双介质摄影测量的折射改正方法
2016-12-12曹彬才邱振戈朱述龙曹芳
曹彬才, 邱振戈, 朱述龙, 曹芳
(1.上海海洋大学 海洋测绘应用研究中心,上海 201306;2.解放军信息工程大学 导航与空天目标工程学院,河南 郑州 450000;3.宜宾职业技术学院 电子信息与控制工程系,四川 宜宾 644003)
双介质摄影测量的折射改正方法
曹彬才1,2, 邱振戈1, 朱述龙2, 曹芳3
(1.上海海洋大学 海洋测绘应用研究中心,上海 201306;2.解放军信息工程大学 导航与空天目标工程学院,河南 郑州 450000;3.宜宾职业技术学院 电子信息与控制工程系,四川 宜宾 644003)
为了提高利用光学立体像对进行水下目标三维定位的精度,本文基于光线在空气和水体两种不同介质中的传播规律建立了光线折射改正模型。从航迹方向、航迹垂直平分线方向和普通情况三种角度讨论双介质摄影测量的几何关系,定量分析光线不严格相交造成的平面误差,并推导双介质折射改正公式。利用近景摄影条件下的立体像对验证折射改正方法的正确性,结果表明在实验室条件下,双介质摄影测量的相对测深精度优于3.5%。
双介质摄影测量;水下地形;折射改正;几何关系;直接线性变换模型;精度
双介质摄影测量是利用物方空间和像方空间处在两种不同介质中拍摄的图像确定被摄目标几何特性的技术[1-2],从20世纪80年代起开始得到较多关注。王有年等研究了双介质摄影测量的一般构象关系和基本公式[3-4],单杰阐述了双介质相对定向的流程[5],杨新宇利用双介质摄影测量监测隧道模型地层移动[6]。进入21世纪后,由于多光谱水深反演理论的发展和双波段测深Lidar技术的出现,很少研究者关注双介质摄影测量,许多新算法、新技术都没有引入。钦桂勤等研究了水下双介质共线理论,没有对水上双介质做进一步讨论[7],刘善磊等研究了POS数据在双介质水下地形测量的应用,但都是基于模拟数据开展实验[8],周高伟等利用海岛无人机影像开展了航空双介质摄影测量试验与分析[9],但没有开展深入的精度分析。
虽然双介质摄影水下地形测量的探测深度有限,探测精度相对较低,但其空间分辨率高,相对于其他测量技术,双介质测量对描述海底地貌特征、建立三维海底景观模型具有突出优势[10]。由于光线在不同介质分界面产生折射,因此利用立体像对进行浅水区地形测绘时首先要进行折射改正。理论上,当水下点位于两摄站垂直平分面时,观测点和真实点的平面坐标才相等,其他的情况都需要近似处理[11]。虽然现有的折射改正方法取得了不错的效果[12-15],但缺乏对不同情况下近似处理误差大小的定量分析。本文通过分析不同光线入射情况下近似处理造成的误差大小,提出简单实用的折射改正模型,并利用实验室实测数据验证该模型的有效性。
1 双介质摄影测量近似处理与误差分析
根据光线传播原理,如果不考虑表面反射,高程值受水深效应的影响,要明显高于实际位置。水体折射改正时需要考虑折射率、入射面高程及法线方向三个因素。理想状态下,认为在小范围内水质均一,水体折射率为常数,水面为平面。如图1所示,为了对折射改正进行定量分析,本文将立体像对重叠区分为航迹方向、航迹垂直平分线及其他位置3种情况展开讨论。
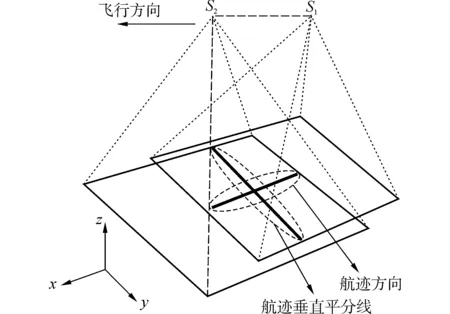
图1 立体像对重叠区中3种几何位置关系Fig.1 Three different geometric relationships in the overlap area of a stereopair
光线从一种介质进入另一种介质是产生的折射现象,可以用斯涅尔折射定律概括,即
(1)
式中:r1、r2分别为左、右摄站到水下点的入射角;i1、i2为对应的折射角;n为水的折射率,通常取1.340,该值在较大的温度、盐度变化范围内误差小于1%[16]。
1.1 航迹方向
如图2所示,同名折射点P1、P2的连线与航迹方向平行,S1、S2表示立体像对的摄影位置,A表示目标点的观察位置。假设A不在S1、S2的垂直平分面上,即D1≠D2,A点与S1、S2的连线确定了入射角r1、r2,由式(1)可以计算出射角i1、i2。在hC高程面处,xC1=hCtan i1,xC2=hCtan i2,P1PC1和P2PC2的交点即为目标点的真实位置P。

图2 航迹方向双介质折射几何关系Fig.2 Geometry of two-medium photogrammetry in the in-track case
由于折射点P1、P2位于航迹方向,故YP=YA。设P1P2的距离为k,则
k=(tan r1+tan r2)hA=(tan i1+tan i2)h
(2)
(3)
由几何关系和折射定律可得
(4)
(5)
(6)
(7)
真实位置的X大小关系为
XP=XP1+htan i1=XA-hAtan r1+htan i1
(8)
将式(3)代入式(8),可得
(9)
式(9)表示了航迹方向目标点真实位置和观测位置在平面上的定量关系,代入相关参数可以定量计算水平偏差。图3给出了航高1 500 m,基线长度500 m条件下航线方向的不同点的观测位置与真实位置的水平方向差异,水深值显示了1、15、30 m三种情况。30 m是可见光影像能观测到海底特征的极限深度,对应的最大水平偏差仅为0.04 m。由于海洋测绘的误差容忍度大,因此目标处于航迹方向时由于折射造成的水平偏差可以忽略。
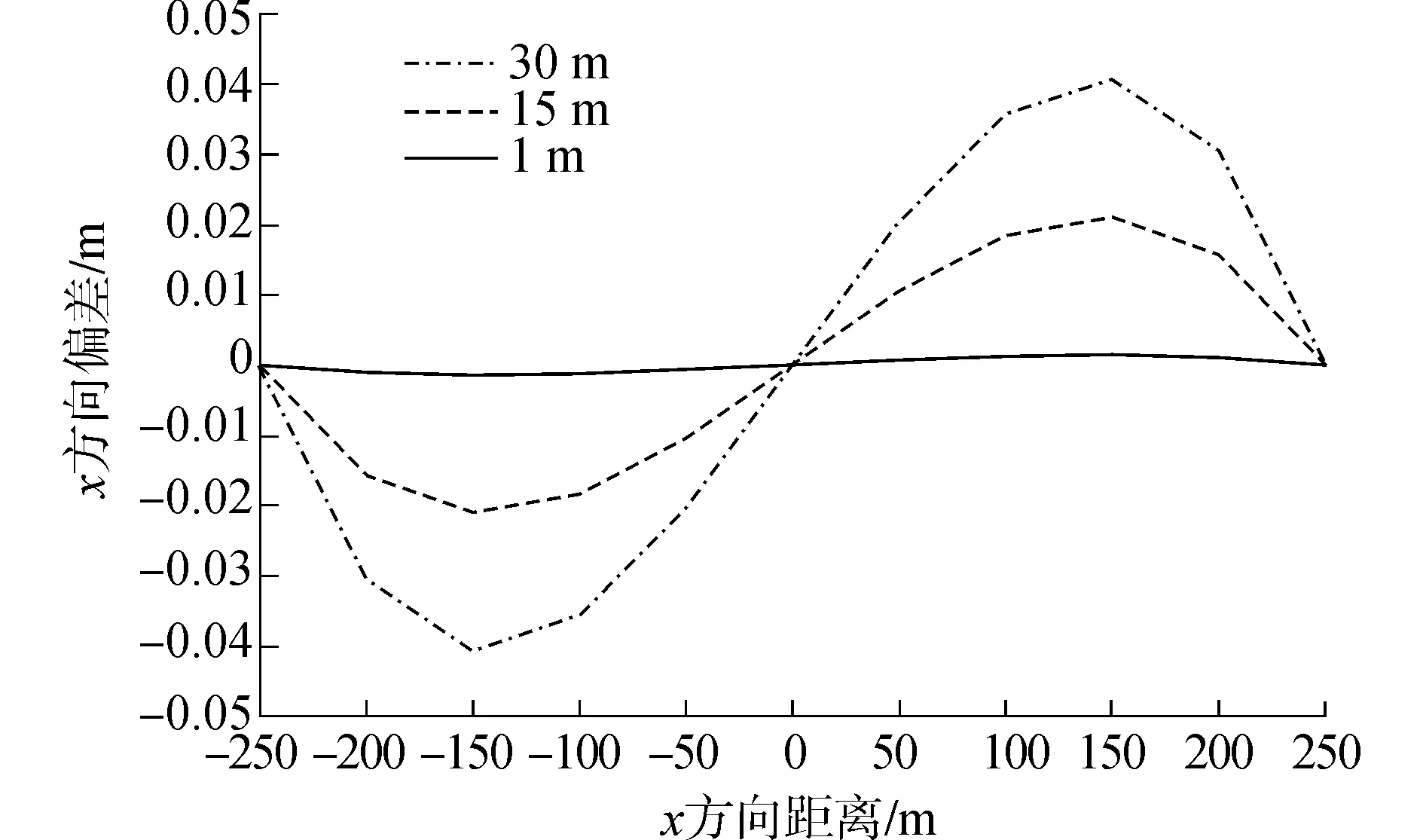
图3 航迹方向真实位置和观测位置的x误差Fig.3 Difference in x values of observed and true positions for the in-track case
1.2 航迹垂直平分线方向
如图4所示,当同名折射点P1、P2位于图1中航迹垂直平分线方向时,θ1=θ2,D1=D2,因此i1=i2,r1=r2,直线L1、L2必然交于一点,即XA=XP、YA=YP。因此:
(10)
将式(4)~(7)代入,即可解得真实水深值h。

图4 航迹垂直平分线方向几何关系图Fig.4 Geometry of two-medium photogrammetry in the perpendicular bisector of the in-track direction
1.3 其他位置
上面分析了航迹方向和航迹垂直平分线方向两种特殊情况,得出如下结论:1)在航迹方向,当观测点A不在航迹中点时,入射光线不相交,理论上无解,入射角度差异会造成观测点和真实点之间存在水平位置差,但差异值可以忽略;2)在航迹垂直平分线方向,入射光线严格交会于一点,可得到精确解。
k=(tan r1cos θ1+tan r2cos θ2)hA=
(tan i1cos θ1+tan i2cos θ2)h
(11)
因此:
(12)
其中
(13)
将式(4)~(7)和(13)代入式(12),可以解得真实水深h。
2 双介质水深测量处理流程
运用立体像对进行双介质水深测量,主要包含以下流程:
1)立体像对摄影及控制参数的获取。若采用量测相机需要知道内、外方位元素,若采用非量测相机,可以利用地面布设的控制点求解对应的内、外方位元素。对高分辨率遥感卫星影像而言,往往不提供严格成像模型和姿态、轨道参数,此时可使用RPC参数和元数据中的地底角参数完成立体定位和折射改正。
2)影像质量分析及改善。双介质摄影测量在理想情形时的处理较为简单,但实际应用中面临诸多难点,如波浪起伏、太阳耀斑、水体浑浊等。水下物体能见度高、水面平缓时有利于双介质摄影水深测量。应对立体像对进行影像增强、耀斑消除[17]等预处理,改善影像质量。
3)同名点匹配及三维坐标求解。影像预处理能改善浅水区纹理,提升匹配的可靠性;近景非量测相机可采用直接线性变换(DLT)模型求解立体坐标,航空影像使用共线方程模型,卫星影像则利用RPC立体定位模型获得匹配点的可视坐标。
4)水陆分离。立体像对的匹配点包含陆地和水下两部分,利用同时刻拍摄的红外影像,采用监督分类、边缘检测等方法实现水陆分离。
那段时间,日子是灰色的。钱海燕觉得自己的整个世界都坍塌了。婚后这一年,周启明将她宠得像个孩子,现在他倒下了,她只能扛起所有的事。
5)折射改正。对水下点,采用式(4)~(7)、(13)和(12)进行折射改正,获得水下DEM。
6)精度评定。可对比实测水深数据进行绝对精度评定,也可对比水下坡向、坡度等进行相对精度评定。
3 折射改正方法的实验验证
如图5所示,利用实验室实测数据验证折射改正方法的正确性。人工模型使用内部鹅卵石填充、外部石膏布固定的方法制作,保证模型具备刚性和丰富的表面纹理。整个拍摄在水动力学实验室中进行,具备便利的水源、光照条件。将人工模型置于玻璃缸内,玻璃缸上表面放置一块3 mm厚的有机玻璃板,该厚度条件下有机玻璃板造成的光线折射可以忽略,视为理想的双介质实验条件。在有机玻璃板上布设11个平高控制点,人工模型上布设16个控制点,所有控制点采用两台经纬仪交会观测得到准确坐标,精度优于1 mm。摄影相机采用非量测类的Cannon 7D数码相机,分别拍摄获取有水、无水情况下的立体像对。

图5 双介质水深测量实验室验证示意图Fig.5 Sketch map of laboratorial two-medium test
3.1 成像模型的构建
由于非量测相机畸变差较大,无定向装置,内方位元素不稳定,因此不适宜采用共线方程模型。DLT模型直接建立像方坐标与物方空间坐标的对应关系,适合于非量测相机和近景摄影测量[18]。包含非线性物镜畸变的DLT模型为
(14)
式中:(x,y)、(X,Y,Z)分别表示控制点像方、物方坐标;l1,…,l11为模型l系数;(Δx,Δy)表示物镜畸变差,Δx=(x-x0)kr2,Δy=(y-y0)kr2,k表示物镜畸变参数,r表示向径。
由于需要分别重建有水、无水情况下人工模型三维信息,而有水时光线的折射导致水下点与水上点并不能用同一个成像模型描述,因此仅使用有机玻璃板上的平高点作控制,人工模型上的点全部用作检查。首先使用11个平高控制点分别求解立体像对的DLT模型l参数,再求解对应摄站的外方位线元素,最后利用检查点评估立体模型的定位精度。如表1所示,本文求解的DLT模型在检查点上的平面中误差达0.85 mm,高程中误差为0.47 mm,表明了DLT模型参数和立体构建方法的正确性。
表1 DLT模型在检查点上的定位残差
Table 1 Check point’s orientation residual error based on DLT model mm

序号ΔxΔyΔz序号ΔxΔyΔz10.9680.8180.57390.7520.0470.91820.8940.8720.200100.9180.8010.25130.3350.1520.314110.8010.5540.34640.6160.6980.304120.3420.7321.12150.6600.2370.227130.8620.3350.35560.4640.0820.623140.1240.8120.24570.9680.5410.606150.0120.5430.15480.3620.2730.354160.5320.8620.886
3.2 DEM的获取与双介质折射改正
对无水、有水情况的立体像对都进行影像增强、同名点匹配和RANSAC粗差剔除,得到大量可靠的人工模型表面的同名点,再使用DLT立体交会模型计算同名点三维坐标,插值可分别获得无水参考DEM和有水未折射改正的观测DEM。
图6给出了DEM的获取与双介质折射改正,对比图6(a)、(b)可以发现,未进行折射改正的观测DEM虽然在整体形状上类似于无水参考DEM,但在高程Z值上明显高于参考DEM,即折射抬升效应。经过折射改正后的DEM在高程Z值上与参考DEM更加接近,基本消除了折射高程差异。同时由图6(d)易知,水深改正量与目标点的观测深度直接相关,观测深度越大,折射改正量越大,这与式(12)中的h与hA成正比的关系相符合。
为了更直观地表示折射前后DEM的对应关系,将所有点对应的折射改正前后的高程值用散点图表示,结果如图7所示。由图可知,折射改正之前,观测DEM的值与参考单介质DEM的值对应性较差,而折射改正后DEM和参考DEM的拟合直线的斜率约等于1,表示改正后DEM上的某点高程值与对应位置参考DEM的高程值很接近,从而说明本文折射改正方法的正确性。
从定量角度,分别采用均值(ME)、绝对值均值(MUE)和标准差(SDE)三个参数进行评价,结果如表2所示。折射改正前后DEM高程标准差分别为449.35 mm和5.65 mm,表示折射改正后比折射改正前精度提升约98.7%((449.35-5.65)/449.35=98.7%)。此外,计算结果表明实验室条件下的双介质摄影水深测量精度优于平均水深的3.5%(3.5%>(5.65/180.0))。
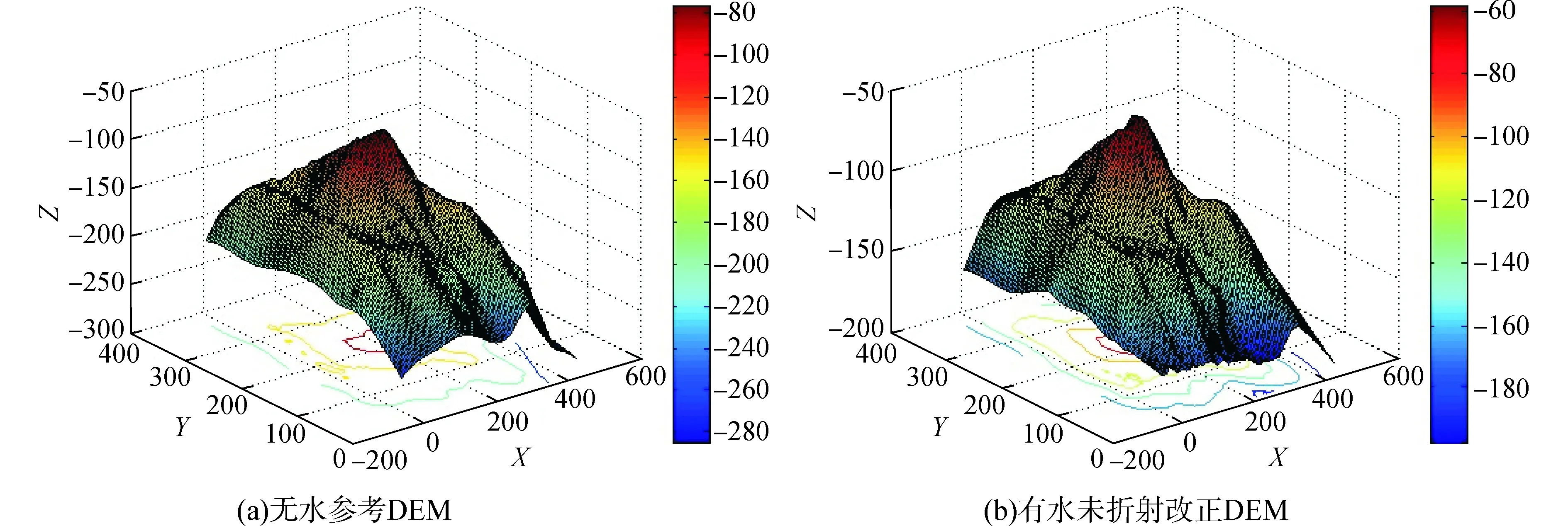

图6 DEM的获取与双介质折射改正Fig.6 DEM acquired form laboratory stereopair and the refraction correction

图7 折射改正前后DEM对应关系Fig.7 Relations of pre and after refraction corrected DEM
Table 2 Quantitative accuracy assessment of raw DEM and refraction corrected DEM mm
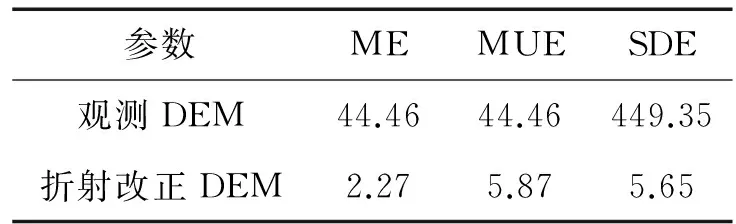
参数MEMUESDE观测DEM44.4644.46449.35折射改正DEM2.275.875.65
4 结论
通过本文的理论分析和实验讨论,可得出如下结论:
1)双介质摄影测量中,同名点折射光线并不一定严格交于一点,但由此造成的观察位置和真实位置的水平差异可以忽略,即所有目标点都能当作光线相交的情形来近似处理。
2)如果不进行折射改正,直接获得的水下DEM会相对抬升,造成较大误差。
3)本文的双介质折射改正方法在实验室理想条件下可以获得优于0.035倍平均水深的测量精度,表明了双介质摄影水深测量的可行性。
需要指出,本文实验方法存在以下不足:近景摄影测量的影像分辨率高,但控制点测量精度不足以达到子像素级,这对模型精度造成一定影响。后续工作需要利用更多的实验数据,对波浪、耀斑等复杂条件进行理论分析和算法研究,进一步探索双介质摄影测量的实际精度和业务化运行能力。
[1]王之卓. 摄影测量学原理[M]. 北京: 测绘出版社, 1990: 340-345. WANG Zhizhuo. Principles of photogrammetry[M]. Beijing: Surveying and Mapping Press, 1990: 340-345.
[2]默顿斯 L E. 水中摄影学[M]. 张闻迪, 关福民, 杨作昇, 译. 北京: 科学出版社, 1979: 107-124. MERTENS L E. In-water photography[M]. ZHANG Wendi, GUAN Fumin, YANG Zuosheng, Trans. Beijing: Science Press, 1979: 107-124.
[3]王有年, 韩玲, 王云. 水下近景摄影测量试验研究[J]. 测绘学报, 1988, 17(3): 217-224. WANG Younian, HAN Ling, WANG Yun. Experimental research of underwater close-range photogrammetry[J]. Acta geodetica et cartographica sinica, 1988, 17(3): 217-224.
[4]常本义. 双介质摄影测量基本公式[J]. 测绘学报, 1991, 20(4): 288-294. CHANG Benyi. Basic formulas of two-media photogrammetry[J]. Acta geodaetica et cartographica sinica, 1991, 20(4): 288-294.
[5]单杰. 双介质摄影测量的相对定向[J]. 解放军测绘学院学报, 1993(3): 38-44. SHAN Jie. Relative orientation for two-media photogrammetry[J]. Journal of institute of surveying and mapping, 1993(3): 38-44.
[6]杨新宇. 双介质近景摄影测量用于隧道模型地层移动观测[J]. 测绘学报, 1987, 16(4): 261-270. YANG Xinyu. Two-media close-range photogrammetric measu-rement of sandy soil movements aroundtunnel modelS[J]. Acta geodaetica et cartographica sinica, 1987, 16(4): 261-270.
[7]钦桂勤, 黄桂平, 张永生. 双介质摄影测量共线理论研究[J]. 测绘学报, 2011, 40(3): 351-358. QIN Guiqin, HUANG Guiping, ZHANG Yongsheng. The research of collinearity theory for two-media photogrammetry[J]. Acta geodaetica et cartographica sinica, 2011, 40(3): 351-358.
[8]刘善磊, 赵银娣, 李英成, 等. POS数据用于双介质水下地形摄影测量的研究[J]. 测绘科学, 2011, 36(6): 42-45. LIU Shanlei, ZHAO Yindi, LI Yingcheng, et al. Analysis at underwater topographic two-media photogrammetry with POS data[J]. Science of surveying and mapping, 2011, 36(6): 42-45.
[9]周高伟, 李英成, 任延旭, 等. 低空无人机双介质水下礁盘深度测量试验与分析[J]. 测绘学报, 2015, 44(5): 548-554, 562. ZHOU Gaowei, LI Yingcheng, REN Yanxu, et al. Research of two-media underwater reefs depth measurement experiment based on low-altitude UAV[J]. Acta geodaetica et cartographica sinica, 2015, 44(5): 548-554, 562.
[10]党亚民, 程鹏飞, 章传银, 等. 海岛礁测绘技术与方法[M]. 北京: 测绘出版社, 2012: 277-278. DANG Yamin, CHENG Pengfei, ZHANG Chuanyin, et al. Surveying and mapping technology of island and reef[M]. Beijing: Surveying and Mapping Press, 2012: 277-278.
[11]MURASE T, TANAKA M, TANI T, et al. A photogrammetric correction procedure for light refraction effects at a two-medium boundary[J]. Photogrammetric engineering & remote sensing, 2008, 74(9): 1129-1136.
[12]BUTLER J B, LANE S, CHANDLER J, et al. Through-water close range digital photogrammetry in flume and field environments[J]. The photogrammetric record, 2002, 17(99): 419-439.
[13]KANG Lai, YANG Zheng, WEI Yingmei, et al. Theory of multi-level refractive geometry[J]. Electronics letters, 2015, 51(9): 688-690.
[14]WESTAWAY R M, LANE S N, HICKS D M. The development of an automated correction procedure for digital photogrammetry for the study of wide, shallow, gravel-bed rivers[J]. Earth surface processes and landforms, 2000, 25(2): 209-226.
[15]TELEM G, FILIN S. Photogrammetric modeling of the relative orientation in underwater environments[J]. ISPRS journal of photogrammetry and remote sensing, 2013, 86: 150-156.
[16]JERLOV N G. Marine optics[M]. Amsterdam: Elsevier Publishing Company, 1976: 231.
[17]KAY S, HEDLEY J D, LAVENDER S. Sun glint correction of high and low spatial resolution images of aquatic scenes: a review of methods for visible and near-infrared wavelengths[J]. Remote sensing, 2009, 1(4): 697-730.
[18]ABDEL-AZIZ Y I, KARARA H M, HAUCK M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry[J]. Photogrammetric engineering & remote sensing, 2015, 81(2): 103-107.
Refraction correction procedure of two-medium photogrammetry
CAO Bincai1,2, QIU Zhen'ge1, ZHU Shulong2, CAO Fang3
(1. Research Center for Ocean Mapping and Applications, Shanghai Ocean University, Shanghai 201306, China; 2. College of Navigation and Aerospace Engineering, PLA Information Engineering University, Zhengzhou 450000, China; 3. Department of Electronic Information and Control Engineering, Yibin Vocational and Technical College, Yibin 644003, China)
In this study, we develop a ray refraction correction model based on the propagation law of ray in water and air. Moreover, here we discuss the geometric relationships of two-medium photogrammetry from three different aspects including track direction, track perpendicular bisector direction, and general situation to improve the accuracy of positioning submerged targets by utilizing optical stereo pairs. The plane errors caused by different incident angles are quantitatively analyzed. Furthermore, the refraction correction equation is derived. The close-range stereo pair is used to verify the correctness and effectiveness of the proposed refraction correction procedure. The experimental results show that the relative bathymetry accuracy of the two-medium photogrammetry is better than 3.5% under laboratorial conditions.
two-medium photogrammetry; underwater topography; refraction correction; geometric relation; direct linear transformation model; accuracy
2015-09-13.
日期:2016-05-27.
国家自然科学基金项目(41101396);上海市科学技术委员会科研计划项目(14590502200).
曹彬才(1987-), 男, 博士研究生; 邱振戈(1966-), 男, 教授,博士生导师.
曹彬才,E-mail: cbcontheway@163.com.
10.11990/jheu.201509041
P237
A
1006-7043(2016) 11-1479-06
曹彬才, 邱振戈, 朱述龙, 等. 双介质摄影测量的折射改正方法[J]. 哈尔滨工程大学学报, 2016, 37(11): 1479-1484. CAO Bincai, QIU Zhenge, ZHU Shulong, et al. Refraction correction procedure of two-medium photogrammetry[J]. Journal of Harbin Engineering University, 2016, 37(11): 1479-1484..
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160527.1354.002.html
