算法之后力矩跟踪曲线的幅值衰减和相位滞后得到了极大程度的抑制,跟踪精度得到了较大程度的改善,验证了本文所采用的干扰力矩抑制和加载性能改善方法对ETLS的加载性能的整体提升效果。
6 结论
本文以本课题组研制的ETLS为研究对象,重点研究了系统的干扰力矩抑制及加载性能改善方法,并进行了相关的仿真实验和平台实际实验。1)针对ETLS的存在的多余力矩和摩擦非线性干扰,本文提出采用基于舵机系统的输出角速度前馈控制和基于死区逆的补偿控制方法进行了抑制。ETLS实际实验表明:在0.5Hz和5Hz频率下,较单独闭环控制,加入干扰抑制和幅相控制算法的系统幅值偏差分别减小51.4%和89.9%。2)针对ETLS中存在幅值衰减和相位滞后的问题,本文提出基于Sigmoid函数变步长LMSE幅相控制算法进行抑制。ETLS实际实验表明:在0.5Hz和5Hz频率下,基于本文方法相位滞后基本消失,伴随着跟踪精度分别提高了87.0%和64.9%,ETLS加载性能有了明显的改善,验证了本文所提出的干扰力矩抑制和加载性能改善方法对ETLS的加载性能的整体提升效果。
[1]NAMY.QFTForceloopdesignfortheaerodynamicloadsimulator[J].IEEEtransactionsonaerospaceandelectronicsystems, 2001, 37(4): 1384-1392.
[2]AGHILIF,PIEDBOEUFJC.Contactdynamicsemulationforhardware-in-loopsimulationofrobotsinteractingwithenvironment[C]//Proceedingsofthe2002IEEEInternationalConferenceonRoboticsandAutomation.Washington,DC:IEEE, 2002: 523-529.
[3]王瑞, 陈松林. 电动负载模拟器输出力矩的影响因素分析[J]. 测试技术学报, 2011, 25(1): 47-51.WANGRui,CHENSonglin.Analysisofinfluencefactorsonoutputmomentofelectricallordsimulator[J].Journaloftestandmeasurementtechnology, 2011, 25(1): 47-51.
[4]方强, 马杰, 毕运波, 等. 基于扰动观测器的电动负载模拟器控制系统设计[J]. 浙江大学学报: 工学版, 2009, 43(11): 1958-1964.FANGQiang,MAJie,BIYunbo,etal.Disturbanceobserverbasedcontrollerdesignforelectricdynamicloadsimulator[J].JournalofZhejianguniversity:engineeringscience, 2009, 43(11): 1958-1964.
[5]焦宗夏, 华清, 王晓东, 等. 电液负载模拟器的复合控制[J]. 机械工程学报, 2002, 38(12): 34-38.JIAOZongxia,HUAQing,WANGXiaodong,etal.Hybridcontrolontheelectro-hydraulicloadsimulator[J].Chinesejournalofmechanicalengineering, 2002, 38(12): 34-38.
[6]COELINGHHJ,SCHRIJVERE,DEVRIESTJA,etal.Designofdisturbanceobserversforthecompensationoflow-frequencydisturbances[C]//Proceedingsofthe5thInternationalConferenceonMotionandVibrationControl(MOVIC).Sydney,Australia, 2000: 75-80.
[7]BETINF,SIVERTA,NAHIDB,etal.PositionControlofanInductionmachineUsingVariableStructureControl[J].IEEE/ASMEtransactionsonmechatronics, 2006, 11(3): 358-361.
[8]TOMIZUKAM.OnthecompensationofFrictionforcesinprecisionmotioncontrol[C]//ProceedingsofAsia-PacificWorkshoponAdvancesinMotionControl.Singapore:IEEE, 1993: 69-74.
[9]刘立刚. 电动式扭矩加载系统研制及其控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2013: 13-14.LIULigang.Developmentofelectricaltorqueloadingsystemandresearchonitscontroltechnology[D].Harbin:HarbinEngineeringUniversity, 2013: 13-14.
[10]朱耀麟, 杨志海, 陈曦豪. 模型降阶方法研究[J]. 微计算机信号, 2011, 27(5): 22-25.ZHUYaolin,YANGZhihai,CHENXihao.Investigationonthemethodsofmodelreduction[J].Microcomputerinformation, 2011, 27(5): 22-25.
[11]GRUNDELIUSM,ANGELID.Adaptivecontrolofsystemswithbacklashactingontheinput[C]//Proceedingsofthe35thIEEEConferenceonDecisionandcontrol.Kobe,Japan:IEEE, 1996: 4689-4694.
[12]刘长年, 王树胜. 负载模拟器的优化设计[C]//中国力学学会流体控制工程专业委员会流体控制工程与机器人第八届学术会议论文集. 洛阳: 中国力学学会, 1993: 214-217.
[13]冯兴强. 提高采样控制系统带宽的方法研究[J]. 光电工程, 2003, 30(4): 20-23.FENGXingqiang.Amethodforimprovingthebandwidthofasamplingcontrolsystem[J].Opto-electronicengineering, 2003, 30(4): 20-23.
[14]姚建均. 电液伺服振动台加速度谐波抑制研究[D]. 哈尔滨: 哈尔滨工业大学, 2007: 3-4.YAOJianjun.Researchonaccelerationharmoniccancellationofelectro-hydraulicservoshakingtable[D].Harbin:HarbinInstituteofTechnology, 2007: 3-4.
[15]HAYKINS. 自适应滤波器原理[M]. 郑宝玉, 译. 北京: 电子工业出版社, 2002: 70-72.
[16]罗小东, 贾振红, 王强. 一种新的变步长LMS自适应滤波算法[J]. 电子学报, 2006, 34(6): 1123-1126.LUOXiaodong,JIAZhenhong,WANGQiang.AnewvariablestepsizeLMSadaptivefilteringalgorithm[J].Actaelectronicasinica, 2006, 34(6): 1123-1126.
Disturbancetorquesuppressionandimproveddynamicloadingperformanceforelectrictorqueloadingsimulator
ZHAOWende,TANGQi,ZHANGMingjun
(SchoolofMechanicalandElectricalEngineering,HarbinEngineeringUniversity,Harbin150001,China)
Inthispaper,anexperimentalprototypeofelectrictorqueloadingsimulator(ETLS)isdevelopedandtheintegratedmathematicmodelisbuiltforETLSalongwithfrictionnonlinearityofloadingsystem.Basedontheinvestigationoftheproblemofsurplustorquecausedbypositiondisturbanceoftheloadedsystem,thispaperdesignsafeedforwardcompensationcontrolmethodbasedontheoutputangularvelocityoftheloadedsystem.Acompensationmethodisthendevelopedonthebasisofdead-inversebyconsideringfrictionnonlinearityoftheloadedsystem.Inaddition,withrespecttotheproblemofamplitudeattenuationandphaselagofETLS,thispaperadoptsanamplitudeandphasecontrol(APC)algorithmbasedontheleastmeansquareerror(LMSE)techniquetoimprovetheloadingperformanceofETLS.TheAPCalgorithmbasedonthesigmoidfunctionadaptive-stepLMSEalgorithmissubsequentlyproposed,withtheaimofreducingthecontradictionofsteprequiredbytheconvergencerateandsteadyprecision,therebyimprovingtheperformanceoftheentirealgorithm.Finally,aseriesofsimulationsandexperimentsareconducted,andresultsshowthatthedevelopeddisturbancetorquesuppressionandloadingperformanceimprovementmethodareeffective.Specifically,inconditionswith0.5and5Hzfrequencies,thetrackingprecisionisimprovedby87.0%and64.9%,respectively,byusingtheproposedmethod.
electricaltorqueloadingsystem;surplusmomentofforce;frictiondead-zone;amplitudeandphasecontrol;feedforwardcontrol;leastmeansquareerror
2015-09-22.
日期:2016-09-28.
国防基础科研项目(B2420133003).
赵文德(1964-), 男, 教授,硕士生导师.
赵文德,E-mail:zhaowende@hrbeu.edu.cn.
10.11990/jheu.201509063
TH
A
赵文德, 唐琪, 张铭钧.ETLS干扰力矩抑制及加载性能改善方法[J]. 哈尔滨工程大学学报, 2016, 37(11): 1586-1593.ZHAOWende,TANGQi,ZHANGMingjun.Disturbancetorquesuppressionandimproveddynamicloadingperformanceforelectrictorqueloadingsimulator[J].JournalofHarbinEngineeringUniversity, 2016, 37(11): 1586-1593.
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160928.1419.052.html
