汽车自动巡航控制系统控制策略与仿真
2016-12-07余黄军任传喜
余黄军,张 昕,任传喜
(1.沈阳理工大学 汽车与交通学院,沈阳 110159; 2.上汽通用(沈阳)北盛汽车有限公司,沈阳 110044)
汽车自动巡航控制系统控制策略与仿真
余黄军1,张 昕1,任传喜2
(1.沈阳理工大学 汽车与交通学院,沈阳 110159; 2.上汽通用(沈阳)北盛汽车有限公司,沈阳 110044)
提出一种基于PID控制器实现定速模式、模糊控制器实现跟车模式的自动巡航控制策略。该控制方法使用不同的控制器控制两种巡航模式,保留了两种控制器的优点,又避免了单一控制系统控制品质的下降,并利用Matlab/Simulink软件建立汽车纵向动力学、发动机和控制器模型。仿真结果表明所设计的控制系统具有可行性和有效性。
自动巡航;纵向动力学模型;发动机模型;仿真
汽车自动巡航控制系统属于主动安全技术,近些年来在汽车尤其是高档汽车中的应用越来越广泛,它能根据车辆当前行驶状况和道路环境变化,实时控制自车与前车之间的相对车距和相对速度以匹配车流,有效地减轻了驾驶员在驾驶过程中的操作负担,提高了道路的流通性,改善了车辆行驶的舒适性和安全性。
对于自动巡航控制系统,以往的研究者已经进行了大量的探索,提出了多种多样的控制思路,例如:基于PID控制算法的研究[1]、基于模糊PID控制算法的研究[2]、基于神经网络模糊控制算法的研究[3]等。但是研究后发现面对复杂多变的车辆行驶环境,单一控制算法制作的控制器不能完美的实现所有的车辆工作模式,在某些行驶模式下控制效果非常理想,一旦切换到另一些模式时就会出现速度波动大、反映时间长、误差增大等控制品质明显下降的问题。本文提出一种基于PID控制器实现定速模式、模糊控制器实现跟车模式的自动巡航控制策略。
1 自动巡航的工作原理
自动巡航控制系统又叫ACC(Automatic Cruise Control),是一种20世纪90年代中期发展起来的辅助驾驶系统[4],它将汽车定速巡航控制系统和跟车巡航控制系统有机的结合起来,既有巡航控制功能,又有防止前向撞击功能。ACC系统主要使用在高速公路、宽路面的远程道路和乡间道路行驶的汽车上。
ACC系统最基本的组成部分是雷达传感器和电子控制单元(控制器)。雷达传感器用以探测主车前方的目标车辆,并向电控单元提供主车与目标车辆间的相对速度、相对距离、相对方位角度等信息。电控单元根据驾驶员所设定的安全车距及巡航行驶速度,结合雷达传送来的信息调整主车的行驶状态。
定速巡航是指控制单元按照驾驶员设定的巡航速度控制车辆匀速行驶。当主车行驶前方出现目标车辆,且目标车辆的速度低于主车设定的速度时,为防止两车相撞且保持安全车距,电控单元将定速模式切换到跟车模式,使主车车速降到理想目标值后跟随前方目标车辆行驶,与目标车辆以相同的速度行驶。当前方的目标车辆发生移线或本车移线行驶使得本车前方又无行驶车辆时,对本车进行加速控制,使本车恢复到设定速度后匀速行驶。当驾驶员参与车辆驾驶后ACC系统将自动退出对车辆的控制[5]。
2 车辆各部分模型的建立
2.1 汽车纵向动力学模型
ACC系统主要控制车辆的纵向运动,车辆的行驶阻力由滚动阻力Ff、空气阻力Fa、坡度阻力Fi和加速阻力Fj组成[6]。当车辆稳态行驶时,车辆的驱动力Ft和行驶阻力之和达到平衡状态。
Ft=Ff+Fa+Fi+Fj
(1)
1)驱动力模型
(2)
式中:Ttq为发动机输出转矩,N·m;i0为主减速器传动比;ig为变速器传动比;ηt为传动系机械效率;r为车轮半径,m。
2)滚动阻力模型
Ff=Gf
(3)

3)空气阻力模型
(4)
式中:CD为空气阻力系数;A为汽车迎风面积,m2。
4)坡度阻力模型
Fi=Gsinα
(5)
式中,α为坡道角度,i为坡度。
由于α较小,故sinα≈tanα=i;因此Fi=Gi。
5)加速阻力
(6)
式中:δ为汽车旋转质量转换系数,δ>1;m为汽车质量,kg。
6)建立汽车纵向动力学模型
由车辆平衡方程式可得
(7)
转换公式后可得速度表达式:
(8)
由此表达式建立汽车纵向动力学模型如图1所示。输入为车辆的驱动力Ft,输出为车辆速度v。
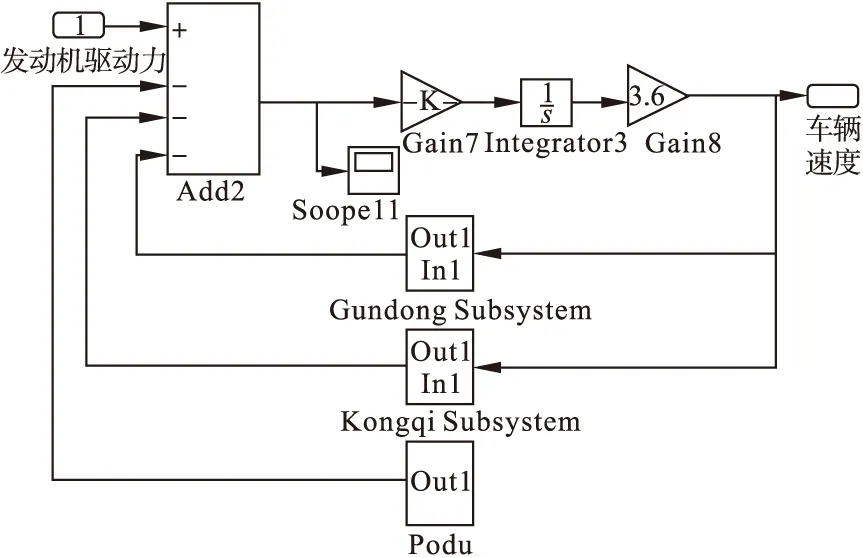
图1 汽车纵向动力学模型
2.2 发动机模型
发动机是汽车的动力核心,本设计为达到贴近实际的控制效果添加了发动机模块。当电控单元接收到速度和距离传感器传送来的信号后,通过运算输出一个控制量,这个控制量将会调整发动机节气门开度,同时发动机输出扭矩也将随之改变,改变后的扭矩传递至汽车纵向动力学模型,最后通过纵向动力学模型展现控制效果。由于发动机的工作负载是动态的,运行工况处于不稳定状态,因此很难以比较准确的数学模型将这种动态的工况表达出来,所以一般都是在发动机稳态试验数据的基础上采用数表或公式拟合的方法来建立发动机稳态模型[7]。
根据GT-power中模拟发动机运行得到的发动机实验数据,在Simulink仿真环境中可以调用Look-up table查表模块来表示发动机扭矩、节气门开度和发动机转速三者之间的关系,如图2所示。
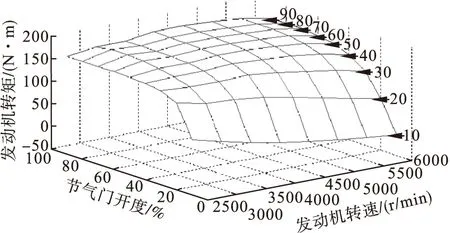
图2 发动机转矩特性图
根据发动机转速与发动机输出力矩之间的关系:
Jβ=Ttq-Tp
(9)
式中:J为发动机有效转动惯量,kg·m2;β为发动机角加速度,rad/s2;Ttq为发动机动态输出扭矩,N·m;Tp为液力变矩器的泵轮扭矩,N·m。
在Simulink中建立的发动机模型,如图3所示。输入为节气门开度a及液力变矩器的泵轮扭矩Tp;输出为发动机角速度ω和发动机动态输出扭矩Ttq。
2.3 自动巡航控制器的选择
汽车自动巡航一般分为两种工作模式:定速巡航和跟车巡航。目前的自动巡航控制器多为单一型,即一种控制器控制多种工作模式,现提出一种基于PID控制器实现定速巡航、模糊控制器实现跟车巡航的控制算法。

图3 发动机模型框图
1)PID控制器模型
PID(比例、积分、微分)控制作为最早发展起来的控制策略在工业控制中得到了广泛的应用,它具有结构简单、可靠性好、参数易于整定等优点[8]。PID控制的原理图如图4所示。
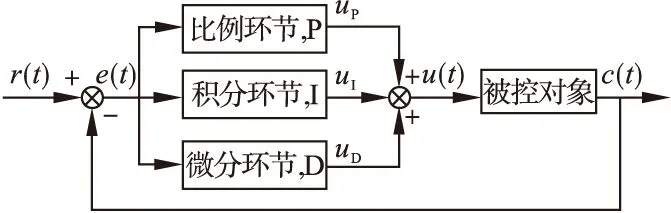
图4 PID控制原理图
简单说来,PID控制各校正环节的作用如下:
(1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数,时间常数越大,积分作用越弱,反之则越强。
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变化太多之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间[9]。
本设计选定PID控制器来实现车辆的定速巡航功能,建立的控制器模型如图5所示。输入为设定巡航速度,输出为车辆实际速度。
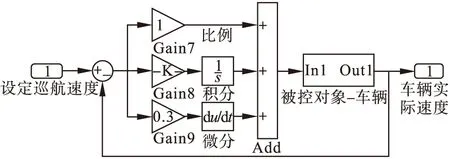
图5 PID控制系统模型框图
2)模糊控制器模型
跟车巡航模式控制的是处在跟随行驶车况下的前后车辆的相对距离,使其满足安全车距要求,从而既能保证行车安全,又能减小相隔距离,提高道路的利用率。然而现代汽车的行驶环境是个复杂的非线性系统,且受外界的影响特别大,一些研究发现,想要建立一个精确的跟车巡航模型几乎难以实现,同时也发现在实际车辆行驶过程中,有经验的司机总是可以很好地控制自己的车辆跟随目标车辆安全行驶。
模糊控制系统是以模糊集合化、模糊语言以及模糊逻辑推理为基础的一种计算机控制系统。从线性与非线性的控制角度分类,模糊控制系统是一种非线性控制;从控制器的智能性看,模糊控制属于智能控制的范畴。模糊控制器主要由模糊化接口、知识库、模糊推理机、解模糊接口四部分组成[10],其基本结构如图6所示。

图6 模糊控制器的基本结构
本设计选定模糊控制器来实现车辆的跟车巡航功能。
选取设定安全车距与实际车距的偏差e与偏差的变化率ec作为控制器输入,经模糊推理后的解模糊输出为油门开度变化Δθ。各量的模糊集均为{NB,NM,NS,ZO,PS,PM,PB},分别表示负大、负中、负小、零、正小、正中、正大。输入量车距的论域为{-150,150},车距变化率的论域为{-8,8},输出论域为{-20,20}。
总结人们驾驶的经验,得到如下控制规则:
If 距离误差为ZO and距离变化率为ZO then油门开度变化为ZO;
If 距离误差为 PB and距离变化率为PB then油门开度变化为NB;
If 距离误差为NB and距离变化率为NB then油门开度变化为PB;
…… ……
由上述模糊控制算法建立的控制模型如图7所示。
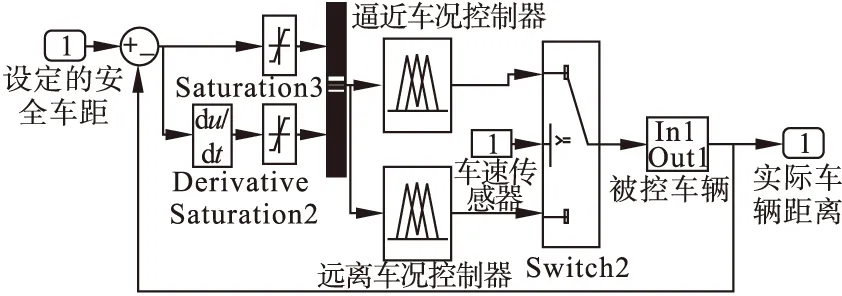
图7 模糊控制系统模型框图
3 系统仿真结果
本设计利用Matlab/Simulink软件进行汽车自动巡航控制系统的仿真,系统仿真如图8、图9所示。具体参数选取如下:
定速巡航:主车巡航速度设为90km/h,500ms后因行驶车况或其他原因需要修改巡航速度至72km/h。
跟车巡航:安全车距设为150m,主车巡航速度设为20m/s,200ms后遇到速度为18m/s的目标车辆,400ms时目标车辆:1)加速到22m/s;2)减速至16m/s。

图8 定速巡航仿真模型

图9 跟车巡航仿真模型
3.1 定速巡航仿真结果分析
如图10所示,0~300ms阶段,车辆从静止启动到加速至稳定的90km/h巡航速度;500ms时由于巡航目标速度的变化,控制器迅速地改变车辆速度降至稳定的72km/h,只需要50ms。从仿真结果来看,PID定速巡航模式可以快速、稳定的达到巡航速度要求,及时满足不同的速度变化需要。
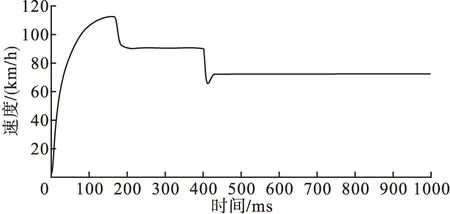
图10 定速巡航速度控制
3.2 跟车巡航仿真结果分析
如图11所示,0~200ms阶段,主车辆以20m/s的速度稳定向前行驶;200ms时在主车前进方向遇到以18m/s速度稳定行驶的目标车辆,车载电脑迅速判断车况,切换至跟车模式,同时模糊控制器及时接管车辆控制,250ms时成功将主车速度迅速降至目标车辆速度18m/s;400ms时目标车辆突然加速至22m/s或减速至16m/s,主车控制器都能迅速反应,控制车辆加速或减速至目标车辆速度。图11a所示加速控制时稳定控制需要250ms;图11b所示减速控制时只需要180ms。为防止追尾,无论车辆加速还是减速,控制器都能将两车的车距一直维持在安全车距150m左右,完成了跟随目标车辆的安全控制,如图12所示。

图11 跟车巡航两车速度
从仿真结果来看,模糊跟车巡航模式可以在有效判定目标车辆的速度和车距变化的前提下,准确、快速的实现主车的速度控制和车辆间的车距控制。
上述仿真结果分析表明本次设计的控制系统具有可行性和有效性。
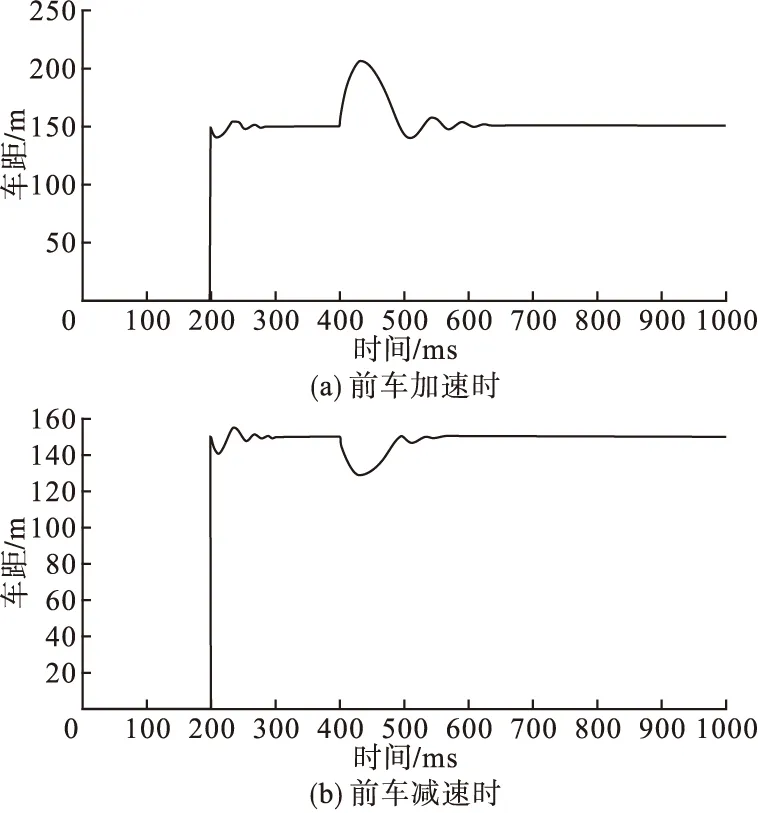
图12 跟车巡航两车车距
4 结束语
提出了基于PID控制器实现定速模式、模糊控制器实现跟车模式的自动巡航控制系统控制策略,仿真结果表明,两种控制器在各自的控制部分都显示了良好的控制效果,有效实现了车辆在一定误差范围内的稳定行驶,既保留了两种控制器的优点,又改善了单一控制系统的控制效果。该控制策略方法简单、算法成熟、易于实现,可以减轻长时间驾驶旅途中驾驶员的劳动强度,具有一定的实用价值。
[1]王春蕾,周美娇,易淑友.汽车自动巡航系统PID控制策略的研究[J].电子技术,2012(10):92-95.
[2]仇成群,刘成林,沈法华,等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012,28(6):197-201.
[3]张志远,万沛霖.汽车自动巡航系统智能控制策略[J].辽宁工程技术大学学报,2006(2):234-237.
[4]魏春源.汽车安全性与舒适性系统[M].北京:北京理工大学出版社,2007:155-198.
[5]魏秋兰,刘玉清.自适应巡航系统在汽车中的应用[J].农业装备与车辆,2009(6):57-61.
[6]余志生.汽车理论[M].第5版.北京:机械工业出版社,2009:2-22.
[7]刘洪玮.汽车自适应巡航控制系统的研究[D].上海:东华大学,2010.
[8]夏玮,李朝晖,常春藤,等.MATLAB控制系统仿真与实例详解[M].北京:人民邮电出版社,2008:262-263.
[9]朱丽丽,赵秀春.汽车自动巡航系统的PID控制[J].科技信息,2009(34):767.
[10]刘中海,自适应巡航控制系统设计与仿真[D].北京:清华大学,2005.
(责任编辑:赵丽琴)
The Control Strategy and Simulation of Automobile Automatic Cruise Control System
YU Huangjun1,ZHANG Xin1,REN Chuanxi2
(1.Shenyang Ligong University,Shenyang 110159,China; 2.SAIC GM (Shenyang) NorSom Motors Co.,Ltd.,Shenyang 110044,China)
A kind of automatic cruise control strategy is put forward by PID controller and fuzzy controller,which realizes a constant speed mode and a car following model.This control method uses different way to control two cruise modes,which not only retains both the advantages of the two kinds of controller,but also effectively avoids the single control system to decline control quality.And Matlab/Simulink software is adopted to establish vehicle longitudinal dynamics model,engine model and controller model.Simulation results show that the designed control system has good feasibility and effectiveness.
cruise control;longitudinal dynamics model;engine model;Simulation
2015-06-08
余黄军(1989—),男,硕士研究生;通讯作者:张昕(1977—),女,副教授,研究方向:汽车电子控制。
1003-1251(2016)04-0056-06
U461.6
A
