近空间飞行器爬升段跟踪控制
2016-12-12顾臣风江驹吴雨珊
顾臣风,江驹,吴雨珊
(南京航空航天大学 自动化学院,江苏 南京 210016)
近空间飞行器爬升段跟踪控制
顾臣风,江驹,吴雨珊
(南京航空航天大学 自动化学院,江苏 南京 210016)
在近空间飞行器加速爬升模态下,传统的滑模控制方法在处理不确定性问题时,存在收敛速度慢、鲁棒性不强和抖振严重等不足。针对这些问题,本文提出双幂次趋近律滑模控制方法来设计飞行控制器,从而实现飞行器爬升段轨迹的精确跟踪。将飞行器非线性模型进行精确反馈线性化处理,并利用李雅普诺夫稳定性理论进行稳定性分析。仿真分析了双幂次趋近律滑模控制方法和传统滑模控制方法的控制效果。结果表明:在处理具有参数不确定性和外界干扰的非线性系统时,双幂次趋近律滑模控制方法能够精确地跟踪指令信号,并且具有较强的稳定性和鲁棒性。
近空间飞行器;跟踪控制;爬升模态;双幂次趋近律;滑模控制;参数不确定;李雅普诺夫稳定性理论
近空间飞行器强非线性、快时变、强耦合以及不确定性等动态特性给飞行控制带来了困难[1-3]。滑模控制具有快速响应、对应参数变化及扰动不灵敏,无需系统在线辨识等优点[4-5],适用于解决不确定非线性系统的控制问题。滑模控制广泛应用于飞行控制系统的设计中,文献[6]针对X-33A飞行器的发射段和再入段设计滑模变结构控制器,具有良好的姿态控制效果和鲁棒性。文献[7]提出的快速幂次趋近律的控制方法具有较快的收敛速度。文献[8]提出双幂次趋近律滑模控制方法用以实现机器人控制,解决了收敛速度慢的问题,但仍存在严重的抖振。文献[9]将双幂次趋近律与传统的趋近律进行对比,发现双幂次趋近律具有更快的收敛速度以及更好的运动品质。双幂次趋近律不仅可以有效去除抖振,无论在远离还是接近滑动模态的情况下都具有很快的趋近速度,并且具有较好的鲁棒性。
巡航段将飞行器的质量看作常量,而爬升段将质量看作状态量,增加了系统的复杂性。爬升段轨迹受飞行高度、马赫数及发动机推力快速变化的影响,对空气动力参数敏感,导致爬升段的控制更加困难。文献[10]将爬升段划分为不同模态进行控制律设计,设计过程中需要选取多个工作点,步骤繁琐。文献[11]针对爬升段的速度和高度进行协调控制,设计迎角和俯仰角速率跟踪曲线,设计过程复杂。为了解决爬升段跟踪控制问题,结合双幂次趋近律有效去除抖振、趋近速度快以及鲁棒性强的特点,本文提出双幂次趋近律滑模控制方法,并验证了所设计的控制器能够实现飞行器爬升段轨迹的精确跟踪,具有稳定性和鲁棒性。
1 爬升段数学模型
1.1 动力学模型
爬升段质量被引入为状态量[12],得到飞行器纵向运动方程[13]:
式中:V表示飞行器速度,h表示飞行高度,γ表示飞行航迹倾斜角,α表示飞行迎角,q表示俯仰角速率,纵向转动惯量Iyy可以表示为∫(x2+z2)dm=Iyy,R为地球半径,r表示飞行器到地心的距离r=R+h,GM为万有引力常数。
1.2 推力模型
将近空间飞行器的发动机推力模型等效为二阶模型[14],具体表达式如下
式中:β表示发动机节流阀调定值, ζ为阻尼比,ω为固有频率。
爬升段推力[15]和燃料比冲[16]计算公式如下
式中:CT为发动机推力系数,ρ为大气密度。
1.3 气动力模型
飞行器受到的升力和阻力计算公式如下
式中:s为参考面积;CL和CD为升力系数和阻力系数,是马赫数和迎角的函数。图1给出升力系数CL和阻力系数CD与马赫数Ma和迎角α的关系。
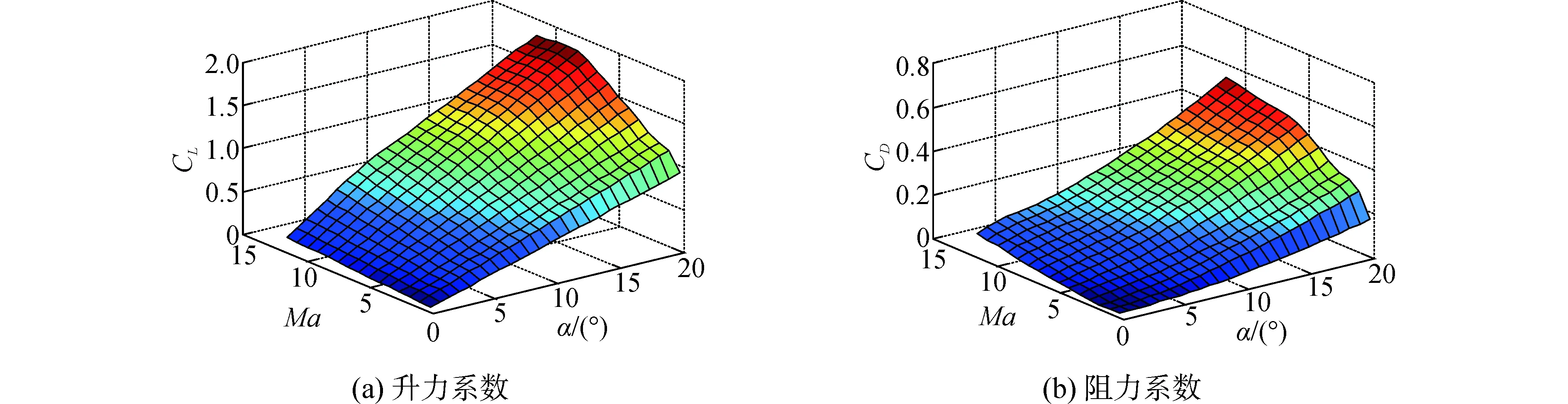
图1 升力和阻力系数Fig.1 Lift coefficient and drag coefficient
2 滑模变结构控制器设计
2.1 纵向模型反馈线性化
采用精确线性化处理方法对非线性模型的速度V和高度h进行精确反馈线性化处理[14]。
将近空间飞行器的纵向非线性模型写成多输入多输出的仿射非线性控制系统:

(13)
式中:f(x)、G(x)、H(x)为Rn中相应维数的光滑向量场。
飞行速度V和飞行高度h分别经过3次和4次微分后,发动机节流阀调定值βC以及控制输入量升降舵偏转角δe出现在微分式中。将控制输入量单独提取后得到系统精确反馈线性化后的模型:
2.2 双幂次趋近律滑模控制律
爬升段控制系统设计目标是通过设计合适的控制输入δe、βC,使控制系统的飞行速度V和飞行高度h能很好地跟踪设定的指令信号Vd和hd。
跟踪误差:
eV(t)=V(t)-Vd(t)
eh(t)=h(t)-hd(t)
针对飞行器纵向模型选择积分滑模面[9]:
式中:λV、λh为待设计正常数,积分项用于消除稳态误差。对S微分后有:
(1)
(2)
将全状态反馈线性化模型代入式(2),得到

ueq=
若det(BBT)≠0,则矩阵非奇异。
(3)
因为b11b21≠b12b22,即det(BBT)≠0,矩阵BBT为非奇异矩阵,(BBT)-1存在,式(3)成立。
设计双幂次趋近律为

(4)
式中:kV1,kV2,kh1,kh2>0;0<αV,αh<1;βV,βh>1;sgn(SV)、sgn(Sh)为符号函数。
控制器由等效控制项和双幂次趋近律控制项组成。
2.3 稳定性分析
本节对设计的双幂次趋近律滑模控制的可达性进行验证,首先定义李亚普诺夫函数:
函数对时间t的导数为
kV2|SV|αVSVsgn(SV)-kh1|Sh|βhShsgn(Sh)-
kh2|Sh|αhShsgn(Sh)=-kV1|SV|βV+1-
kV2|SV|αV+1-kh1|Sh|βh+1-kh2|Sh|αh+1
当飞行控制系统中存在不确定性有界干扰项时,控制系统的稳定性存在如下定理。
定理1 当存在外界不确定性有界扰动时,飞行控制系统满足以下条件时是全局稳定的。当t→∞时
证明 将不确定干扰项代入式(4),得到
式中:ΔFV、ΔFh为不确定干扰的误差项。
kh2|Sh|1+αh+|Sh||ΔFh|+|SV||ΔFV|=-|SV|(kV2|SV|αV-|ΔFV|)-|Sh|(kh2|Sh|αh-
|ΔFh|)-kV1|SV|1+βV-kh1|Sh|1+βh
(5)
由上述推导结果可知,不等式(5)若满足:
kV2|SV|αV-|ΔFV|≥0,kh2|Sh|αh-|ΔFh|≥0

进一步将上式变换为如下形式:
kh2|Sh|1+αh+|Sh||ΔFh|+|SV||ΔFV|=-|SV|(kV1|SV|βV-|ΔFV|)-|Sh|(kh1|Sh|βh-
|ΔFh|)-kV2|SV|1+αV-kh2|Sh|1+αh
(6)
与不等式(5)类似,不等式(6)如果满足:
kV1|SV|βV-|ΔFV|≥0,kh1|Sh|βh-|ΔFh|≥0

3 仿真验证
爬升段初值、期望终值以及指令信号:
V0=590 m/s , h0=3 528 m
Vf=4 590 m/s, hf=33 528 m
Vd=590+10t, hd=3 528+75t
飞行器在爬升过程中按照爬升方案进行爬升,仿真时间为400 s(如图2)。传统滑模控制方法在速度和高度的跟踪精度上不如双幂次趋近律控制方法精确,存在稳态误差。从迎角和升降舵偏角的变化曲线可知,传统滑模控制方法不能有效的抑制系统抖振。
俯仰力矩惯性积、飞机表面积、翼弦长摄动:
Iy=I0(1+ΔI), s=s0(1+Δs), c=c0(1+Δc)
近空间飞行器具有显著的参数不确定性,因此在仿真过程中加入不确定参数摄动,对比分析传统滑模控制方法和双幂次趋近律滑模控制的效果(如图3)。

在加入不确定参数摄动后(如图4),传统滑模控制方法控制下的系统在153.86 s处发散,而双幂次趋近律滑模控制仍具有较高的跟踪精度,到达爬升段的跟踪目标。在加入常值干扰的情况下,传统滑膜控制方法控制下的系统的速度和高度跟踪出现很大的跟踪误差,而双幂次趋近律控制方法速度和高度仍能保证很高的跟踪精度。
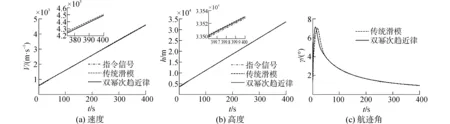
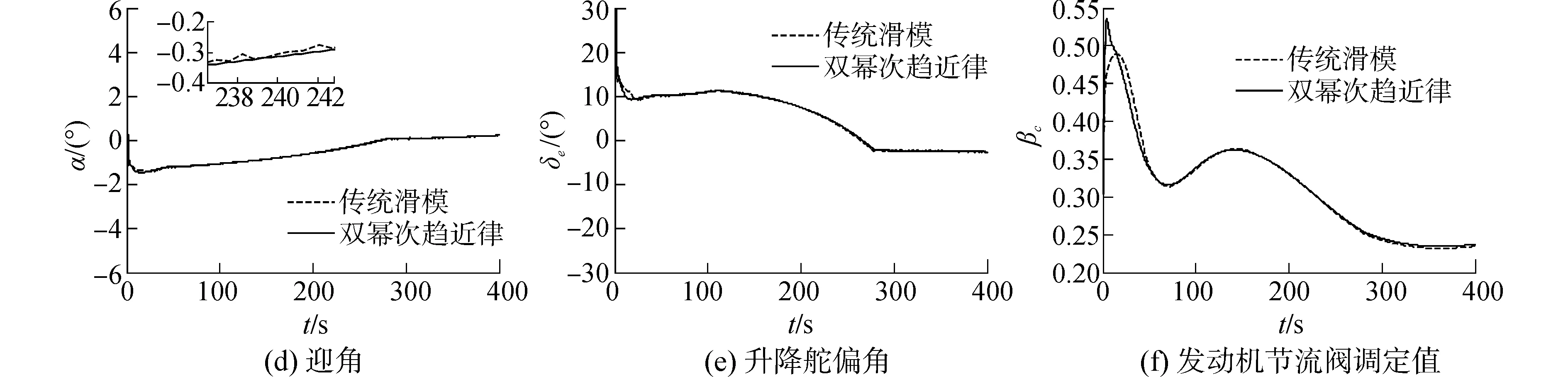
图2 爬升段指令跟踪Fig.2 Command tracking of climbing phase
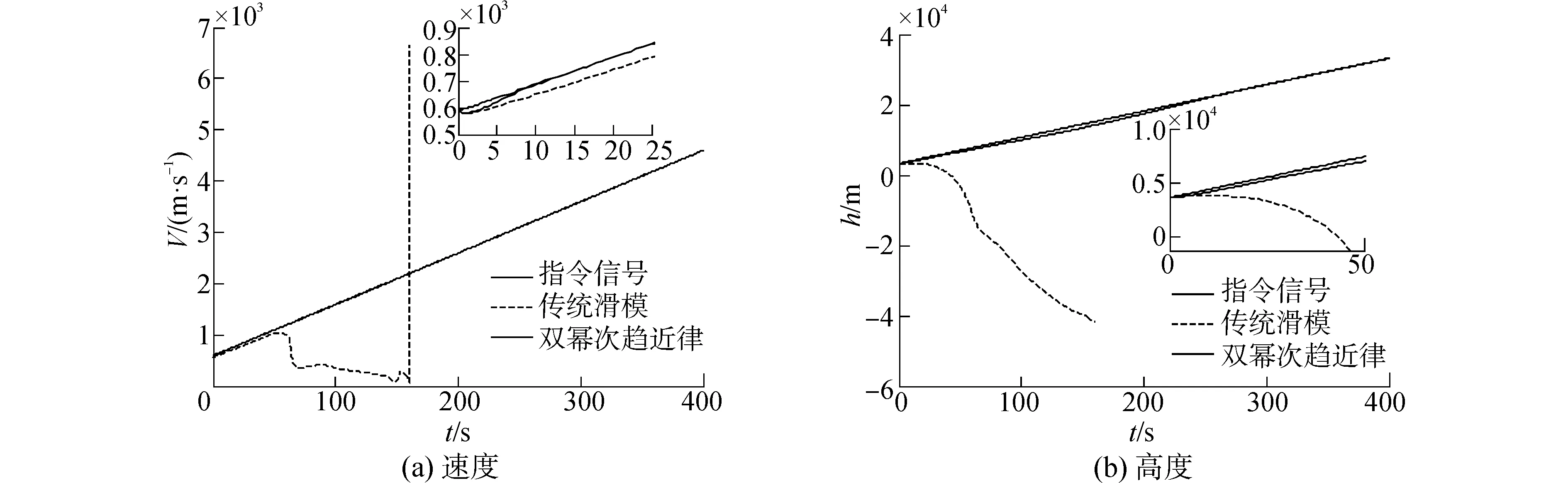

图3 参数摄动下指令跟踪Fig.3 Command tracking with parameter uncertainties
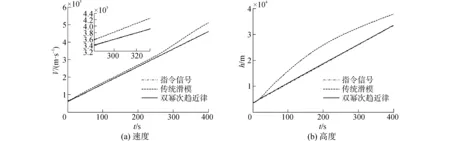
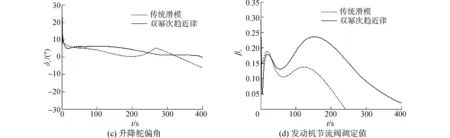
图4 干扰下指令跟踪Fig.4 Command tracking with distractions
4 结束语
为了体现飞行器在爬升模态的特性,综合考虑了爬升过程中大气密度变化、质量变化、发动机推力差异及气动参数变化对爬升段控制的影响,研究了近空间飞行器爬升段的跟踪控制问题。在未加参数摄动和干扰的情况下,传统滑模和双幂次趋近律滑模控制方法均具有较好的跟踪精度。对比分析两种滑模控制方法在处理具有参数不确定性和外界干扰系统的效果,结果表明传统滑模控制方法没有实现对指令信号的跟踪,使得控制系统呈现发散的趋势。而双幂次趋近律滑模控制方法仍具有很高的跟踪精度,并且能够更好的抑制系统抖振。因此,双幂次趋近律滑模控制方法对存在模型不确定性和外界干扰的系统具有良好的跟踪控制效果,具有较好的稳定性与鲁棒性。
[1]吴宏鑫, 孟斌. 高超声速飞行器控制研究综述[J]. 力学进展, 2009, 39(6): 756-765. WU Hongxin, MENG Bin. Review on the control of hypersonic flight vehicles [J]. Advances in mechanics, 2009, 39(6): 756-765.
[2]方存光, 孙勇, 王伟. 高超声速飞行器及其飞行状态控制[J]. 控制工程, 2009, 15(S1): 21-23. FANG Cunguang, SUN Yong, WANG Wei. Hypersonic aircraft and its flying status control[J]. Control engineering of China, 2009, 15(S1): 21-23.
[3]SHI Wei, JING Zhongliang, YANG Yongsheng, et al. A pseudospectral approach to ascent trajectory optimization for hypersonic air-breathing vehicles[C]//Proceedings of the 9th Asian Control Conference (ASCC). Istanbul: IEEE, 2013: 1-6.
[4]XU Haojian, MIRMIRANI M D, IOANNOU P A. Adaptive sliding mode control design for a hypersonic flight vehicle[J]. Journal of guidance, control, and dynamics, 2004, 27(5): 829-838.
[5]SUN Haibin, LI Shihua, SUN Changyin. Finite time integral sliding mode control of hypersonic vehicles[J]. Nonlinear dynamics, 2013, 73(1/2): 229-244.
[6]SHTESSEL Y, MCDUFFIE J, JACKSON M, et al. Sliding mode control of the X-33 vehicle in launch and re-entry modes[R]. Boston, MA: American Institute of Aeronautics and Astronautics, 1998: 1352-1362.
[7]YU Shuanghe, YU Xinghuo, SHIRINZADEH B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964.
[8]梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38(5): 552-557. MEI Hong, WANG Yong. Fast convergent sliding mode variable structure control of robot[J]. Information and control, 2009, 38(5): 552-557.
[9]张合新, 范金锁, 孟飞, 等. 一种新型滑模控制双幂次趋近律[J]. 控制与决策, 2013, 28(2): 289-293. ZHANG Hexin, FAN Jinsuo, MENG Fei, et al. A new double power reaching law for sliding mode control[J]. Control and decision, 2013, 28(2): 289-293.
[10]刘茂汉. 可重复使用运载器上升段纵向控制律设计[D]. 南京: 南京航空航天大学, 2011: 23-27. LIU Maohan. Research on lognitudinal control technologies for reusable launch vehicle ascent flight[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011: 23-27.
[11]孟斌, 吴宏鑫, 林宗利, 等. 基于特征模型的X-34爬升控制研究[J]. 中国科学 F辑: 信息科学, 2009, 39(11): 1202-1209. MENG Bin, WU Hongxin, LIN Zongli, et al. Characteristic model based control of the X-34 reusable launch vehicle in its climbing phase[J]. Science in China series F: information sciences, 2009, 52(11): 2216-2225.
[12]宗群, 田柏苓, 窦立谦. 基于Gauss伪谱法的临近空间飞行器上升段轨迹优化[J]. 宇航学报, 2010, 31(7): 1775-1781. ZONG Qun, TIAN Bailing, DOU Liqian. Ascent phase trajectory optimization for near space vehicle based on gauss pseudospectral method[J]. Journal of astronautics, 2010, 31(7): 1775-1781.
[13]丁洪波, 蔡洪. 基于特征参数的吸气式高超声速飞行器上升段轨迹优化[J]. 固体火箭技术, 2012, 35(3): 296-300. DING Hongbo, CAI Hong. A characteristic parameter trajectory optimization method for the ascent phase of the air-breathing hypersonic flight vehicle[J]. Journal of solid rocket technology, 2012, 35(3): 296-300.
[14]刘燕斌. 高超声速飞行器建模及其先进飞行控制机理的研究[D]. 南京: 南京航空航天大学, 2007: 42-43. LIU Yanbin. Research on modeling and advanced flight control theories for hypersonic vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2007: 42-43.
[15]KESHMIRI S, COLGREN R, MIRMIRANI M. Six-DOF modeling and simulation of a generic hypersonic vehicle, for control and navigation purposes[C]//AIAA Guidance, Navigation, and Control Conference and Exhlbit. Colorado: AIAA, 2006.
[16]MORIMOTO H. Trajectory optimization for a hypersonic vehicle with constraint[D]. Georgia, USA: Georgia Institute of Technology, 1997.
Tracking control for a near-space vehicle in the ascent phase
GU Chenfeng, JIANG Ju, WU Yushan
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
In the accelerating ascent phase of a near-space vehicle, the traditional sliding-mode control method has defects such as low convergence speed, insufficient robustness, and severe chattering when dealing with uncertainty. With respect to these problems, in this paper, we propose a dual-power reaching-law sliding-mode control method for designing the flight controller to achieve precise trajectory tracking in the ascent phase. This method uses full-state feedback to linearize the nonlinear model of the near-space vehicle, then analyzes the stability of the designed controller by the Lyapunov stability theory. A simulation analysis is conducted on the control effects of the traditional and the dual-power reaching-law sliding-mode control methods. The results demonstrate that the dual-power reaching-law sliding-mode control method can accurately track the command signal and promote system stability and robustness in the treatment of nonlinear systems characterized by parametric uncertainty and outside interference.
near-space vehicle; tracking control; climbing mode; dual exponential reaching law; sliding mode control; parametric uncertainty; Lyapunov stability theory
2015-03-18.
日期:2016-04-14.
国家自然科学基金项目(61304223);教育部高等学校博士学科点专项科研基金项目(20123218120015);南京航空航天大学研究生创新基地(实验室)开发基金项目(kfjj201420).
顾臣风(1990-),男,硕士研究生; 江驹(1963-),男,教授,博士生导师,博士.
顾臣风,E-mail: gcfunny@163.com.
10.11990/jheu.201503056
V249
A
1006-7043(2016) 11-1526-06
顾臣风,江驹,吴雨珊. 近空间飞行器爬升段跟踪控制[J]. 哈尔滨工程大学学报, 2016, 37(11): 1526-1531. GU Chenfeng, JIANG Ju, WU Yushan. Tracking control for a near-space vehicle in the ascent phase[J]. Journal of Harbin Engineering University, 2016, 37(11): 1526-1531..
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160414.1415.002.html
