深海环境模拟实验装置及压力动态控制技术
2016-12-12张强张雷励张铭钧
张强,张雷励,张铭钧
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
深海环境模拟实验装置及压力动态控制技术
张强,张雷励,张铭钧
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
为了模拟深海环境压力,研制了一套模拟压力可以大范围连续变化的实验装置,并研究了其压力动态控制技术。提出了在液压回路中串联液压缸的方法解决电液比例阀使用水介质的局限性问题;针对压力动态控制模块固有滞后特性的问题,提出了相位补偿算法予以解决;针对实验试件爆破时造成装置内压力突降而无法快速恢复到目标值的问题,提出了基于气体式蓄能器的压力快速补偿方法予以解决。通过对模拟实验装置进行相关实验研究,验证了本文研究的压力动态控制技术、压力快速补偿技术的可行性和有效性。
深海环境;串联液压缸;油水转换;压力动态控制模块;相位补偿算法;压力快速补偿方法;液压系统
随着海洋开发进程的加快,水下设备的研发越来越受到重视[1],基于试压容器的深海环境模拟实验装置可在实验室条件下模拟深海环境,为研制水下设备提供便捷、可靠的陆地实验平台,对缩短设备研究周期、降低研制成本、减少海试造成意外损失等具有重要的研究意义和实际价值[2]。
“红色”在中国文化中象征着喜庆、热烈,但在西方文化中则更多地与暴力、流血联系在一起。在翻译时,霍克斯采用了源语文化服从目的语文化的做法,用绿色代替了红色,将“怡红公子”译为“Green Boy”,将“怡红院”译为了“House of Green Delights”。虽然这样做便于目的语读者理解,但却没能将源语文化传递向目的语文化中,没能达到文化交流的目的。
本文针对水下设备工作在不同水深的需求,研制了一套模拟压力可在大范围连续变化的深海环境模拟实验装置。针对系统固有惯性以及闭环系统延迟特性的影响问题,提出一种对目标函数进行相位补偿的方法,以改善系统压力动态控制性能;针对模拟实验装置内压力突降的问题,研究了一种压力快速补偿方法。通过对模拟实验装置进行相关实验,验证本文所提出方法的可行性与有效性。
1 深海环境模拟实验装置总体方案
1.1 深海环境模拟实验装置组成分析
深海环境模拟实验装置需要能够模拟水下设备做复杂升沉运动所对应承压环境的变化,同时当舱体类实验试件爆破造成系统压力突降时应使系统压力快速恢复。针对这些要求,本文研制了一套深海环境模拟实验装置,其组成如图1所示。本实验装置的基本工作原理为:控制器根据目标压力曲线,控制压力动态控制模块,升高试压容器内压力,当试压容器内某个试验舱爆炸时,试压容器内压力陡降,此时压力快速补偿模块启动,使其快速升压,达到接近爆炸前的压力。
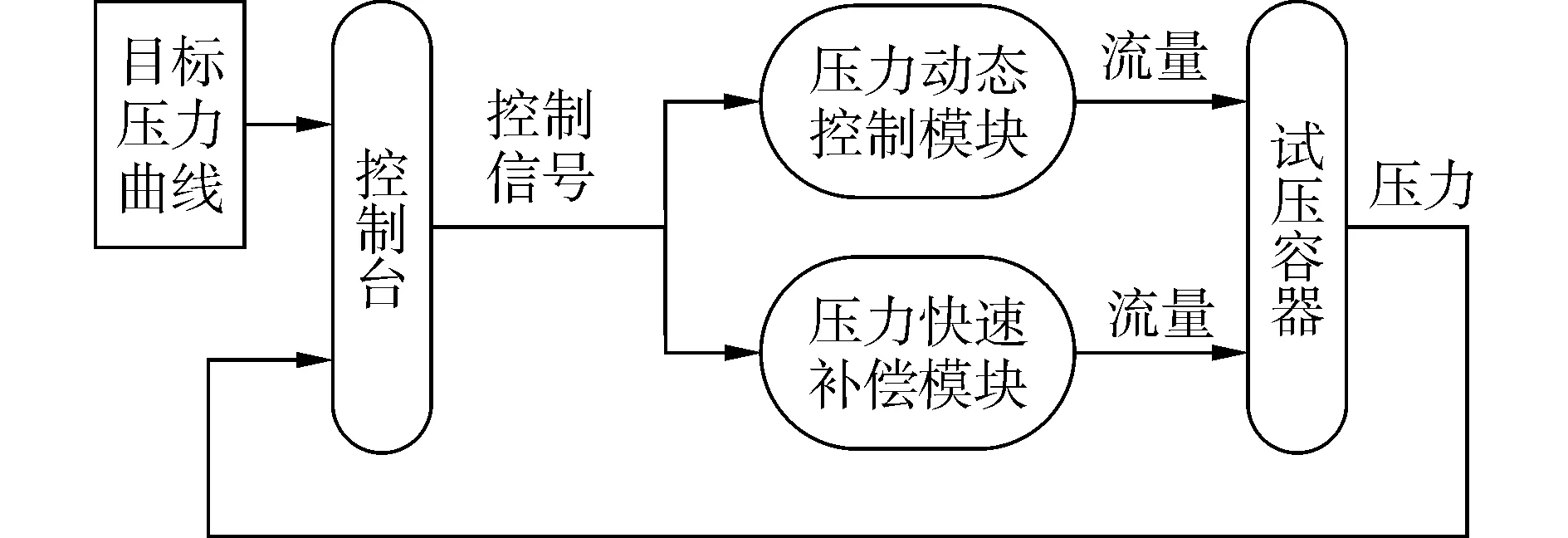
图1 深海环境模拟实验装置组成图Fig.1 The composition diagram of deep sea environment simulation experiment device
1.2 深海环境模拟实验装置压力动态控制模块
压力动态控制模块的作用是模拟不同水深的外部环境压力。文献[3]研制了一套压力控制模块,该模块的压力控制精度较高,但由于受电机、减速器和丝杠等启动惯性的影响,其频响速度较慢。文献[4]基于电液比例阀设计的压力动态控制方案,其仿真结果能满足设计指标,但没有考虑深海环境模拟实验装置通常使用水介质,易造成电液比例阀内部锈蚀,从而影响其控制性能和使用寿命。
针对上述问题,本文研究并设计了压力动态控制方案。针对文献[3]中电机驱动方式频响速度慢的问题,本文改进为液压驱动方式;针对文献[4]中电液比例阀不适于水介质的问题,本文提出在电液比例阀出油口和试压容器之间串联一只液压缸,通过其活塞阻隔作用实现油水转换的解决方案。本文设计的压力动态控制模块工作原理如图2所示。

图2 压力动态控制模块的工作原理图Fig.2 The working schematic diagram of pressure dynamic control module
由图8可知,跟踪绝对误差小于±0.02 MPa(对应水深±2 m),能保持目标曲线特征,反映出压力动态控制模块可较好地跟踪0.01 MPa/s的斜坡函数。
本文基于PID控制算法进行动态压力补偿控制,具体如下:
图5中,输入量单位阶跃信号Step表示为试件发生爆破时系统压力突降值,其值的选取是基于作者之前的实验数据,输出量表示压力快速补偿模块工作时蓄能器液腔流量Q1的变化。Gain1为蓄能器液腔中液体质量的倒数1/ma,Gain2为Ba/ma,Gain3对应为Ca/ma,Gain2与Gain3之和即为蓄能器传递函数中的2ζωn,Gain4表示ka+kp0Aa/V0,即为系统无阻尼固有频率的平方ωn2。进行仿真实验,得到横截面积Aa和初始充气压力p0相同而公称容积不同的蓄能器吸收压力冲击效果的曲线,如图6所示。
基于文献[1]的方法,通过图2压力动态控制模块的工作原理图,结合本文所选择的具体元件,推导出压力动态控制模块的开环传递函数为
(1)
式中:Pa(s)为压力模块输出量;U0(s)为控制电压信号;Ksv为电液比例阀的流量增益,m3/(s·A);K0为比例放大器增益,A/V;EV为液体的体积弹性模量;A1为液压缸的有效作用面积,m2;A2为活塞杆面积,m2;V0为试压容器容积,m3;ωsv为电液比例阀固有频率,rad/s;ξsv为电液比例阀阻尼比;ωy为液压缸一负载质量系统的固有频率,rad/s;ξy为液压缸一负载质量系统的阻尼比。
压力动态控制模块的闭环传递函数为

(2)
式中:Ky为压力传感器比例系数。
2)确定PID控制器参数
系统设置了7个限位开关,分别用于检测各部分的工作状态。其中,SQ1 检测待剪板料是否被输送到位。SQ2、SQ3 分别检测压块B 的状态,检测压块是否压紧已到位的板料;SQ4 检测剪切刀A 的状态;SQ7 为光电接近开关, 检测板料是否被剪断落入小车;SQ5 用于检测小车是否到位;SQ6 用于判断小车是否空载。送料机构E、压块B、剪切刀A和送料小车分别由4台电动机拖动。系统未启动时, 压块及剪切刀的限位开关SQ2、SQ3 和SQ4以及 SQ1、SQ7均断开。
本文参考文献[14]的方法,通过式(2)建立仿真模型,并采用Simulink Design Optimization工具对PID控制器参数进行寻优,最终得到参数的具体值为:Kp=3.50、Ki=0.01、Kd=2.20。
式中:Q1(s)为蓄能器液腔的液体输出流量,Pb(s)为蓄能器液腔压力,k为气体多变指数,ka为气体等效刚度系数。
压力突降是影响深海环境模拟实验装置工作性能的一个不确定因素,舱体类试件在爆破时造成试压容器内压力突降,为模拟真实海洋环境的要求,希望压力突降后能够快速恢复。对于压力突降后快速恢复问题,国内外研究不多。文献[5]通过闭环机械加载进行压力突降后快速补偿,但受电机启动特性和机械惯性影响,实际补偿速度慢。
有时研究人员和日记主人是同一个人(“研究人员本人日记”),此时研究人员就以自身经历为考察对象;有时研究人员不自己写日记或不用自己的日记,而要求被调查者(往往是语言学习者和语言教师)写日记,供研究人员使用。
针对以上问题,本文首先对压力补偿源进行研究。文献[6]针对工程机械液压系统在复杂工况时受较大压力冲击问题,提出在液压回路中安装气体式蓄能器对压力冲击进行吸收,仿真结果表明,选用合适参数的气体式蓄能器可对压力冲击具有良好的吸收效果,但该方式存在如何优选蓄能器的问题。本文借鉴文献[6]的思路,采用蓄能器在压力突降后快速补偿,压力快速补偿方法工作原理如图3。
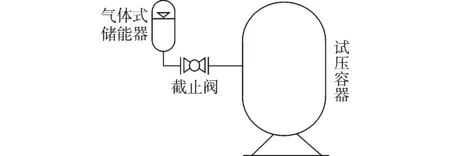
图3 压力快速补偿方法工作原理图Fig.3 The working schematic diagram of pressure fast compensation method
压力快速补偿方法的工作原理为:蓄能器气腔内为高压气体,当试压容器内试件发生爆破造成系统压力突降时,在气腔和液腔压差的作用下,蓄能器液腔内的液体快速补充给试压容器,使得系统压力迅速恢复。
边坡稳定性评价和治理涉及到水利水电工程、铁道工程等诸多工程领域,边坡失稳形成滑坡、崩塌及地裂缝等地质灾害,轻则增加投资、延长工期,重则摧毁建筑物、造成人员伤亡,能否正确评价其稳定性常常是此类工程成败的关键,也是确保工程安全和降低建设费用的重要环节。
2 压力快速补偿方法关键技术研究
本节分析蓄能器的数学模型,通过仿真研究其主要参数与吸收压力冲击效果之间的关系,以提高压力快速补偿性能。
2.1 蓄能器系统模型分析
综上所述,高职院校建筑类专业英语课程模块重构非常重要,这对于学生未来发展有一定影响。虽然当前大部分高职院校都为学生提供了专门的英语课程,但是在课程开展的过程中还是存在一定问题。大学生就业问题一直都被重点关注,学生需要不断提升自己学习能力与专业的英语水平才能满足众多建筑企业的需求。要注重学生的实践能力,让学生将所学习到的专业理论知识更好地运用到实践中,要重视建筑专业英语教学,让学生可以在课堂上多练习英语,通过英语表达想法,将专业英语与建筑知识相融合,高校需要充分意识到建筑专业英语课程模块重构的重要性,改变英语教学内容与教学模式,让学生可以从中获得更多知识,逐渐提升自身的英语水平。
综合考虑深海环境模拟实验技术研究现状,并结合水下作业设备研制工作的实际应用需求,爆破试件的容积约占整体容积的1%左右,本系统试压器总容积是253 L,因此本文研制的目标爆破试件容积ΔV为0.3 L,爆破压力pb为4.5 MPa,应用MATLAB软件对公称容积V0分别为4、6.3、10 L的蓄能器进行仿真。参考文献[11,17-18],蓄能器气腔的初始充气压力p0设为4.0 MPa,通过仿真分析蓄能器公称容积V0对于其吸收压力冲击效果的影响。
上周(10月15日-10月19日)国际尿素市场需求放缓,尿素经销商重心转向国内,尿素价格高位企稳。10月22日中国尿素 批 发 价 格 指 数(CNPI)为2110.01点,环比上涨0.39点,涨幅为0.02%;同比上涨345.48点,涨幅为19.58%;比基期上涨246.76点,涨幅为 13.24%。10月22日中国尿素零售价格指数(CNRI)为 2203.72点,环比上涨6.92点,涨幅为0.32%;同比上涨348.05点,涨幅为18.76%;比基期上涨298.76点,涨幅为15.68%。
要求从业人员是具备职业道德、掌握康复基础知识及过硬专业技能的复合型人才。培养具备在社区卫生服务中心、康复护理院、疗养院、养老院、老年福利院、居家养老服务及日间照料中心等各类机构,运用现代康复治疗技术对常见老年病、慢性病进行康复评估与治疗,并具备老年社会工作管理能力,具有爱心、耐心及责任心等良好职业道德、人文素养、创新精神的高素质技能型老年康复治疗人才非常必要[7]。
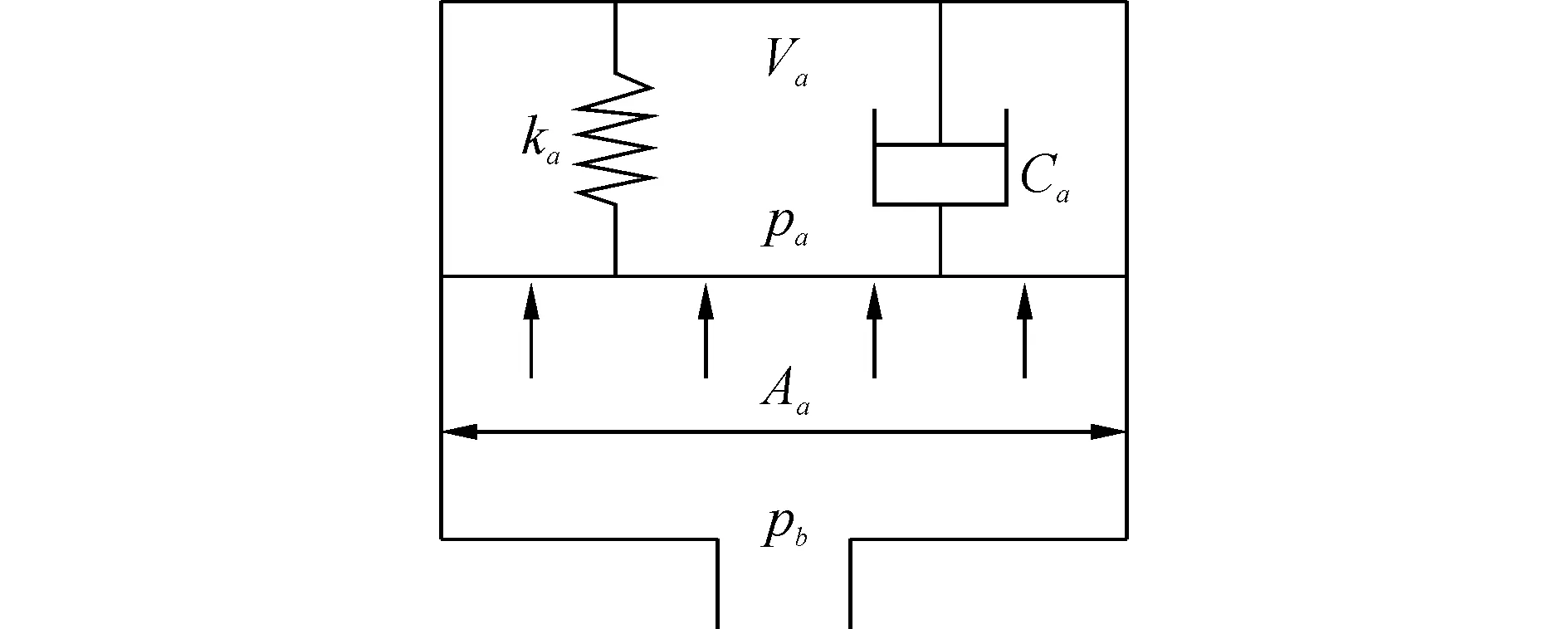
图4 气体式蓄能器等效力学模型Fig.4 The equivalent mechanical model of gas accumulator
本文基于牛顿第二定律,对蓄能器液腔对蓄能器模进行力学分析,得到以蓄能器液腔内液体为研究对象的数学模型[10,15-16]:
(3)
式中:Aa为蓄能器内腔的横截面积;pa为试件爆破时蓄能器气腔内气体的压强;pb为试件爆破时蓄能器液腔的压强;Va为试件爆破时蓄能器气腔内气体的体积;ma为蓄能器液腔内液体的质量;Bb为液腔中液体的阻尼系数;Ca为气体阻尼系数[11];ka气体的等效弹簧刚度。
对式(3)进行拉氏变换,得到气体式蓄能器的传递函数:
(4)
1.3 压力快速补偿方法研究
本文蓄能器工作时其液腔放液速度快,近似为绝热过程,因此取k=1.4[12];刚度系数ka等效为气体压强变化量与体积变化量的比值,其表达式为[12]
(5)
根据蓄能器各结构参数之间的关系,对ka表达式进行整理得:
(6)
分析式(4)、(6),蓄能器系统的固有特性与其横截面积Aa、初始充气压力p0、初始充气体积V0和系统工作压力p2等参数有关。
2.2 蓄能器系统仿真研究
本文的研究背景是深海环境(水深大于4 000 m),基于上述分析,压力罐加压应该大于40 MPa。考虑到40 MPa压力陡降时进行快速补偿有一定的危险性,同时由于试验条件有限(已有的压力罐最大耐压7 MPa),为了探讨本文所提出方法的可行性,本文在仿真和实验中都选择4.5 MPa(对应水深450 m)。
考虑非期望产出的中国区域生态效率测度及差异分析 … ……………………………… 刘丙泉,王 超(2.45)
试压罐内压力突变与试验舱容积和试压罐容积相关。即,试验舱容积越大,压力突变值越大,试压罐容积越大,压力突变值越小。因此,单纯取试压罐容积突变来研究深海环境模拟实验装置的压力补偿能力不能充分说明问题。本文选取压力突变来验证本文研制的深海环境模拟实验装置的压力补偿能力。
ABAQUS建模后,将混凝土柱划分为8个单元,梁划分为10个单元,模型计算时调用PQ-Fiber子程序.
为建立蓄能器系统的仿真模型,本文将式(6)代入式(4),得到蓄能器系统的阻尼系数ξ和无阻尼固有频率ωn的表达式:
(7)
(8)
参考蓄能器标准系列手册,并根据压力快速补偿方法的实际参数,对不同公称容积时蓄能器的ξ、ωn进行求解,得到数据如表1所示。
表1 气体式蓄能器不同公称容积下相应参数
Table 1 The corresponding parameters of different nominal volume of gas accumulator
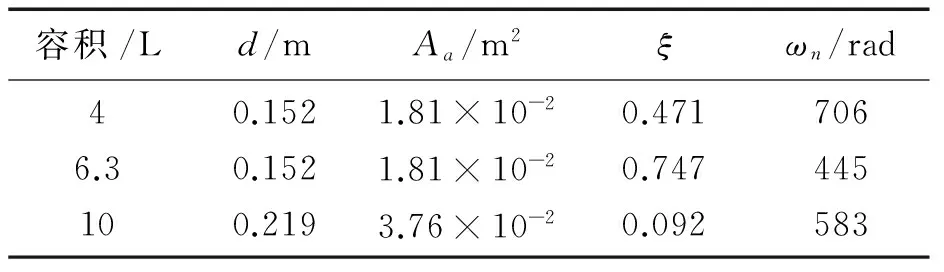
容积/Ld/mAa/m2ξωn/rad46.3100.1520.1520.2191.81×10-21.81×10-23.76×10-20.4710.7470.092706445583
根据式(2)在MATLAB软件Simulink环境中建立蓄能器系统吸收压力冲击的仿真模型,如图5所示,并将表1的数据代入图5对应位置。

图5 蓄能器系统仿真模型Fig.5 Accumulator system simulation model
1)推导传递函数
我们在三层交换机上建立VLAN 60与VLAN 70两个网段,并启用路由功能,以保证两个网段的用户可以互连互通.

图6 不同公称容积蓄能器吸收压力冲击效果Fig.6 The absorbing pressure impact effect of different nominal volume accumulator
分析图6公称容积V0为4.0 L、6.3 L、10 L的曲线可知,随着公称容积V0增大,蓄能器系统的响应速度减慢,但稳定性增强,输出流量的振荡情况减小,当V0从4.0 L依次增加至6.3 L和10 L时,蓄能器吸收相同压力冲击所耗时间分别为0.015 s、0.013 s、0.10 s。可以看出,V0并不是越大越好,也不是越小越好,对于本文深海环境模拟实验装置的具体参数,当V0为6.3 L时,蓄能器具有良好的吸收压力冲击效果,输出流量的振荡最小,吸收压力冲击的时间最短。基于仿真结果,本文选定V0为6.3 L的气体式蓄能器。
3 实验研究
为了验证本文设计的压力动态控制模块和压力快速补偿方法的可行性,验证在试压容器和蓄能器之间串联液压缸的压力快速补偿的效果,作者搭建了深海环境模拟实验装置进行相关实验研究。
3.1 压力动态模拟实验研究
本文搭建了深海环境模拟实验装置如图7所示。

图7 深海环境模拟实验装置Fig.7 Deep sea environment simulation experiment device
为了验证本文研制的深海环境模拟实验装置模拟水下设备工作在不同水深时的水压变化情况,参考我国“蛟龙号”载人潜器7 000 m海试时的下潜速度(约0.84 m/s)[13],本文设计斜率为0.01 MPa/s斜坡函数跟踪实验。考虑到水下装备因地形限制或工作需求,可能往复升沉运动,本文又设计了频率为0.025 Hz、0.05 Hz、0.1 Hz的正弦曲线跟踪实验。
1)斜坡函数跟踪效果
压力动态控制模块跟踪斜率为0.01 MPa/s斜坡函数的实际压力曲线及其跟踪误差如图8所示。
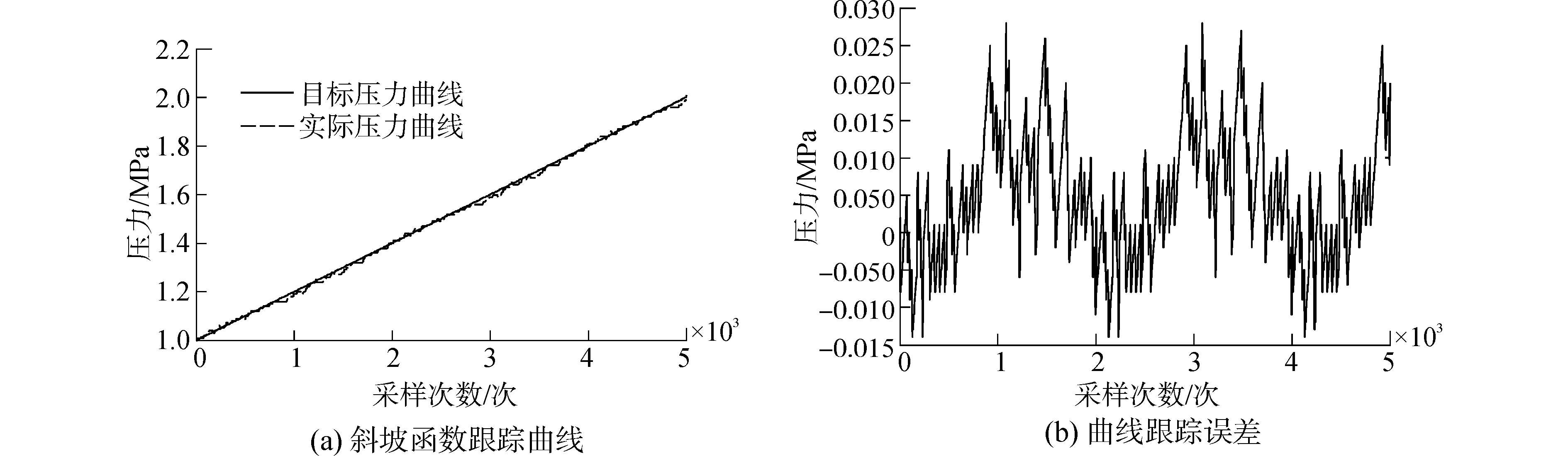
图8 斜坡函数跟踪曲线及跟踪误差Fig.8 Slop function tracking curves and tracking error
图2中,压力动态控制模块工作过程为:电液比例阀根据放大器接收信号的幅值和极性调节阀口的开度和方向,控制油路的流量和方向,进而控制水路中进出试压容器的液体流量和方向,实现模拟实验装置的压力动态控制。
2)正弦曲线跟踪效果
频率为0.025、0.05、0.1 Hz,幅值为0.5 MPa的正弦实际跟踪曲线及跟踪误差如图9所示。
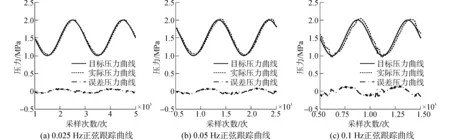
图9 正弦信号跟踪曲线及跟踪误差Fig.9 Sinusoidal signal tracking curves and tracking error
分析图9可知,压力动态控制模块可以较好地跟踪目标曲线的形状特征。斜坡函数和正弦曲线跟踪实验结果,验证了本文研制的压力动态控制模块的可行性。实验过程中电液比例阀工作良好,系统升压过程稳定,表明本文提出在液压回路中串联液压缸来实现油水转换方案的有效性,将图9不同频率正弦曲线跟踪数据整理为表2。
分析表2数据,目标曲线频率分别为0.025 Hz、0.05 Hz、0.1 Hz时,最大跟踪误差分别为0.05 MPa、0.10 MPa、0.18 MPa,相位滞后分别为4°、8°、15°。分析其原因主要是受液压、机械系统的惯性以及闭环系统延迟特性影响,造成跟踪曲线相位滞后,对此,本文接下来研究相位滞后问题。
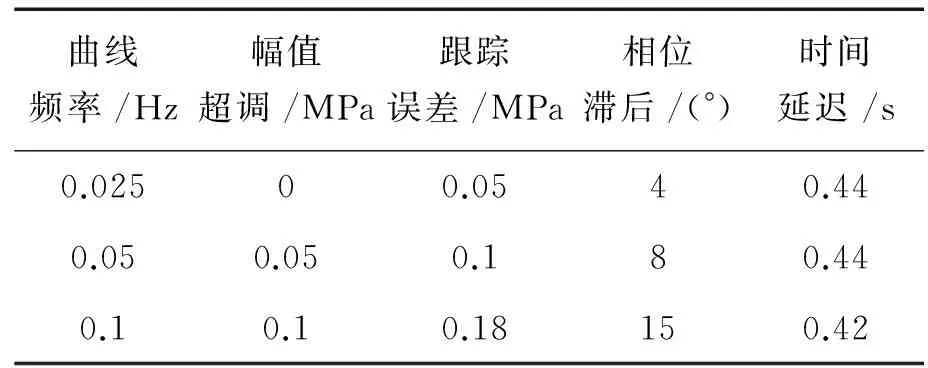
表2 不同频率的正弦曲线跟踪指标
3.2 针对相位滞后的改进算法及其实验验证
已有文献表明:初始压力p0越大,蓄能器的快速补偿能力越好,但是气体体积V0并不是越大越好,V0的优选值涉及到输出流量振荡、吸收压力耗时等因素。为了分析蓄能器在压力快速补偿方法中的性能,本节研究蓄能器的主要结构参数V0和工作参数p0对其性能的影响。文献[7]指出,气体式蓄能器为一个模型复杂的二阶系统,影响其工作性能的参数较多,对此,本文采用机理分析法对其工作原理进行分析[8],参考文献[9,19]简化气体式蓄能器本体模型,如图4所示。
本文目标曲线为Y1=Asin2πft+B,根据图9实验可知,实际跟踪曲线表达式为Y1=Asin(2πft+θ)+B,即实际跟踪曲线与目标曲线之间存在θ的相移,θ具体数值可由实验得到的时间延迟t1、目标函数频率f来求得,三者的关系为θ=2πft1。为了得到理想的压力跟踪曲线,本文根据目标函数的频率f特征,对上述目标函数表达式Y1补偿一定的相角-θ,得到经处理后的表达式Y2=Asin(2πft-θ)+B,控制系统根据表达式Y2进行控制,从而实现相位补偿的目的。
电路说明:太阳能电池板两块串联,每块标准:15cm×6cm、3V、0.2A;Led灯泡有白光、黄光、绿光、蓝光等颜色,最终选用白光(3.0 V~3.2V);旧手机电池电压3.7V;二极管1使用较小的二极管,二极管2(分压用)使用较大的二极管。
根据表2中跟踪曲线的参数,由θ=2πft1得到本文频率为0.025 Hz、0.05 Hz、0.1 Hz时目标曲线的补偿相角θ分别为π/45、2π/45、π/12,根据Y2进行实验,如图10所示。
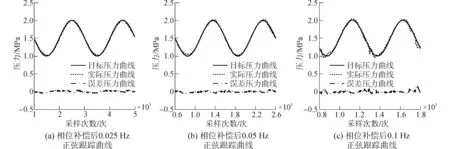
图10 相位补偿后正弦跟踪曲线及跟踪误差Fig.10 The sine tracking curves after phase compensation and tracking error
为了方便分析相位补偿算法的实际效果,将图9和图10中,跟踪不同频率正弦曲线、有无相位补偿算法的跟踪效果整理成表3。
表3 不同频率正弦曲线有/无相位补偿算法时跟踪效果
Table 3 Sine curves following indexes with/without load phase compensation algorithm

曲线频率/Hz最大跟踪误差/MPa无补偿有补偿改善效果/%0.0250.050.021500.050.100.041500.10.180.07152
分析表3,有相位补偿时,对应0.025 Hz、0.05 Hz、0.1 Hz频率的正弦曲线,最大跟踪误差分别为0.02 MPa、0.04 MPa、0.07 MPa,相比无补偿时,分别减小了150%、150%、152%,反映出本文提出的相位补偿方法的有效性。
3.3 压力快速补偿实验研究
“二十四桥明月夜”则有点暴发户式的排场了:一整个火腿,挖二十四个洞,填入豆腐蒸之,最后把火腿丢弃,只取豆腐用之——其实,豆腐炖火腿是苏浙沪地区最常见的家常小菜之一,火腿提供了咸鲜的滋味,豆腐提供了滑润醇厚的口感,不需要别的调料,只要一撮葱花配色,就是上得厅堂的好菜。
为了验证本文研制的压力快速补偿方法的可行性,本文进行压力快速补偿实验研究。
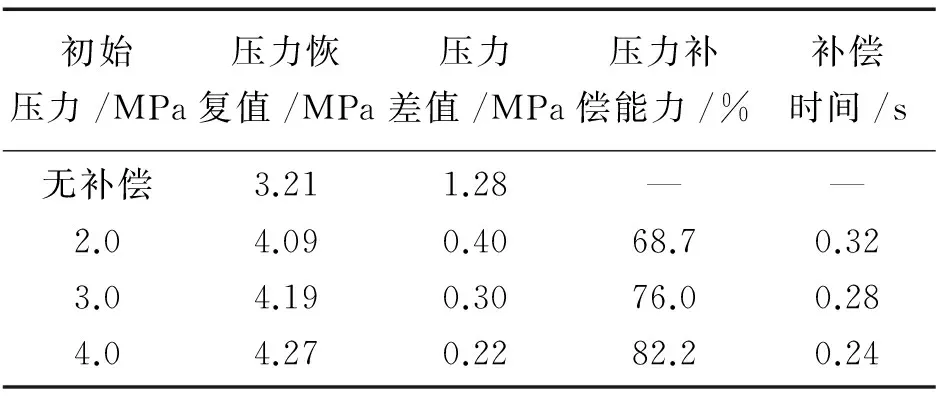
实验时试压容器容积为253 L,实验试件容积为0.3 L,蓄能器公称容积为6.3 L。为了研究初始充气压力对于蓄能器工作性能的影响,本文设定蓄能器初始充气压力分别为2.0 MPa、3.0 MPa、4.0 MPa[11],得到压力快速补偿方法的数据如表4所示。
分析表4可知,当试压容器内加压到4.49 MPa(爆炸压力值)时,舱体类试件发生爆破,无压力快速补偿时,系统压力迅速下降至3.21 MPa。理论上,需要尽快将压力由3.21 MPa补偿到爆炸压力4.49 MPa,即“需要补偿压力”为1.28 MPa。
有压力快速补偿时,本文以初始充气压力2.0 MPa为例,经过0.32 s后,压力恢复至4.09 MPa,压力补偿能力为4.09 MPa-3.21 MPa=0.88 MPa,占需要补偿压力1.28 MPa的68.7%,本文将68.7%称为压力补偿能力。其他充气压力的压力补偿能力见表4。
比较文献[5]的补偿时间11.76 s,本文方法的补偿时间很小。实验结果验证了本文研制的压力快速补偿方法的可行性及其迅速性。进一步分析表4,本文方法对压力突降后快速补偿问题有较好效果,但压力恢复值与爆破时的压力值仍存在一定差值。
表4 不同蓄能器初始充气压力时实验结果
Table 4 Experimental result indexes of different accumulator models
初始压力/MPa压力恢复值/MPa压力差值/MPa压力补偿能力/%补偿时间/s无补偿2.03.04.03.214.094.194.271.280.400.300.22—68.776.082.2—0.320.280.24
3.4 压力快速补偿方法改进方案及其实验验证
在基于气体式蓄能器的压力快速系统中,该系统工作完成后,试压容器内的压力仍与目标压力存在一定差值。本文针对小容积蓄能器系统压力补偿能力有限的问题,提出在压力快速补偿方法中气体式蓄能器和试压容器之间串联液压缸的方式进行改进。改进方案如图11所示。
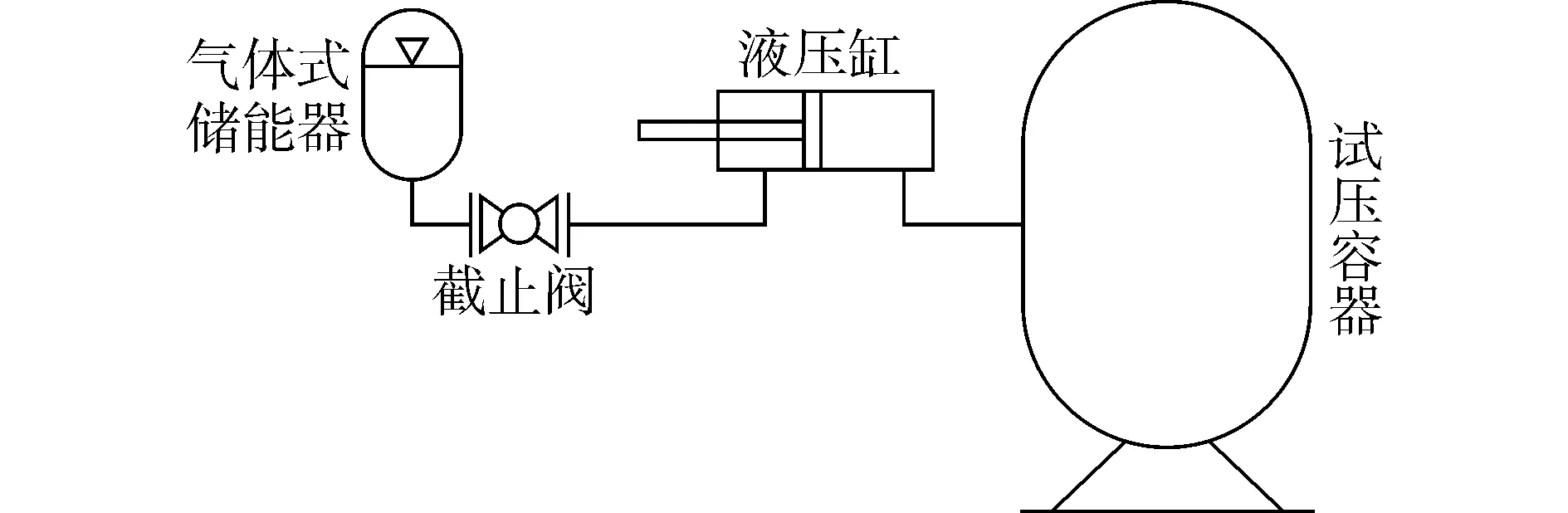
图11 压力快速补偿方法改进方案Fig.11 Improved scheme for pressure fast compensation method
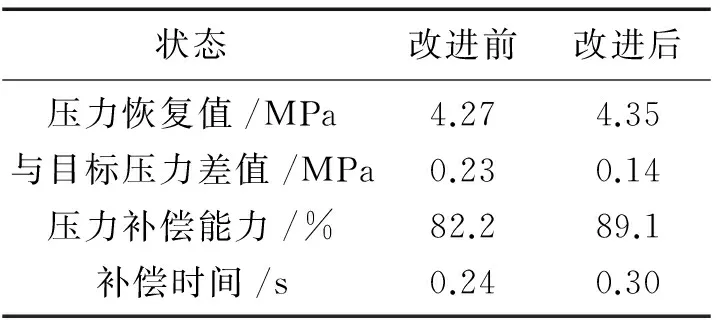
图11中,液压缸的有杆腔与蓄能器液腔出口相连,无杆腔与试压容器直接相连,对于试压容器内同等ΔV液体补充量的需求,该方式通过间接减小蓄能器气腔内气体体积变化量,从而达到提高其压力补偿能力的目的。为了检验改善方案的效果,本文在深海环境模拟实验装置上进行压力快速补偿实验。实验中液压缸的参数为:内径63 mm,活塞杆直径45 mm,行程为500 mm,最大容积为1 550 ml。液压缸有杆腔压力为4.0 MPa,得到压力快速补偿方法的相关数据如表5所示。
华北多特高压交直流强耦合大受端电网系统保护方案设计//罗亚洲,陈得治,李轶群,王青,张剑云,訾鹏,等//(22):11
表5 补偿方法改进前/后的压力快速补偿效果
Table 5 The pressure fast compensation effect parameters before/after method improved
状态改进前改进后压力恢复值/MPa与目标压力差值/MPa压力补偿能力/%补偿时间/s4.270.2382.20.244.350.1489.10.30
由表5中数据可知,改进前后,压力恢复值增加了0.08 MPa,与目标压力的差值减小了0.09 MPa,压力补偿能力由82.2%提高至89.1%,相对提高了6.9%。补偿时间增加了0.06 s。以上实验结果反映出,本文提出的串联液压缸的方案,对于改善压力快速补偿方法的压力补偿能力有较好的效果,不足的是补偿时间稍有增加,可以根据实验对补偿压力和补偿时间的不同要求,选择是否采用该方法。
4 结论
1)针对深海环境模拟实验装置模拟外部复杂压力环境的要求,研制了一套压力动态控制模块。针对电液比例阀不适合水介质的问题,提出串联液压缸实现油水转换的方法,函数跟踪实验结果验证了本文研制的压力动态控制模块以及串联液压缸实现油水转换方法的可行性。
2)针对液压系统滞后特性影响压力动态模块性能的问题,本文提出采用相位补偿的方法,跟踪实验结果表明,相位补偿方法具有很好的改善效果。
3)针对模拟实验装置在实验过程中压力突降后快速恢复问题,本文研究了压力快速补偿方法。压力快速补偿实验结果表明,当蓄能器初始充气压力为4.0 MPa时,突降后的压力由3.21 MPa快速恢复至4.27 MPa,耗时0.24 s,压力补偿能力为82.2%。反映出较好的压力快速补偿效果。
4)针对经过快速补偿后,系统压力与目标压力仍存在一定差值的问题,本文提出串联液压缸的改善方法。实验结果表明,采用该方法后,压力补偿能力达到89.1%,反映出较好的补偿效果。
[1]孙小辉, 李维嘉, 曹和云. 基于模糊PID的压力筒动态保压系统[J]. 中国舰船研究, 2014, 9(1): 127-131. SUN Xiaohui, LI Weijia, CAO Heyun. A dynamic pressure packing system based on fuzzy PID[J]. Chinese journal of ship research, 2014, 9(1): 127-131.
[2]DUNN P M. The navy unmanned undersea vehicle master plan[J]. Naval undersea warfare center, 2006, 15-23.
[3]李维嘉, 李绍安, 罗兴桂. 高精度压力筒试验系统[J]. 中国造船, 2008, 49(1): 72-76. LI Weijia, LI Shao'an, LUO Xinggui. The pressure vessel experiment system with high precision[J]. Shipbuilding of China, 2008, 49(1): 72-76.
[4]谭宗柒, 戴浩林, 汪云峰. 基于AMESim的深度模拟器液压系统设计与仿真[J]. 机床与液压, 2009, 37(2): 150-152, 200. TAN Zongqi, DAI Haolin, WANG Yunfeng. Design and simulation of hydraulic depth simulator based on AMESim[J]. Machine tool & hydraulics, 2009, 37(2): 150-152, 200.
[5]李天. 深海压力环境模拟试验装置及其恒压控制系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2013: 40-50. LI Tian. Research on the deep-sea pressure environmental simulation test device and its constant pressure control system[D]. Harbin: Harbin Engineering University, 2013: 40-50.
[6]CHO D O, WHITCOMB M A. A review of the ocean science and technology partnership between US and Korea[J]. Marine policy, 2008, 32(3): 502-513.
[7]李浪, 王海涛, 龚烈航. 皮囊式蓄能器吸收压力脉动的参数分析与试验[J]. 液压与气动, 2012(7): 3-6. LI Lang, WANG Haitao, GONG Liehang. The parameter analysis and experiment of the bladder accumulator absorbing pressure pulsation[J]. Chinese hydraulics & pneumatics, 2012(7): 3-6.
[8]吕少力. 波义耳定律在液压缸加载系统中的应用[J]. 液压与气动, 2010(11): 63-64. LYU Shaoli. Application of boyle's law in loading system of hydraulic cylinder[J]. Chinese hydraulics & pneumatics, 2010(11): 63-64.
[9]OHISHI K, NAKAO M, OHNISHI K, et al. Microprocessor-controlled DC motor for load-insensitive position servo system[J]. IEEE transactions on industrial electronics, 1987, IE-34(1): 44-49.
[10]柳俊忻, 马彪, 李和言, 等. 基于吸收压力冲击的蓄能器参数设计及其仿真研究[J]. 车辆与动力技术, 2009(2): 6-11. LIU Junxin, MA Biao, LI Heyan, et al. Study on parameters design and hydraulic shock reduction of hydraulic accumulator for hydrostatic transmission system[J]. Vehicle & power technology, 2009(2): 6-11.
[11]马登成, 杨士敏, 陈筝, 等. 蓄能器对工程机械液压系统影响的仿真与试验[J]. 中国公路学报, 2013, 26(2): 183-190. MA Dengcheng, YANG Shimin, CHEN Zheng, et al. Simulation and experimental study on impact of accumulator on engineering machinery hydraulic system[J]. China journal of highway and transport, 2013, 26(2): 183-190.
[12]孔祥东, 权凌霄, 姚静, 等. 基于力学分析的蓄能器数学模型建立及实验研究[J]. 液压与气动, 2006(7): 31-34. KONG Xiangdong, QUAN Lingxiao, YAO Jing, et al. Accumulator is modeled on its stressing model and experiments research[J]. Chinese hydraulics & pneumatics, 2006(7): 31-34.
[13]崔维成, 刘峰, 胡震, 等. 蛟龙号载人潜水器的7 000米级海上试验[J]. 船舶力学, 2012, 16(10): 1131-1143. CUI Weicheng, LIU Feng, HU Zhen, et al. 7 000 m sea trials test of the deep manned submersible "JIAOLONG"[J]. Journal of ship mechanics, 2012, 16(10): 1131-1143.
[14]熊世和. 机电系统计算机控制工程[M]. 成都: 电子科技大学出版社, 1999: 115-122.
[15]MURAKAMI P, HIROAKI, NAOKA Y. Multiplier-accumulator macro for a 45 MIPS embedded RISC processor[J]. IEEE journal of solid-state circuits.1996,31(7): 1067-1071.
[16]SUNG P, KYEONGCHEOL Y. Multi-rate parity accumulator accumulator codes[J]. IEEE vehicular technology conference, 2003, 57(4): 551-740.
[17]杨燕芳.不同工况下皮囊式蓄能器工作参数的选择与计算[D]. 秦皇岛:燕山大学, 2011:25-26. YANG Yangfang. Working parameters selection and calculation of bladder-type accumulator under the different conditions[D]. Qinhuangdao: Yanshan University, 2011:25-26.
[18]战兴群,张炎华.二次调节系统中液压蓄能器数学模型的研究[J].中国机械工程,2001, 12(3):45-46. ZHAN Xingqun, ZHANG Yanhua. Research on the mathematical model of hydraulic accumulator in the two regulation system[J].China mechanical engineering, 2001, 12(3):45-46.
[19]宋孝臣. 入口特性蓄能器性能影响的研究[D]. 秦皇岛:燕山大学, 2006:12. SONG Xiaochen. Research on the influence of inlet characteristics on the performance of accumulator[D]. Qinhuangdao: Yanshan University, 2006:12.
Experiment devices for simulating a deep-sea environment and dynamic pressure control technology
ZHANG Qiang, ZHANG Leili, ZHANG Mingjun
(College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
In this paper, we develop a set of deep-sea environment simulation experiment devices with a large continual change scope of simulative pressureto simulate the pressureof a deep-sea environment. The dynamic pressure control technology isalso investigated. The method of connecting hydraulic cylinders in series in a hydraulic circuit is proposed to solve the boundedness that electro-hydraulic proportional valve uses a water medium. The phase compensation algorithm is proposed in view of the inherent hysteresis of the dynamic pressure control module. The fast pressure compensation method based on the gas accumulatoris proposed considering the fact that the system pressure cannot rapidly return to the target value caused by the test-pieceexplosion. The feasibility and effectiveness of the dynamic pressure control technology and the fast pressure compensation technology are verified by the experimental study of the simulation devices.
deep sea environment;series hydraulic cylinder; oil and water conversion; dynamic pressure control module; phase compensation algorithm; fast pressurecompensation method; hydraulic system
2015-10-19.
日期:2016-09-28.
国防基础科研资助项目(B2420133003).
张强(1987-),男,博士研究生; 张铭钧(1963-),男,教授,博士生导师,博士.
张铭钧,E-mail:zhangmingjun@hrbeu.edu.cn.
10.11990/jheu.201510044
TH137.3
A
1006-7043(2016) 11-1565-08
张强,张雷励,张铭钧. 深海环境模拟实验装置及压力动态控制技术[J]. 哈尔滨工程大学学报, 2016, 37(11): 1565-1572. ZHANG Qiang, ZHANG Leili, ZHANG Mingjun. Experiment devices for simulating a deep-sea environment and dynamic pressure control technology[J]. Journal of Harbin Engineering University, 2016, 37(11): 1565-1572.
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160928.1419.054.html
