一种高可靠摆杆远程控制系统
2016-12-06丁保民吴齐才刘丽媛
丁保民 吴齐才 刘丽媛
(北京航天发射技术研究所,北京 100076)
一种高可靠摆杆远程控制系统
丁保民 吴齐才 刘丽媛
(北京航天发射技术研究所,北京 100076)
描述了一种高可靠摆杆远程控制系统的组成、摆杆控制方法、远程冗余控制原理,以及摆杆控制通路的实现方式,采用基于热备冗余控制器和工业以太网构建的控制系统,能够可靠地实现设备的远程控制,大幅提高了设备可靠地完成任务的能力,并成功应用于新研制火箭的发射任务中。展望未来,该系统在各基地摆杆可靠性升级改造,以及电站、钢厂,以及其它要求远程控制、可靠性高的军用和民用控制领域均具有较高的应用价值。
摆杆,高可靠,远程控制
1 概 述
在航天发射场等活动发射平台上的脐带塔与试验设备整体运输、测试的过程中,摆杆电控系统[1]主要用于控制脐带塔上的摆杆带动试验设备脱落的连接器、管路、接头等摆开到安全范围内。本文设计的摆杆电控系统采用基于可编程逻辑控制器(PLC)和工业以太网的控制技术,实现了活动发射平台脐带塔摆杆的开合、油源电机启停等各种规定动作的控制,可监测系统工作状态参数,并具有冗余、故障诊断、远程控制等功能。其利用以太网交换机、光纤通信、控制器热备冗余等技术,实现了活动发射平台摆杆电控系统的技术飞跃,大幅提升了活动发射平台的智能化及可靠性水平,具有重要的战略意义。
该摆杆电控系统将基于冗余光纤和以太网组合的控制技术应用于活动发射平台,实现了高可靠性的远程控制。为了确保摆杆电控系统能够在前端现场无人的情况下,可靠地完成活动发射平台摆杆摆开的关键动作,增加了一路专用应急控制通道,作为远控自动模式失效时摆杆仍可强制摆开的备用方案。
2 摆杆电控系统设计
2.1 摆杆电控系统组成
该摆杆电控系统由后端、前端及光纤网络等三大部分组成,其中,后端部分包括后端主工作站、后端备工作站、后端主交换机、后端备交换机、后端摆杆应急控制盒、后端信号转接盒等;光纤网络部分包括主传输光纤、备传输光纤、应急光纤等;前端部分包括前端主交换机、前端备交换机、前端主PLC、前端备PLC、前端信号转接盒、前端执行机构等。该摆杆电控系统的组成结构如图1所示。
2.2 摆杆控制方法

图1 摆杆电控系统组成图
该摆杆电控系统采用PLC控制电机、电磁阀、继电器工作,电机带动液压泵为液压系统提供动力,如图2所示。PLC的DO模板控制电磁换向阀开启,控制摆杆摆开、摆回。按照设定的摆杆运动曲线,通过调节PLC的AO模板输出模拟量参数到压力和流量放大板,压力和流量放大板控制比例溢流阀和比例流量阀,实现液压系统压力和流量的调控,油缸推动传动机构带动摆杆运动,从而控制摆杆的摆动速度,控制摆杆启动时做匀加速运动,停止时做匀减速运动。在摆杆的起始点、加速点、减速点、停止点分别设置限位开关,用于判断摆杆摆开或摆回的位置。整个
控制过程中,摆杆分别经历启动、加速运行段、匀速运行段、减速运行段、低速运行段、停止等历程。
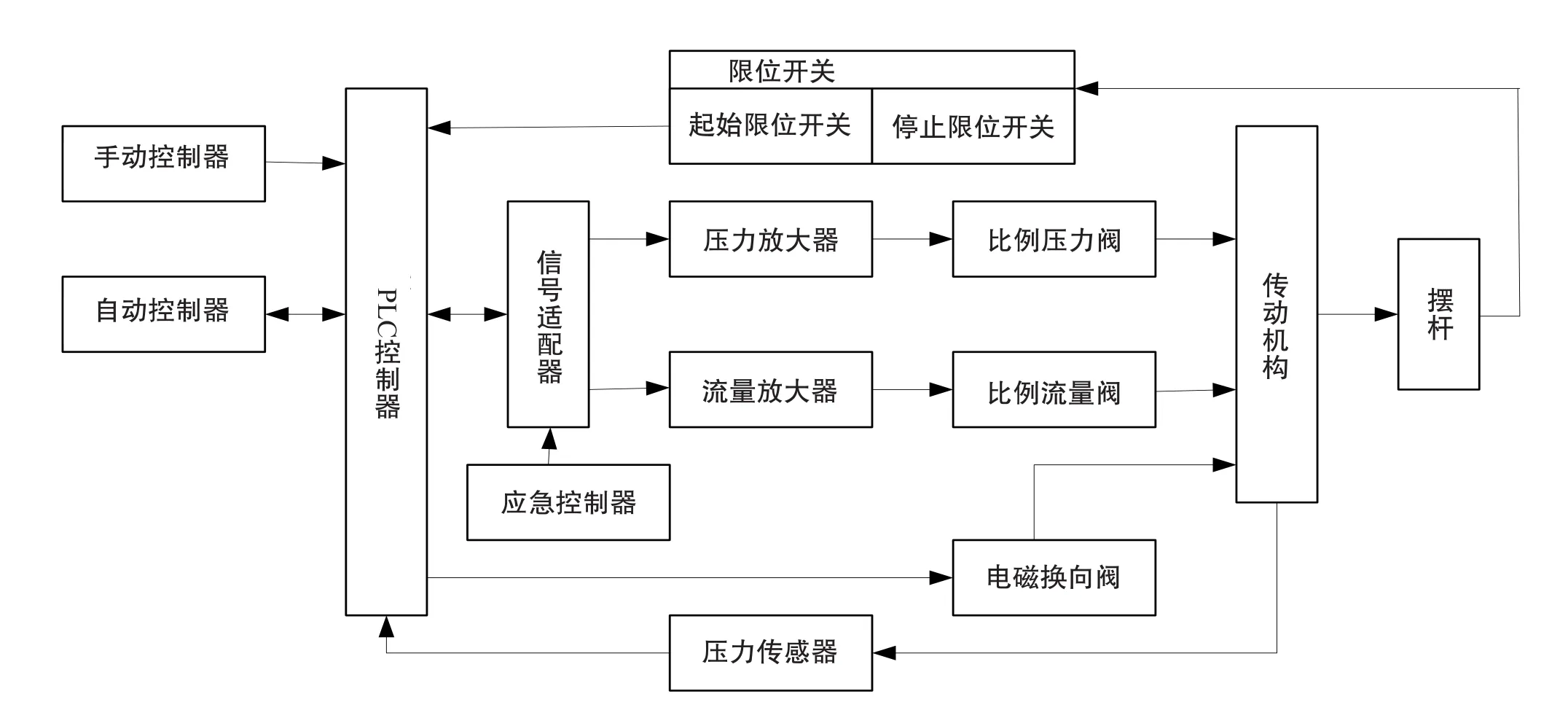
图2 摆杆控制框图
2.3 系统控制模式
该摆杆电控系统采用集中控制、模块化设计,可选择近控、远控两种工作方式,其中,近控又可分为手动、PLC控制两种控制模式,可实现无扰互锁双重冗余控制。其控制模式如图3所示。
在近控PLC控制模式下,设备分布于前端区域内,前端指令控制上位机,逻辑控制下位机CPU、输入输出信号控制模块,相互独立,互为冗余。前端系统采用基于美国GE公司的RX7i和RX3i系列PLC,设计构建了双网复合型网络构架模式,整个系统不仅在输入/输出(I/O)模块上实现了不同子站间的互备冗余,在网络链路节点上也进行了双通信模块的同时环网构建。
在近控手动控制模式下,该摆杆电控系统利用分立元件搭建等效于自动模式控制下的控制指令及重要输出信号,用于网络或PLC控制模式失效情况下的人工系统控制。
远程控制的硬件平台为两台远程控制台,内设数据库服务器,每台都设有IP绑定的双网卡接口,双网卡分别连接到总控网后端交换机H1、H2上,构成网卡、交换机的网络热备冗余系统,同时,两台工作站之间实现定时信息交互,以监控彼此的运行状态,当一台工作站发现另一台工作站运行异常时,执行切换程序,实现控制权的转移,从而实现整机热备功能。
2.4 远程冗余控制
该摆杆电控系统利用远端实现终端对近端油源电机的启停、脐带塔摆杆的开合等动作的控制。试验场前端为活动发射平台前置设备间,后端为指挥大厅,距离数千米。
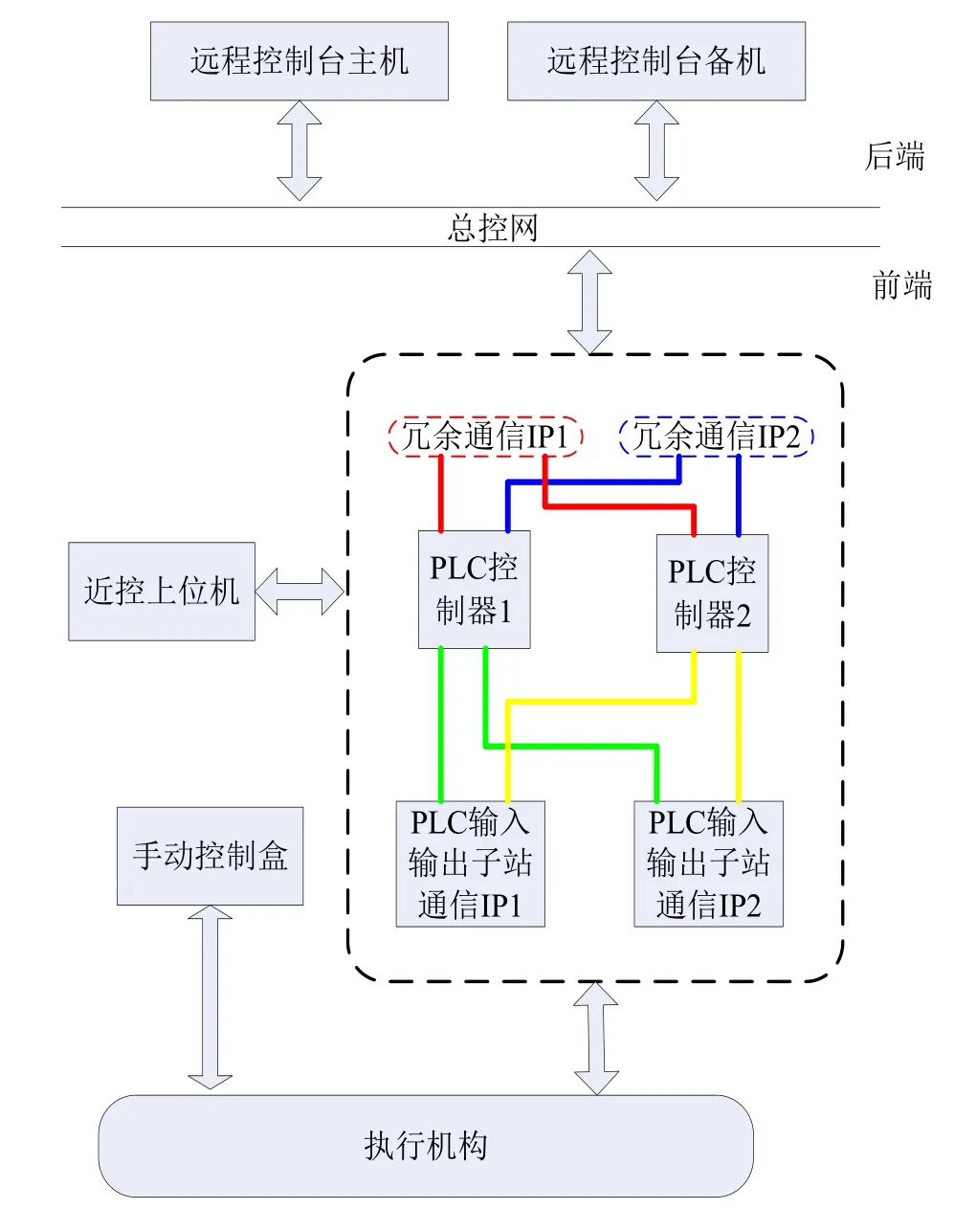
图3 系统控制模式简图
摆杆电控系统由于具有无人化和远程化特性,其自身必须保证高可靠性并具备冗余和故障诊断能力,以确保摆杆动作顺利完成[2]。摆杆电控系统正常工作时,后端两台工作站、后端两台交换机、前端两台交换机、前端两组PLC控制器互相构成主备冗余,前、后端采用单模光纤进
行信号传输,主、备交换机之间采用多模光纤进行同步,后端主、备交换机,前端主、备交换机通过光纤形成4个节点的环形网络,当某台交换机失效或某段光路断开时,前、后端之间的通信仍能继续进行。后端主、备工作站使用网线分别接入后端主、备交换机,每台工作站均配备双网卡且进行绑定,断开其中一段链路或关闭一台后端交换机系统时仍能正常工作。前端主、备PLC之间采用同步光纤进行热备冗余,当主PLC失效时系统无缝切换到备PLC。前端主备PLC与前端交换机之间使用网线进行交叉互联,保证任一段链路断开或交换机失效时系统仍能正常工作。
后端工作站将控制指令通过交换机和光纤网络传输到前端PLC,前端PLC按照预先编写的程序控制I/O模块完成各执行机构相应动作。前端PLC采集到传感器和液压阀块的状态量也返回到后端工作站显示界面。
当后端工作站或前端PLC失效时,活动发射平台将无法完成指定动作,因此,要在试验场单独配套应急光纤网络,以实现摆杆强制摆开功能,具体方式为:后端摆杆应急控制盒发出摆开电信号,经过后端信号转接盒转化为光信号,通过应急光纤传输到前端信号转接盒,再转换为电信号,摆开电信号控制前端强摆电路完成摆杆摆开动作,当摆杆完全摆开后,再通过该回路将“摆杆摆开好”信号返回后端。
2.5 摆杆控制通路实现方式
该摆杆电控系统在控制电路设计上,设计有主通路控制、备通路控制和应急控制等3种控制方式,并在硬件上设计有三路互锁的控制电路[3]。
该摆杆电控系统采用基于GE公司的RX7i系列PLC,具有安全热备份功能,两台PLC进行数据同步完成热备份功能,一旦工作PLC发生问题,可迅速将控制权转交给备份PLC,能够在对PLC无干扰的情况下进行PC机切换,使被控设备保持正常运行状态,切换时间不超过PLC的一个扫描周期,为了确保顺利转换,两个PLC的CPU转换通过同步电缆通讯、处理程序,数据寄存器、定时器、计数器和其它数据保持实时的数据刷新。这种类似于GE Rx7i的双冗余控制器(CPU)的设计方式具有自主故障诊断、无扰动程控切机等功能。
当主备PLC模块皆出现故障或无法正常工作时,后端的摆杆应急控制盒发出强摆信号,信号经过光电转换后控制前端继电器动作,从而完成相应的动作。
“摆杆摆开”控制正常执行过程中,总控发出“摆杆摆开”网络命令,电控系统后端上位机接收命令,并发送给电控系统前端PLC,PLC接收并执行主通路“摆杆摆开”指令,控制液压主回路工作,执行摆杆摆开动作,如果液压主回路故障,数秒内未收到特定位置的限位开关信号,PLC执行备通路摆开指令切换至液压备份回路,摆杆到位后,限位开关触发“摆杆摆开好”信号,“摆杆摆开好”信号通过PLC发送至网络。
“摆杆强摆”控制是通过应急装置,避开总体以太网和PLC控制回路,直接控制液压执行机构的方式:总控发出“摆杆强摆”手动命令到后端应急控制盒,强摆信号经过电/光转换至光纤,经由应急光纤,信号传递至前端应急控制盒,经过光/电信号转换送至电控系统摆杆应急控制盒,控制摆杆的液压备份回路工作,切断比例溢流阀,摆杆执行摆开动作,摆杆到位,限位开关触发“摆杆摆开好”信号,“摆杆摆开好”信号通过PLC发送至网络。
3 实施效果
该摆杆电控系统实现了远控、近控两种控制模式冗余,在远端控制模式下,分区域相互独立,设计构建了双网复合型网络架构模式,整个系统不仅在输入/输出模块上实现了不同子站间的互备冗余,在网络链路节点上也进行了双通信模块的同时环网构建,大幅提高了系统的总体可靠性;在近控手动控制模式下,利用分立元件搭建了等效于自动模式控制下的控制指令及重要输出信号,用于网络或PLC控制模式失效下的人工系统控制,实现了大型活动发射平台摆杆电控系统的架构搭建,大幅提高了系统的可靠性,为活动发射平台动作流程的控制项目提供了有效的保障。
该摆杆电控系统采用比例调速控制技术,解决了控制长摆杆快速摆开的惯性冲击难题,根据载荷计算出理想曲线进行控制,抵消了摆杆转动惯量对系统的影响,提高了摆杆摆动的平稳性和摆杆的定位精度;采用主、备、应急三重冗余控制模式,确保了摆杆能够可靠地摆开。
4 结束语
该摆杆电控系统首次在活动发射平台脐带塔上实现了摆杆远程控制,形成了具有主、备、应急3个控制通道的摆杆控制系统,应用了一种基于以太网和光纤传输的高可靠远控和近控系统,实现了活动发射平台无人化和远程化控制,提高了平台的自动化水平,以及完成多任务的能力。随着远程控制技术的发展,展望未来,该系统在各基地摆杆可靠性升级改造,以及电站、钢厂等要求系统冗余、可靠性高的军用和民用领域具有广阔的应用前景。
1 丁保民. 一种高可靠摆杆控制系统[P]. 中国, 201120416745.8. 2012-07-04
2 林辉. 活动发射平台远程电气控制系统[P]. 中国, 201410503395.7. 2014-09-26
3 吴齐才. 一种高可靠摆杆控制系统及控制方法[P]. 中国, 201110331942.4. 2011-10-27
1009-8119(2016)11(1)-0058-03
