基于ADS影像航测内业制图研究
2016-12-06许懿娜
许懿娜 王 义
(中铁二院工程集团有限责任公司,四川成都 610031)
基于ADS影像航测内业制图研究
许懿娜 王 义
(中铁二院工程集团有限责任公司,四川成都 610031)
渝昆铁路航空摄影采用目前先进的推扫式机载数字摄影测量系统ADS80,但影像存在原始格式不开放、传统空三方法不适用、立体测图软件不识别等多个技术难点,无法按照传统内业制图流程开展测图工作。选择渝昆线宜宾段某测段数据进行研究,制定了一套针对ADS数据内业制图的技术流程,经外业控制点检验,能够满足1∶2 000制图精度。
长条带 空三加密 立体测图
ADS80机载数字航空摄影测量系统是世界上唯一提供子像元级别精度数据的宽幅面数字摄影测量系统,一次飞行就可以同时获取前视、下视和后视,具有100%三度重叠、联系无缝的立体影像。由于集成了高精度的IMU和GPS,通过少量控制点即可控制整个测区,可大大减少外业工作量。摄影距离长,各影像间内符合精度好,空三效率高,特别适合铁路条带状制图需求。然而,针对ADS数据,面临原始数据格式无法解析、传统空三方式不适用于条带影像、立体测图软件不支持条带影像等问题,若要应用于工程,亟需解决这些问题。
渝昆铁路为重庆至昆明间的新建高速铁路,是我国西南地区的重要铁路干线,也是西南地区与西北地区客运通道的重要组成部分。渝昆铁路宜宾段选择使用ADS摄影,条带长约55 km,像幅为2.4 km。选择其中1个测段进行ADS影像航测内业制图研究工作,旨在探索能够满足铁路工程制图要求的作业流程。
1 ADS影像内业制图技术流程
ADS内业制图技术流程如图1所示。
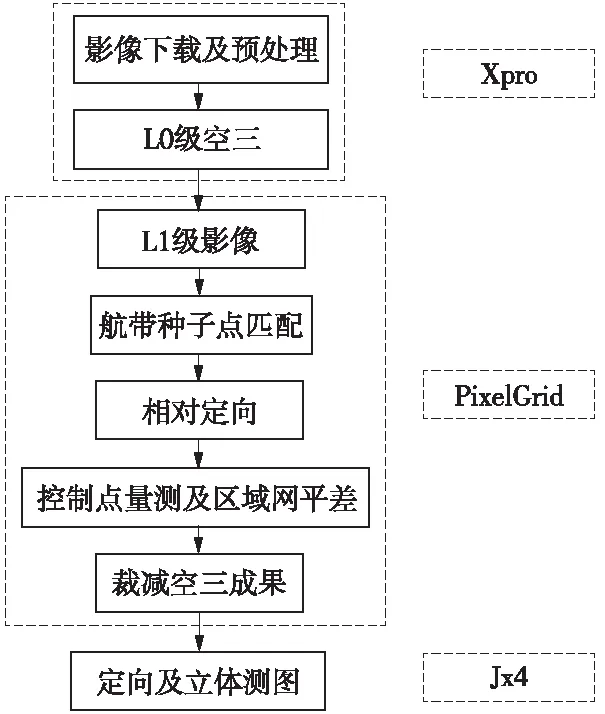
图1 ADS航测内业制图流程
1.1 L0级影像预处理及空三
ADS影像原始格式L0级影像为RAW格式,Leica公司并未开放该格式,当前主流图像处理软件均无法处理,需要Leica配套ADS设备的Xpro或Gpro软件首先完成原始L0级影像下载转换,过程中可利用Ipas软件下载15 d后的精密星历数据,增加地理定位精度。
L0转换为L1级影像需要进行初步空三。利用Xpro打开飞行测区,引入飞行航线,建立工程文件,设置匹配策略,进行自动点匹配。匹配结束后进行空三解算,自动运行Orima-DP模块,剔除匹配错误点。如果由于飞行原因影像质量不好,部分区域缺点,可以人工加点使匹配通过。通过反复剔除粗差点,使sigma值满足精度要求。完成后输出L1级影像,但Xpro软件空三无法在立体环境下量测地面控制点,不能确保满足工程制图需求,故后期使用PixelGrid软件进行主要的空三加密工作(如图2)。
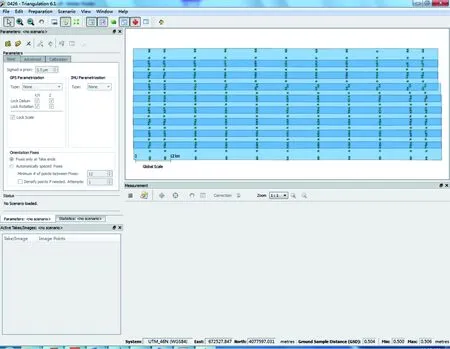
图2 Xpro影像下载及空三加密
1.2 空三加密
仅基于Xpro加密无法立体量测控制点,达不到测制1∶2 000地形图精度要求。PixelGrid软件能够基于Gpro输出的L1级影像进行自动连接点量测、立体环境下人机交互地面控制点量测。选择PixelGrid软件进行L1级影像空三加密工作,具体流程如下。
(1)工程设置
设置ADS加密工程,关键点在于设置航线及坐标系。PixelGrid软件通过*.sup文件添加航线,14A、02A、27A分别为一条航线前、中、后影像,选择同一航带三副影像后完成航线设置;渝昆线坐标系为国家2000坐标系35带,PixelGrid软件默认加上带号,后期加入控制点时需注意将东坐标前添加带号。工程设置界面如图3。
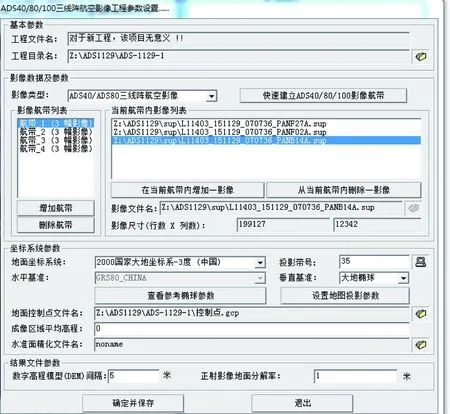
图3 PixelGrid工程设置
(2)影像转换及种子点匹配
通过影像格式转换完成影像预处理及金字塔生成工作,为后期空三准备工作。ADS影像条带较长,前、中、后视影像需要选取种子点预先进行匹配,类似传统航片加密中的航带间偏移量选取,使后面相对定向更容易找到航带间连接点。种子点约9 000像素选取一个,通过在三视影像中选取同名点实现(如图4)。
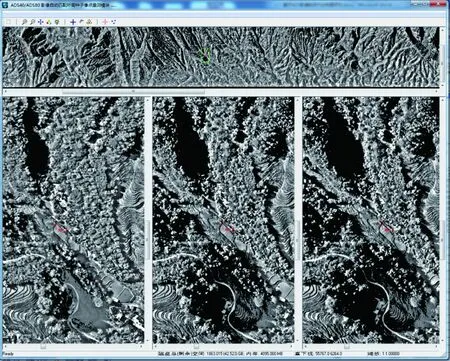
图4 种子点匹配
(3)自动相对定向
三视影像种子点量测完成后即可自动进行相对定向,匹配航带间与航带内连接点。
(4)量测地面控制点
相对定向完成后即可人工量测地面控制点,PixelGrid软件能够直接先将所有控制点预计算,通过选择每条航线,量取带“++++++”的点即可,无需人工逐点寻找位置(如图5)。
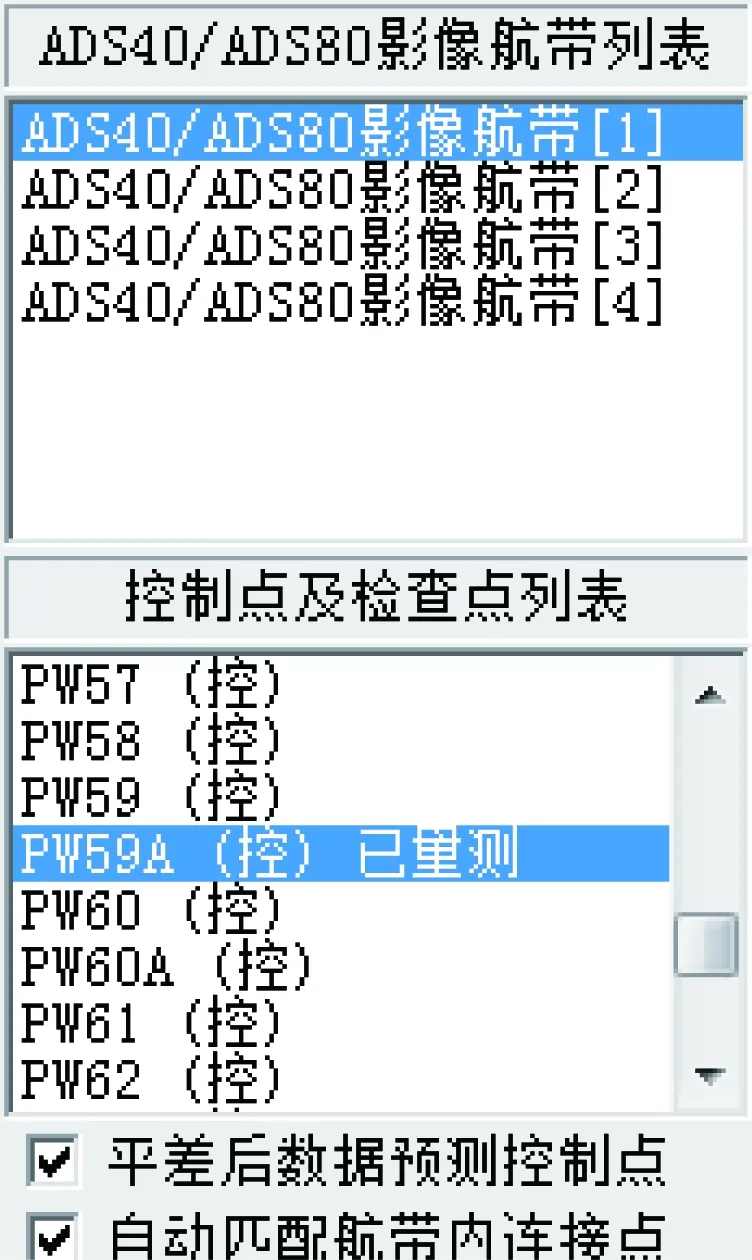
图5 控制点量测
图6中绿色圆点为航带间连接点,红色圆点为航带内连接点,绿色三角点为地面控制点,由图6可看出,连接点及控制点匹配效果较好,布满测区且分布均匀。

图6 控制点及连接点分布
(5)区域网平差
PixelGrid软件通过连接点和地面控制点进行测区区域网平差。针对渝昆线,首先“预先检查控制点残差”,在上方区域会出现控制点残差情况,双击可直接进入立体量测窗口,此时可调整控制点。根据航测相关规范,满足1∶2 000制图需确保所有控制点残差在1 m以内。其后,通过“拉格朗日多项式定向法”进行区域网平差,软件自动按照平差残差将点号排序,删除残差大的相对定向点,反复平差,直到单位权中误差为1/2像素左右。同时,控制点和连接点数量应足够,以免删除点过多导致连接不好(如图7)。
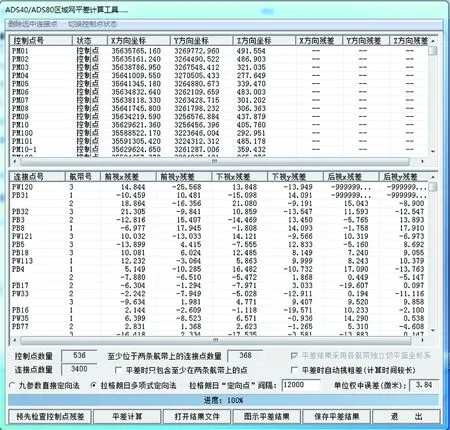
图7 区域网平差
(6)输出加密成果
当前使用的JX4测图软件无法处理条带影像,需要将区域平差通过后影像裁剪为传统航片大小,并通过PS等软件从16 bit降位为8 bit,供后期测图使用(如图8)。

图8 裁减空三成果
1.3 定向及立体测图
JX4测图软件能够直接选择对“ADS数据”进行定向,但主流方式均是通过导入Orima工程或者像素工厂工程进行。针对PixelGrid空三成果,需要对文件进行组织,JX4软件才可识别。
cam文件夹:相机文件;images文件夹:ads裁减后像对;odf文件夹:裁减后的空三成果;在同级目录下将原始“*.sup”文件拷入。
定向时设置投影参数后即可完成定向,与传统影像相比,定向速度很快,效率大大提高(如图9)。
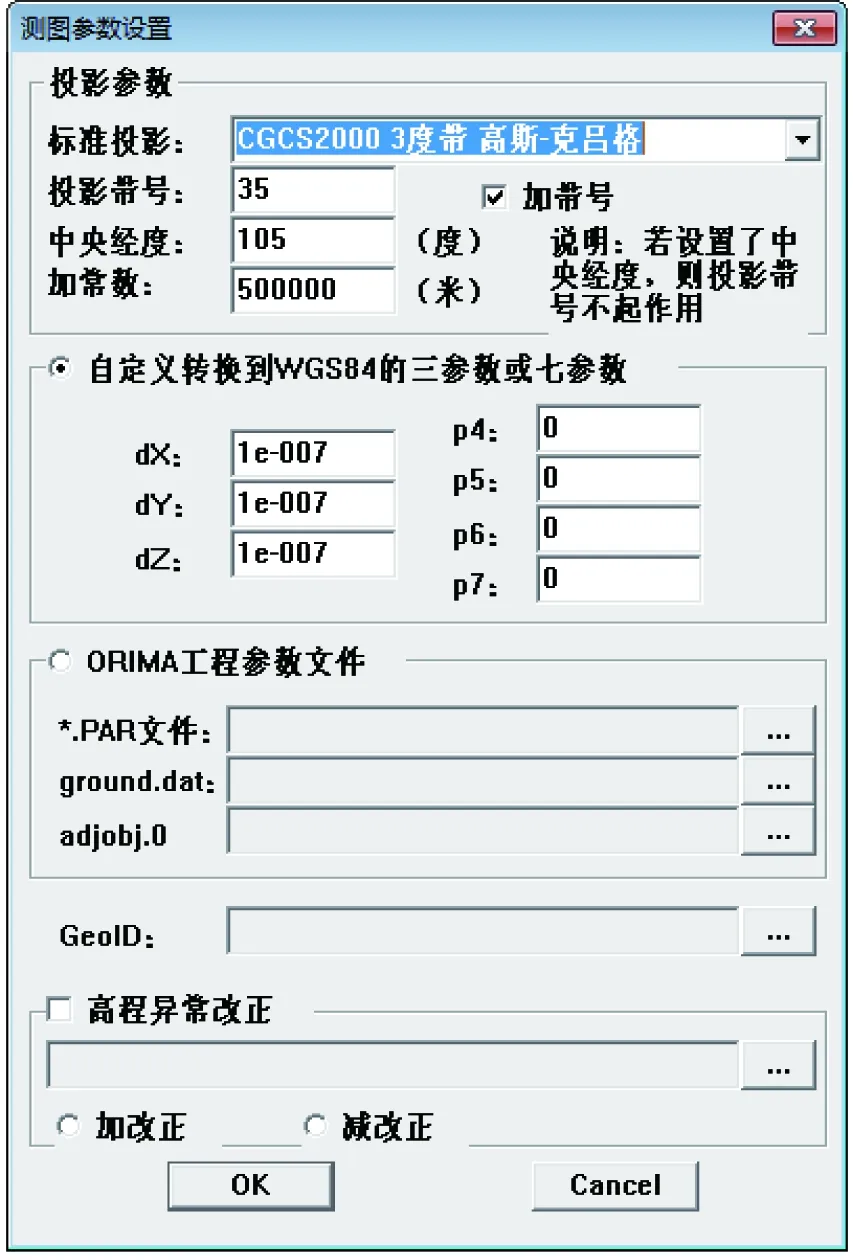
图9 JX4定向设置
2 精度分析
精度分析如表1、表2所示。
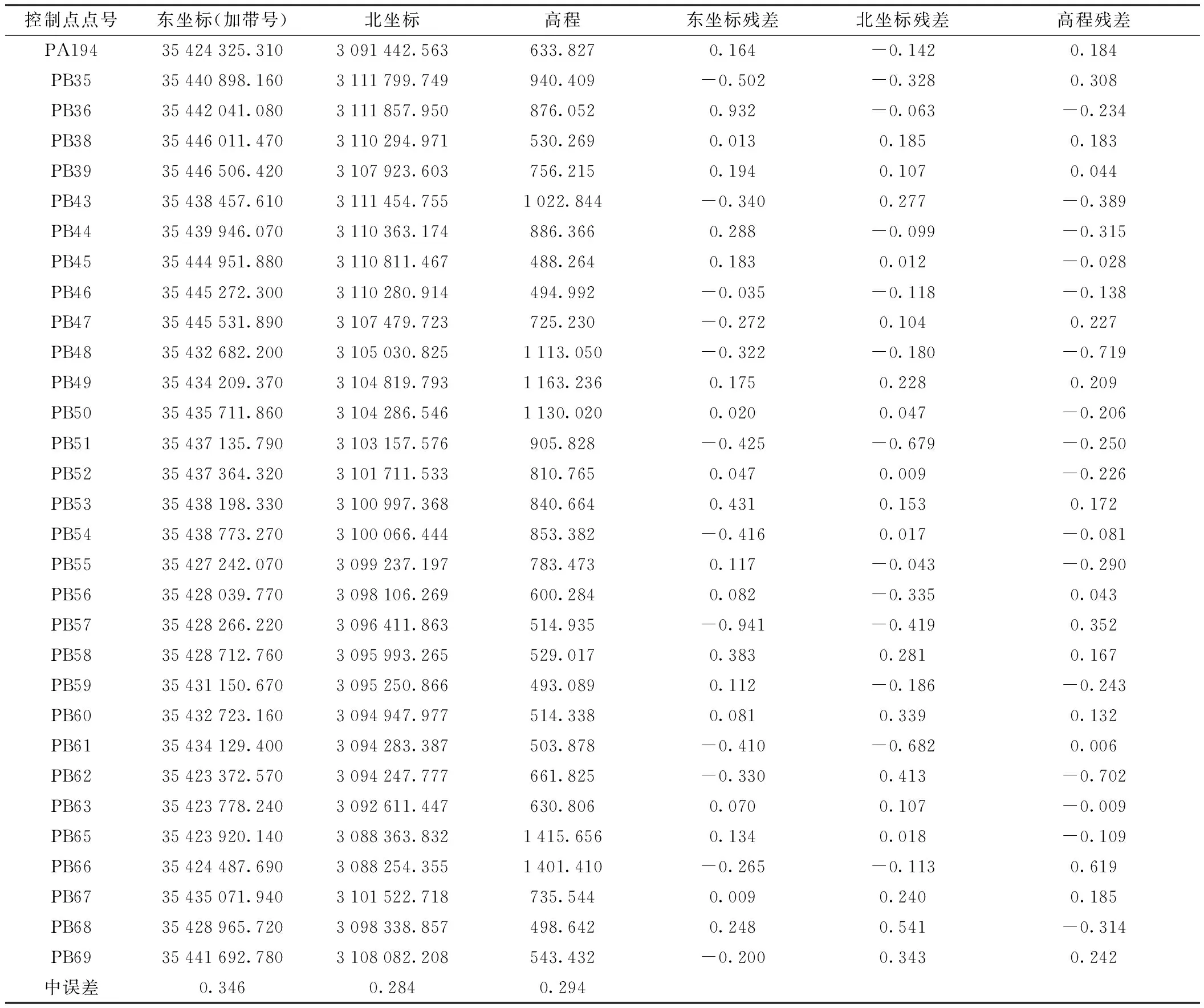
表1 控制点残差统计 m
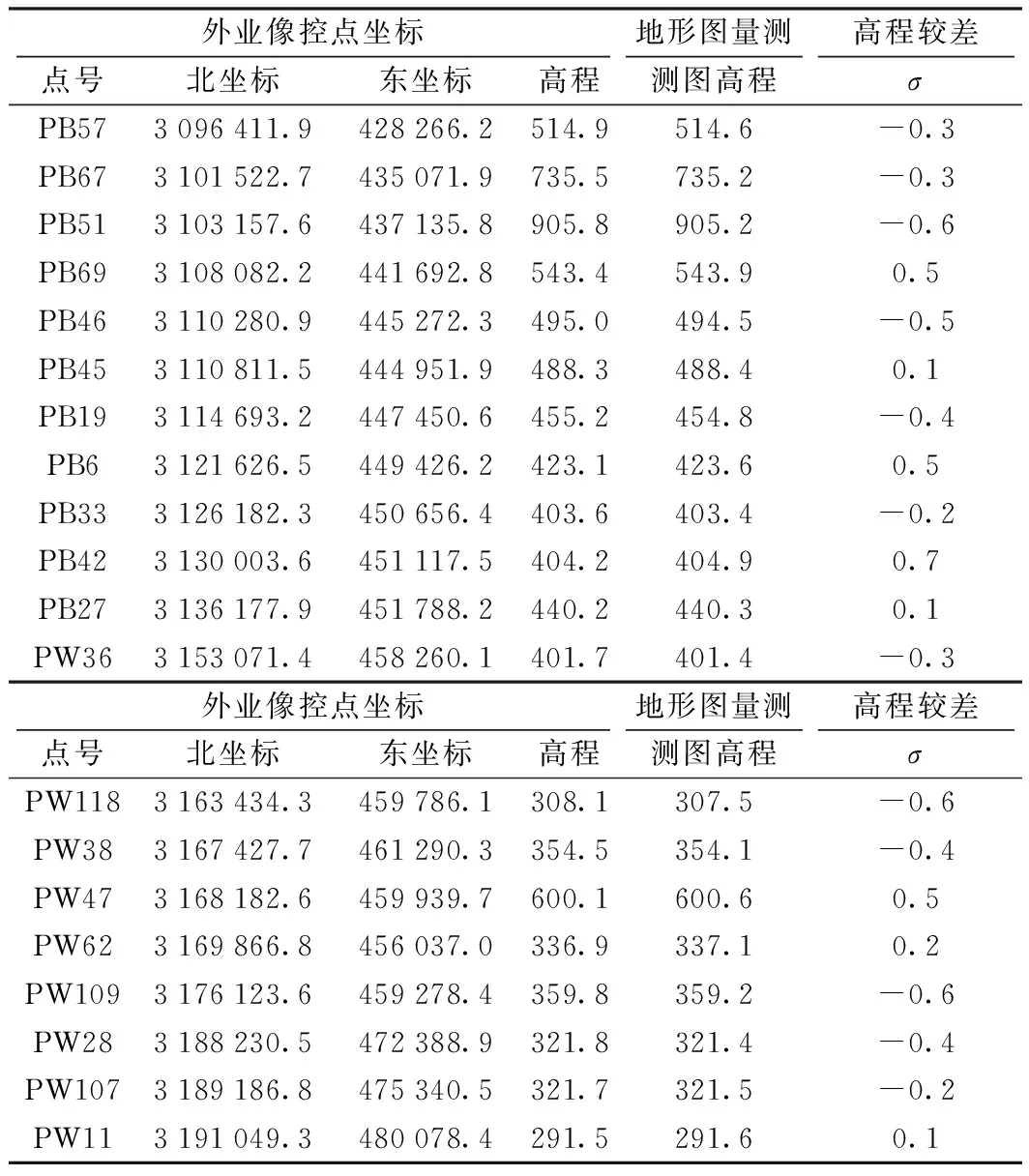
表2 外业像控点坐标与地形图高程比较 m
根据表1、表2统计的精度,并结合前期测制的重叠区域地形图验证,接边精度均在1.2 m以内,验证了ADS80数据通过少量外业像控点进行空三加密工作,可以满足测制1∶2 000地形图精度。
3 结论
ADS航摄像幅长、条带宽,一次飞行覆盖范围大,影像内部相对精度高,可通过下载精密星历数据帮助定位,定位精度高。所研究的作业流程,能够完成ADS影像铁路工程制图工作。经过精度统计,少量外控即可满足1∶2 000制图精度要求,且数据实用性和处理效率高,值得推广应用。
[1] 郑福海,曲平,姜淼,等.ADS80数码航摄仪L0级影像后处理试验[J].地理信息世界,2012(10):75-80
[2] 李力.ADS80数码影像空三加密方法的应用研究[J].测绘通报,2013(增刊):64-68
[3] 曹正响.ADS80数码影像空三加密流程介绍及问题探讨[J].地理空间信息,2012(4):26-28
[4] 张森. ADS80数字航空摄影测量立体测图高程精度分析[J].测绘与空间地理信息,2012(增刊)
[5] 朱巧云,李琼,傅晓俊.航空三线阵ADS80正射影像快速生成方法研究[J].测绘地理信息,2013(2):51-53
[6] 程敏.基于ADS80的4D产品快速生产关键技术研究[J].测绘与空间地理信息,2014(2):139-141
[7] 李英利,高晖,牛芝香.基于JX4系统实现ADS80三线阵立体影像定向建模方法[J].测绘标准化,2013(29):39-40
[8] 许大力.徕卡ADS80 数字航空摄影测量系统在大比例尺地形图航测工程中的应用[J].中国科技信息,2011(8):50,53
[9] 杨爱玲,毛键,薛莹.浅议基于XPRO系统的ADS80影像处理技术[J].测绘与空间地理信息,2013(5):78-80
Discussion on the Method of Vector Data Registration Based on ADS
XU Yina WANG Yi
2016-07-17
许懿娜(1985—),女,2010年毕业于西南交通大学地图制图学与地理信息工程专业,工学学士,工程师。
1672-7479(2016)05-0034-04
P231.5
A