洞内自由测站边角交会法代替交叉导线测量CPⅡ控制网的精度分析
2016-12-06赵梦杰
赵梦杰
(铁道第三勘察设计院集团有限公司,天津 300142)
洞内自由测站边角交会法代替交叉导线测量CPⅡ控制网的精度分析
赵梦杰
(铁道第三勘察设计院集团有限公司,天津 300142)
通过对洞内自由测站边角交会法外业观测方法的研究和对实测数据严密平差计算后各项精度指标的对比分析,认为其较隧道交叉导线测量有图形强度大、多余观测量多、对中误差微小、无旁折光影响等优势,外业观测精度及平差计算后各项主要精度指标均可达到《高速铁路工程测量规范》中相应等级导线网的精度要求,从而证明利用自由测站边角交会代替交叉导线进行隧道洞内CPⅡ控制网测量可行,这一研究结论可为后续研究及规范的完善提供基础资料。
自由测站边角交会 交叉导线 精度分析 隧道
高铁隧道洞内CPⅡ控制网测量的主要目的是:(1)建立线路平面控制网,为轨道控制网(以下简称CPⅢ控制网)提供控制基准;(2)用以检查隧道的贯通情况,检查贯通后隧道的净空是否满足设计要求,保证现场施工结构物不侵限。目前隧道洞内CPⅡ控制网测量多采用交叉导线形式,相比自由测站边角交会法其多余观测量少,受旁折光影响大,并存在对中误差以及点位精度不均匀等不足,以上都是影响隧道内CPⅡ控制点点位误差的主要因素。自由测站边角交会网采用自由测站方式自动观测,测站位置的选择灵活多变,自动观测的精度和效率高,且洞内自由测站边角交会网的控制点可用于CPⅢ控制网的布设以及联测,做到了一网多用。借鉴CPⅢ控制网的建网方式并对其控制点的纵向间距和自由测站点的间距加以改进,用以建立隧道洞内CPⅡ控制网。通过实测数据的对比分析计算,验证采用洞内自由测站边角交会法获得的观测数据,能否满足《高速铁路工程测量规范》中对隧道洞内交叉导线各项精度指标的要求,借此对该测量方式能否代替隧道洞内交叉导线的测量方式进行研究,同时也为后续科学研究提供基础资料。
1 洞内自由测站边角交会网布设方案及数据采集
CPⅢ控制网其观测方法为自由测站边角交会法,其标准的自由测站间距宜为120 m(如图1所示)。每一测站观测6对CPⅢ控制点,每一个CPⅢ点应保证被连续3个自由测站的3个方向和3个距离交会,即通过相邻测站重叠观测多个CPⅢ点,获得CPⅢ点间的强相关性,以确保相邻CPⅢ点具有较高的相对精度。其观测值包括自由测站至各CPⅢ点的斜距、水平方向观测值和天顶距观测值。

图1 标准CPⅢ平面网观测方法示意
测角误差是影响隧道横向点位误差的最大因素,所以隧道洞内自由测站边角交会的测站数不应太多,故测站距离应尽量加大以减少测站数,从而达到减小隧道横向点位误差的目的。为提高横向点位精度,隧道洞内控制点间的纵向间距应尽量大,考虑到隧道贯通后,洞内施工情况复杂,烟尘以及施工干扰巨大,故将洞内自由测站边角交会的控制点按直线段300 m,曲线段250 m的纵向间距成对布设,即每一自由测站观测相邻的8个控制点(如图2所示)。
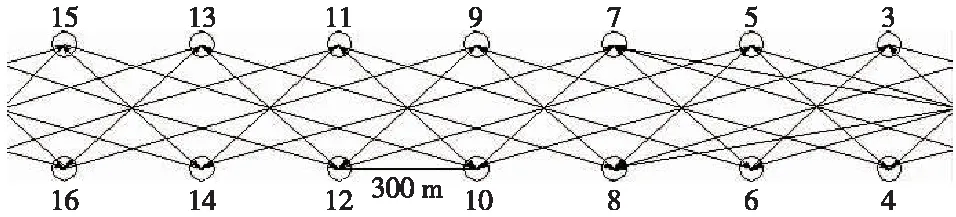
图2 洞内自由测站边角交会观测方法示意
为了分析和验证洞内自由测站边角交会代替隧道洞内交叉导线测量的可行性,于某高速铁路客运专线一长度为6.8 km的隧道内,按上述布网方式进行布网并实测数据,外业数据采集的各项精度指标满足文献[1]中关于隧道交叉导线网测量的技术要求(如表1、表2和表3所示)。

表1 自由测站边角交会水平角方向观测法的技术要求
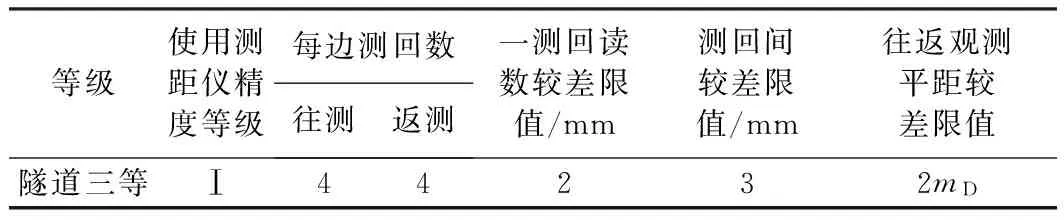
表2 自由测站边角交会边长测量技术要求

表3 自由测站边角交会网竖直角观测技术要求
2 洞内自由测站边角交会网数据处理及精度分析
目前文献[1]中未对采用自由测站边角交会法进行隧道洞内CPⅡ控制网测量的各项平差指标作出要求,故参照与本隧道线路长度相对应的三等导线网的精度指标,对采集的洞内自由测站边角交会网外业观测数据及平差处理后的数据进行研究分析,其各精度指标如表4所示。
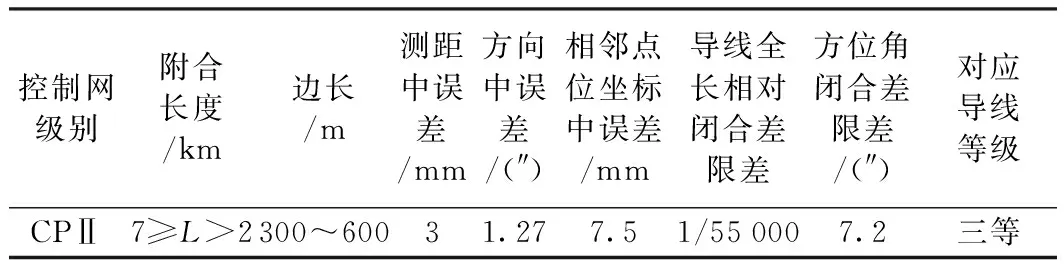
表4 隧道洞内交叉导线网测量的主要技术要求
说明:方向中误差根据测角中误差1.8″计算,方位角闭合差限差按测站数n=4计算。
2.1 洞内自由测站边角交会网边长闭合差精度分析
根据文献[4]的算法及控制网的网形,可以计算得到洞内自由测站边角交会网的边长纵、横向闭合差限差为1/33 948和1/1 230,取洞内自由测站边角交会网中控制点间纵向间距为300 m,而根据文献[9]介绍,300~350 km/h的单洞双线隧道,其隧道横断面宽度不少于12.6 m,由于控制点均布设于隧道二衬上,可认为洞内自由测站边角交会网中控制点间横向间距为12 m。考虑到隧道内的观测环境,为避免过程检查时出现弃真错误并顾及上述控制点的纵、横间距,故把其纵、横向闭合差之限差设定为1/30 000和1/1 200,即边长闭合差限差为10 mm。
自由测站边角交会网外业观测时,并没有对相邻两洞内控制点间的水平距离进行直接观测,故文献[1]中对隧道洞内交叉导线网中相邻两控制点间的边长往返测限差便不适用。然而同CPⅢ平面网一样,通过搜索自由测站边角交会网中不同测站计算获得的第三边距离进行较差计算,可以反映外业测量的精度。以下数据对比分析便参照CPⅢ平面网中的精度控制方法进行,根据上述原理对洞内自由测站边角交会网中边长闭合差进行计算并统计,如表5所示。

表5 洞内自由测站边角交会网边长闭合差情况统计
由表5可以看出:
(1)边长闭合差小于3 mm的闭合环所占比例为65.6%。同CPⅢ平面网相比,满足3 mm闭合差精度要求的数据所占比例不是很大,究其原因应该是洞内自由测站边角交会网的测量方法引起的,CPⅢ平面网中仪器至观测点的最远距离为180 m,而洞内自由测站边角交会网中仪器至最近的观测点为150 m,距离最远的观测点距离为450 m,仪器至观测点间的距离加长是导致洞内自由测站边角交会网边长闭合差偏大的主要原因。
(2)介于区间[3,5)、[5,7)和[7,9)之间的第三边较差比例相同均为10.9%,从统计数据看,边长闭合差大于3 mm的部分分布均匀且占有一定比例,结合前面分析认为,洞内自由测站边角交会网中边长闭合差大于3 mm属正常现象且满足限差10 mm的要求。
(3)超过9 mm的边长闭合差只有一处,其值为9.7 mm,满足洞内自由设站边角交会网边长闭合差限差10 mm的精度要求,故从此精度指标上证明洞内自由测站边角交会法可代替隧道内交叉导线法进行CPⅡ控制网测量。
2.2 洞内自由测站边角交会网测距精度及方向精度分析
与隧道交叉导线相比较,由于洞内自由测站边角交会网未在控制点上架设仪器,而架设仪器的位置为自由测站点且距离及方向观测均是单方向的,故不存在隧道交叉导线数据处理中的距离较差及角度闭合差检核,为此参照CPⅢ平面网中距离及方向精度的控制方法对洞内自由测站边角交会网的测距及方向精度进行统计分析,具体统计结果如表6和表7所示。

表6 洞内自由测站边角交会网距离精度情况统计
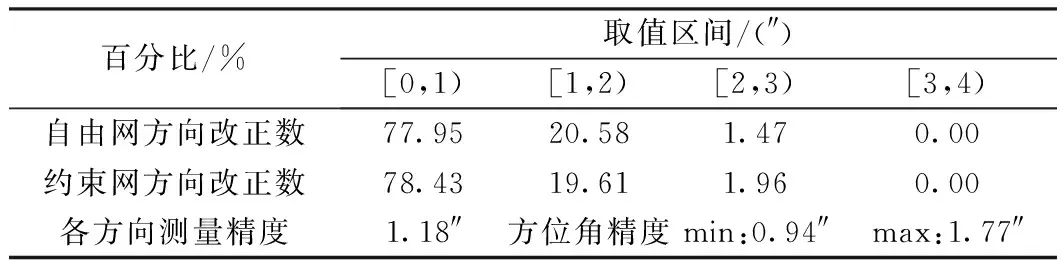
表7 洞内自由测站边角交会网方向精度情况统计
由表6、表7可以看出:
(1)无论是自由网平差还是约束网平差,距离改正数小于2 mm的情况占绝大多数比例,仅有不足1%的距离改正数(2.28 mm)超过2 mm,而方向改正数均小于3″,且方向改正数位于区间[0,2)范围内的比例占98%以上。从统计数据看,该数据距离及方向观测精度较好,同时也验证了2.1中关于洞内自由测站边角交会网中边长闭合差限差的制订是合理的。
(2)处于区间[0,0.5)范围内的距离改正数占66.18%,而处于区间[0.5,1.5)范围内的距离改正数占30.84%,由此可见由于观测距离变长,导致洞内自由测站边角交会网较正常CPⅢ平面网中距离改正数偏大。
(3)表6统计了各边长的测距精度,其值均介于区间[0.5,1.5)之内,表7统计的各观测方向精度为1.18″,此两精度指标均满足文献[1]关于测距中误差限差3 mm和方向中误差限差1.27″的精度要求,表7中统计方位角中误差最大值为1.77″,其值小于隧道交叉导线测角(方位角)中误差限差1.8″,故从以上精度指标上证明隧道洞内自由测站边角交会法可代替隧道内交叉导线测量法进行CPⅡ控制网测量。
2.3 洞内自由测站边角交会网方位角闭合差计算与分析
自由测站边角交会网观测数据中没有相邻控制点间的直接观测值,故无法像交叉导线网一样推算方位角闭合差,参照文献[7]中介绍,将整个洞内自由测站边角交会数据在隧道中间某一里程处假想一贯通面,而贯通面上一对控制点的方位角可分别由隧道进、出口已知点推算,如此推算出的方位角即有两个值,方位角的差值即是洞内自由测站边角交会网的方位角闭合差,计算公式如式(1)所示。
(1)
式中,ΔT闭合差为洞内自由测站边角交会网方位角闭合差,T进AB、T出AB分别为由隧道进、出口推算至假想贯通面上一对控制点的方位角,(X进A,Y进A)、(X进B,Y进B)和(X出A,Y出A)、(X出B,Y出B)分别为由隧道进、出口控制点推算至假想贯通面上一对控制点的独立坐标。根据上述算法,将自由测站边角交会网观测数据进行方位角闭合差计算并统计(如表8所示)。

表8 洞内自由测站边角交会网方位角闭合差计算情况统计
由表8可以看出:
假想的3处贯通面上控制点的方位角闭合差平均值为0.66″,满足文献[1]对隧道交叉导线方位角闭合差的精度要求,故从此精度指标上证明自由测站边角交会法可以代替隧道内交叉导线法进行CPⅡ控制网测量。
2.4 洞内自由测站边角交会网全长相对闭合差计算与分析
如上文所述,自由测站边角交会网中无相邻控制点间的方向和距离观测,故无法像隧道交叉导线那样计算全长相对闭合差,交叉导线全长相对闭合差计算公式如式(2)所示
(2)
式中,C为全长相对闭合差,S附合路线为导线附合路线长,一般为最短路径,fx、fy为导线坐标分量闭合差。在自由测站边角交会网中,最短附合路线为控制点经过测站点至终点的连线,从而可以将其简化理解为隧道中线里程长度,而自由测站边角交会网中的坐标分量闭合差计算方法类似于2.3中方位角闭合差的计算方法,即假想一贯通面,分别由隧道进、出口已知点推至贯通面上一对控制点的坐标差值即为其坐标分量闭合差。根据上述算法,将自由测站边角交会网观测数据的全长相对闭合差进行计算并统计(如表9所示)。

表9 洞内自由测站边角交会网全长相对闭合差计算情况统计
由表9可以看出:通过隧道进、出口已知点分别推算三处假想贯通面上6个控制点的坐标,计算得到各坐标分量闭合差,根据隧道里程长度6 814.429 8 m,可得到6处全长相对闭合差,其平均值为1/84 334,满足表2.1中文献[1]对隧道交叉导线全长相对闭合差的精度要求,故从此精度指标上证明自由测站边角交会法可以代替隧道内交叉导线法进行CPⅡ控制网测量。
2.5 洞内自由测站边角交会网数据成果对比分析
洞内自由测站边角交会网观测数据外业合格后,并经上述内业精度指标检核合格后对其进行自由网平差和约束网平差计算,约束点为隧道进、出口及斜井口已知控制点,最终将其成果与交叉导线法测量成果进行对比(如表10所示)。
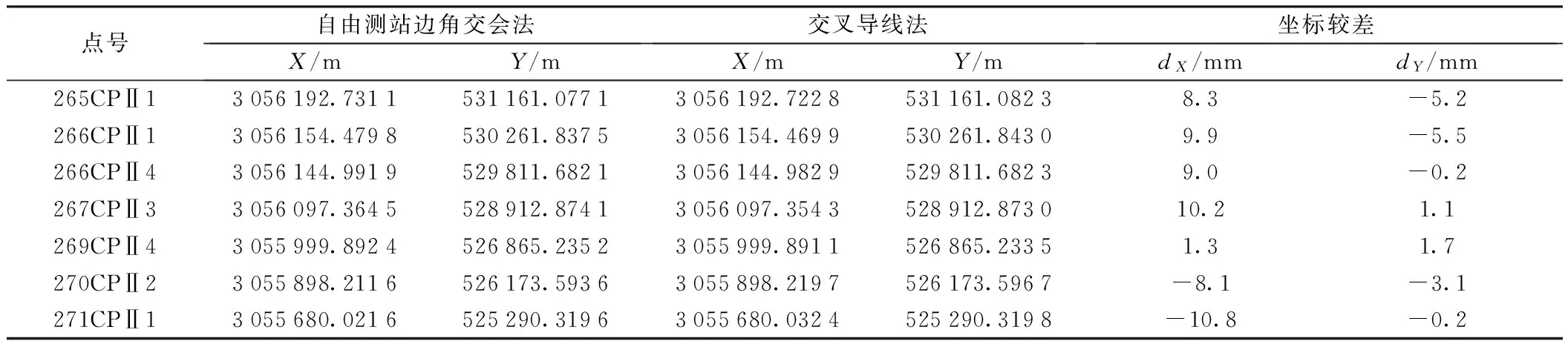
表10 洞内自由测站边角交会网数据成果对比情况统计
说明:由于坐标成果较多,本表格于每公里处选取一个控制点做对比分析,特此说明。
由表10可以看出:
(1)采用自由测站边角交会法计算的坐标成果与交叉导线法成果较差最大值为-10.8 mm,满足文献[1]中关于CPⅡ控制网复测坐标较差15 mm的限差要求,同时该网相邻点位中误差最大值为2.8 mm,满足文献[1]对隧道交叉导线相邻点位中误差的精度要求,由此证明自由测站边角交会法可以代替隧道内交叉导线法进行CPⅡ控制网测量。
(2)如同CPⅢ平面网一样,自由测站边角交会网中其点位的相对精度较高,但绝对精度稍差,然而考虑到隧道内CPⅡ控制网是将来CPⅢ平面网的起算基准,且隧道贯通后还需利用其成果检查隧道内部净空,故施工时应对隧道内CPⅡ控制网的绝对点位精度有较高要求。出于此原因的考虑,故在自由测站边角交会网数据处理时加入斜井处已知点进行约束平差,用以保证洞内自由测站边角交会网的绝对精度,至于如何界定洞内自由测站边角交会网约束区段长度与其绝对点位精度的关系,作者将另文研究。
3 结论
提出采用自由测站边角交会方式进行隧道洞内CPⅡ控制网测量的作业方法,实验数据计算及研究分析表明:洞内自由测站边角交会法代替隧道交叉导线获得的观测数据,其观测精度及平差计算后各项主要精度指标可以达到《高速铁路工程测量规范》中相应等级导线网的精度要求,证明利用自由测站边角交会法代替隧道内交叉导线进行CPⅡ控制网测量是可行的。由于自由测站边角交会法仪器自由架设且控制点采用特殊的强制归心标志,故自由测站边角交会网中对中误差微小(甚至忽略不计),控制点埋设于隧道两侧二衬上,相比现行的CPⅡ控制点布设在隧道两侧电缆槽沟顶面上,有控制点不易受施工干扰和易于保存的优点,尤为重要的是自由测站可以避免隧道侧壁的旁折光影响,这对于提升隧道内控制点点位精度非常有利。
[1] 中华人民共和国铁道部.TB10601—2009高速铁路工程测量规范[S].北京:中国铁道出版社,2009
[2] 刘成龙,金国清,杨雪峰,等.自由测站边角交会网在高铁隧道洞内平面控制中的应用研究[J].西南交通大学学报,2014,49(1):1-7
[3] 邓川.现代长大隧道洞内控制测量与监测技术研究[D].成都:西南交通大学,2012
[4] 程昂,刘成龙,徐小左.CPⅢ平面网必要点位精度的研究[J].铁道工程学报,2009(1):44-48
[5] 武汉测绘科技大学《测量学》编写组.测量学[M].北京:测绘出版社,1991
[6] 徐小左.高铁隧道洞内控制测量新方法的研究[D].成都:西南交通大学,2010
[7] 邹浜,刘成龙,王鹏,等.长大隧道洞内自由测站边角交会网平面控制测量[J].测绘科学,2014,39(10):42-47
[8] 周凌焱,刘成龙,聂松广,等.高铁隧道平面控制网横向贯通误差仿真研究[J].铁道科学与工程学报,2015,12(1):28-34
[9] 中华人民共和国铁道部.TB10621—2014高速铁路设计规范[S].北京:中国铁道出版社,2015
Precision Analysis of the Free-station Linear-angular Intersection Network Which Replace the Cross Traverse Survey of the CPⅡ Control Network in Tunnel
ZHAO Mengjie
2016-05-31
赵梦杰(1986—),男,2012年毕业于西南交通大学大地测量与测量工程专业,工学硕士,工程师。
1672-7479(2016)05-0019-04
U452.1+3
A