一种基于连接线的机载Lidar点云航带平差方法
2016-12-06程寇
程 寇
(铁道第三勘察设计院集团有限公司,天津 300142)
一种基于连接线的机载Lidar点云航带平差方法
程 寇
(铁道第三勘察设计院集团有限公司,天津 300142)
机载Lidar系统集成了激光扫描单元、POS系统等主要部件,各个测量子系统本身以及系统集成之间存在一定误差。虽然经过系统检校可消除绝大部分误差,但仍会有残余系统误差存在。误差的存在不仅影响点云数据的绝对精度,更会造成不同航带间同名特征点存在三维空间偏移,严重影响到后续数据处理和项目生产的精度。结合生产实践,提出一种基于连接线的Lidar点云航带数据平差方法,通过在航带重叠区域生成连接线来计算航带数据的系统偏移量,最终实现点云数据的精确校准。
机载激光雷达 连接线 航带平差 点云
机载Lidar系统是一个复杂的多传感器集成系统,其精度受到系统内多个组成部分的共同影响。一般而言,机载Lidar数据与其他空间数据一样,也存在粗差、随机误差和系统误差。机载Lidar数据中的粗差和随机误差主要表现为噪声点形式,可通过后处理方式予以剔除。
目前,各家Lidar设备生产厂商均提供了适合各自产品的检校方法,但通过研究发现:经过检校的点云数据中仍存在着残余系统误差,残余系统误差的存在直接影响了数据精度和后续数据处理的可靠性。通过项目生产发现,残余系统误差成为影响数据质量的一个主要因素,残余误差的消除是保证高精度机载Lidar数据后处理的前提和基础。
Lidar系统在作业过程中,由于航高和扫描视场角的限制,单条航带的点云数据只能覆盖一定的地面宽度。在线状工程中,由于线路走向以及方案的不稳定性,通常需要飞行多条航线。这种情况下,点云数据的系统误差主要体现在预处理及检校完成后,航带数据接边处存在着系统偏移。
传统航空摄影测量可通过寻找重叠区域的同名特征点,以点特征为基元,根据几何定位方程建立误差观测方程。但机载Lidar系统中,由于Lidar数据获取方式的特点以及实际地物的复杂性,从Lidar数据中自动提取高精度的连接点非常困难,目前大多采用人工选取或半自动选取的方法,但精度仍受点密度的限制。基于此,提出一种基于点云数据的自动连接线生成方法,通过重叠航带内同区域的大量连接线,建立起航带点云数据间偏移关系,以实现系统误差的消除。
1 误差源分析
机载Lidar系统中的误差主要表现为激光测距误差、硬件安置误差和数据处理误差,但在工程应用中,对最终点云成果影响较大的主要是DGPS定位误差、姿态测量误差和安置角误差。
1.1 DGPS定位误差
DGPS的定位误差是影响激光脚点精度的主要因素。GPS动态定位误差主要包括卫星轨道误差、卫星钟差、接收机钟差、多路径效应、整周模糊度求解正确与否等因素。同时,DGPS定位还受到数据获取和数据处理过程中多种因素的影响,包括:飞机转弯时半径过小导致GPS信号被遮挡造成失锁、作业时有效卫星颗数及分布、DGPS数据解算方案、地面基站分布与距离等。
1.2 安置角误差
仪器安置时产生的误差主要是指非扫描状态下,由于安装而造成的激光束偏离机下点的系统误差,即航向角误差、俯仰角误差和横滚角误差。机载Lidar系统中,IMU与激光扫描仪紧密固联,安装时尽量保证了IMU各轴和激光扫描仪系统各轴指向平行,但实际安装完毕后,IMU各轴指向均与扫描仪存在一个微小角度差。虽然在飞行过程中可进行检校场飞行予以改正,但误差很难彻底消除。
1.3 数据后处理误差
机载Lidar系统数据后处理误差主要包括时间同步误差、数据内插误差和坐标转换误差。该类误差在数据后处理过程中通过相关参数调整与优化,可使得误差逐步减小。
2 技术流程与关键技术分析
2.1 技术流程
从机载Lidar数据的特点、计算量以及工程应用的适用性上出发,提出了如图1所示的基于连接线的航带平差计算流程。

图1 机载Lidar航带平差技术流程
2.2 关键技术分析
(1)航带标识
机载Lidar项目通常都会有几十甚至上百条航线,重飞补飞等情况经常出现,导致航线分布凌乱。航带标识主要是考虑在平差过程中,同一区域会出现不同航带多层点分布的情况。平差计算前,需要首先根据GPS时间来区分每条航带,并予以编号标识。图2所示为某一项目中标识后的航线分布。
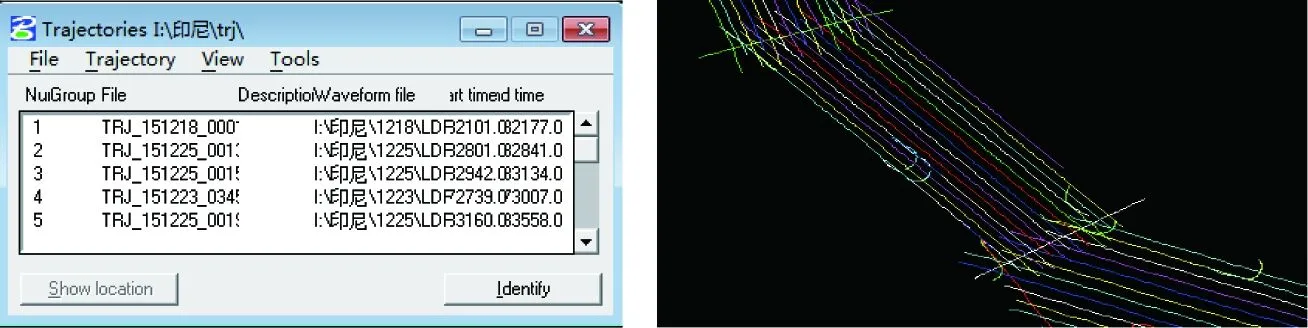
图2 航带标识与空间分布
目前,检校后的Lidar数据多为LAS1.2格式,该格式文件头中的数据项LASF_Point_Source_ID和LASF_GPS_Week_Time和LASF_GPS_Week分别记录了点数据来源和GPS时间信息,如表1所示。通过航迹文件与之对应,即可生成唯一的航带标识信息。

表1 LAS 1.2格式说明
(2)航带数据分类
航带数据分类需要以单条航带为整体进行分类,采用的是和点云数据分类时不同的策略,其目的是为了提高连接线生成的精度与可靠性,需考虑以下几个条件:
①植被区域应尽量分离出,该区域通常存在多次回波,且地表结构不可靠;
②应分离出具备较好地表反射信号的地物,如平坦地面、倾斜屋顶、墙壁等;
③分类出的表面面片应均匀分布在空间中。
(3)自动连接线生成
在机载Lidar系统中,从Lidar数据中自动提取高精度的连接点非常困难,考虑到区域内Lidar数据的相对精度较高,提出一种在航带重叠区域内自动生成连接线的方法,只对重叠区数据进行计算,可避免其它区域不必要的检索和计算,一定程度上提高了计算效率。算法具体步骤包括:
①对分类完毕的点云数据进行航迹线关联,并根据点云的空间分布建立数据分块工程。
②根据航迹线和点云的空间分布关系,自动搜索航带重叠区域。
③对整个项目进行点云精度检核,确定点云数据最大偏移阈值。
④根据地形地貌情况,设置连接线长度、搜索间距。
⑤对区域内的地面点、房屋等面片进行TIN数据构网,判断坡度和地面起伏是否满足面片要求,若无有效面片,则进行下一区域搜索。
⑥逐面片生成连接线。
⑦逐航带连接线输出。
(4)系统偏移计算
基于项目实际精度情况,选择合适的数据校准模型或传感器检校模型。地面上线性特征属性满足曲线方程的计算条件时,通过误差方程即可计算出各偏移量。
当重叠区域的高程存在差值时,通常会选择Z方向的偏移改正;当重叠区域平面、高程均存在偏移时,可同时选择Z方向和Roll、Pitch和Heading角度的改正。但在平面、高程联合改正的情况下,连接线的生成需要考虑多个方向的分布,同时需要较大的连接线密度。
在线状工程中,航带多以单航带或双航带出现。如果平差对象为两条航带,则直接对加载的数据进行平差计算;若包含多航带的测区数据,需要先对数据进行分块、分类,进行区域网航带平差计算。
3 项目应用分析
选用东南亚某国的高速铁路Lidar定测项目作为应用实例。该项目采用Leica ALS70 机载激光雷达设备进行数据获取,飞行过程中均配备了地面基站联合观测。通过POS解算、安置角检校后,输出的点云数据成果误差仍然较大,在平面和高程上均存在较大误差,如图3所示。
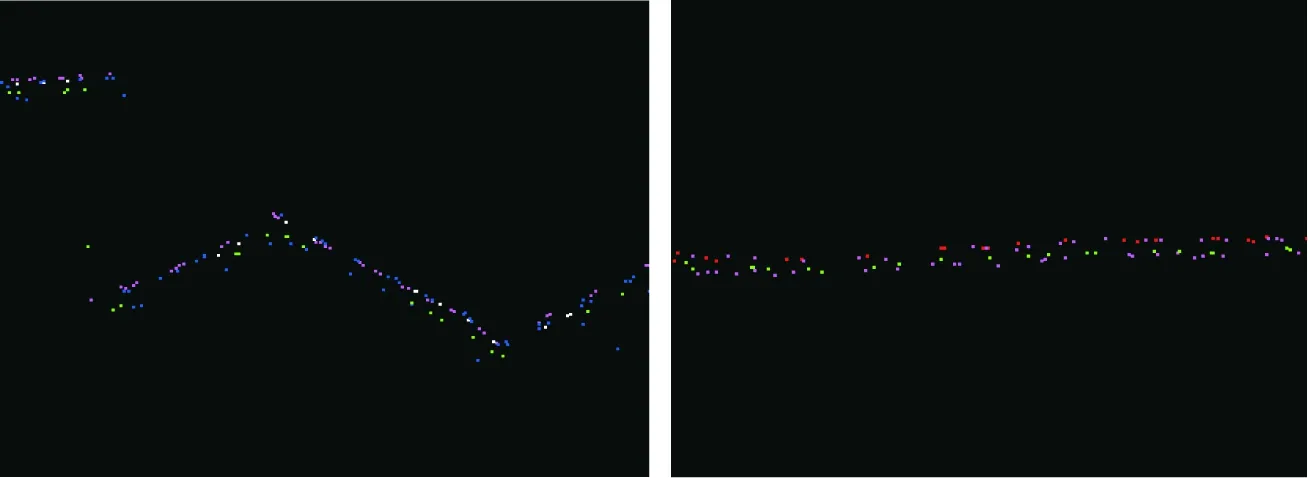
图3 系统偏移量计算结果
根据统计,该项目在重叠区内高程最大偏移量为0.6 m,平面最大偏移量为0.3 m。对整个测区建立工程,并按照图1所示的平差流程进行处理,得到最终的平差结果。
图4到图5分别为数据处理过程中航带分类结果和连接线示意。
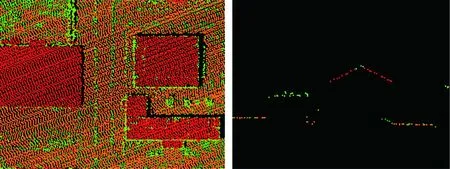
图4 航带数据分类结果
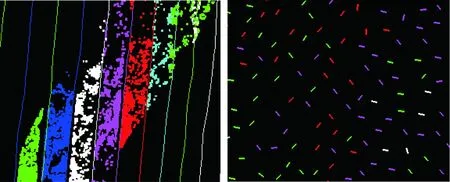
图5 连接线分布
根据点云数据误差分布情况,选择Z、Roll、Pitch和Heading角度时,计算出的偏移结果如图6所示。
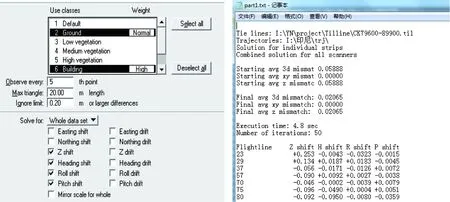
图6 系统偏移量计算结果
以图6中的航带平差参数改正值对各航带进行改正,得出误差修正后新的Lidar点云数据,对比平差前后航线间的偏移量,如表2所示。

表2 航线标识与平差结果示意
将平差前后航带间高程差做成曲线对比图分析(如图7所示),可以看出:平差后的航带间高程误差均小于0.1 m,平差结果良好。
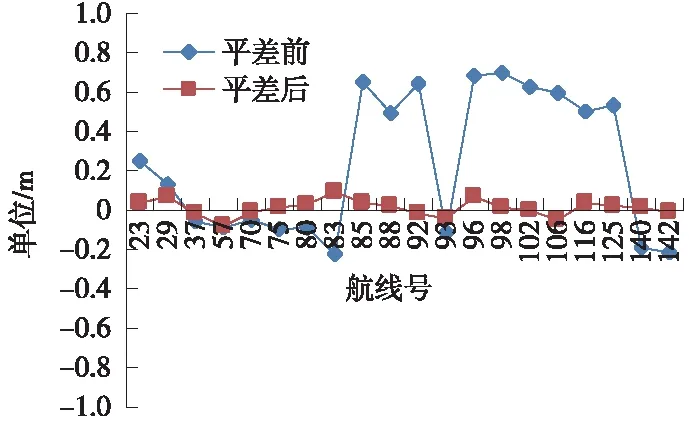
图7 平差前后航带高程误差对比
4 结论
航带平差的目的在于消除机载Lidar数据的系统误差,提高点云数据的精度。系统误差的存在导致航带重叠区同名特征间存在系统性偏移。因此,消除了相邻航带间的系统偏移,即达到了消除系统误差的目的。
借鉴了传统摄影测量区域网平差的思想,提出并实现了一种基于连接线的机载Lidar航带平差方法,并在项目中得到了应用,效果良好。为达到更好的平差效果,建议在多航带平差时,需单独设计点云的构架航线,以提高点云平差精度。
[1] 高文峰,王长进.铁路勘察中使用机载激光雷达测绘横断面相关问题的探讨[J].铁道勘察,2010(2)
[2] 李平苍.机载激光雷达技术在铁路横断面测绘中的应用[J].铁道勘察,2013(5)
[3] 朱庆,李志林.数字高程模型[M].武汉:武汉大学出版社,2000
[4] 王丽英,宋伟东,孙贵博.机载Lidar数据航带平差研究进展[J].遥感信息,2012(2)
[5] 王丽英,宋伟东.机载Lidar数据逐航带平差与区域网平差对比[J].测绘科学,2013(2)
[6] 赖旭东.机载激光雷达数据处理中若干关键技术的研究[D].武汉:武汉大学,2006
[7] 赖旭东.机载激光雷达基础原理与应用[M].北京:电子工业出版社,2010
[8] 张春亢.基于海量机载LiDAR数据的规则格网生成算法研究[D].福州:福建师范大学,2012
[9] 未永飞,杜正春,姚振强.激光雷达扫描数据的快速三角剖分及局部优化[J].激光技术,2009(12)
[10]王晏明,郭明.大规模点云数据的二维与三位混合索引方法[J].测绘学报,2012(8)
One Method of Strip Block Adjustment for Airborne Lidar Data Based on Tie Lines
CHENG Kou
2016-07-12
程 寇(1985—),男,2009年毕业于武汉大学摄影测量与遥感专业,工学硕士,工程师。
1672-7479(2016)05-0027-03
P225.2;P207+.2
B